
Quantum Collision Models: A Beginner Guide


Abstract
:1. Introduction
2. Basic Collision Model: The Markovian GKSL Master Equation
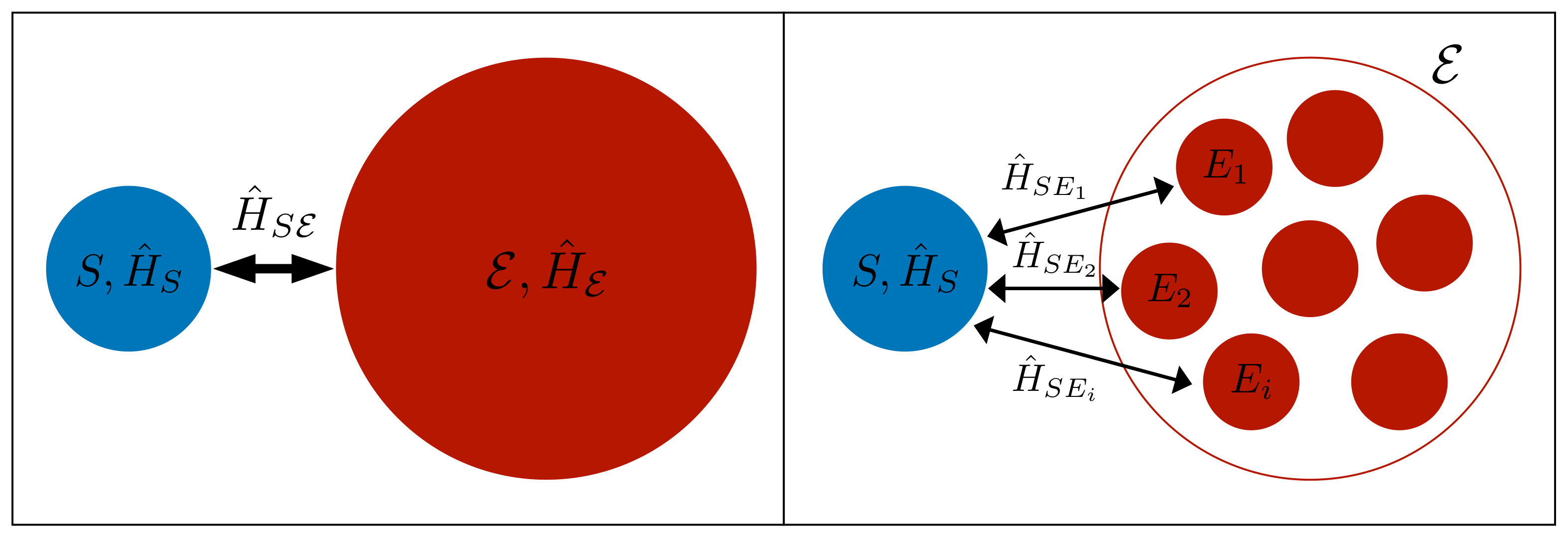
2.1. Modeling the System
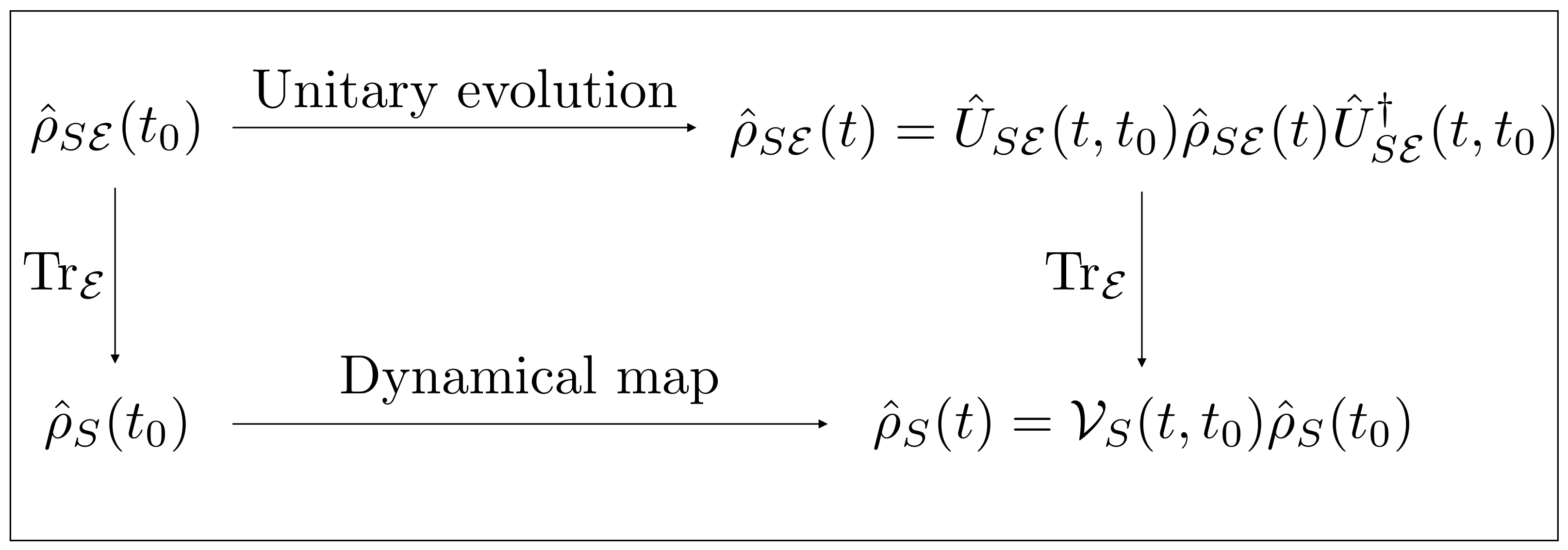
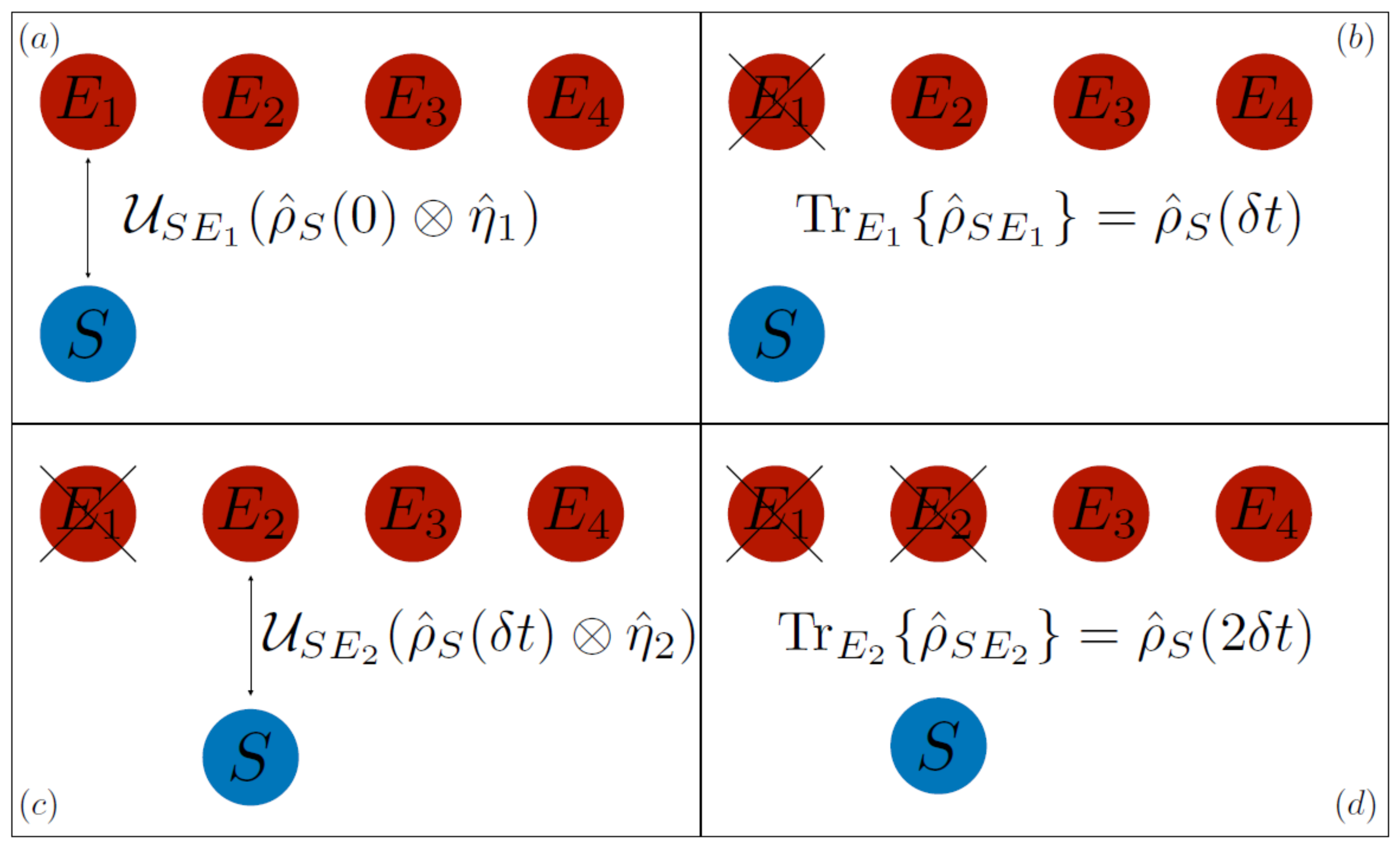
2.2. Modeling the Dynamics
2.3. The Born-Markov Approximation
2.4. The Secular Approximation
2.5. The GKSL Generator
2.6. The Continuous Time Limit
3. Examples
3.1. TLS Interacting with a Bosonic Bath
3.2. Bosonic Mode Interacting with a Bosonic Bath
3.3. TLS Interacting with a TLS Bath
4. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Dirac, P.A.M.; Bohr, N.H.D. The quantum theory of the emission and absorption of radiation. Proc. R. Soc. Lond. Ser. A 1927, 114, 243–265. [Google Scholar] [CrossRef]
- Scully, M.; Zubairy, M. Quantum Optics; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Zurek, W.H. Quantum theory of the classical: Quantum jumps, Born’s Rule and objective classical reality via quantum Darwinism. Philos. Trans. R. Soc. A 2018, 376, 20180107. [Google Scholar] [CrossRef]
- Zurek, W.H. Decoherence, einselection, and the quantum origins of the classical. Rev. Mod. Phys. 2003, 75, 715–775. [Google Scholar] [CrossRef]
- Kosloff, R. Quantum Thermodynamics: A Dynamical Viewpoint. Entropy 2013, 15, 2100–2128. [Google Scholar] [CrossRef]
- Breuer, H.P.; Petruccione, F. The Theory of Open Quantum Systems; Oxford University Press: Oxford, UK, 2002. [Google Scholar] [CrossRef]
- Bloch, F. Nuclear Induction. Phys. Rev. 1946, 70, 460–474. [Google Scholar] [CrossRef]
- Bloch, F.; Hansen, W.W.; Packard, M. The Nuclear Induction Experiment. Phys. Rev. 1946, 70, 474–485. [Google Scholar] [CrossRef]
- Arecchi, F.; Bonifacio, R. Theory of optical maser amplifiers. IEEE J. Quantum Electron. 1965, 1, 169–178. [Google Scholar] [CrossRef]
- Gorini, V.; Kossakowski, A.; Sudarshan, E.C.G. Completely positive dynamical semigroups of N-level systems. J. Math. Phys. 1976, 17, 821–825. [Google Scholar] [CrossRef]
- Lindblad, G. On the generators of quantum dynamical semigroups. Commun. Math. Phys. 1976, 48, 119–130. [Google Scholar] [CrossRef]
