Abstract
An alternate measure of uncertainty, termed the fractional generalized cumulative residual entropy, has been introduced in the literature. In this paper, we first investigate some variability properties this measure has and then establish its connection to other dispersion measures. Moreover, we prove under sufficient conditions that this measure preserves the location-independent riskier order. We then elaborate on the fractional survival functional entropy of coherent and mixed systems’ lifetime in the case that the component lifetimes are dependent and they have identical distributions. Finally, we give some bounds and illustrate the usefulness of the given bounds.
1. Introduction
The Shannon entropy is used in various scientific disciplines such as physics, chemistry, information theory, financial analysis, communications, engineering, and statistics, among others. The Shannon entropy is defined as where “log” denotes the natural logarithm, so that and is the probability density function (PDF) of an absolutely continuous non-negative random variable (RV) It is well known that when the differential Shannon entropy considers a continuous complement of that for the discrete RVs, it presents various deficiencies. Researchers have found several methods to create surrogate measures of information. Rao et al. [1] defined the cumulative residual entropy (CRE) by
where
is the cumulative hazard function and stands for the hazard rate function. Applications and the corresponding results of this function can be found in [2,3,4,5,6].
Di Crescenzo et al. [7] introduced the fractional generalized cumulative residual entropy (FGCRE) of X as a generalization of CRE defined by
for all We remark that if is a positive integer, it can easily be seen that (3) becomes the measure of the generalized CRE established by Psarrakos and Navarro [8]. The GCRE is a quantity related to a non-homogeneous Poisson process and the distributions of the upper record values of a sequence of observations (see, e.g., [9]). The present paper establishes some properties of for coherent and mixed systems with lifetime T in situations where the component lifetimes are affected by each other and, furthermore, they are identically distributed. We recall that related results about the FCRE (as a special case of the FGCRE) can be seen in Alomani and Kayid [10], Kayid and Shrahili [11], and Xiong et al. [12]. The main theoretical properties of this paper are associated with the general properties of the FGCRE, which allows suitably extending the CRE function. Since the properties of this measure are similar to the CRE, thus, for an essential application of this measure, see the contribution given by Rao et al. [1], Toomaj et al. [6], and Toomaj and Atabay [13] and the references therein.
The rest of the paper is arranged as follows. Section 2 first establishes some basic properties of the FGCRE and then provides sufficient conditions by which it preserves the location-independent riskier order. In Section 3, we study the general properties of the FGCRE of coherent and mixed systems, where we assume that the component lifetimes are dependent and identically distributed, having a common distribution function. In the remainder, some bounds for the FGCRE of the systems’ lifetime are also obtained.
We shall denote by the set of absolutely continuous non-negative RVs having the support
2. General Properties of FGCRE
It is worth pointing out that (3) is always non-negative, and it is suitable to measure either for the continuous or discrete distributions, while the Shannon entropy can be negative when the RV is absolutely continuous. Moreover, it is clear that for a degenerate distribution function for which (a.s.), we have that is the FGCRE has a standardization property. On the other hand, it has location invariance and the positive homogeneity property, that is for all and The amount of the FGCRE is preserved under dispersion. This is an indication that the fractional survival functional entropy is a measure of variability, as given in Bickel and Lehmann [14]. Generally, the variance and standard deviation are commonly used measures of risk. We provide a bound for the FGCRE based on the standard deviation of an RV with PDF
for all where is defined in (2).
Theorem 1.
Let with the survival function and standard deviation for all . Then, under the condition that the expectation exists, we have
for all .
Proof.
