
Research on Fault Diagnosis of Rolling Bearings Based on Variational Mode Decomposition Improved by the Niche Genetic Algorithm


Abstract
:1. Introduction
- (1)
- The NGA is introduced into the VMD to optimize the selection of the mode number K and penalty factor α.
- (2)
- Compared to VMD and EMD, the effectiveness and accuracy of the NGA-VMD is verified.
- (3)
- The NGA-VMD and PSO-SVM are combined into an effective fault-diagnosis method.
2. Theoretical Basis
2.1. Variational Modal Decomposition
2.2. NGA-VMD Algorithm
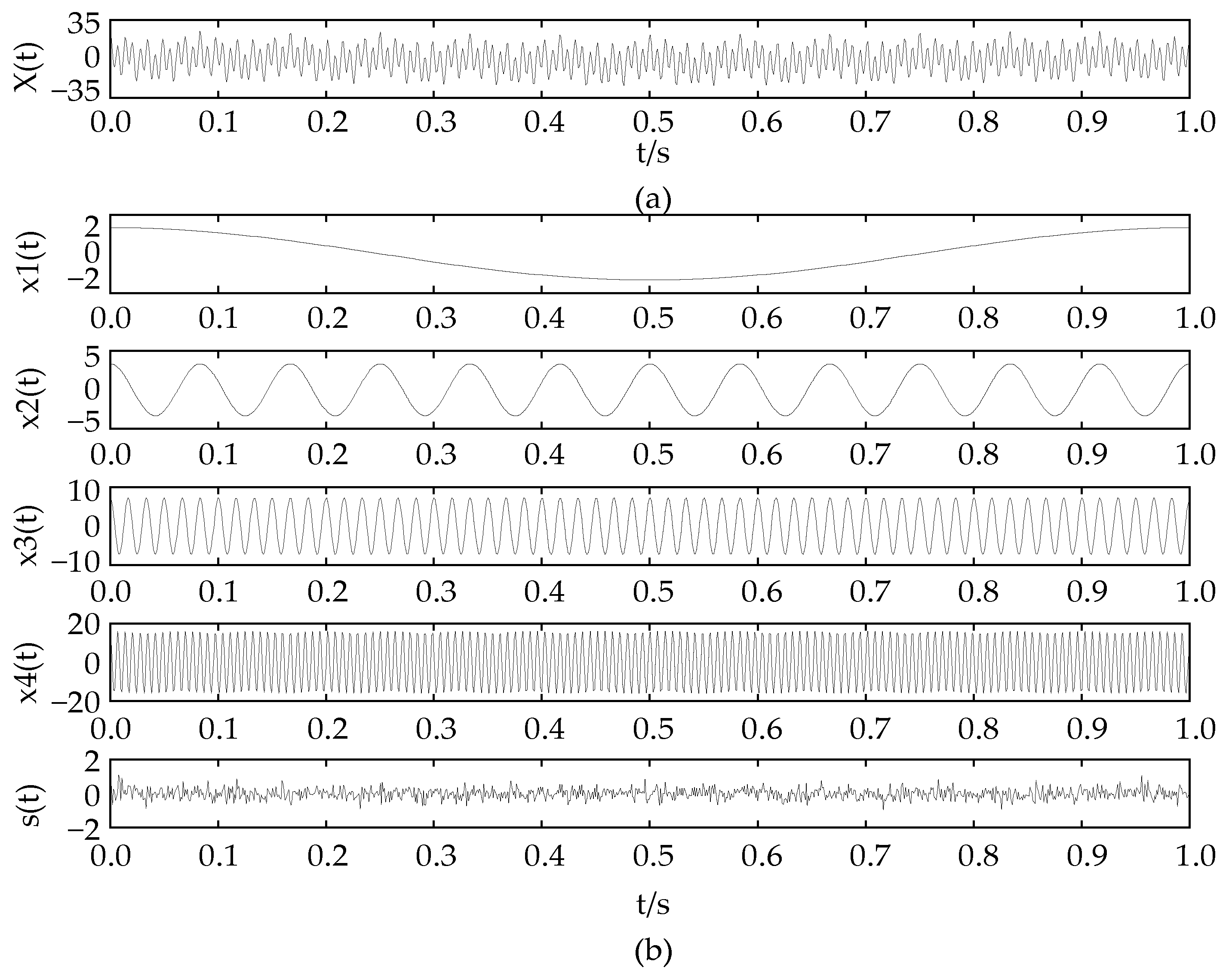
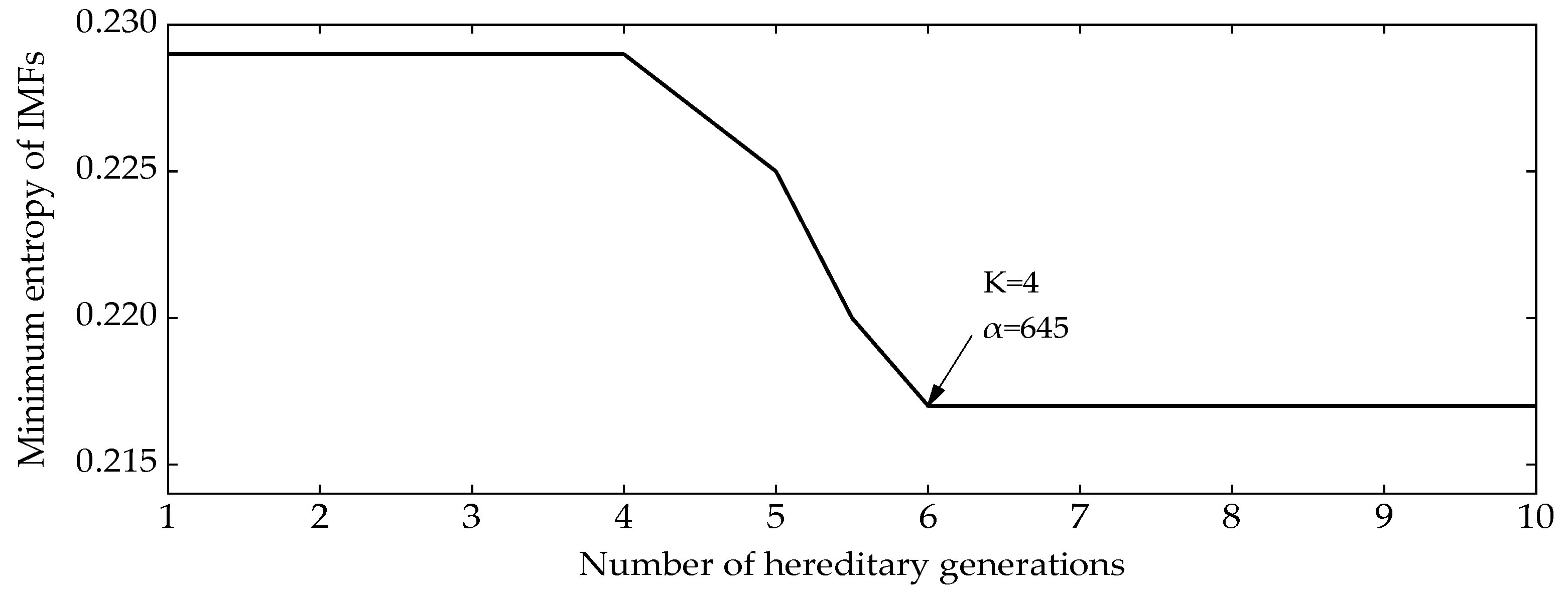
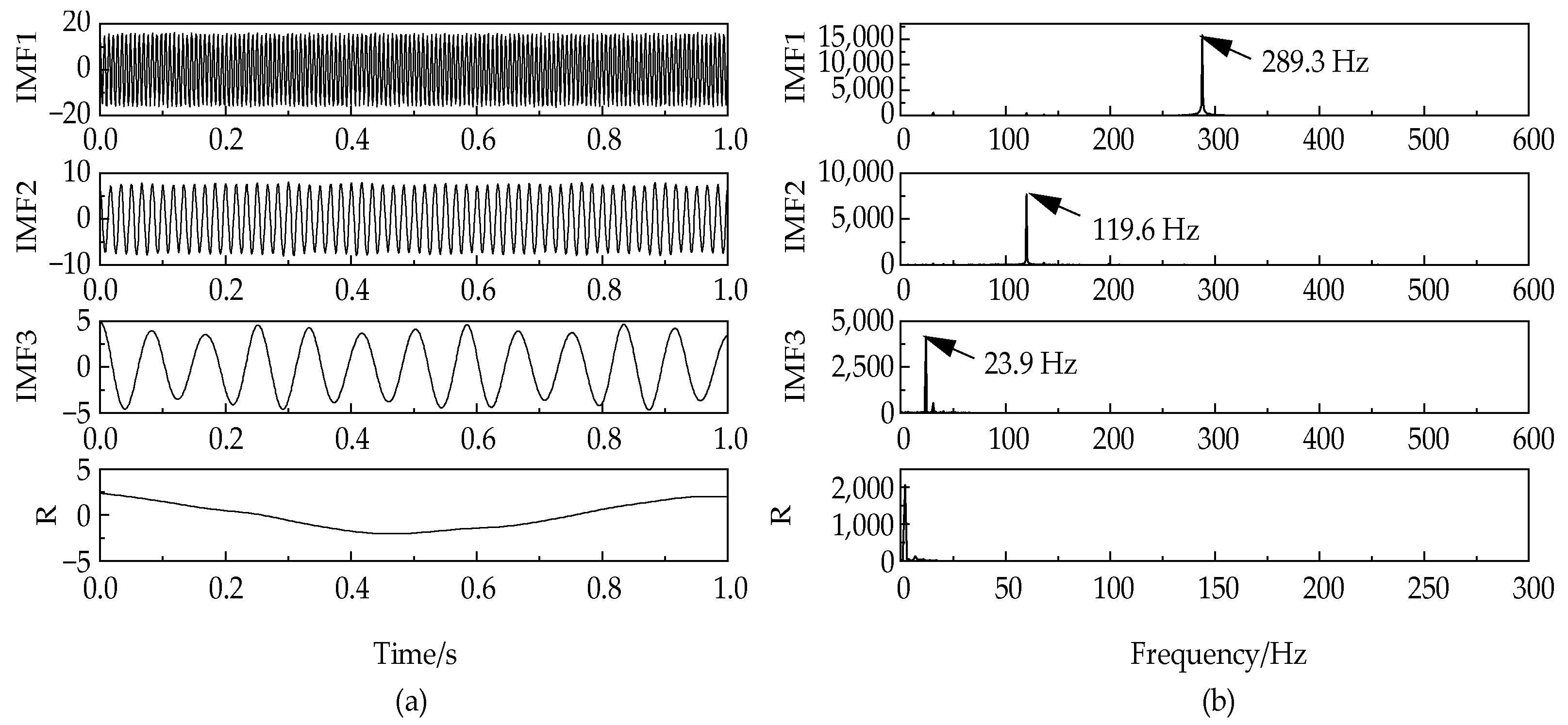
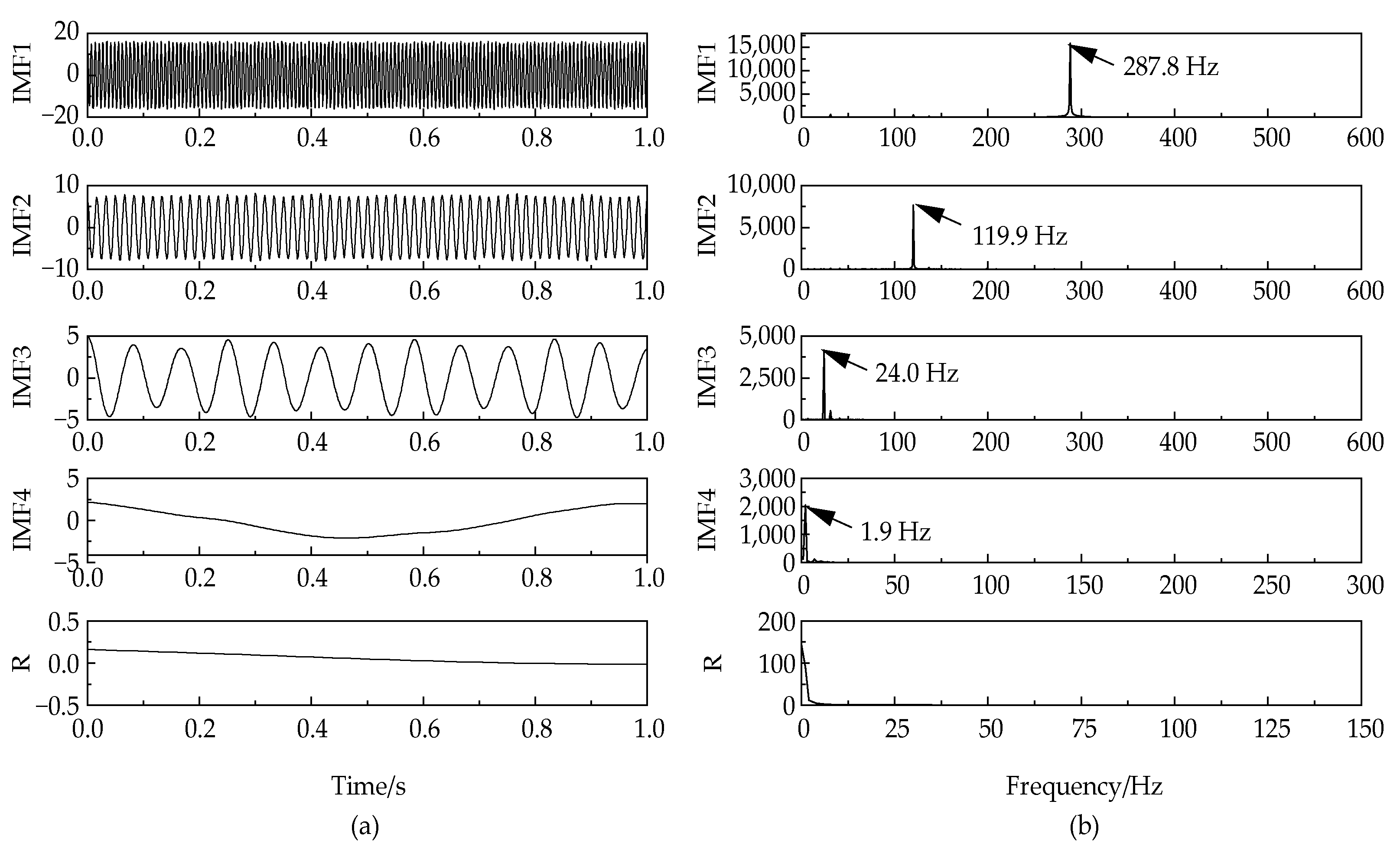
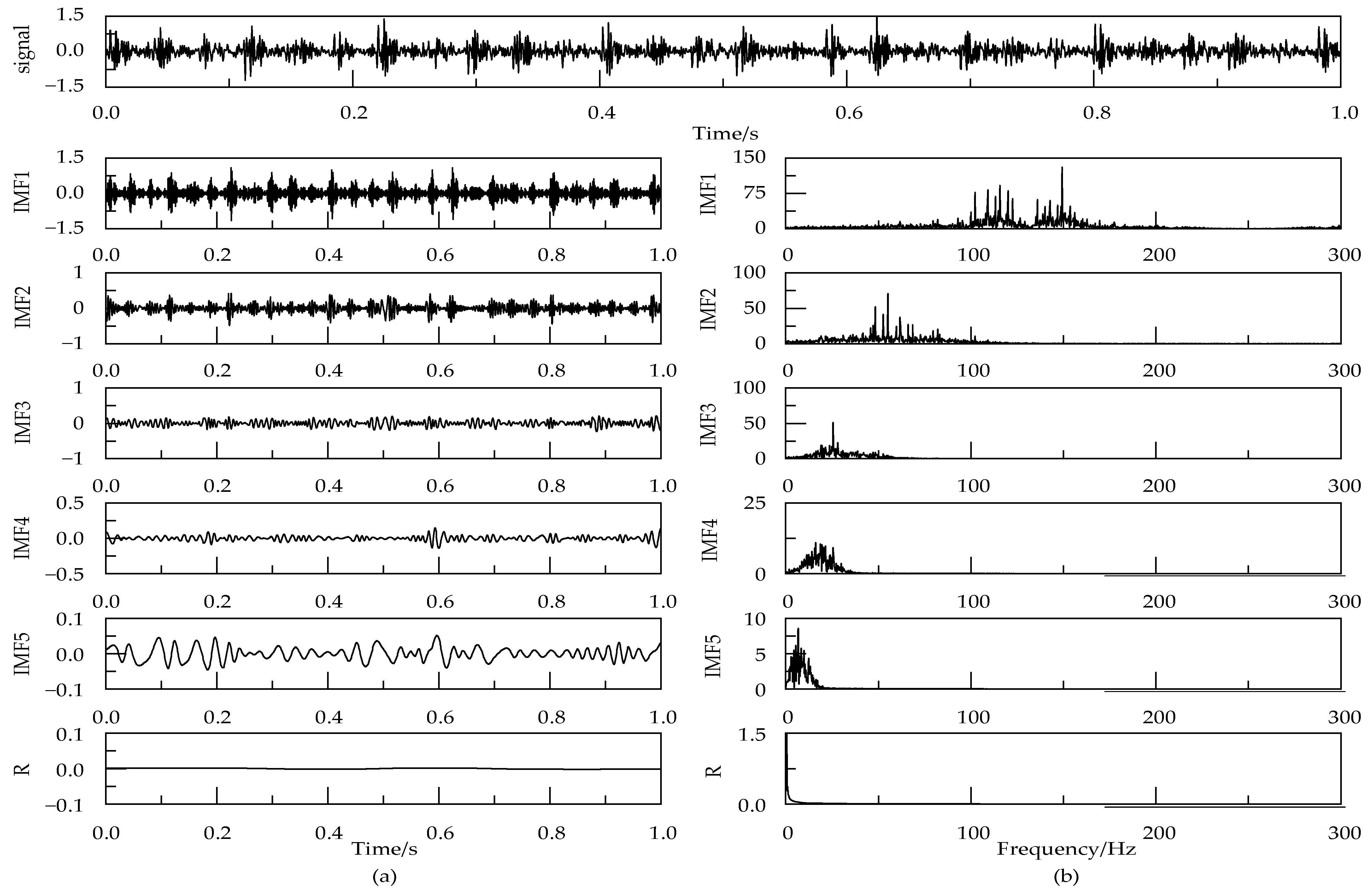
