
Understanding the Impact of Evaluation Metrics in Kinetic Models for Consensus-Based Segmentation


Abstract
1. Introduction
2. Consensus Modeling and Applications to Image Segmentation
2.1. The 2D-Bounded Confidence Model
2.2. Kinetic Models for Consensus Dynamics
2.3. Application to Image Segmentation
3. Evaluation Metrics and Parameter Estimation
3.1. DSMC Algorithm for Image Segmentation
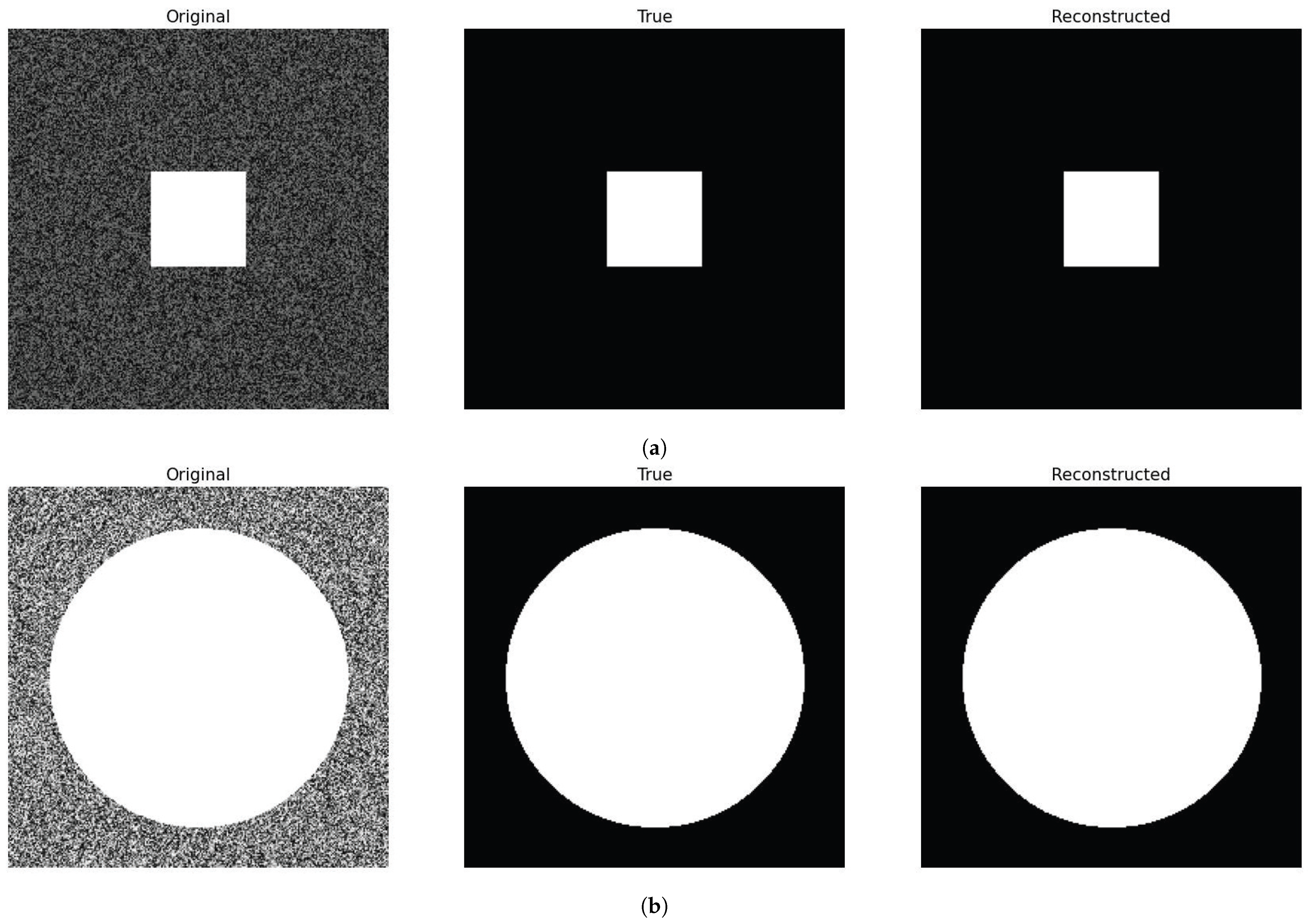
3.2. Generation of Model-Oriented Segmentation Masks
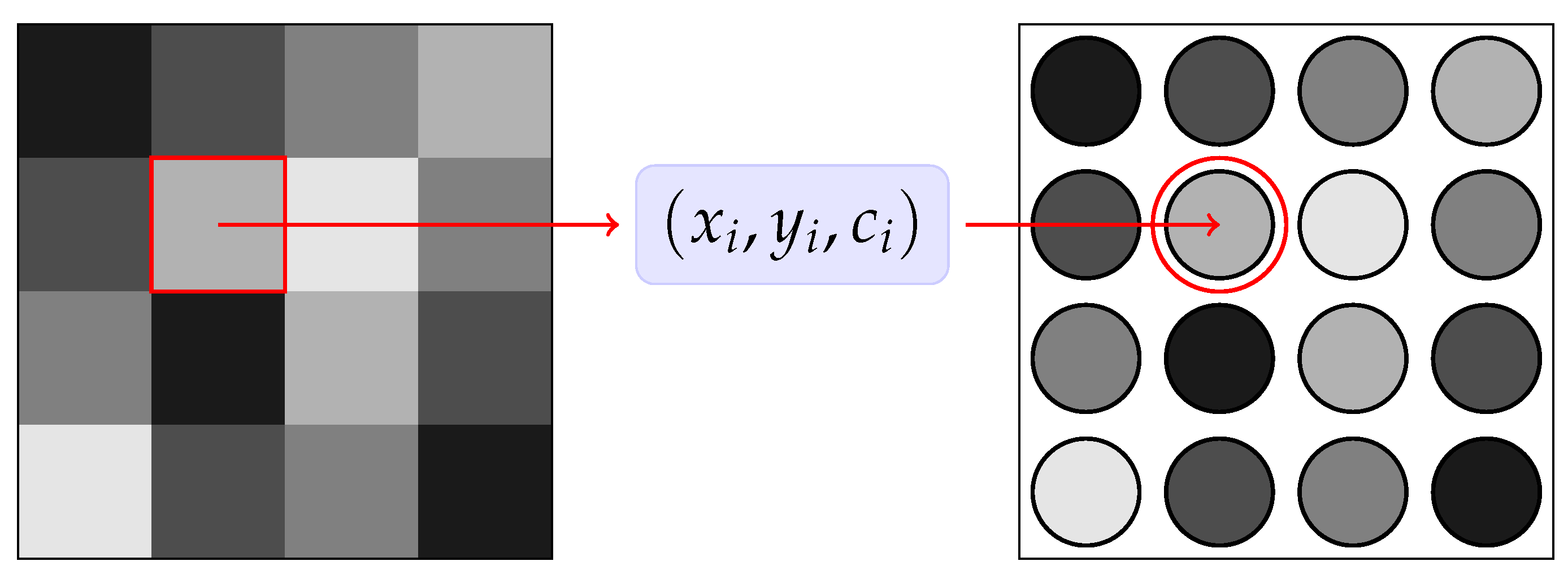
- We begin by associating each pixel with a position vector and with static feature . We scale the vector position to a domain and the static feature to .