From Corollary 1 of Alomani and Kayid [10], the FGCRE can be written based on the following covariance representation:
Using the Cauchy–Schwartz inequality for (5), we obtain
where the last equality is due to because has a gamma distribution with the shape parameter and scale parameter one. Therefore, this completes the proof. □
Another useful connection is between the FGCRE and the generalized Gini mean difference, defined by
Specially, when , we have the well-known Gini mean difference as
Therefore, from Theorem 3 of Alomani and Kayid [10], we have for all Let be the quantile function of S. If , one can write the FGCRE as
where
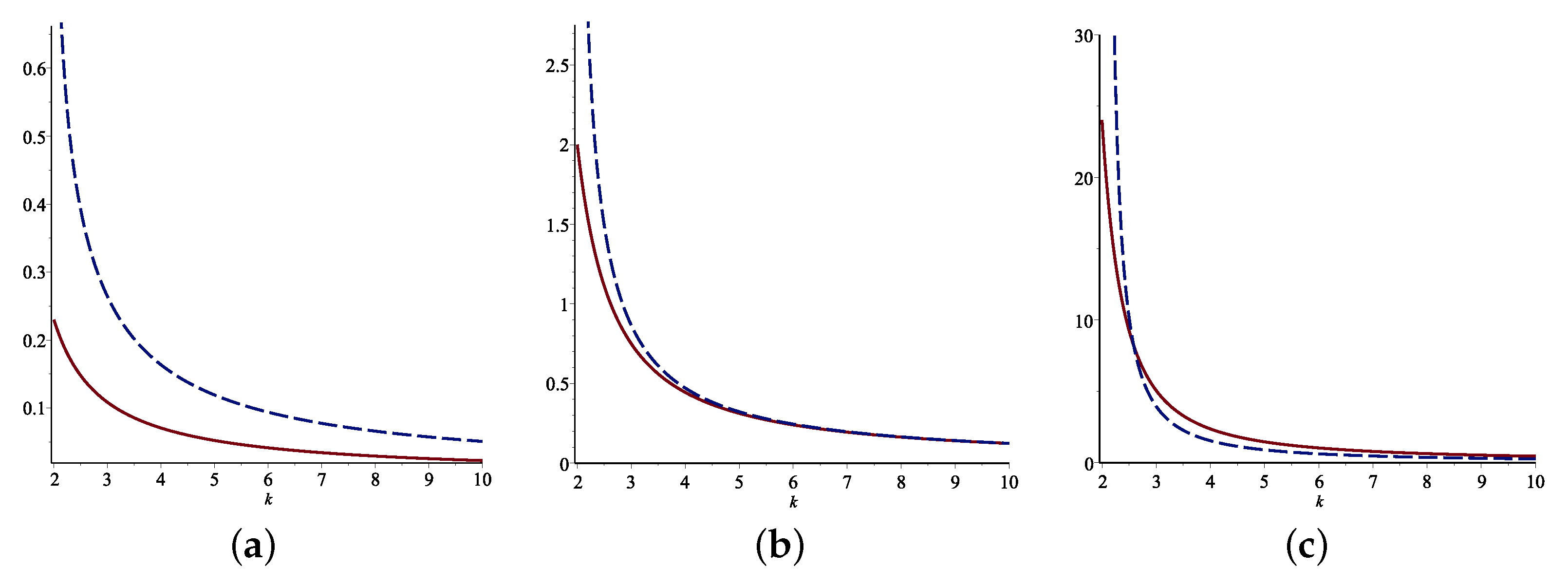
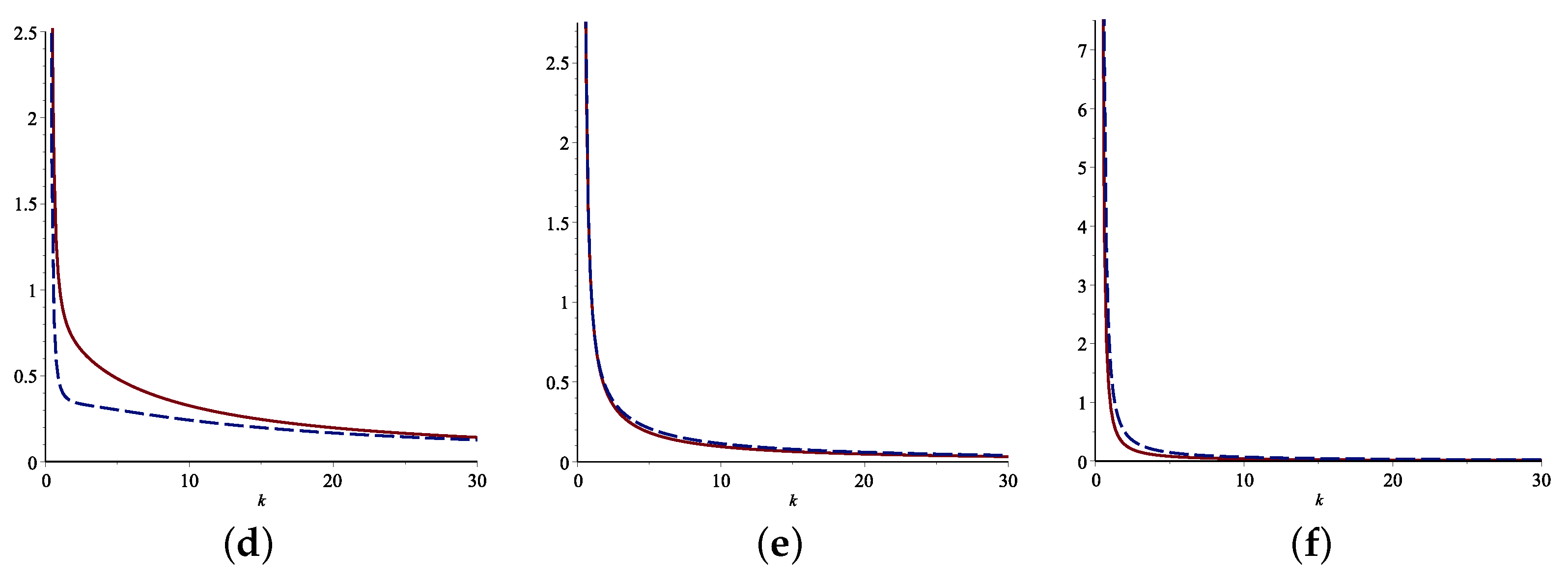
where Some examples of the FGCRE and the standard deviation of are given in Table 1. The FGCRE and the standard deviation are compared with respect to k for various values of for some distributions. They are shown in Figure 1. Based on these graphs, the relationship that the FGCRE has with the standard deviation of is detected.