- Carmichael, H.J. Quantum trajectory theory for cascaded open systems. Phys. Rev. Lett. 1993, 70, 2273–2276. [Google Scholar] [CrossRef] [PubMed]
- Carmichael, H. An Open Systems Approach to Quantum Optics; Lecture notes in physics monographs; Springer: Berlin, Germany, 1993. [Google Scholar] [CrossRef]
- Dalibard, J.; Castin, Y.; Mølmer, K. Wave-function approach to dissipative processes in quantum optics. Phys. Rev. Lett. 1992, 68, 580–583. [Google Scholar] [CrossRef]
- Dum, R.; Zoller, P.; Ritsch, H. Monte Carlo simulation of the atomic master equation for spontaneous emission. Phys. Rev. A 1992, 45, 4879–4887. [Google Scholar] [CrossRef]
- Gardiner, C.W. Driving a quantum system with the output field from another driven quantum system. Phys. Rev. Lett. 1993, 70, 2269–2272. [Google Scholar] [CrossRef]
- Gardiner, C.W.; Parkins, A.S. Driving atoms with light of arbitrary statistics. Phys. Rev. A 1994, 50, 1792–1806. [Google Scholar] [CrossRef]
- Gardiner, C.W.; Collett, M.J. Input and output in damped quantum systems: Quantum stochastic differential equations and the master equation. Phys. Rev. A 1985, 31, 3761–3774. [Google Scholar] [CrossRef] [PubMed]
- Brun, T.A. A simple model of quantum trajectories. Am. J. Phys. 2002, 70, 719–737. [Google Scholar] [CrossRef]
- Whalen, S.J. Collision model for non-Markovian quantum trajectories. Phys. Rev. A 2019, 100, 052113. [Google Scholar] [CrossRef]
- Gross, J.A.; Caves, C.M.; Milburn, G.J.; Combes, J. Qubit models of weak continuous measurements: Markovian conditional and open-system dynamics. Quantum Sci. Technol. 2018, 3, 024005. [Google Scholar] [CrossRef] [Green Version]
- Cilluffo, D.; Buonaiuto, G.; Lesanovsky, I.; Carollo, A.; Lorenzo, S.; Palma, G.M.; Ciccarello, F.; Carollo, F. Microscopic biasing of discrete-time quantum trajectories. Quantum Sci. Technol. 2021, 6, 045011. [Google Scholar] [CrossRef]
- Dąbrowska, A.; Sarbicki, G.; Chruściński, D. Quantum trajectories for a system interacting with environment in a single-photon state: Counting and diffusive processes. Phys. Rev. A 2017, 96, 053819. [Google Scholar] [CrossRef]
