

Overcoming Dilution of Collision Probability in Satellite Conjunction Analysis via Confidence Distribution



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Backgrounds
2.1. Probability Dilution in Satellite Conjunction Analysis
2.2. Confidence Distribution
3. Ambiguity in Confidence Level of an Observed CI
- If , the observed CI becomes two-sided interval with .
- If , the observed CI becomes one-sided interval .
- If , the observed CI becomes an empty interval .
- If , the observed CI becomes two-sided closed interval .
- If , the observed CI becomes one-sided closed interval .
- If , the observed CI becomes .
4. CD for Satellite Conjunction Analysis
4.1. Point Mass in CD
4.2. Confidence of an Observed CI
- a.
- When the observed CI is two-sided with ,
- b.
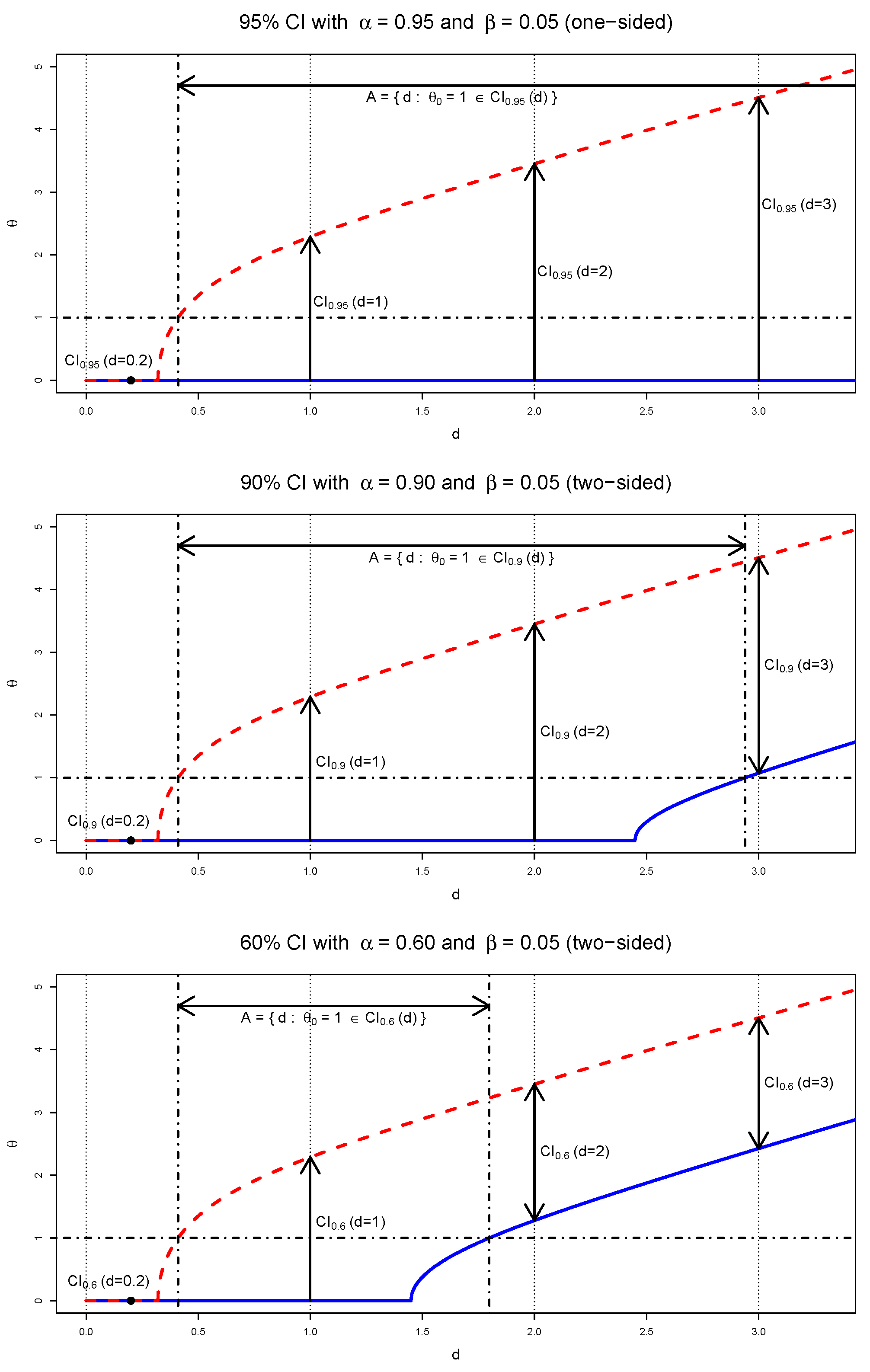
- When the observed CI becomes one-sided with and ,which is the maximum confidence level (coverage probability) of the CI procedures having the same observed CI. In Figure 1, the CI procedures with and produce the same observed CI for ,For this observed CI, the CD gives confidence
- c.