Table 1.
The FGCRE and the standard deviation of statistical models.
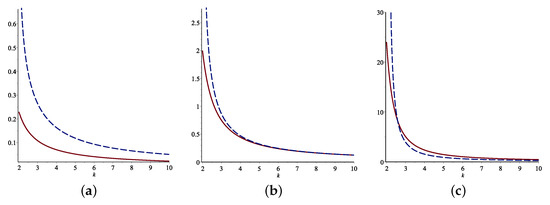
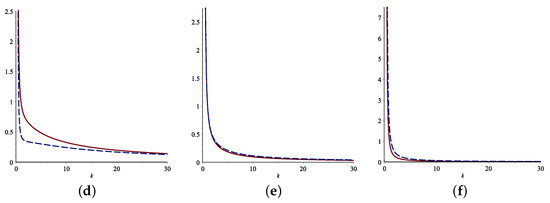
Figure 1.
Comparisons of the standard deviation (blue line) and FGCRE (red line) for the Pareto (top) and Weibull (bottom) models for various values of when . (a) ; (b) ; (c) ; (d) ; (e) ; (f) .
Here, we establish that the fractional generalized cumulative residual entropy preserves the well-known dispersive and location-independent riskier order. First, we recall the mentioned notions.
Definition 1.
Let and with the CDFs and and the survival functions and respectively. Then, we say that:
- 1.
- is smaller than in the dispersive order (denoted by ) if .
- 2.
- is smaller than in the location-independent riskier order (denoted by ) if
We remark that if and are absolutely continuous with PDFs and , respectively, then is equivalent to
It is clear that gives due to (6). Since is a sufficient condition for one can define the following order.
Definition 2.
Let We say that is said to be smaller than in the fractional generalized cumulative residual entropy order (denoted by ) if for all
We should note that if then it does not necessarily mean that and are identically distributed. For a strictly increasing function let us consider Then, recalling Relation (14) of Kayid and Shrahili [11], one can write
for all Therefore, if , then , which is similar to Theorem 1 of Ebrahimi et al. [15]. The integrated distribution function of H for every RV Z with CDF H is defined by
It was proven by Landsberger and Meilijson (1994) that
We now state and prove that is a necessary condition for the location-independent riskier order
Theorem 2.
Let with the DFs and and survival functions and respectively. If then for all
3. Application to Coherent and Mixed Systems
In this section, we establish some coherent and mixed systems’ properties. The k-out-of-n system is a coherent system where the system fails when the k-th component failure occurs. A stochastic mixture of coherent systems is termed the mixed system (see, e.g., Samaniego [16]). If T stands for the mixed system’s lifetime with n independent and identically distributed (iid) component lifetimes having absolutely continuous CDF the survival or reliability function of the mixed system is
where for are the reliability functions of . In the literature, the vector of coefficients p = in is denominated as the system signature, where It should be noted that the elements are non-negative real numbers between , where the parent CDF F plays no role and the identity holds.
Here, we first give an expression for the FGCRE of a mixed system with the system signature consisting of n iid component lifetimes with CDF F and PDF It is well known that the probability integral transformation is uniformly distributed in Thus, the CDF of is
for . Therefore, the CDF of the probability integral transformation is
Recalling (1) and the earlier stated transforms, we have and
where for all
It was proven by Navarro et al. [17] that with dependent and identically distributed (did) component lifetimes can be written as
where h is a distortion function in the sense that it is an increasing continuous function in such that and and S is the common baseline reliability function of the components. We remark that in the distortion function the CDF plays no role, and it only depends on the structure function and on the copula of the random vector In particular, if the component lifetimes are exchangeable (i.e., every permutation of the vector has the same joint distribution), then
where with and and J is the exchangeable survival copula of The coefficients in (18) are the minimal signature the system has. Specially, if the component lifetimes are iid, then (see, e.g., [3])
Therefore, the representation (16) can be generalized to the mixed systems with did components; hence, from (17), one can write
for all As an application of Equations (16) and (20), consider the following example.
Example 1.
Consider a coherent system with lifetime consisting of iid components with for and . The signature is , and its minimal signature isa= It is clear that ; thus, we have
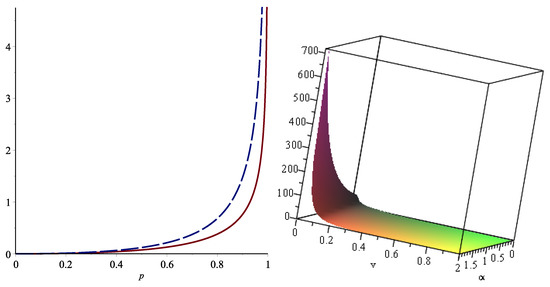
for all Clearly, it can be seen that the FGCRE is increasing with respect to λ in the sense that the variability of the system’s lifetime increases with increasing the parameter λ; however, it is decreasing with respect to the parameter α, as shown in Figure 2 (left panel). Now, suppose the component lifetimes share the Farlie–Gumbel–Morgenstern copula as
for The reliability function of the system is where . Consider the case when the components are exponential. Then, the FGCRE is
Figure 2.