3. Simulation Signal Analysis
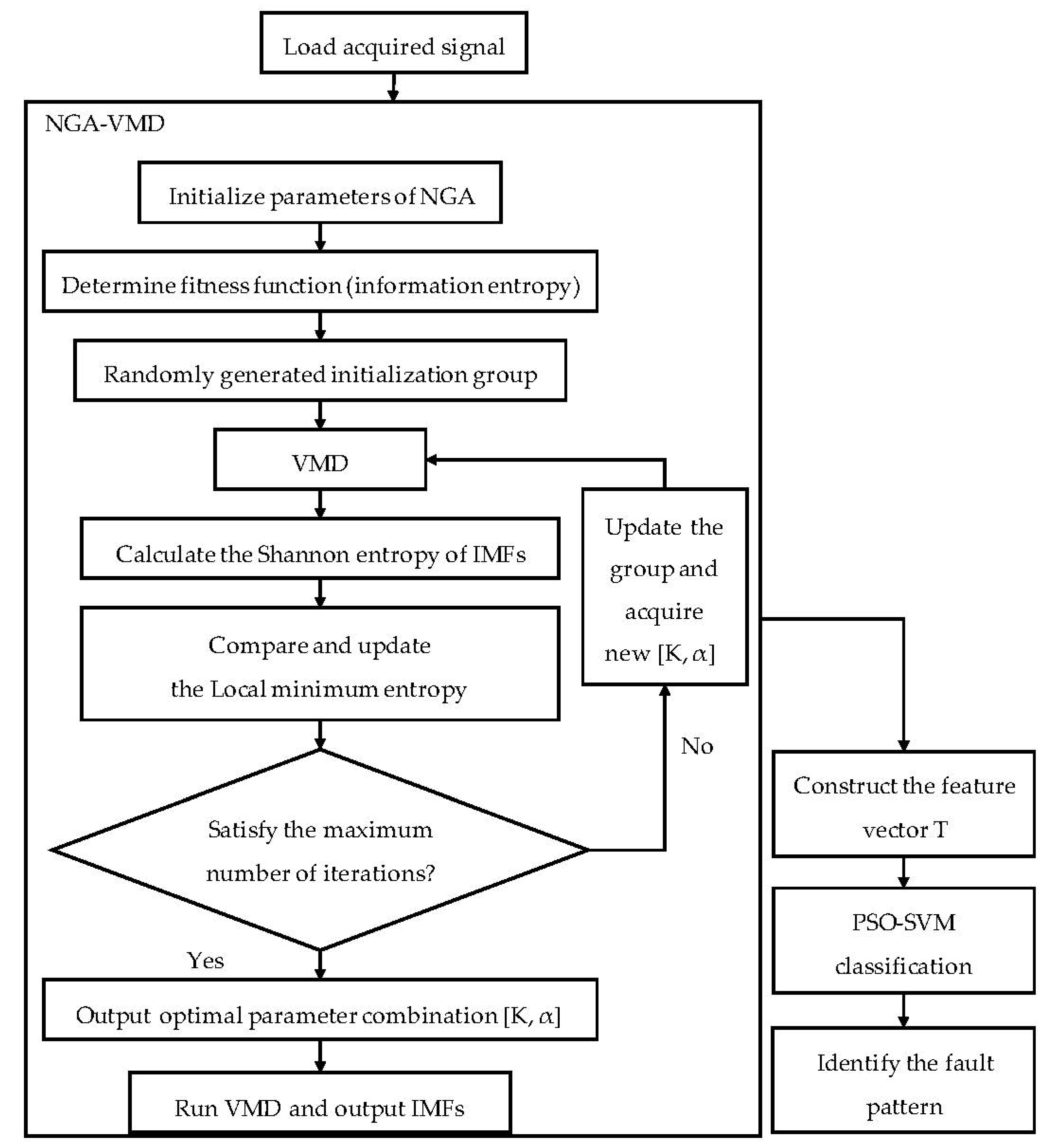
4. Diagnostic Process
- (1)
- Collect and load the operating data of each state of the rolling bearing;
- (2)
- Use the NGA-VMD algorithm to optimize the collected rolling-bearing experimental data to obtain the optimal combination of influencing parameters, and realize the collected signals by decomposition to obtain K modal components, where is k = 1, 2,⋯, K
- (3)
- Calculate the entropy value containing uk, to construct the corresponding energy eigenvector T; construct the value of T as follows:
- (4)
- Input the obtained T value into the PSO-SVM as an input vector and complete the fault type identification and classification of the rolling bearing through the PSO-SVM.