- When the observed CI becomes an empty set with , the point mass of the CD becomeswhich is the maximum confidence level of the CI procedures having an empty observed CI. In Figure 1, all the three CI procedures produce an empty observed CI for ,Here, the point mass of the CD iswhich implies that the CI procedure (5) produces an empty observed CI for .
5. Comparison with Related Methods
5.1. FD and GFD
5.2. Bayesian Posteriors
5.3. Consonant Belief
6. Further Advantages of CD
6.1. Direct Interpretation of CD for Hypothesis Testing
6.2. Satisfying Martin-Liu Validity Criterion for the Proposition of Interest
7. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CI | Confidence interval |
| CD | Confidence distribution |
| RP | Reference posterior |
| UP | Posterior under uniform (flat) prior |
| FD | Fiducial distribution |
| GFD | Generalized fiducial distribution |
Appendix A. Proof of Theorem 1
- (⇒) Suppose that there exists such that
- (⇐) Let d be an arbitrary value in , then (15) leads to
Appendix B. Null Belief Problem in CB
References
- Alfano, S. Relating position uncertainty to maximum conjunction probability. J. Astronaut. Sci. 2005, 53, 193–205. [Google Scholar] [CrossRef]
- Balch, M.S.; Martin, R.; Ferson, S. Satellite conjunction analysis and the false confidence theorem. Proc. R. Soc. A 2019, 475, 20180565. [Google Scholar] [CrossRef]
- Lee, Y. Resolving the induction problem: Can we state with complete confidence via induction that the sun rises forever? arXiv 2025, arXiv:2001.04110v3. [Google Scholar]
- Bayes, T. An Essay Towards Solving a Problem in the Doctrine of Chances. By the late Rev. Mr. Bayes, F. R. S. communicated by Mr. Price, in a Letter to John Canton, A. M. F. R. S. Philos. Trans. R. Soc. Lond. 1763, 53, 370–418. [Google Scholar]
- Laplace, P.S. A Philosophical Essay on Probabilities; Chapman and Hall: London, UK, 1814. [Google Scholar]
- Stein, C. An example of wide discrepancy between fiducial and confidence intervals. Ann. Math. Stat. 1959, 30, 877–880. [Google Scholar] [CrossRef]
- Pawitan, Y.; Lee, Y. Confidence as likelihood. Stat. Sci. 2021, 36, 509–517. [Google Scholar] [CrossRef]
- Fisher, R.A. Inverse probability. In Mathematical Proceedings of the Cambridge Philosophical Society; Cambridge University Press: Cambridge, UK, 1930; Volume 26, pp. 528–535. [Google Scholar]
- Schweder, T.; Hjort, N.L. Confidence, Likelihood, Probability; Cambridge University Press: Cambridge, UK, 2016; Volume 41. [Google Scholar]
- Pawitan, Y.; Lee, Y. Philosophies, Puzzles and Paradoxes: A Statistician’s Search for Truth; CRC Press: Boca Raton, FL, USA, 2024. [Google Scholar]
- Lee, H.; Lee, Y. Statistical Inference for Random Unknowns via Modifications of Extended Likelihood. arXiv 2025, arXiv:2310.09955v3. [Google Scholar]
- Cunen, C.; Hjort, N.L.; Schweder, T. Confidence in confidence distributions! Proc. R. Soc. A 2020, 476, 20190781. [Google Scholar] [CrossRef]
- Martin, R.; Balch, M.S.; Ferson, S. Response to the comment Confidence in confidence distributions! Proc. R. Soc. A 2021, 477, 20200579. [Google Scholar] [CrossRef]