The plot of with iid (left panel) and did (right panel) with respect to in Example 1.
It is hard to obtain a closed-form expression for , and so, we compute it numerically. One can see in Figure 2 (right panel) that decreases when the dependence parameter β changes in for all values of
We recall that the minimal signatures of the systems with 1–5 components were computed in [3], and so, one can compute the values of numerically for all For instance, for various values of we give the FGCRE of these systems with 1–4 iid exponential components in Table 2. The values of and the respective standard deviations of for some values of are given in Table 2. An interesting result is to compare the FGCRE of two mixed systems with the same structure having did component lifetimes by using Equation (20), which is stated in the next theorem.
Table 2.
Comparisons of the FGCRE and standard deviation of for some values of and for the coherent systems having 1–4 iid components from the common standard exponential distribution.
Theorem 3.
for , , then .
Let us assume that and are the lifetimes of two mixed systems having the same structure consisting of n did component lifetimes with the same copula and DFs and and PDFs and respectively:
- (i)
- If , then .
- (ii)
- If and for all ,
Proof.
(i) The structure function of the systems is the same, and also, they have the same copula. This implies that they have the same distortion function h. On the other hand, from assumption and, hence, from (7), it holds that
for all where for all Hence, Expression (20) completes the proof. Part (ii) can be proven in a similar manner as Theorem 1 of [6], and hence, we omit it. □
