
Multiscale Entropy-Based Feature Extraction for the Detection of Instability Inception in Axial Compressors

Abstract
1. Introduction
2. Description of the Established Entropy
2.1. The SampEn Algorithm
- Phase space reconstruction, the original vector X can be reconstructed in terms of the phase space vectors: with , where m is the embedding dimension.
- A similarity measure, the distance of vectors and , , is the maximum absolute difference in the scalar components . For a given tolerance r, two similar vectors and are defined as matched vector pairs if .
- Calculate SampEn, the negative natural logarithm of the empirical probability that given that , where , represents the count of matched vector pairs with .
2.2. The RCMSE Algorithm
- For a given scale factor , the original time series X is divided into non-overlapping windows of length and the data points inside each window are averaged. The kth () coarse-grained time series is defined as [35]
- The complexity of the obtained coarse-grained time series can be estimated by SampEn. The number of matched vector pairs or is computed for each scale factor and all coarse-grained time series . And then, the RCMSE is defined as
3. Main Results
3.1. Obtention of Statistical Features for Coarse-Grained Time Series
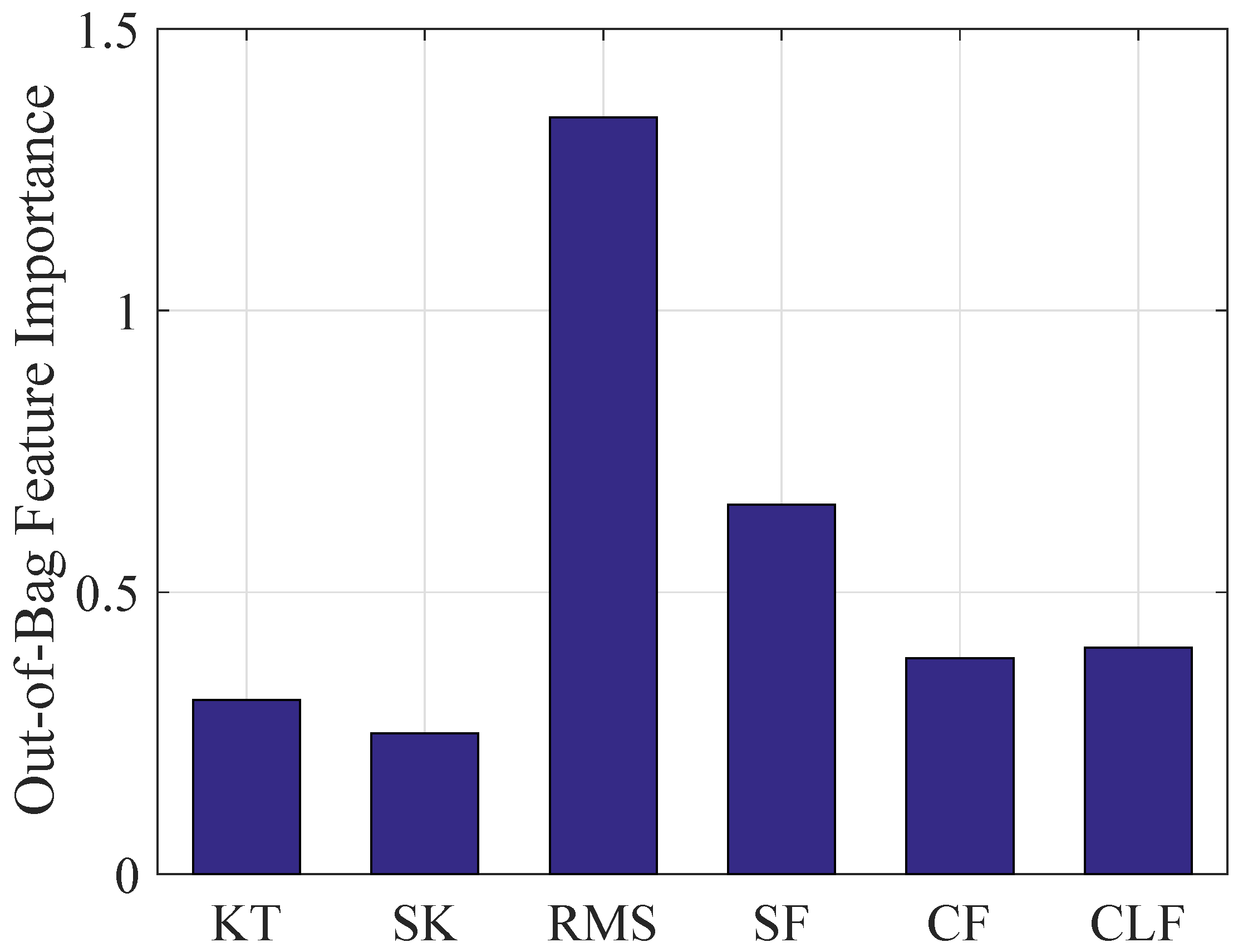
3.2. Extraction of RCSFs
- Train forest and measure OOB errors; trees in a forest can be constructed from a bootstrap sample drawn from the normalized feature set . For each tree , the prediction error on the test data known as the OOB data are recorded.