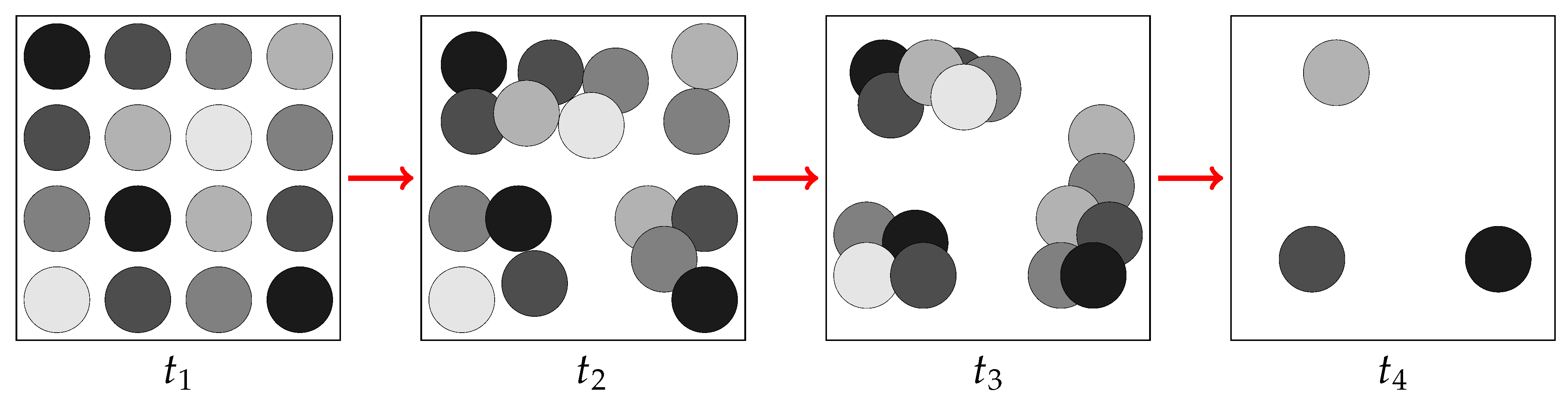
- We apply a DSMC approach as described in Algorithm 1 to numerically approximate the large-time solution of the Boltzmann-type model defined in (17). This approach enables pixels to aggregate into clusters based on their Euclidean distance and gray color level.
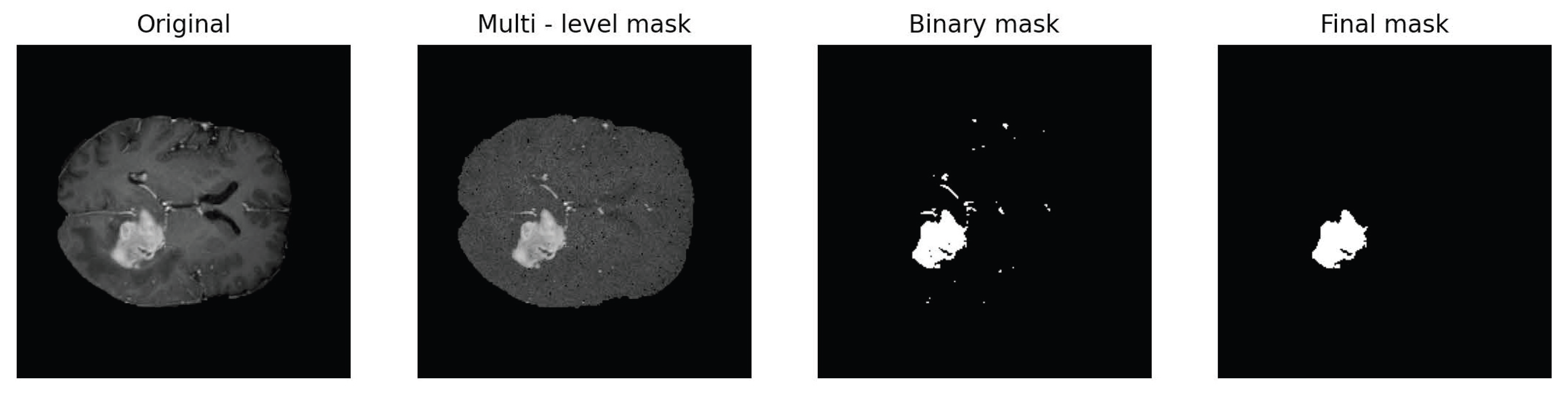
- The segmentation masks are generated by assigning to the original position of each pixel the mean values of the clusters they belong to. Thus, we generate a multi-level mask composed of a number of homogenous regions.
- Finally, we obtain the binary mask by defining a threshold such thatFor all the following experiments, is defined as the 10th percentile of pixels in the image that belong to the region of interest. This percentile was chosen as an optimal value for brain tumor images; however, it could also be considered as a parameter to be optimized within the process outlined in the section on parameter optimization.
| Algorithm 1 DSMC algorithm for Boltzmann equation |
|
Parameter Optimization
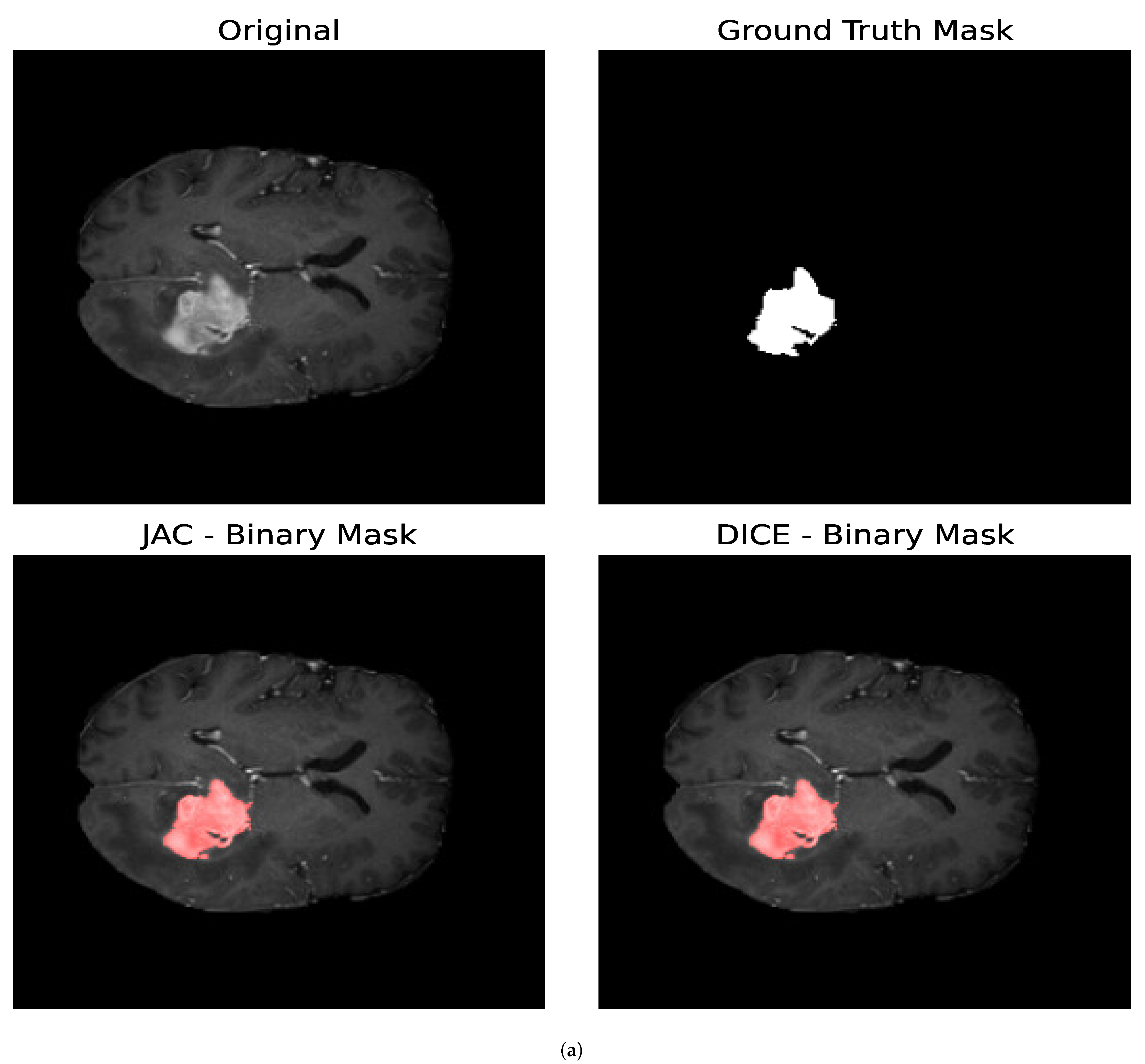
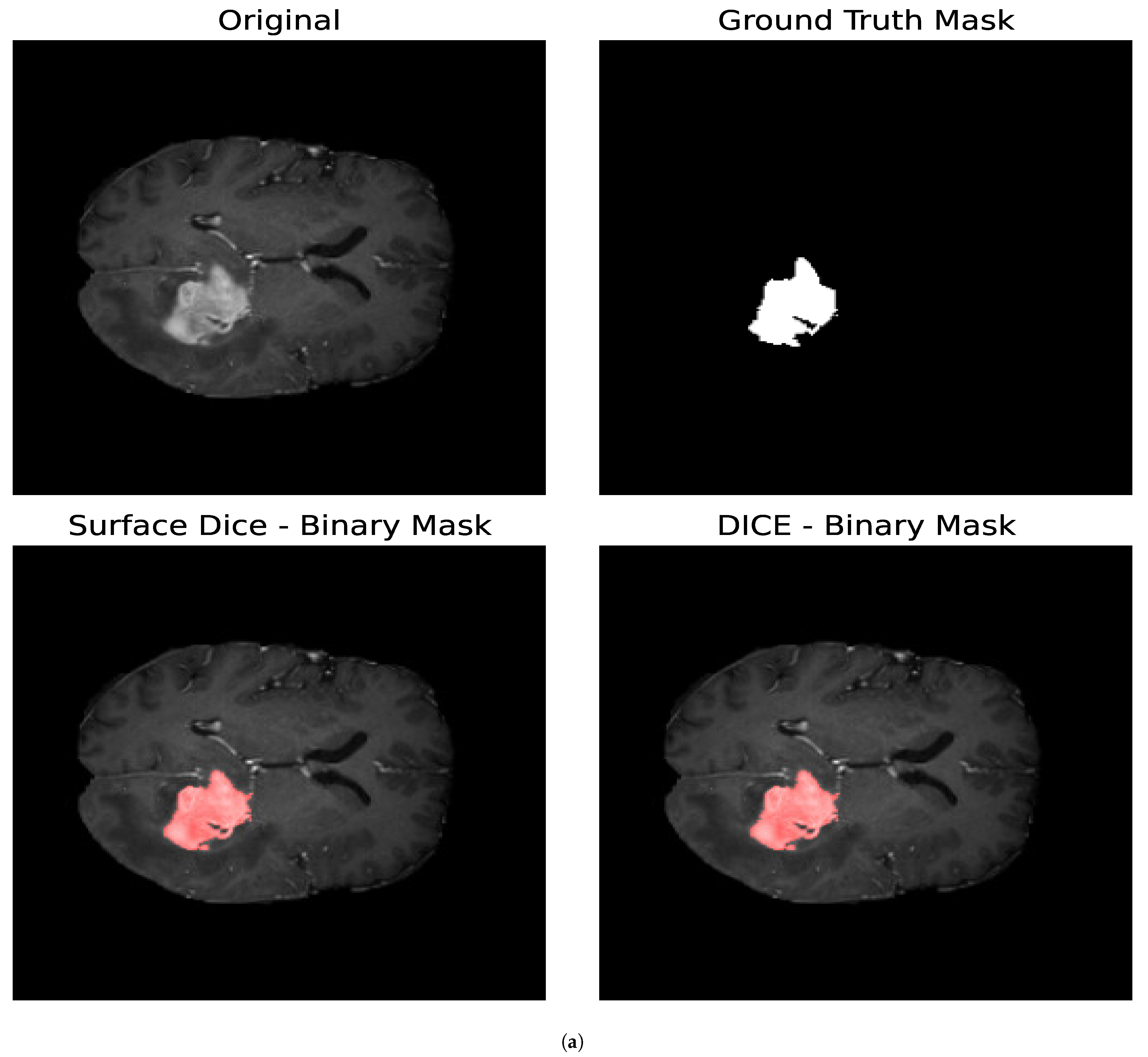
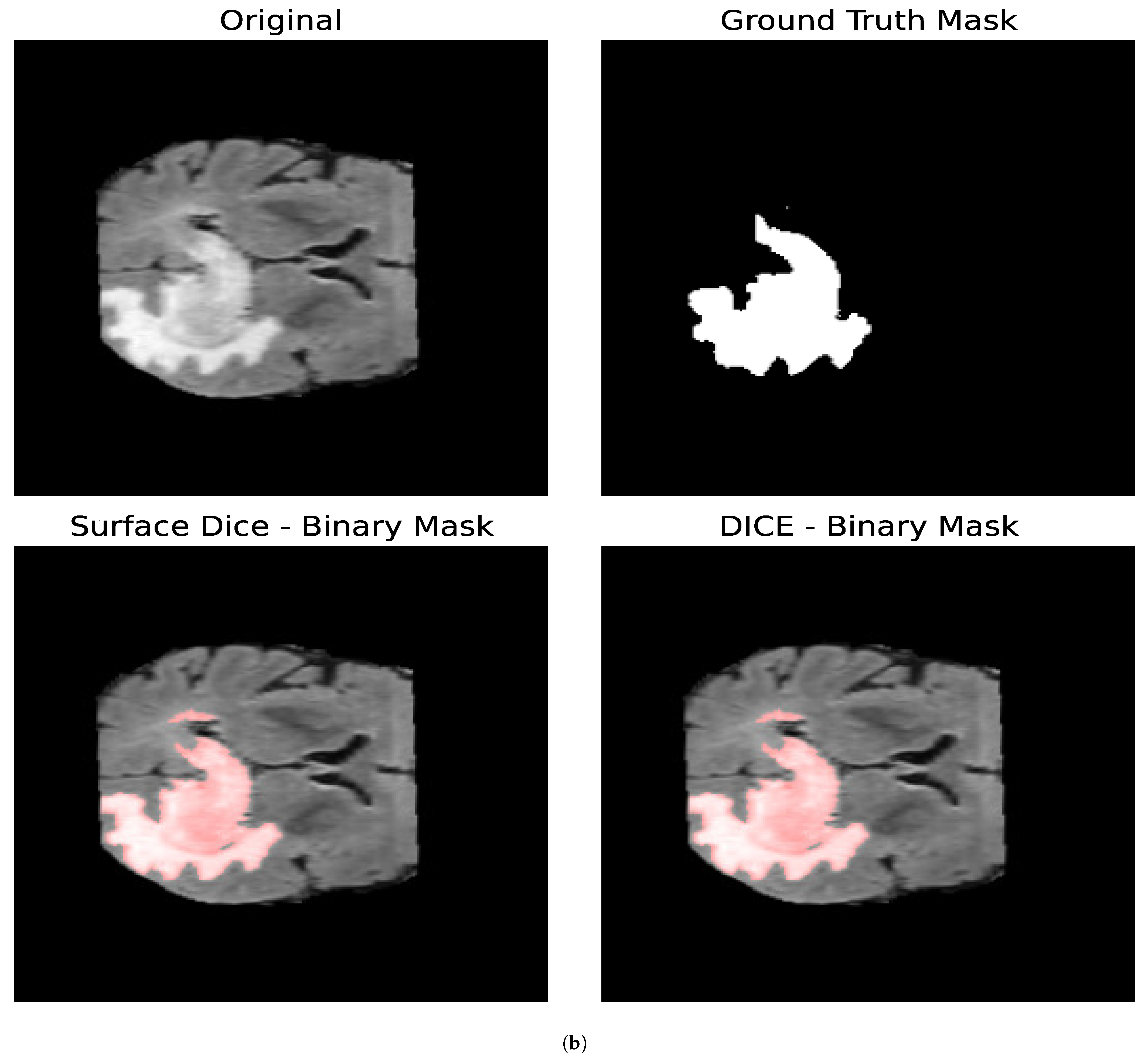
3.3. Segmentation Metrics
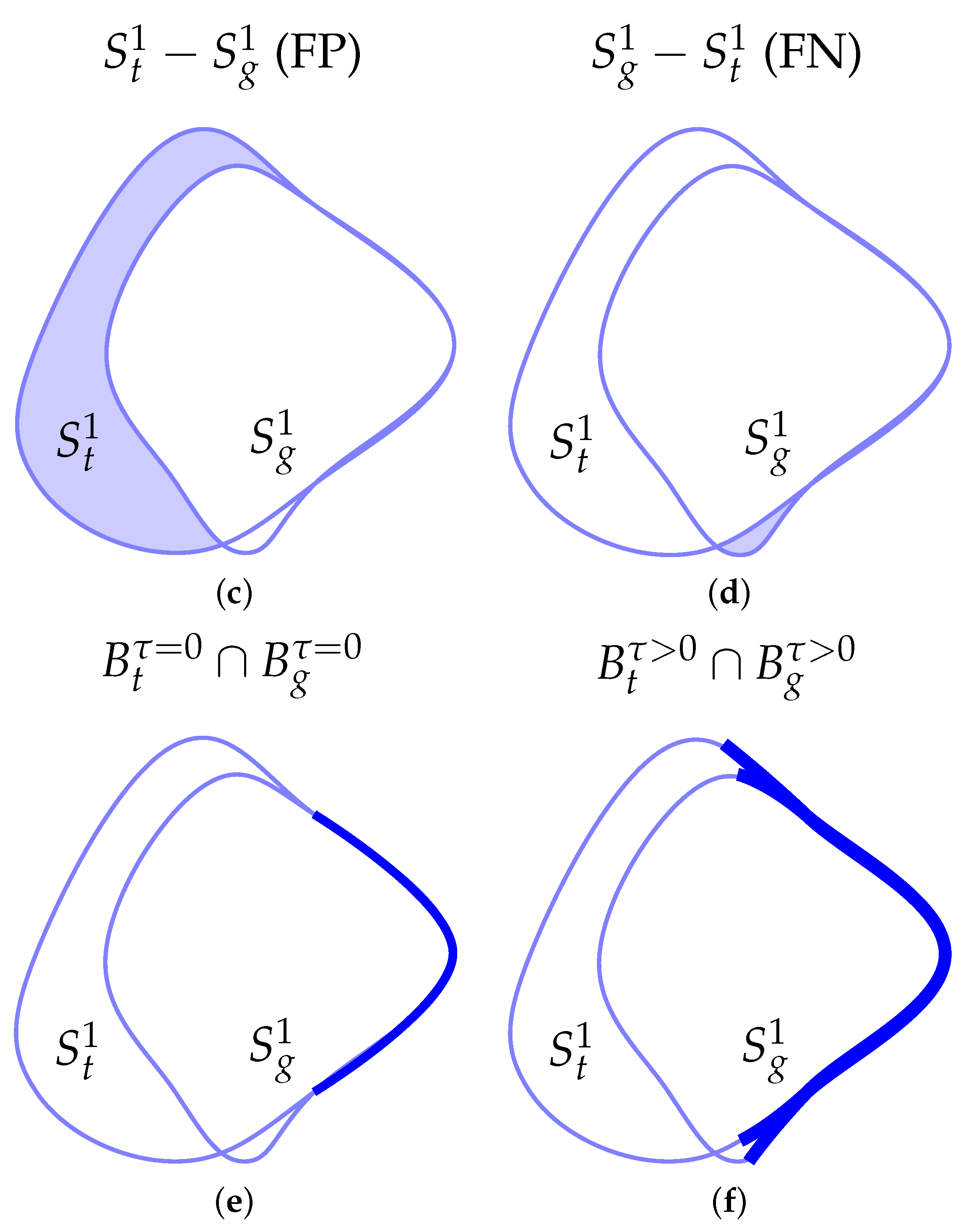
3.3.1. Volumetric and Surface Dice Indexes
3.3.2. Jaccard Index
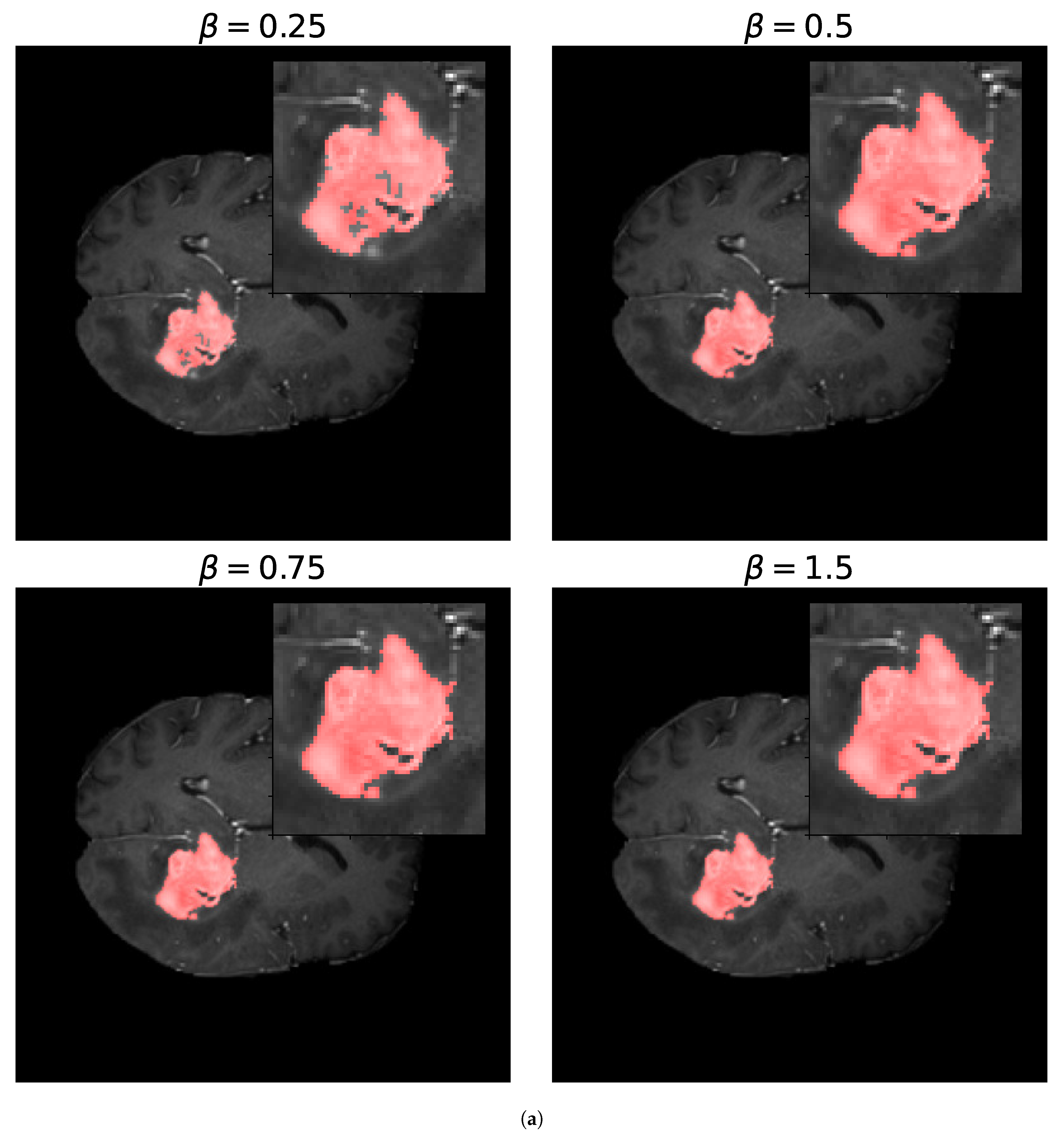
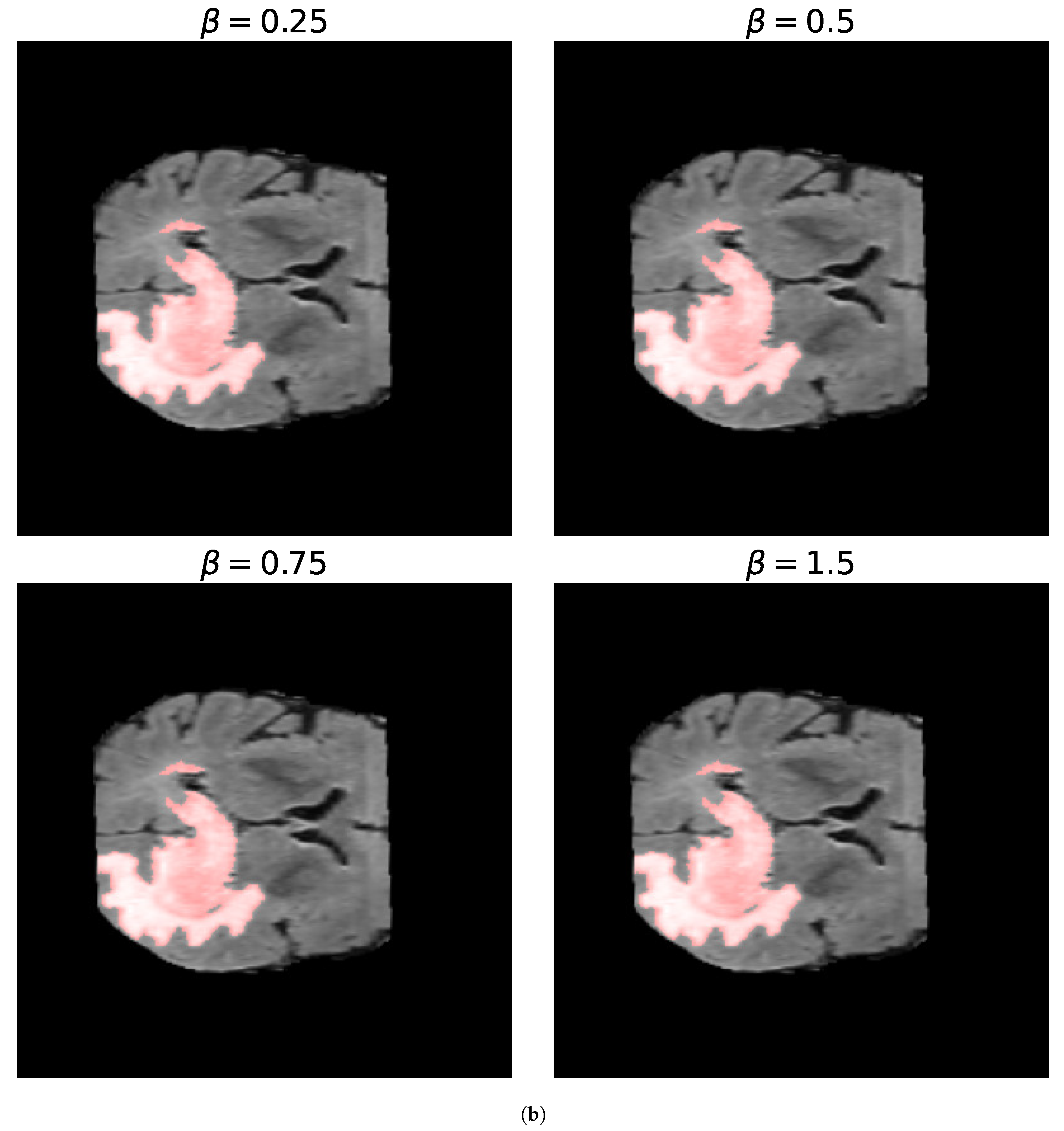
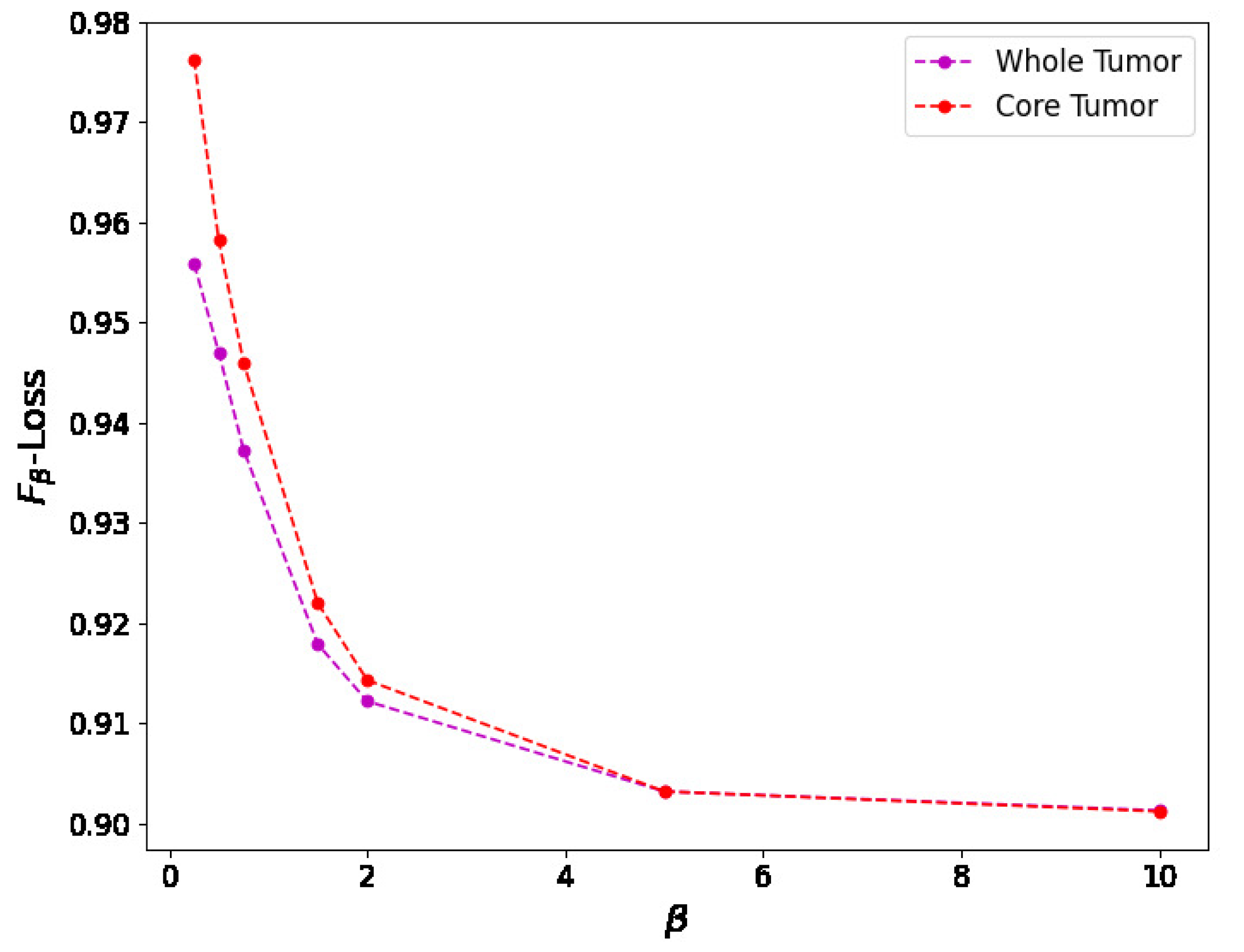
3.3.3. -Measure
4. Numerical Results
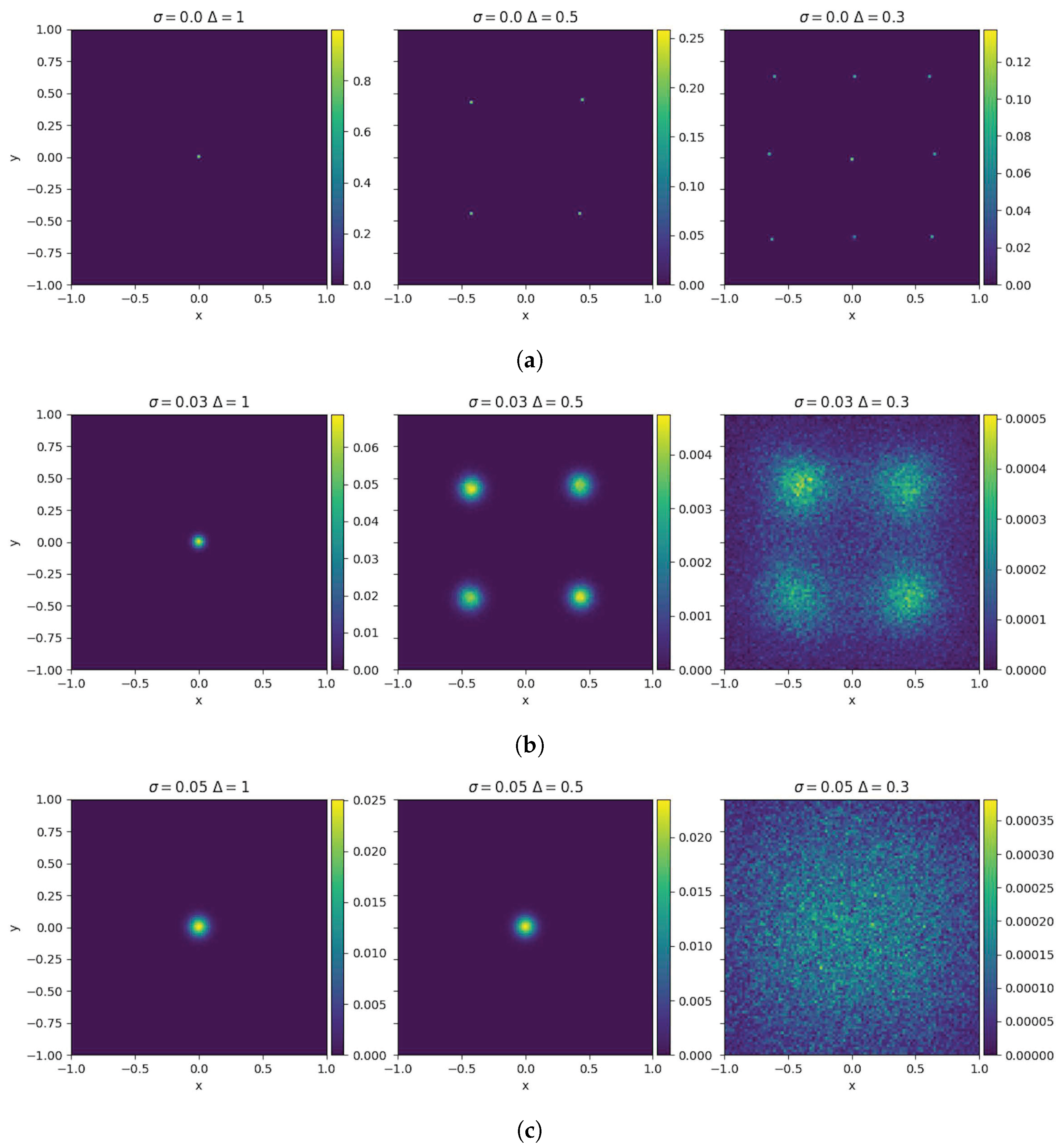
4.1. Impact of Different Diffusion Functions
4.2. Determining the Final Time