Due to the assumptions of the above theorem and since h is strictly increasing in it was proven in [17] that coincides with . Moreover, when the component lifetimes are iid, because of the polynomial property, then h is always strictly increasing in , and so, this equivalence holds.
Example 2.
Assume a coherent system with lifetime where are iid from the CDF:
and let be another coherent system with the iid component lifetimes having the common CDF:
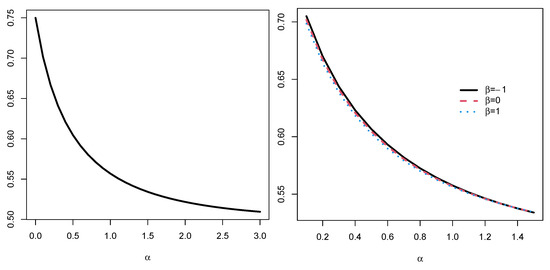
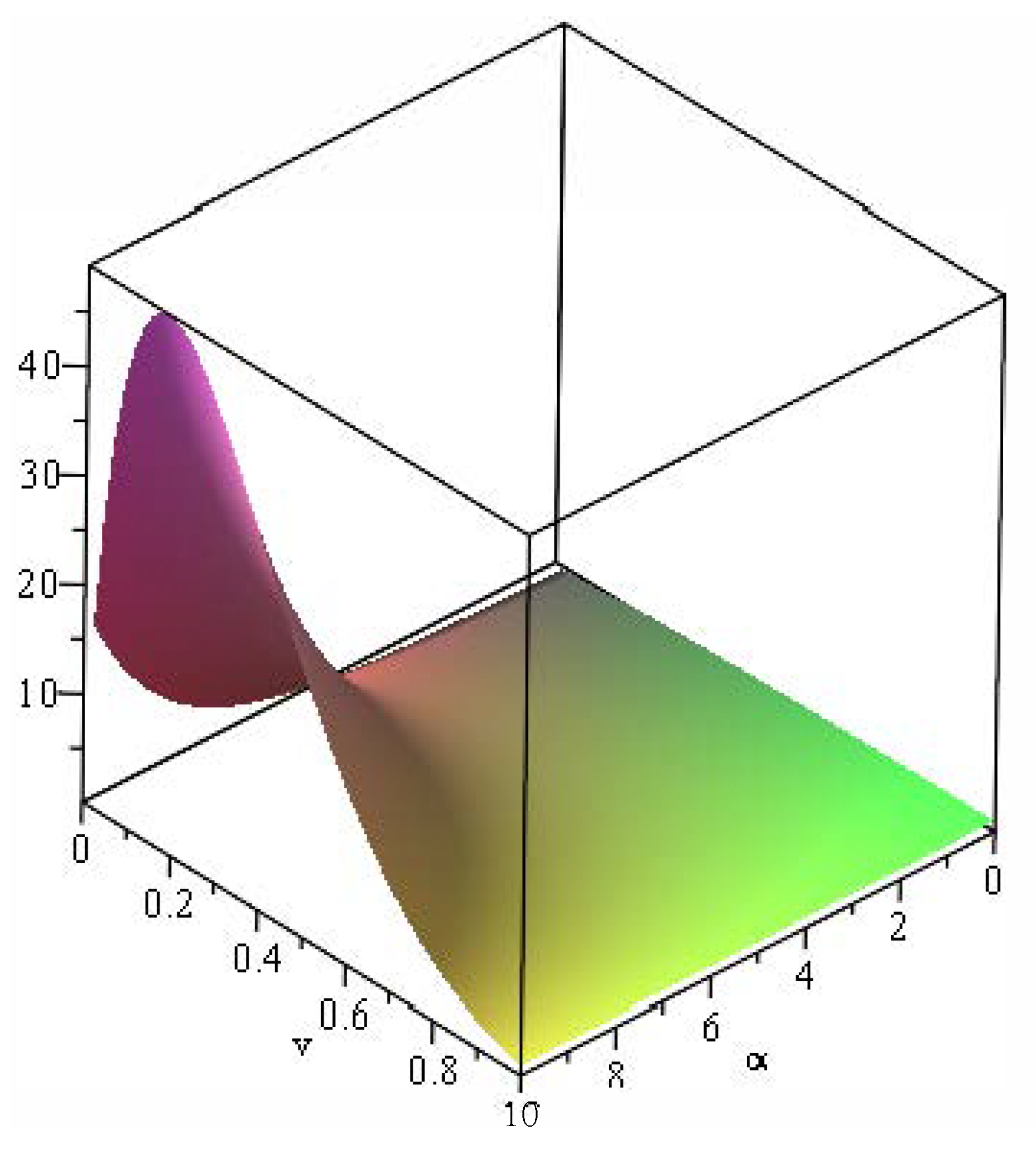
The minimal signature of the system is . The FGCREs of these lifetimes are and respectively. Thus, we obtain . Moreover, it can be seen that and Since
and due to Figure 3, one can obtain
for all and Thus, Part (ii) of Theorem 3 yields .
Figure 3.
The plot of function with respect to and v in Example 2.
The preservation of mixed systems under the location-independent riskier order is established for lifetimes of coherent and mixed systems under some conditions on the distortion functions in the next theorem.
Theorem 4.
Under the assumption of Theorem 3, if and
is decreasing in x for all then .
Proof.
As an application of the above theorem, consider the next example.
Example 3.
Let be the lifetime a coherent system has, where are the lifetimes of its components, with CDF
In this case, we have , and thus, we obtain
Moreover, let be the lifetime of the coherent system with component lifetimes , which are iid, and the common CDF
where and so, we obtain
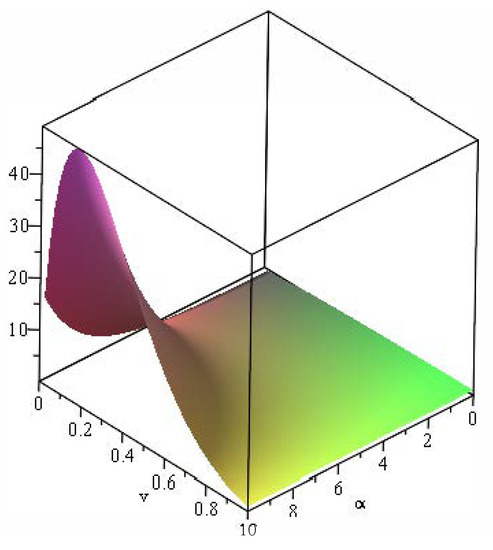
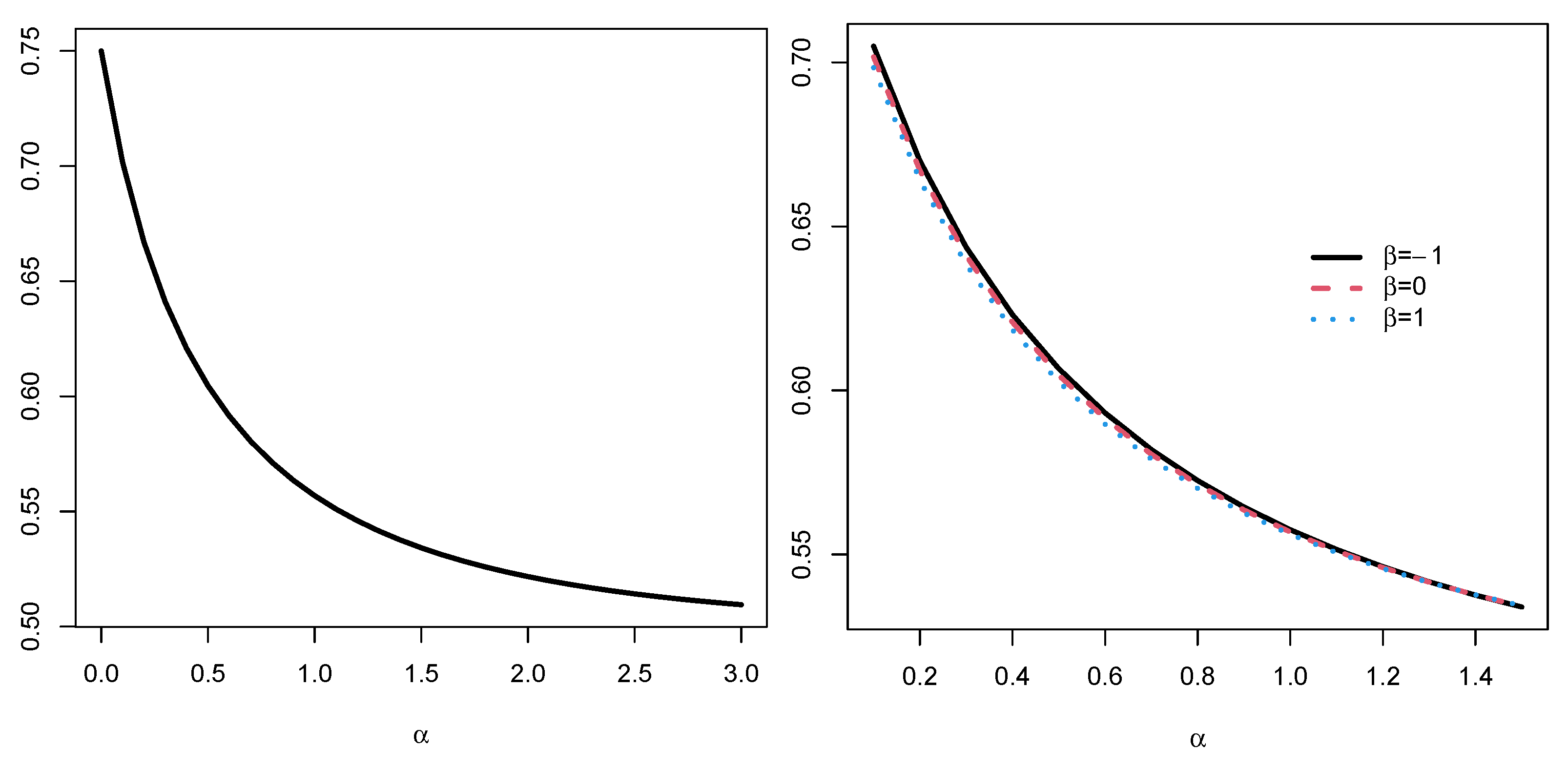
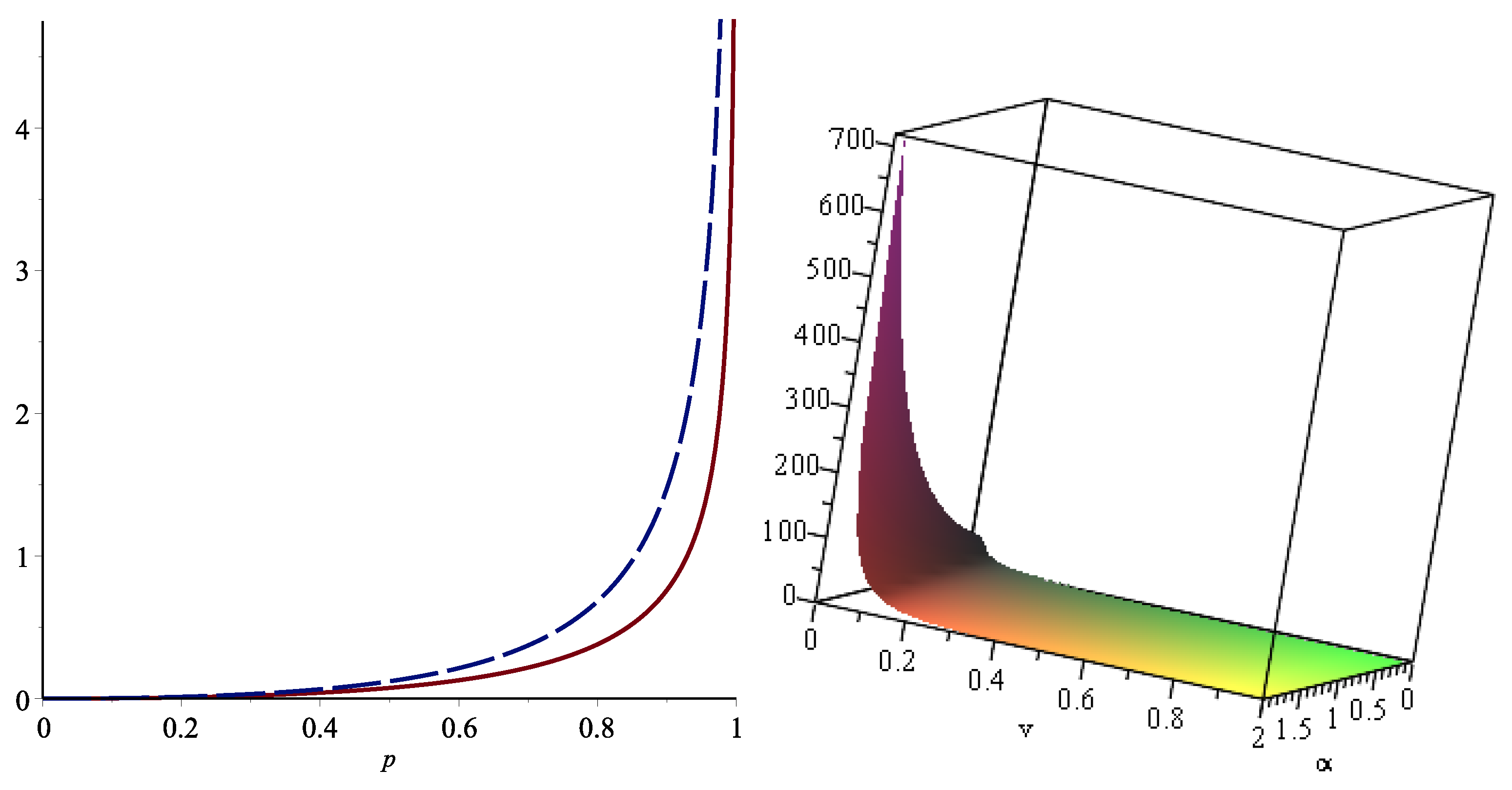
Moreover, the minimal signature of the system is . In Figure 4, we plot the functions (solid line) and (dashed line), where one can see that for all ; thus, this results in Since the function (24) is decreasing in this case (right panel), Theorem 4 yields .