- Rau, J. Relaxation Phenomena in Spin and Harmonic Oscillator Systems. Phys. Rev. 1963, 129, 1880–1888. [Google Scholar] [CrossRef]
- Amato, G.; Breuer, H.P.; Vacchini, B. Microscopic modeling of general time-dependent quantum Markov processes. Phys. Rev. A 2019, 99, 030102. [Google Scholar] [CrossRef]
- Pellegrini, C.; Petruccione, F. Non-Markovian quantum repeated interactions and measurements. J. Phys. A 2009, 42, 425304. [Google Scholar] [CrossRef]
- Man, Z.X.; Xia, Y.J.; Lo Franco, R. Validity of the Landauer principle and quantum memory effects via collisional models. Phys. Rev. A 2019, 99, 042106. [Google Scholar] [CrossRef]
- Lorenzo, S.; Ciccarello, F.; Palma, G.M.; Vacchini, B. Quantum Non-Markovian Piecewise Dynamics from Collision Models. Open Syst. Inf. Dyn. 2017, 24, 1740011. [Google Scholar] [CrossRef]
- Lorenzo, S.; Ciccarello, F.; Palma, G.M. Class of exact memory-kernel master equations. Phys. Rev. A 2016, 93, 052111. [Google Scholar] [CrossRef]
- Ciccarello, F.; Palma, G.M.; Giovannetti, V. Collision-model-based approach to non-Markovian quantum dynamics. Phys. Rev. A 2013, 87, 040103. [Google Scholar] [CrossRef]
- McCloskey, R.; Paternostro, M. Non-Markovianity and system-environment correlations in a microscopic collision model. Phys. Rev. A 2014, 89, 052120. [Google Scholar] [CrossRef] [Green Version]
- Campbell, S.; Ciccarello, F.; Palma, G.M.; Vacchini, B. System-environment correlations and Markovian embedding of quantum non-Markovian dynamics. Phys. Rev. A 2018, 98, 012142. [Google Scholar] [CrossRef]
- Cusumano, S.; Cavina, V.; Keck, M.; Pasquale, A.D.; Giovannetti, V. Entropy production and asymptotic factorization via thermalization: A collisional model approach. Phys. Rev. A 2018, 98, 032119. [Google Scholar] [CrossRef]
- De Chiara, G.; Antezza, M. Quantum machines powered by correlated baths. Phys. Rev. Res. 2020, 2, 033315. [Google Scholar] [CrossRef]
- Chiara, G.D.; Landi, G.; Hewgill, A.; Reid, B.; Ferraro, A.; Roncaglia, A.J.; Antezza, M. Reconciliation of quantum local master equations with thermodynamics. New J. Phys. 2018, 20, 113024. [Google Scholar] [CrossRef]