4.3. Optimization Metrics for Biomedical Image Segmentation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Agosti, A.; Shaqiri, E.; Paoletti, M.; Solazzo, F.; Bergsland, N.; Colelli, G.; Savini, G.; Muzic, S.; Santini, F.; Deligianni, X.; et al. Deep learning for automatic segmentation of thigh and leg muscles. Magn. Reson. Mater. Phys. Biol. Med. 2021, 35, 467–483. [Google Scholar] [CrossRef]
- Barbano, R.; Arridge, S.; Jin, B.; Tanno, R. Uncertainty quantification in medical image synthesis. In Biomedical Image Synthesis and Simulation: Methods and Applications; The MICCAI Society book Series, Biomedical Image Synthesis and Simulation; Academic Press: Cambridge, MA, USA, 2022; pp. 601–641. [Google Scholar]
- Coupé, P.; Manjón, J.; Fonov, V.; Pruessner, J.; Robles, M.; Collins, D. Patch-based segmentation using expert priors: Application to hippocampus and ventricle segmentation. NeuroImage 2011, 54, 940–954. [Google Scholar] [CrossRef] [PubMed]
- Medaglia, A.; Colelli, G.; Farina, L.; Bacila, A.; Bini, P.; Marchioni, E.; Figini, S.; Pichiecchio, A.; Zanella, M. Uncertainty quantification and control of kinetic models of tumour growth under clinical uncertainties. Int. J. Non-Linear Mech. 2022, 141, 103933. [Google Scholar] [CrossRef]
- Nikolov, S.; Blackwell, S.; Mendes, R.; Fauw, J.; Meyer, C.; Hughes, C.; Askham, H.; Romera-Paredes, B.; Karthikesalingam, A.; Chu, C.; et al. Deep learning to achieve clinically applicable segmentation of head and neck anatomy for radiotherapy. arXiv 2018, arXiv:1809.04430. [Google Scholar]
- Sharma, N.; Aggarwal, L. Automated medical image segmentation techniques. J. Med. Phys. 2010, 35, 3. [Google Scholar] [CrossRef] [PubMed]