- Permute the pth feature and repeat step 1, for each tree , the prediction error on the OOB data are obtained.
- Calculate the importance of the pth feature , the importance indexes of the feature are defined bywhere denotes the number of trees in the forest, denotes the OOB error on tree t before permuting the values of , denotes the OOB error on tree t after permuting the values of .
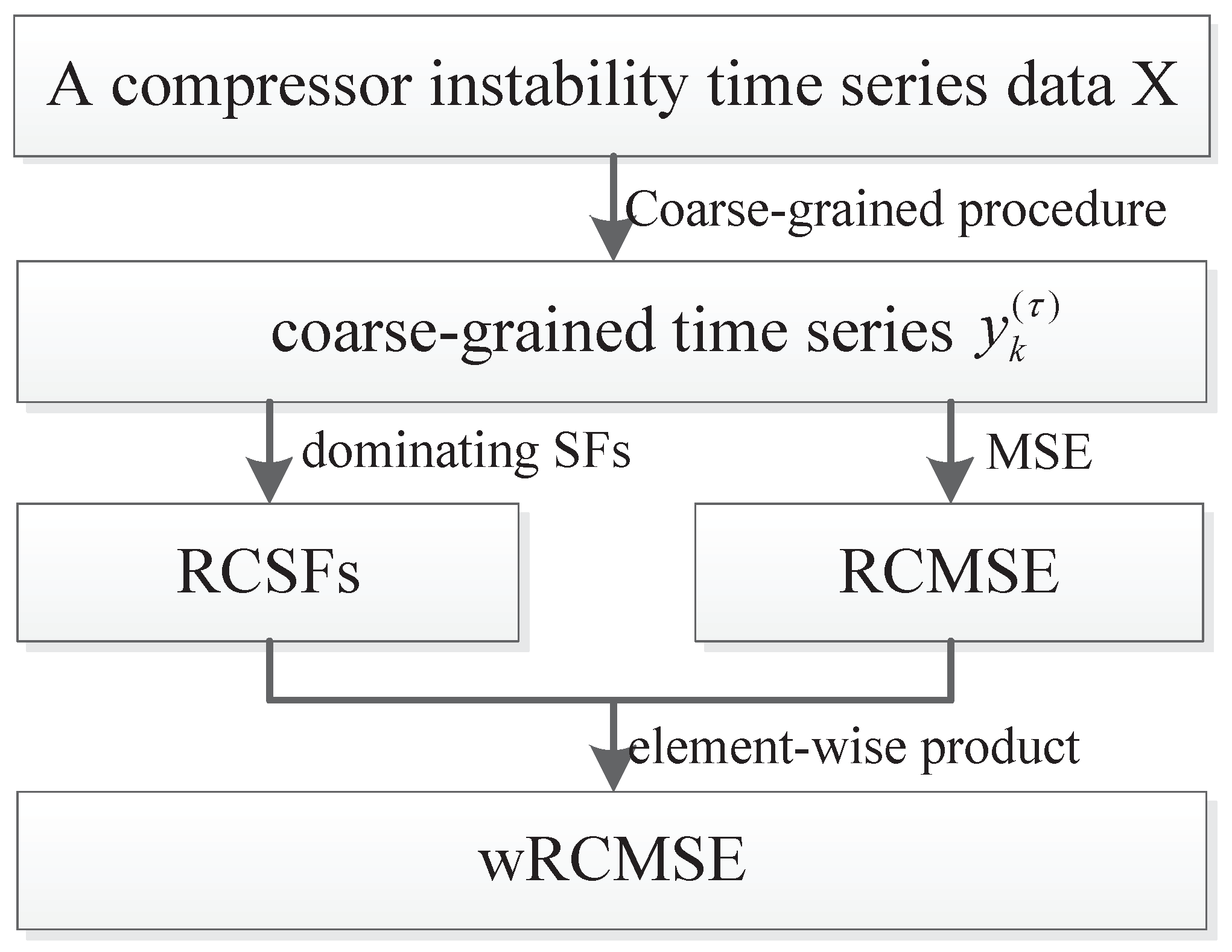
3.3. Formation of wRCMSE
| Algorithm 1 The wRCMSE algorithm for the identification of the short-time instability inception. |
| Input: The labeled instability time series, X, including the process of the compressor instability from normal to inception Output: A combined feature to distinguish the instability inception state from the health state of instability time series
|
4. Simulations
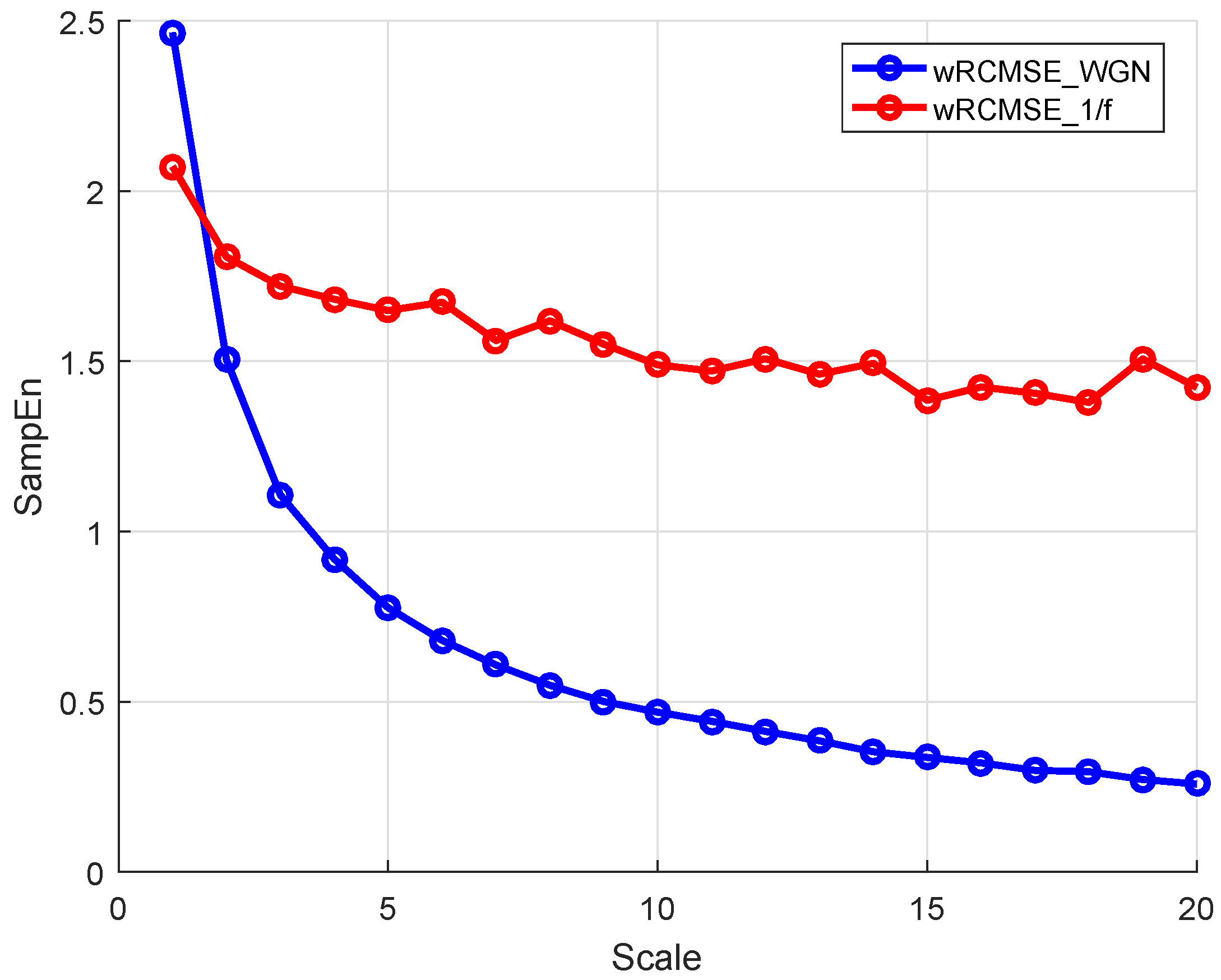
4.1. The Complexity of Two Synthetic Noise Data
4.2. The Identification of the Instability Inception
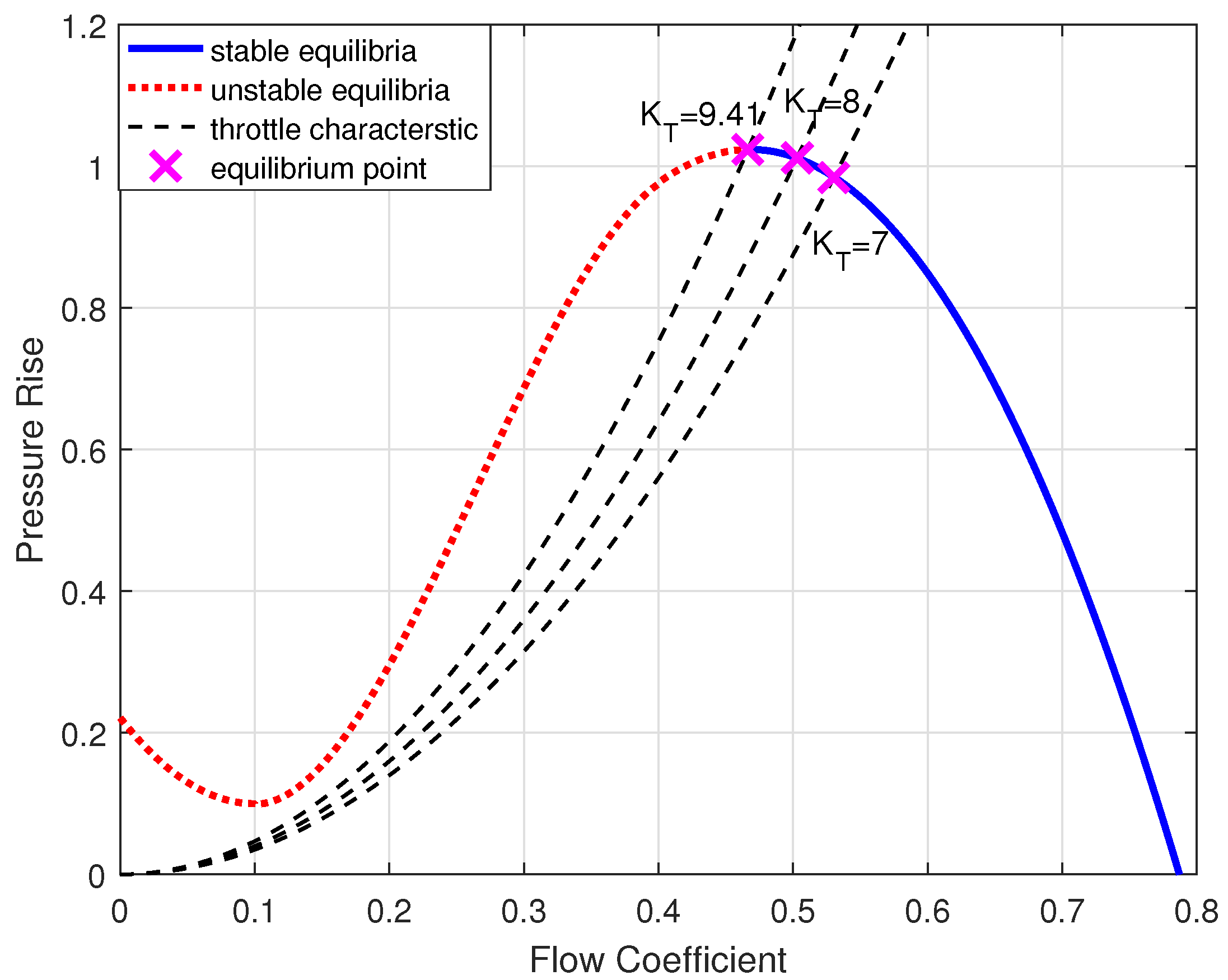
4.2.1. The Instability Data Obtained by the Mansoux Model
4.2.2. Selection of the Parameters
4.2.3. The Validity and Robusticity of wRCMSE
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MSE | Multiscale entropy |
| ApEn | Approximate entropy |
| SampEn | Sample entropy |
| RCMSE | Refined composite multiscale entropy |
| RCSFs | Refined composite statistical features |
| wRCMSE | A combination of RCSFs and RCMSE |
| RMS | Root mean square |
| HMRDE | Hierarchical multiscale reserve dispersion entropy |
References
- Gu, G.; Sparks, A.; Banda, S.S. An overview of rotating stall and surge control for axial flow compressors. IEEE Trans. Control. Syst. Technol. 1999, 7, 639–647. [Google Scholar] [CrossRef] [PubMed]
- Day, I. Stall, surge, and 75 years of research. J. Turbomach. 2016, 138, 011001. [Google Scholar] [CrossRef]