- Balch, M.S. Mathematical foundations for a theory of confidence structures. Int. J. Approx. Reason. 2012, 53, 1003–1019. [Google Scholar] [CrossRef]
- Denoeux, T.; Li, S. Frequency-calibrated belief functions: Review and new insights. Int. J. Approx. Reason. 2018, 92, 232–254. [Google Scholar]
- Balch, M.S. New two-sided confidence intervals for binomial inference derived using Walley’s imprecise posterior likelihood as a test statistic. Int. J. Approx. Reason. 2020, 123, 77–98. [Google Scholar]
- Hannig, J. On generalized fiducial inference. Stat. Sin. 2009, 19, 491–544. [Google Scholar]
- Bernardo, J.M. Reference posterior distributions for Bayesian inference. J. R. Stat. Soc. Ser. B Stat. Methodol. 1979, 41, 113–128. [Google Scholar] [CrossRef]
- Frigm, R.C.; Newman, L.K. A single conjunction risk assessment metric: The F-value. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Pittsburgh, PA, USA, 9–13 August 2009. number AAS-09-373. [Google Scholar]
- Plakaloic, D.; Hejduk, M.; Frigm, R.; Newman, L. A tuned single parameter for representing conjunction risk. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Girdwood, AK, USA, 31 July–4 August 2011. number AAS-11-430. [Google Scholar]
- Carpenter, J.R.; Alfano, S.; Hall, D.T.; Hejduk, M.D.; Gaebler, J.A.; Jah, M.K.; Hasan, S.O.; Besser, R.L.; DeHart, R.R.; Duncan, M.G.; et al. Relevance of the American statistical society’s warning on P-values for conjunction assessment. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Stevenson, WA, USA, 20–24 August 2017. number GSFC-E-DAA-TN49960. [Google Scholar]
- Newman, L.K.; Frigm, R.C.; Duncan, M.G.; Hejduk, M.D. Evolution and Implementation of the NASA Robotic Conjunction Assessment Risk Analysis Concept of Operations. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 9–12 September 2014; Ryan, S., Ed.; p. E3. [Google Scholar]
- Alfriend, K.T.; Akella, M.R.; Frisbee, J.; Foster, J.L.; Lee, D.J.; Wilkins, M. Probability of collision error analysis. Space Debris 1999, 1, 21–35. [Google Scholar]
- Patera, R.P. General method for calculating satellite collision probability. J. Guid. Control Dyn. 2001, 24, 716–722. [Google Scholar] [CrossRef]
- Serra, R.; Arzelier, D.; Joldes, M.; Lasserre, J.B.; Rondepierre, A.; Salvy, B. Fast and accurate computation of orbital collision probability for short-term encounters. J. Guid. Control Dyn. 2016, 39, 1009–1021. [Google Scholar] [CrossRef]
- Merz, K.; Bastida Virgili, B.; Braun, V.; Flohrer, T.; Funke, Q.; Krag, H.; Lemmens, S.; Siminski, J. Current collision avoidance service by ESA’s Space Debris Office. In Proceedings of the 7th European Conference on Space Debris, Darmstadt, Germany, 18–21 April 2017; p. 219. [Google Scholar]
- Wilkinson, G.N. On resolving the controversy in statistical inference. J. R. Stat. Soc. Ser. B Stat. Methodol. 1977, 39, 119–144. [Google Scholar]
- Edwards, A.W.F. Discussion of Mr. Wilkinson’s paper. J. R. Stat. Soc. Ser. B Stat. Methodol. 1977, 39, 144–145. [Google Scholar]
- Dawid, A.P.; Stone, M.; Zidek, J.V. Marginalization paradoxes in Bayesian and structural inference. J. R. Stat. Soc. Ser. B Stat. Methodol. 1973, 35, 189–213. [Google Scholar]