- Hesamian, M.; Jia, W.; He, X.; Kennedy, P. Deep learning techniques for medical image segmentation: Achievements and challenges. J. Digit. Imaging 2019, 32, 582–596. [Google Scholar] [CrossRef] [PubMed]
- Isensee, F.; Jaeger, P.; Kohl, S.; Petersen, J.; Maier-Hein, K. nnU-Net: A self-configuring method for deep learning-based biomedical image segmentation. Nat. Methods 2021, 18, 203–211. [Google Scholar] [CrossRef]
- Kwon, Y.; Won, J.; Kim, B.; Paik, M. Uncertainty quantification using Bayesian neural networks in classification: Application to biomedical image segmentation. Comput. Stat. Data Anal. 2020, 142, 106816. [Google Scholar] [CrossRef]
- Liu, X.; Song, L.; Liu, S.; Zhang, Y. A review of deep-learning-based medical image segmentation methods. Sustainability 2021, 13, 1224. [Google Scholar] [CrossRef]
- Lizzi, F.; Agosti, A.; Brero, F.; Cabini, R.F.; Fantacci, M.E.; Figini, S.; Lascialfari, A.; Laruina, F.; Oliva, P.; Piffer, S.; et al. Quantification of pulmonary involvement in COVID-19 pneumonia by means of a cascade of two U-nets: Training and assessment on multiple datasets using different annotation criteria. Int. J. Comput. Assist. Radiol. Surg. 2022, 17, 229–237. [Google Scholar] [CrossRef] [PubMed]
- Lizzi, F.; Postuma, I.; Brero, F.; Cabini, R.F.; Fantacci, M.E.; Lascialfari, A.; Oliva, P.; Rinaldi, L.; Retico, A. Quantification of pulmonary involvement in COVID-19 pneumonia: An upgrade of the LungQuant software for lung CT segmentation. Eur. Phys. J. Plus. 2023, 138, 326. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the 18th International Conference, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Yu, Z.; Au, O.; Zou, R.; Yu, W.; Tian, J. An adaptive unsupervised approach toward pixel clustering and color image segmentation. Pattern Recognit. 2010, 43, 1889–1906. [Google Scholar] [CrossRef]