- Emmons, H.; Pearson, C.; Grant, H. Compressor surge and stall propagation. Trans. Am. Soc. Mech. Eng. 1955, 77, 455–467. [Google Scholar] [CrossRef]
- Moore, F.K.; Greitzer, E.M. A theory of post-stall transients in axial compression systems: Part I: Development of equations. J. Eng. Gas Turbines Power 1986, 108, 68–76. [Google Scholar] [CrossRef]
- McDougall, N.M.; Cumpsty, N.; Hynes, T. Stall inception in axial compressors. J. Turbomach. 1990, 112, 116–123. [Google Scholar] [CrossRef]
- Paduano, J.D.; Valavani, L.; Epstein, A.; Greitzer, E.M.; Guenette, G. Modeling for control of rotating stall. Automatica 1994, 30, 1357–1373. [Google Scholar] [CrossRef]
- Tryfonidis, M.; Etchevers, O.; Paduano, J.; Epstein, A.; Hendricks, G. Prestall behavior of several high-speed compressors. J. Turbomach. 1995, 117, 62–80. [Google Scholar] [CrossRef]
- Dremin, I.; Furletov, V.; Ivanov, O.; Nechitailo, V.; Terziev, V. Precursors of stall and surge processes in gas turbines revealed by wavelet analysis. Control Eng. Pract. 2002, 10, 599–604. [Google Scholar] [CrossRef]
- Lin, F.; Chen, J.; Li, M. Wavelet analysis of rotor-tip disturbances in an axial-flow compressor. J. Propuls. Power 2004, 20, 319–334. [Google Scholar] [CrossRef]
- Liu, L.; Li, J.; Nan, X.; Lin, F. The stall inceptions in an axial compressor with single circumferential groove casing treatment at different axial locations. Aerosp. Sci. Technol. 2016, 59, 145–154. [Google Scholar] [CrossRef]
- Tahara, N.; Kurosaki, M.; Ohta, Y.; Outa, E.; Nakajima, T.; Nakakita, T. Early Stall Warning Technique for Axial-Flow Compressors. J. Turbomach. 2007, 129, 375–384. [Google Scholar] [CrossRef]
- Cameron, J.D.; Morris, S.C. Analysis of axial compressor stall inception using unsteady casing pressure measurements. J. Turbomach. 2013, 135, 021036. [Google Scholar] [CrossRef]