- Scarani, V.; Ziman, M.; Štelmachovič, P.; Gisin, N.; Bužek, V. Thermalizing Quantum Machines: Dissipation and Entanglement. Phys. Rev. Lett. 2002, 88, 097905. [Google Scholar] [CrossRef] [PubMed]
- Manatuly, A.; Niedenzu, W.; Román-Ancheyta, R.; Çakmak, B.; Müstecaplıoğlu, O.E.; Kurizki, G. Collectively enhanced thermalization via multiqubit collisions. Phys. Rev. E 2019, 99, 042145. [Google Scholar] [CrossRef] [PubMed]
- Strasberg, P.; Schaller, G.; Brandes, T.; Esposito, M. Quantum and Information Thermodynamics: A Unifying Framework Based on Repeated Interactions. Phys. Rev. X 2017, 7, 021003. [Google Scholar] [CrossRef]
- Rodrigues, F.L.S.; De Chiara, G.; Paternostro, M.; Landi, G.T. Thermodynamics of Weakly Coherent Collisional Models. Phys. Rev. Lett. 2019, 123, 140601. [Google Scholar] [CrossRef]
- Leitch, H.; Piccione, N.; Bellomo, B.; De Chiara, G. Driven quantum harmonic oscillators: A working medium for thermal machines. AVS Quantum Sci. 2022, 4, 012001. [Google Scholar] [CrossRef]
- Grimmer, D.; Brown, E.; Kempf, A.; Mann, R.B.; Martín-Martínez, E. Gaussian ancillary bombardment. Phys. Rev. A 2018, 97, 052120. [Google Scholar] [CrossRef] [Green Version]
- Hammam, K.; Leitch, H.; Hassouni, Y.; De Chiara, G. Exploiting coherence for quantum thermodynamic advantage. arXiv 2022, arXiv:2202.07515. [Google Scholar]
- Francesco, C. Collision models in quantum optics. Quantum Meas. Quantum Metrol. 2017, 4, 53–63. [Google Scholar] [CrossRef]
- Cilluffo, D.; Ciccarello, F. Quantum Non-Markovian Collision Models from Colored-Noise Baths. In Advances in Open Systems and Fundamental Tests of Quantum Mechanics; Vacchini, B., Breuer, H.P., Bassi, A., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 29–40. [Google Scholar]
- Cilluffo, D.; Carollo, A.; Lorenzo, S.; Gross, J.A.; Palma, G.M.; Ciccarello, F. Collisional picture of quantum optics with giant emitters. Phys. Rev. Res. 2020, 2, 043070. [Google Scholar] [CrossRef]
- Giovannetti, V.; Palma, G.M. Master equation for cascade quantum channels: A collisional approach. J. Phys. B 2012, 45, 154003. [Google Scholar] [CrossRef]