- Pawitan, Y.; Lee, Y. Wallet game: Probability, likelihood, and extended likelihood. Am. Stat. 2017, 71, 120–122. [Google Scholar]
- Bjørnstad, J.F. On the generalization of the likelihood function and the likelihood principle. J. Am. Stat. Assoc. 1996, 91, 791–806. [Google Scholar]
- Pawitan, Y.; Lee, H.; Lee, Y. Epistemic confidence in the observed confidence interval. Scand. J. Stat. 2023, 50, 1859–1883. [Google Scholar]
- Pedersen, J. Fiducial inference. Int. Stat. Rev. Int. Stat. 1978, 46, 147–170. [Google Scholar]
- Dempster, A.P. Upper and lower probabilities generated by a random closed interval. Ann. Math. Stat. 1968, 39, 957–966. [Google Scholar]
- Shafer, G. A Mathematical Theory of Evidence; Princeton University Press: Princeton, NJ, USA, 1976. [Google Scholar]
- Hejduk, M.; Snow, D. Satellite Conjunction “Probability”, “Possibility”, and “Plausibility”: A Categorization of Competing Conjunction Assessment Risk Assessment Paradigms. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, Portland, ME, USA, 11–15 August 2019. [Google Scholar]
- Hejduk, M.D.; Snow, D.; Newman, L. Satellite conjunction assessment risk analysis for “dilution region” events: Issues and operational approaches. In Proceedings of the Space Traffic Management Conference, Austin, TX, USA, 26–27 February 2019. [Google Scholar]
- Martin, R.; Liu, C. Inferential Models: Reasoning with Uncertainty; CRC Press: Boca Raton, FL, USA, 2015; Volume 145. [Google Scholar]
- Sánchez, L.; Vasile, M.; Sanvido, S.; Merz, K.; Taillan, C. Treatment of epistemic uncertainty in conjunction analysis with Dempster-Shafer theory. Adv. Space Res. 2024, 74, 5639–5686. [Google Scholar]
- Sánchez, L.; Vasile, M. On the use of machine learning and evidence theory to improve collision risk management. Acta Astronaut. 2021, 181, 694–706. [Google Scholar] [CrossRef]
- McKnight, D.; Oltrogge, D.; Vasile, M.; Shouppe, M. Space traffic coordination framework for success. In Proceedings of the 22nd IAA Symposium on Space Debris, Milan, Italy, 14–18 October 2024; pp. 172–187. [Google Scholar]
- Lee, Y.; Kim, G. H-likelihood Predictive Intervals for Unobservables. Int. Stat. Rev. 2016, 84, 487–505. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.; Lee, Y. Overcoming Dilution of Collision Probability in Satellite Conjunction Analysis via Confidence Distribution. Entropy 2025, 27, 329. https://doi.org/10.3390/e27040329
Lee H, Lee Y. Overcoming Dilution of Collision Probability in Satellite Conjunction Analysis via Confidence Distribution. Entropy. 2025; 27(4):329. https://doi.org/10.3390/e27040329
Chicago/Turabian StyleLee, Hangbin, and Youngjo Lee. 2025. "Overcoming Dilution of Collision Probability in Satellite Conjunction Analysis via Confidence Distribution" Entropy 27, no. 4: 329. https://doi.org/10.3390/e27040329
APA StyleLee, H., & Lee, Y. (2025). Overcoming Dilution of Collision Probability in Satellite Conjunction Analysis via Confidence Distribution. Entropy, 27(4), 329. https://doi.org/10.3390/e27040329