Figure 4.
The plot (solid line) and (dashed line) in the left panel and the function (24) with respect to and v in the right panel in Example 3.
FGCRE of the Systems and Bounds
Hereafter, using the results obtained in the previous section, we obtain some bounds for the FGCRE of mixed systems. We point out that, in general, it is difficult or, in some cases, impossible to evaluate the FGCRE of the system’s lifetime when the system has a complicated structure function or its components are large. Therefore, it is very useful to provide bounds for the FGCRE of the system’s lifetime to approximate its behavior. In the next theorem, we first provide bounds for the FGCRE of the system on the basis of the common FGCRE of the components and then obtain the bounds in terms of the bounded PDF and the underlying distortion function.
Theorem 5.
Let T represent the lifetime a mixed system has with i.d. component lifetimes , and let h be the associated distortion function:
- (a)
- If we denote , , andthen for all .
- (b)
- If and , where D is the support of f, thenwhere and .
Proof.
(a) The upper bound can be obtained from (20) as follows:
In a similar manner, one can obtain the lower bound.
(b) By noting that , from (16), we have
Similarly, the upper bound can be derived. □
It is worth pointing out that can be written as follows:
We remark that denotes the system’s lifetime with the same distortion function of T and the same reliability copula J consisting of n did component lifetimes, which is uniformly distributed in . Therefore, one can write such that . depends only on the system structure and reliability copula. Moreover, it depends only on the system signature when the component lifetimes are iid. It is evident that for there is no upper bound, and if then there is no lower bound.