- Zhou, Z.; Rahman Siddiquee, M.; Tajbakhsh, N.; Liang, J. Unet++: A nested u-net architecture for medical image segmentation. In Deep Learning in Medical Image Analysis And Multimodal Learning for Clinical Decision Support; Springer: Cham, Switzerland, 2018; pp. 3–11. [Google Scholar]
- Cordier, N.; Delingette, H.; Ayache, N. A patch-based approach for the segmentation of pathologies: Application to glioma labelling. IEEE Trans. Med. Imaging 2015, 35, 1066–1076. [Google Scholar] [CrossRef] [PubMed]
- Frigui, H.; Krishnapuram, R. A robust competitive clustering algorithm with applications in computer vision. IEEE Trans. Pattern Anal. Mach. Intell. 1999, 21, 450–465. [Google Scholar] [CrossRef]
- Jain, A.; Murty, M.; Flynn, P. Data clustering: A review. ACM Comput. Surv. 1999, 31, 264–323. [Google Scholar] [CrossRef]
- Kayal, S. Unsupervised image segmentation using the Deffuant-Weisbuch model from social dynamics. Signal Image Video Process. 2017, 11, 1405–1410. [Google Scholar] [CrossRef]
- Pizzagalli, D.; Gonzalez, S.; Krause, R. A trainable clustering algorithm based on shortest paths from density peaks. Sci. Adv. 2019, 5, eaax3770. [Google Scholar] [CrossRef]
- Quetti, F.M.; Figini, S.; Ballante, E. A Bayesian Approach to Clustering via the Proper Bayesian Bootstrap: The Bayesian Bagged Clustering (BBC) algorithm. arXiv 2024, arXiv:2409.08954. [Google Scholar]