- Mansoux, C.A.; Gysling, D.L.; Setiawan, J.D.; Paduano, J.D. Distributed nonlinear modeling and stability analysis of axial compressor stall and surge. In Proceedings of the American Control Conference, Baltimore, MD, USA, 29 June 29–1 July 1994. [Google Scholar]
- Paduano, J.D.; Greitzer, E.; Epstein, A. Compression system stability and active control. Annu. Rev. Fluid Mech. 2001, 33, 491–517. [Google Scholar] [CrossRef]
- Inoue, M.; Kuroumaru, M.; Iwamoto, T.; Ando, Y. Detection of a Rotating Stall Precursor in Isolated Axial Flow Compressor Rotors. J. Turbomach. 1991, 113, 281–287. [Google Scholar] [CrossRef]
- Young, A.; Day, I.; Pullan, G. Stall warning by blade pressure signature analysis. J. Turbomach. 2013, 135, 011033. [Google Scholar] [CrossRef]
- Li, F.; Li, J.; Dong, X.; Zhou, Y.; Sun, D.; Sun, X. Stall warning approach based on aeroacoustic principle. J. Propuls. Power 2016, 32, 1353–1364. [Google Scholar] [CrossRef]
- Dong, X.; Li, F.; Xu, R.; Sun, D.; Sun, X. Further investigation on acoustic stall-warning approach in compressors. J. Turbomach. 2019, 141, 061001. [Google Scholar] [CrossRef]
- Margalida, G.; Joseph, P.; Roussette, O.; Dazin, A. Comparison and sensibility analysis of warning parameters for rotating stall detection in an axial compressor. Int. J. Turbomach. Propuls. Power 2020, 5, 16. [Google Scholar] [CrossRef]
- Liu, Y.; Li, J.; Du, J.; Zhang, H.; Nie, C. Reliability analysis for stall warning methods in an axial flow compressor. Aerosp. Sci. Technol. 2021, 115, 106816. [Google Scholar] [CrossRef]
- Wu, S.D.; Wu, P.H.; Wu, C.W.; Ding, J.J.; Wang, C.C. Bearing fault diagnosis based on multiscale permutation entropy and support vector machine. Entropy 2012, 14, 1343–1356. [Google Scholar] [CrossRef]
- Pang, B.; Tang, G.; Zhou, C.; Tian, T. Rotor fault diagnosis based on characteristic frequency band energy entropy and support vector machine. Entropy 2018, 20, 932. [Google Scholar] [CrossRef] [PubMed]
