
Dynamical Analysis of Hyper-ILSR Rumor Propagation Model with Saturation Incidence Rate


Abstract
1. Introduction
- (1)
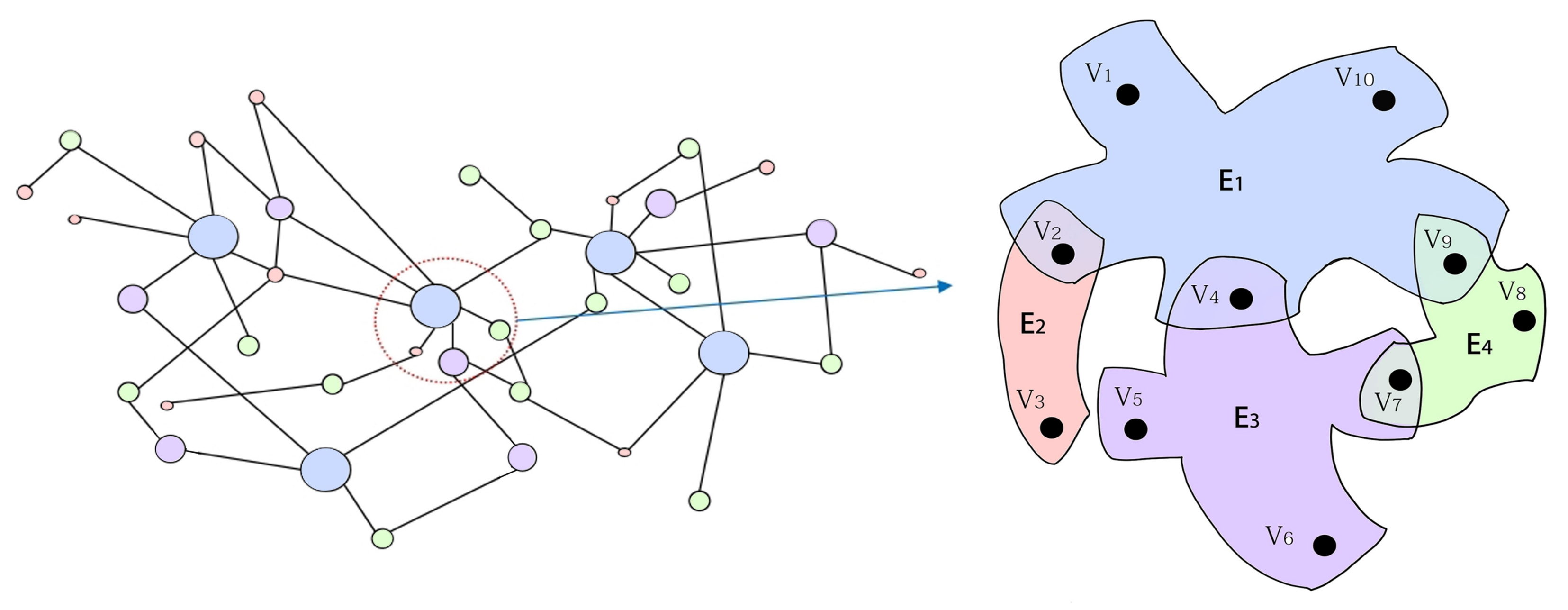
- To represent the higher-order interactions in the process of rumor-spreading, hypergraph theories are applied in the model. Individuals do not believe the rumor when they first hear it, but may believe it when they hear it from multiple individuals—this is the higher-order interaction.
- (2)
- To formulate a more reasonable rumor model, saturation incidence is used in the Hyper-ILSR model. Most models take into account only limited contact between the ignorant and the spreader. In this study, the contact saturation between the lurker and the spreader is also considered.
- (3)
- The optimal control strategy is proposed, which suppresses the propagation of rumors with the lowest cost and minimizes the number of spreaders in the network.
- (4)
- The comparisons between the Hyper-ILSR model and the ILSR model are shown in numerical simulations to confirm that the Hyper-ILSR model is more realistic than the ILSR model.
2. Preliminaries and Model Description
- 1.
- If ignorants receive the rumor from spreaders, then they become lurkers, spreaders, and recovered individuals with probability , , and , respectively.
- 2.
- After lurkers hear the rumor from spreaders, they become spreaders with probability or recovered individuals with probability .
- 3.
- A spreader knows the truth or loses interest in propagating the rumor, then stops spreading the rumor with probability .
- 4.
- After a period of time, a recovered individual will become an ignorant with probability because of forgetting the rumor.