Example 4.
Recalling Example 1, let us assume that the components of the system are iid having a reliability function:
as shown in Table 1. In this case, and . Therefore, where
For example, for some values of we have where is decreasing in Moreover, Part (a) of Theorem 5 gives the upper bound as for all α whenever .
In the next corollary, we show that the lower bound in Part (b) of Theorem 5 for every coherent system where the lifetimes of its components are iid, and this does not remain valid for mixed systems. To this aim, if is the signature vector of a mixed system, then it is easy to see that and , which means that this is not true for all
Corollary 1.
In Part (b) of Theorem 5, the lower bound is zero for all the mixed systems with iid components and signature satisfying or . Specifically, it is zero for all the coherent systems with iid components.
Proof.
The proof is analogous to the proof of Proposition 3 of [6]. □
At the end of this section, under sufficient conditions on the mean residual lifetime (MRL) function of the common CDF, we establish bounds for the FGCRE. If denotes the life length of a system with age then the mean residual life (MRL) function of X is
Now, we state the following theorem.
Theorem 6.
Under the conditions of Theorem 5, it holds that:
- (a)
- If X is the DMRL andthen for all
- (b)
- If X is the IMRL andthen for all
Proof.
(a) We just prove Case (a); Case (b) can be obtained similarly. From the assumption that X is the DMRL and the condition (29) holds, then T is the DMRL due to Theorem 2.1 of Navarro [18]. Now, the proof is easily obtained from Theorem 7 of Kayid and Shrahili [11] as follows:
and this completes the proof. □
The above theorem can be applied as follows:
Example 5.