- Giovannetti, V.; Palma, G.M. Master Equations for Correlated Quantum Channels. Phys. Rev. Lett. 2012, 108, 040401. [Google Scholar] [CrossRef] [PubMed]
- Lorenzo, S.; Farace, A.; Ciccarello, F.; Palma, G.M.; Giovannetti, V. Heat flux and quantum correlations in dissipative cascaded systems. Phys. Rev. A 2015, 91, 022121. [Google Scholar] [CrossRef]
- Cusumano, S.; Mari, A.; Giovannetti, V. Interferometric quantum cascade systems. Phys. Rev. A 2017, 95, 053838. [Google Scholar] [CrossRef]
- Cusumano, S.; Mari, A.; Giovannetti, V. Interferometric modulation of quantum cascade interactions. Phys. Rev. A 2018, 97, 053811. [Google Scholar] [CrossRef]
- Ciccarello, F.; Lorenzo, S.; Giovannetti, V.; Palma, G.M. Quantum collision models: Open system dynamics from repeated interactions. Phys. Rep. 2022, 954, 1–70. [Google Scholar] [CrossRef]
- Altamirano, N.; Corona-Ugalde, P.; Mann, R.B.; Zych, M. Unitarity, feedback, interactions—Dynamics emergent from repeated measurements. New J. Phys. 2017, 19, 013035. [Google Scholar] [CrossRef]
- Redfield, A.G. On the Theory of Relaxation Processes. IBM J. Res. Dev. 1957, 1, 19–31. [Google Scholar] [CrossRef]
- Blum, K. Density Matrix Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
{kind=link}
| Approximation | Microscopic Approach | Collisional Approach |
|---|---|---|
| Stability condition | ||
| Born approximation | Not needed, as it is already encompassed by the assumption of tensorized ancillas | |
| Markov approximation | Not needed, as the ancillas do not interact with each other | |
| Secular approximation | Not needed, as each collision is already completely positive |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cusumano, S. Quantum Collision Models: A Beginner Guide. Entropy 2022, 24, 1258. https://doi.org/10.3390/e24091258
Cusumano S. Quantum Collision Models: A Beginner Guide. Entropy. 2022; 24(9):1258. https://doi.org/10.3390/e24091258
Chicago/Turabian StyleCusumano, Stefano. 2022. "Quantum Collision Models: A Beginner Guide" Entropy 24, no. 9: 1258. https://doi.org/10.3390/e24091258
APA StyleCusumano, S. (2022). Quantum Collision Models: A Beginner Guide. Entropy, 24(9), 1258. https://doi.org/10.3390/e24091258