- Zhang, F.; Sun, W.; Wang, H.; Xu, T. Fault diagnosis of a wind turbine gearbox based on improved variational mode algorithm and information entropy. Entropy 2021, 23, 794. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Huang, J.; Yang, X.; Luo, J.; Zhang, L.; Pang, Y. Fault diagnosis for rotating machinery using multiscale permutation entropy and convolutional neural networks. Entropy 2020, 22, 851. [Google Scholar] [CrossRef] [PubMed]
- He, D.; Liu, C.; Jin, Z.; Ma, R.; Chen, Y.; Shan, S. Fault diagnosis of flywheel bearing based on parameter optimization variational mode decomposition energy entropy and deep learning. Energy 2022, 239, 122108. [Google Scholar] [CrossRef]
- Chen, Y.; Yuan, Z.; Chen, J.; Sun, K. A novel fault diagnosis method for rolling bearing based on hierarchical refined composite multiscale fluctuation-based dispersion entropy and PSO-elm. Entropy 2022, 24, 1517. [Google Scholar] [CrossRef] [PubMed]
- Ribeiro, M.; Henriques, T.; Castro, L.; Souto, A.; Antunes, L.; Costa-Santos, C.; Teixeira, A. The entropy universe. Entropy 2021, 23, 222. [Google Scholar] [CrossRef] [PubMed]
- Xing, J.; Xu, J. An improved incipient fault diagnosis method of bearing damage based on hierarchical multi-scale reverse dispersion entropy. Entropy 2022, 24, 770. [Google Scholar] [CrossRef] [PubMed]
- Feng, X.; Zhang, G.; Yuan, X.; Fan, Y. Research on Structurally Constrained KELM Fault-Diagnosis Model Based on Frequency-Domain Fuzzy Entropy. Entropy 2023, 25, 206. [Google Scholar] [CrossRef]
- Feng, K.; Ji, J.; Ni, Q.; Beer, M. A review of vibration-based gear wear monitoring and prediction techniques. Mech. Syst. Signal Process. 2023, 182, 109605. [Google Scholar] [CrossRef]