Assume the coherent system with a lifetime:
consisting of iid component lifetimes having the common exponential distribution, which is both the IMRL and the DMRL. The minimal signature isa= , and hence, its reliability function is , where Navarro [18] showed that
for all Therefore, T is the DMRL, and so, Theorem 6 implies that for all
Author Contributions
Conceptualization, G.A.; methodology, M.K.; software, G.A.; validation, M.K.; formal analysis, G.A.; investigation, G.A.; resources, M.K.; data curation, G.A.; writing—original draft preparation, G.A.; writing—review and editing, M.K.; visualization, G.A.; supervision, M.K.; project administration, G..; funding acquisition, G.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Princess Nourah bint Abdulrahman University Researchers Supporting Project Number (PNURSP2022R226), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors are grateful to the three anonymous Reviewers for their comments and suggestions, which led to this improved version of the paper. The authors extend their sincere appreciation to Princess Nourah bint Abdulrahman University Researchers Supporting Project Number (PNURSP2022R226), Princess Nourah bint Abdulrahman University, Riyadh, Saudi Arabia.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| RV(s) | Random variable(s) |
| CDF | Cumulative distribution function |
| Probability density function | |
| CRE | Cumulative residual entropy |
| FGCRE | Fractional generalized cumulative residual entropy |
| iid | Independent and identically distributed |
| did | Dependent and identically distributed |
| MRL | Mean residual lifetime |
| DMRL | Increasing mean residual lifetime |
| IMRL | Decreasing mean residual lifetime |
References
- Rao, M.; Chen, Y.; Vemuri, B.C.; Wang, F. Cumulative residual entropy: A new measure of information. IEEE Trans. Inf. Theory 2004, 50, 1220–1228. [Google Scholar] [CrossRef]
- Asadi, M.; Zohrevand, Y. On the dynamic cumulative residual entropy. J. Stat. Plan. Inference 2007, 137, 1931–1941. [Google Scholar] [CrossRef]
- Navarro, J.; del Aguila, Y.; Asadi, M. Some new results on the cumulative residual entropy. J. Stat. Plan. Inference 2010, 140, 310–322. [Google Scholar] [CrossRef]
- Baratpour, S. Characterizations based on cumulative residual entropy of first-order statistics. Commun. Stat. Theory Methods 2010, 39, 3645–3651. [Google Scholar] [CrossRef]
- Baratpour, S.; Rad, A.H. Testing goodness-of-fit for exponential distribution based on cumulative residual entropy. Commun. Stat. Theory Methods 2012, 41, 1387–1396. [Google Scholar] [CrossRef]
- Toomaj, A.; Sunoj, S.M.; Navarro, J. Some properties of the cumulative residual entropy of coherent and mixed systems. J. Appl. Probab. 2017, 54, 379–393. [Google Scholar] [CrossRef]
- Di Crescenzo, A.; Kayal, S.; Meoli, A. Fractional generalized cumulative entropy and its dynamic version. Commun. Nonlinear Sci. Numer. Simul. 2021, 102, 105899. [Google Scholar] [CrossRef]
- Psarrakos, G.; Economou, P. On the generalized cumulative residual entropy weighted distributions. Commun. Stat. Theory Methods 2017, 46, 10914–10925. [Google Scholar] [CrossRef]
- Toomaj, A.; Di Crescenzo, A. Connections between weighted generalized cumulative residual entropy and variance. Mathematics 2020, 8, 1072. [Google Scholar] [CrossRef]
- Alomani, G.; Kayid, M. Stochastic properties of fractional generalized cumulative residual entropy and its extensions. Entropy 2022, 24, 1041. [Google Scholar] [CrossRef] [PubMed]
- Kayid, M.; Shrahili, M. Some further results on the fractional cumulative entropy. Entropy 2022, 24, 1037. [Google Scholar] [CrossRef] [PubMed]
- Xiong, H.; Shang, P.; Zhang, Y. Fractional cumulative residual entropy. Commun. Nonlinear Sci. Numer. Simul. 2019, 78, 104879. [Google Scholar] [CrossRef]
- Toomaj, A.; Atabay, H.A. Some new findings on the cumulative residual tsallis entropy. J. Comput. Appl. Math. 2022, 400, 113669. [Google Scholar] [CrossRef]
- Bickel, P.J.; Lehmann, E.L. Descriptive statistics for nonparametric models I. Introduction. In Selected Works of E. L. Lehmann; Springer: Boston, MA, USA, 2012; pp. 465–471. [Google Scholar]
- Ebrahimi, N.; Maasoumi, E.; Soofi, E.S. Ordering univariate distributions by entropy and variance. J. Econom. 1999, 90, 317–336. [Google Scholar] [CrossRef]
- Samaniego, F.J. System Signatures and Their Applications in Engineering Reliability; Springer Science and Business Media: New York, NY, USA, 2007; Volume 110. [Google Scholar]
- Navarro, J.; del Aguila, Y.; Sordo, M.A.; SuArez-Llorens, A. Stochastic ordering properties for systems with dependent identically distributed components. Appl. Stoch. Model. Bus. Ind. 2013, 29, 264–278. [Google Scholar] [CrossRef]
- Navarro, J. Preservation of DMRL and IMRL aging classes under the formation of order statistics and coherent systems. Stat. Probab. Lett. 2018, 137, 264–268. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).