- Cabini, R.; Pichiecchio, A.; Lascialfari, A.; Figini, S.; Zanella, M. A kinetic approach to consensus-based segmentation of biomedical images. Kinet. Relat. Models 2025, 18, 286–311. [Google Scholar] [CrossRef]
- Herty, M.; Pareschi, L. Visconti, G. Mean field models for large data–clustering problems. Netw. Heterog. Media. 2020, 15, 463. [Google Scholar] [CrossRef]
- Hegselmann, R.; Krause, U. Opinion dynamics and bounded confidence models, analysis, and simulation. J. Artif. Soc. Soc. Simul. 2002, 5, 3. [Google Scholar]
- Deffuant, G.; Neau, D.; Amblard, F.; Weisbuch, G. Mixing beliefs among interacting agents. Adv. Complex Syst. 2000, 3, 87–98. [Google Scholar] [CrossRef]
- DeGroot, M. Reaching a consensus. J. Am. Stat. Assoc. 1974, 69, 118–121. [Google Scholar] [CrossRef]
- French, J., Jr. A formal theory of social power. Psychol. Rev. 1956, 63, 181–194. [Google Scholar] [CrossRef] [PubMed]
- Sznajd-Weron, K.; Sznajd, J. Opinion evolution in closed communities. Int. J. Mod. Phys. C 2000, 11, 1157–1165. [Google Scholar] [CrossRef]
- Borra, D.; Lorenzi, T. Asymptotic analysis of continuous opinion models under bounded confidence. Commun. Pure Appl. Anal. 2013, 12, 1487–1499. [Google Scholar] [CrossRef]
- Castellano, C.; Fortunato, S.; Loreto, V. Statistical physics of social dynamics. Rev. Mod. Phys. 2009, 81, 591–646. [Google Scholar] [CrossRef]
- Fagioli, S.; Favre, G. Opinion formation on evolving network: The DPA method applied to a nonlocal cross-diffusion PDE-ODE system. Eur. J. Appl. Math. 2024, 35, 748–775. [Google Scholar] [CrossRef]
- Motsch, S.; Tadmor, E. Heterophilious dynamics enhances consensus. SIAM Rev. 2014, 56, 577–621. [Google Scholar] [CrossRef]