- Minhas, A.S.; Singh, S. A new bearing fault diagnosis approach combining sensitive statistical features with improved multiscale permutation entropy method. Knowl.-Based Syst. 2021, 218, 106883. [Google Scholar] [CrossRef]
- Lou, F.; Key, N.L. Compressor Stall Warning Using Nonlinear Feature Extraction Algorithms. J. Eng. Gas Turbines Power 2020, 142, 121005. [Google Scholar] [CrossRef]
- Costa, M.; Goldberger, A.L.; Peng, C. Multiscale entropy analysis of complex physiologic time series. Phys. Rev. Lett. 2002, 89, 068102. [Google Scholar] [CrossRef] [PubMed]
- Humeau-Heurtier, A. The multiscale entropy algorithm and its variants: A review. Entropy 2015, 17, 3110–3123. [Google Scholar] [CrossRef]
- Wu, S.; Wu, C.; Lin, S.; Lee, K.; Peng, C. Analysis of complex time series using refined composite multiscale entropy. Phys. Lett. A 2014, 378, 1369–1374. [Google Scholar] [CrossRef]
- Azami, H.; Escudero, J. Coarse-graining approaches in univariate multiscale sample and dispersion entropy. Entropy 2018, 20, 138. [Google Scholar] [CrossRef] [PubMed]
- Richman, J.S.; Moorman, J.R. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [CrossRef]
- Yan, R.; Gao, R.X. Approximate entropy as a diagnostic tool for machine health monitoring. Mech. Syst. Signal Process. 2007, 21, 824–839. [Google Scholar] [CrossRef]
- Sanchez, R.V.; Lucero, P.; Vásquez, R.E.; Cerrada, M.; Macancela, J.; Cabrera, D. Feature ranking for multi-fault diagnosis of rotating machinery by using random forest and KNN. J. Intell. Fuzzy Syst. 2018, 34, 3463–3473. [Google Scholar] [CrossRef]
- Wang, X.B.; Zhang, X.; Li, Z.; Wu, J. Ensemble extreme learning machines for compound-fault diagnosis of rotating machinery. Knowl.-Based Syst. 2020, 188, 105012. [Google Scholar] [CrossRef]
- Shah, S.H.; Angel, Y.; Houborg, R.; Ali, S.; McCabe, M.F. A random forest machine learning approach for the retrieval of leaf chlorophyll content in wheat. Remote Sens. 2019, 11, 920. [Google Scholar] [CrossRef]