3. Dynamical Analysis
4. Optimal Control
5. Numerical Simulations
5.1. Stability of
5.2. Stability of
5.3. Effects of Parameter A
5.4. Optimal Control
5.5. Model Application
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. The Proof of Lemma 1
Appendix B. The Proof of Theorem 1
Appendix C. The Proof of Theorem 2
Appendix D. The Proof of Theorem 3
Appendix E. The Proof of Theorem 4
References
- Liubov, B. Rumors in Human Life; B.N. Publication House: Beer-Sheva, Israel, 2021. [Google Scholar]
- Daley, J.; Kendall, G. Epidemics and rumors. Nature 1964, 204, 1118. [Google Scholar] [CrossRef] [PubMed]
- Maki, D.; Thompson, M. Mathematical Models and Applications: With Emphasis on the Social, Life, and Management Sciences; Prentice Hall: Englewood Cliffs, NJ, USA, 1973. [Google Scholar]
- Zanette, D. Critical behavior of propagation on small-world networks. Phys. Rev. E 2001, 64, 050901. [Google Scholar] [CrossRef] [PubMed]
- Moreno, Y.; Nekovee, M.; Pacheco, A. Dynamics of rumor spreading in complex networks. Phys. Rev. E 2004, 69, 066130. [Google Scholar] [CrossRef] [PubMed]
- Xia, L.; Jiang, G.; Song, B.; Song, Y. Rumor spreading model considering hesitating mechanism in complex social networks. Phys. A 2015, 437, 295–303. [Google Scholar] [CrossRef]
- Zan, Y. DSIR double-rumors spreading model in complex networks. Chaos Solitons Fractals 2018, 110, 191–202. [Google Scholar] [CrossRef]
- Zhu, L.; Yang, F.; Guan, G.; Zhang, Z. Modeling the dynamics of rumor diffusion over complex networks. Inf. Sci. 2021, 562, 240–258. [Google Scholar] [CrossRef]
- Yang, A.; Huang, X.; Cai, X.; Zhu, X. ILSR rumor spreading model with degree in complex network. Phys. A Stat. Mech. Appl. 2019, 531, 121807. [Google Scholar] [CrossRef]
- Yu, S.; Yu, Z.; Jiang, H.; Li, J. Dynamical study and event-triggered impulsive control of rumor propagation model on heterogeneous social network incorporating delay. Chaos Solitons Fractals 2021, 145, 110806. [Google Scholar] [CrossRef]
- Li, J.; Jiang, H.; Mei, X.; Hu, C.; Zhang, G. Dynamical analysis of rumor spreading model in multi-lingual environment and heterogeneous complex networks. Inf. Sci. 2020, 536, 391–408. [Google Scholar] [CrossRef]
- Yang, S.; Jiang, H.; Hu, C. Dynamics of the rumor-spreading model with hesitation mechanism in heterogeneous networks and bilingual environment. Adv. Differ. Equ. 2020, 2020, 628. [Google Scholar] [CrossRef]
- Tong, X.; Jiang, H.; Chen, X.; Yu, S.; Li, J. Dynamic analysis and optimal control of rumor spreading model with recurrence and individual behaviors in heterogeneous networks. Entropy 2022, 24, 464. [Google Scholar] [CrossRef] [PubMed]
- Capasso, V.; Serio, G. A generalization of the Kermack-McKendrick deterministic epidemic model. Math. Biosci. 1978, 42, 43–61. [Google Scholar] [CrossRef]
- Zhang, T.; Teng, Z. Global asymptotic stability of a delayed SEIRS epidemic model with saturation incidence. Chaos Solitons Fractals 2008, 37, 1456–1468. [Google Scholar] [CrossRef]
- Xu, R.; Ma, Z. Global stability of a delayed SEIRS epidemic model with saturation incidence rate. Nonlinear Dyn. 2010, 61, 229–239. [Google Scholar] [CrossRef]
- Parsamanesh, M.; Erfanian, M. Stability and bifurcations in a discrete-time SIVS model with saturated incidence rate. Chaos Solitons Fractals 2021, 150, 111178. [Google Scholar] [CrossRef]
- Guan, G.; Guo, Z. Bifurcation and stability of a delayed SIS epidemic model with saturated incidence and treatment rates in heterogeneous networks. Appl. Math. Model. 2022, 101, 55–75. [Google Scholar] [CrossRef]
- Chen, S.; Jiang, H.; Li, L.; Li, J. Dynamical behaviors and optimal control of rumor propagation model with saturation incidence on heterogeneous networks. Chaos Solitons Fractals 2020, 140, 110206. [Google Scholar] [CrossRef]
- Yue, X.; Huo, L. Analysis of the stability and optimal control strategy for an ISCR rumor propagation model with saturated incidence and time delay on a scale-free network. Mathematics 2022, 10, 3900. [Google Scholar] [CrossRef]