- Albi, G.; Pareschi, L.; Toscani, G.; Zanella, M. Recent advances in opinion modeling: Control and social influence. In Active Particles Volume 1, Advances in Theory, Models, and Applications; Bellomo, N., Degond, P., Tadmor, E., Eds.; Birkhäuser: Cham, Switzerland, 2017. [Google Scholar]
- Carrillo, J.A.; Fornasier, M.; Rosado, J.; Toscani, G. Asymptotic flocking dynamics for the kinetic Cucker-Smale model. SIAM J. Math. Anal. 2010, 42, 218–236. [Google Scholar] [CrossRef]
- Düring, B.; Wolfram, M.-T. Opinion dynamics: Inhomogeneous Boltzmann-type equations modelling opinion leadership and political segregation. Proc. R. Soc. Lond. A 2015, 471. [Google Scholar] [CrossRef]
- Fagioli, S.; Radici, E. Opinion formation systems via deterministic particles approximation. Kinet. Relat. Mod. 2021, 14, 45–76. [Google Scholar] [CrossRef]
- Pareschi, L.; Toscani, G. Interacting Multiagent Systems: Kinetic Equations and Monte Carlo Msethods; Oxford University Press: Oxford, UK, 2013. [Google Scholar]
- Pareschi, L.; Tosin, A.; Toscani, G.; Zanella, M. Hydrodynamic models of preference formation in multi-agent societies. J. Nonlin. Sci. 2019, 29, 2761–2796. [Google Scholar] [CrossRef]
- Toscani, G. Kinetic models of opinion formation. Commun. Math. Sci. 2006, 4, 481–496. [Google Scholar] [CrossRef]
- Auricchio, G.; Codegoni, A.; Gualandi, S.; Toscani, G.; Veneroni, M. On the equivalence between Fourier-based and Wasserstein metrics. Rend. Lincei Mat. Appl. 2020, 31, 627–649. [Google Scholar]
- Chinchor, N. MUC-4 Evaluation Metrics. 1992. Available online: https://aclanthology.org/M92-1002.pdf (accessed on 28 November 2024).