- Minhas, A.S.; Kankar, P.; Kumar, N.; Singh, S. Bearing fault detection and recognition methodology based on weighted multiscale entropy approach. Mech. Syst. Signal Process. 2021, 147, 107073. [Google Scholar] [CrossRef]
- Peng, L.; Cong, W.; Yong, W. A high-order model of rotating stall in axial compressors with inlet distortion. Chin. J. Aeronaut. 2017, 30, 898–906. [Google Scholar]
- Fadlallah, B.; Chen, B.; Keil, A.; Príncipe, J. Weighted-permutation entropy: A complexity measure for time series incorporating amplitude information. Phys. Rev. E 2013, 87, 022911. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m | m = 2 | m = 3 | m = 4 |
|---|---|---|---|
| Mean | 2.2426 | 2.2386 | 2.2451 |
| SD | 0.0066 | 0.0157 | 0.0381 |
| CV | 0.0029 1 | 0.007 | 0.017 |
| m | m = 2 | m = 3 | m = 4 |
|---|---|---|---|
| Mean | 1.959 | 1.966 | 1.9633 |
| STD | 0.0069 | 0.0098 | 0.0188 |
| CV | 0.0035 2 | 0.0049 | 0.0096 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, Y.; Zhao, Z.; Lin, P. Multiscale Entropy-Based Feature Extraction for the Detection of Instability Inception in Axial Compressors. Entropy 2024, 26, 48. https://doi.org/10.3390/e26010048
Fu Y, Zhao Z, Lin P. Multiscale Entropy-Based Feature Extraction for the Detection of Instability Inception in Axial Compressors. Entropy. 2024; 26(1):48. https://doi.org/10.3390/e26010048
Chicago/Turabian StyleFu, Yihan, Zheng Zhao, and Peng Lin. 2024. "Multiscale Entropy-Based Feature Extraction for the Detection of Instability Inception in Axial Compressors" Entropy 26, no. 1: 48. https://doi.org/10.3390/e26010048
APA StyleFu, Y., Zhao, Z., & Lin, P. (2024). Multiscale Entropy-Based Feature Extraction for the Detection of Instability Inception in Axial Compressors. Entropy, 26(1), 48. https://doi.org/10.3390/e26010048