- Jiang, X.; Wang, Z.; Liu, W. Information dissemination in dynamic hypernetwork. Phys. A 2019, 532, 121578. [Google Scholar] [CrossRef]
- Grilli, J.; Barabás, G.; Michalska-Smith, M.; Allesina, S. Higher-order interactions stabilize dynamics in competitive network models. Nature 2017, 548, 210–213. [Google Scholar] [CrossRef]
- Li, W.; Xue, X.; Pan, L.; Lin, T.; Wang, W. Competing spreading dynamics in simplicial complex. Appl. Math. Comput. 2022, 412, 126595. [Google Scholar] [CrossRef]
- Schaub, M.; Benson, A.; Horn, P.; Lippner, G.; Jadbabaie, A. Random walks on simplicial complexes and the normalized hodge 1-Laplacian. SIAM Rev. 2020, 62, 353–391. [Google Scholar] [CrossRef]
- Iacopini, I.; Petri, G.; Barrat, A.; Latora, V. Simplicial models of social contagion. Nat. Commun. 2019, 10, 2485. [Google Scholar] [CrossRef] [PubMed]
- Lucas, M.; Cencetti, G.; Battiston, F. A multi-order Laplacian for synchronization in higher-order networks. Phys. Rev. Res. 2020, 2, 033410. [Google Scholar] [CrossRef]
- Gambuzza, L.; Patti, F.; Gallo, L.; Lepri, S.; Romance, M.; Criado, R.; Frasca, M.; Latora, V.; Boc-caletti, S. Stability of synchronization in simplicial complexes. Nat. Commun. 2021, 12, 1255. [Google Scholar] [CrossRef]
- De-Arruda, G.; Petri, G.; Moreno, Y. Social contagion models on hypergraphs. Phys. Rev. Res. 2020, 2, 023032. [Google Scholar] [CrossRef]
- Alvarez-Rodriguez, U.; Battiston, F.; Arruda, G. Evolutionary dynamics of higher-order interactions in social networks. Nat. Hum. Behav. 2021, 5, 586–595. [Google Scholar] [CrossRef]
- Landry, N.; Restrepo, J. The effect of heterogeneity on hypergraph contagion models. Chaos 2020, 30, 103117. [Google Scholar] [CrossRef]
- Zhang, Z.; Mei, X.; Jiang, H.; Luo, X.; Xia, Y. Dynamical analysis of Hyper-SIR rumor spreading model. Appl. Math. Comput. 2023, 446, 127887. [Google Scholar] [CrossRef]
- Lenhart, S.; Workman, J. Optimal Control Applied to Biological Models; CRC Press: Boca Raton, FL, USA, 2007. [Google Scholar]
- Fleming, W.; Rishel, R. Deterministic and Stochastic Optimal Control; Springer: New York, NY, USA, 1975. [Google Scholar]
- Yu, S.; Yu, Z.; Jiang, H.; Yang, S. The dynamics and control of 2I2SR rumor spreading models in multilingual online social networks. Inf. Sci. 2021, 581, 18–41. [Google Scholar] [CrossRef]
- LaSalle, J. The Stability of Dynamical Systems; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1976. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | 1 h | 2 h | 3 h | 4 h | 5 h | 6 h | 7 h | 8 h | 9 h | 10 h | 11 h |
| Reprints | 85 | 89 | 1117 | 902 | 220 | 1914 | 1050 | 919 | 299 | 92 | 20 |
| Time | 12 h | 13 h | 14 h | 15 h | 16 h | 17 h | 18 h | 19 h | 20 h | 21 h | 22 h |
| Reprints | 346 | 40 | 562 | 381 | 214 | 182 | 83 | 13 | 31 | 6 | 294 |
| Time | 23 h | 24 h | 25 h | 26 h | 27 h | 28 h | 29 h | 30 h | 31 h | 32 h | 33 h |
| Reprints | 57 | 176 | 226 | 44 | 34 | 79 | 39 | 50 | 119 | 4 | 20 |
| Time | 34 h | 35 h | 36 h | 37 h | 38 h | 39 h | 40 h | 41 h | 42 h | 43 h | 44 h |
| Reprints | 48 | 86 | 3 | 13 | 30 | 2 | 2 | 22 | 0 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mei, X.; Zhang, Z.; Jiang, H. Dynamical Analysis of Hyper-ILSR Rumor Propagation Model with Saturation Incidence Rate. Entropy 2023, 25, 805. https://doi.org/10.3390/e25050805
Mei X, Zhang Z, Jiang H. Dynamical Analysis of Hyper-ILSR Rumor Propagation Model with Saturation Incidence Rate. Entropy. 2023; 25(5):805. https://doi.org/10.3390/e25050805
Chicago/Turabian StyleMei, Xuehui, Ziyu Zhang, and Haijun Jiang. 2023. "Dynamical Analysis of Hyper-ILSR Rumor Propagation Model with Saturation Incidence Rate" Entropy 25, no. 5: 805. https://doi.org/10.3390/e25050805
APA StyleMei, X., Zhang, Z., & Jiang, H. (2023). Dynamical Analysis of Hyper-ILSR Rumor Propagation Model with Saturation Incidence Rate. Entropy, 25(5), 805. https://doi.org/10.3390/e25050805