- Dice, L. Measures of the Amount of Ecologic Association Between Species. Ecology 1945, 26, 297–302. [Google Scholar] [CrossRef]
- Jaccard, P. The distribution of the flora in the alpine zone.1. New Phytol. 1912, 11, 37–50. [Google Scholar] [CrossRef]
- Mittal, H.; Pandey, A.; Saraswat, M.; Kumar, S.; Pal, R.; Modwel, G. A comprehensive survey of image segmentation: Clustering methods, performance parameters, and benchmark datasets. Multimed. Tools. Appl. 2022, 81, 35001–35026. [Google Scholar] [CrossRef] [PubMed]
- Taha, A.; Hanbury, A. Metrics for evaluating 3D medical image segmentation: Analysis, selection, and tool. BMC Med. Imaging 2015, 15, 29. [Google Scholar] [CrossRef]
- Bertels, J.; Eelbode, T.; Berman, M.; Vandermeulen, D.; Maes, F.; Bisschops, R.; Blaschko, M. Optimizing the Dice Score and Jaccard Index for Medical Image Segmentation: Theory & Practice. arXiv 2019, arXiv:1911.01685. [Google Scholar]
- Albi, G.; Pareschi, L.; Zanella, M. On the optimal control of opinion dynamics on evolving networks. In Proceedings of the 27th IFIP TC 7 Conference, CSMO 2015, Sophia Antipolis, France, 29 June–3 July 2015; IFIP Advances in Information and Communication, Technology. Bociu, L., Désidéri, J.A., Habbal, A., Eds.; Springer: Cham, Switzerland, 2016; Volume 494. [Google Scholar]
- Nugent, A.; Gomes, S.N.; Wolfram, M.-T. Steering opinion dynamics through control of social networks. arXiv 2024, arXiv:2404.09849. [Google Scholar] [CrossRef]
- Carrillo, J.A.; Fornasier, M.; Toscani, G.; Vecil, F. Particle, kinetic, and hydrodynamic models of swarming. In Mathematical Modeling of Collective Behavior in Socio-Economic and Life Sciences; Modeling and Simulation in Science, Engineering and Technology; Naldi, G., Pareschi, L., Toscani, G., Eds.; Birkhäuser: Basel, Switzerland, 2010. [Google Scholar]
- Piccoli, B.; Tosin, A.; Zanella, M. Model-based assessment of the impact of driver-assist vehicles using kinetic theory. Z. Angew. Math. Phys. 2020, 71, 152. [Google Scholar] [CrossRef]
- Dimarco, G.; Pareschi, L. Numerical methods for kinetic equations. Acta Numer. 2014, 23, 369–520. [Google Scholar] [CrossRef]
- Pareschi, L.; Russo, G. An Introduction to Monte Carlo Methods for the Boltzmann Equation. ESAIM Proc. 1999, 10, 35–76. [Google Scholar] [CrossRef]
- Pareschi, L.; Zanella, M. Structure preserving schemes for nonlinear Fokker-Planck equations and applications. J. Sci. Comput. 2018, 74, 1575–1600. [Google Scholar] [CrossRef]
- Van Der Walt, S.; Schönberger, J.; Nunez-Iglesias, J.; Boulogne, F.; Warner, J.; Yager, N.; Gouillart, E.; Yu, T. Scikit-image: Image processing in python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef] [PubMed]
- Bergstra, J.; Komer, B.; Eliasmith, C.; Yamins, D.; Cox, D. Hyperopt: A Python library for model selection and hyperparameter optimization. Comput. Sci. Discov. 2015, 8, 014008. [Google Scholar] [CrossRef]
- Sasaki, Y. The truth of the F-measure. Teach Tutor Mater 2007, 1, 1–5. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Square | |||
|---|---|---|---|
| 0.884 | 0.310 | 0.889 | |
| 0.351 | 0.054 | 0.047 | |
| 0.817 | 0.407 | 1.341 | |
| 0.442 | 0.081 | 0.624 | |
| Circle | |||
| 0.435 | 0.341 | 1.829 | |
| 0.013 | 0.160 | 2.717 | |
| 0.408 | 0.268 | 2.693 | |
| 0.154 | 0.228 | 2.572 | |
| Square | |||
|---|---|---|---|
| Vol. Dice | 0.884 | 0.310 | 0.889 |
| Surf. Dice | 0.884 | 0.310 | 0.889 |
| JAC | 0.442 | 0.081 | 0.624 |
| Whole Tumor | ||||
|---|---|---|---|---|
| Opt. Function | Loss | |||
| Vol. Dice | 0.4972 | 0.0888 | 2.6867 | 0.9292 |
| JAC | 0.5075 | 0.1187 | 2.3631 | 0.8672 |
| Surf. Dice | 0.6383 | 0.0579 | 2.6504 | 0.7447 |
| Core Tumor | ||||
| Opt. Function | Loss | |||
| Vol. Dice | 0.3795 | 0.1254 | 2.1808 | 0.9360 |
| JAC | 0.3823 | 0.1004 | 2.7001 | 0.8796 |
| Surf. Dice | 0.6841 | 0.0760 | 1.4155 | 0.8727 |
| Whole Tumor | |||||||
|---|---|---|---|---|---|---|---|
| FP | FN | TP | Loss | ||||
| 0.6873 | 0.1707 | 2.2395 | 134 | 347 | 3170 | 0.9559 | |
| 0.3351 | 0.1080 | 2.7051 | 134 | 350 | 3167 | 0.9470 | |
| 0.5939 | 0.2304 | 2.6718 | 134 | 350 | 3167 | 0.9373 | |
| 0.5316 | 0.1092 | 2.7105 | 136 | 349 | 3168 | 0.9179 | |
| 0.5662 | 0.1225 | 2.7043 | 136 | 349 | 3168 | 0.9032 | |
| 0.6061 | 0.2835 | 2.1243 | 136 | 349 | 3168 | 0.9013 | |
| Core Tumor | |||||||
| FP | FN | TP | Loss | ||||
| 0.6575 | 0.2725 | 0.0257 | 9 | 206 | 849 | 0.9763 | |
| 0.3989 | 0.0637 | 1.8094 | 25 | 107 | 948 | 0.9582 | |
| 0.4073 | 0.0942 | 1.6972 | 25 | 105 | 950 | 0.9460 | |
| 0.5444 | 0.2077 | 2.3545 | 25 | 105 | 950 | 0.9220 | |
| 0.5587 | 0.1742 | 2.6864 | 25 | 105 | 950 | 0.9032 | |
| 0.6137 | 0.2425 | 1.9757 | 25 | 105 | 950 | 0.9012 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cabini, R.F.; Tettamanti, H.; Zanella, M. Understanding the Impact of Evaluation Metrics in Kinetic Models for Consensus-Based Segmentation. Entropy 2025, 27, 149. https://doi.org/10.3390/e27020149
Cabini RF, Tettamanti H, Zanella M. Understanding the Impact of Evaluation Metrics in Kinetic Models for Consensus-Based Segmentation. Entropy. 2025; 27(2):149. https://doi.org/10.3390/e27020149
Chicago/Turabian StyleCabini, Raffaella Fiamma, Horacio Tettamanti, and Mattia Zanella. 2025. "Understanding the Impact of Evaluation Metrics in Kinetic Models for Consensus-Based Segmentation" Entropy 27, no. 2: 149. https://doi.org/10.3390/e27020149
APA StyleCabini, R. F., Tettamanti, H., & Zanella, M. (2025). Understanding the Impact of Evaluation Metrics in Kinetic Models for Consensus-Based Segmentation. Entropy, 27(2), 149. https://doi.org/10.3390/e27020149