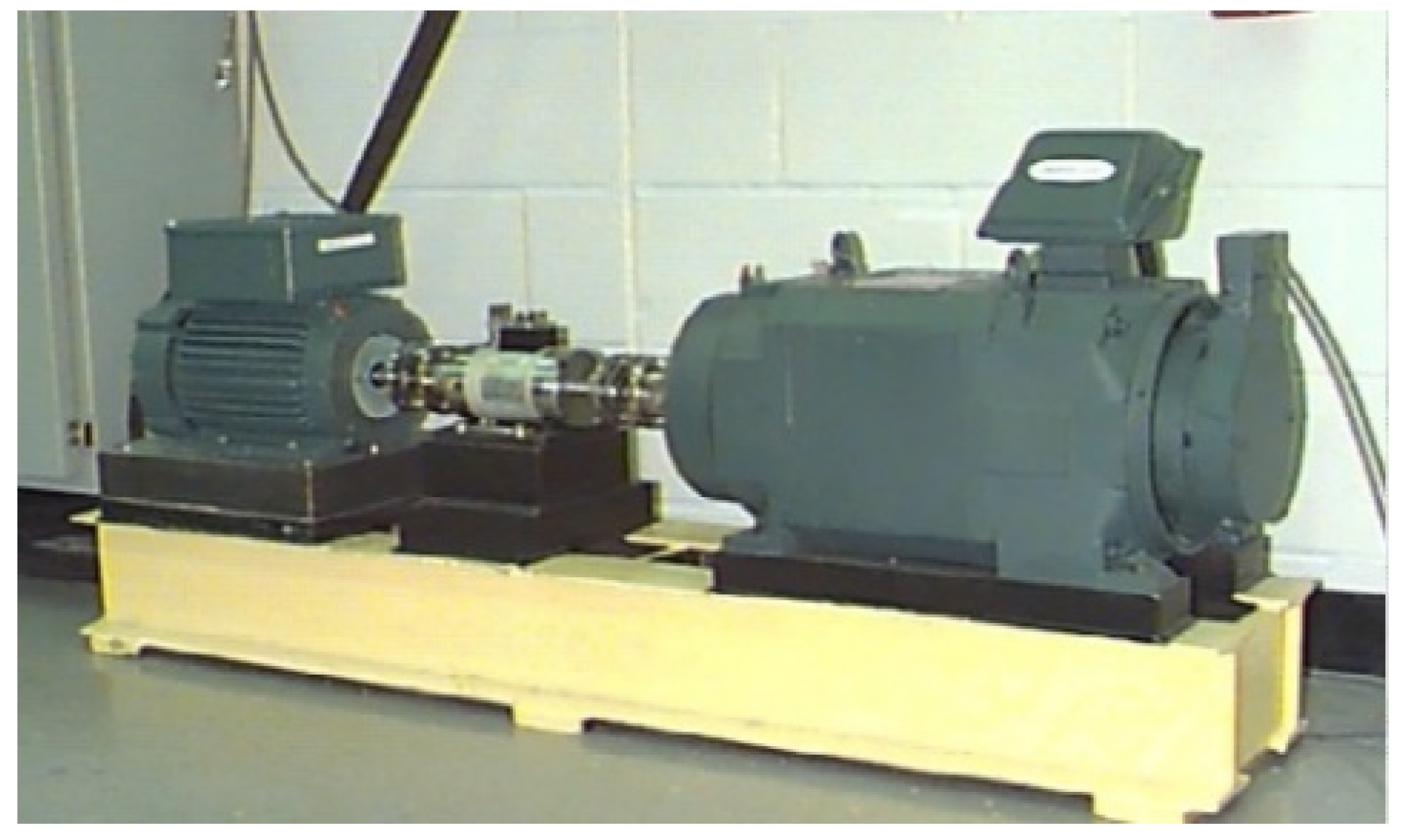
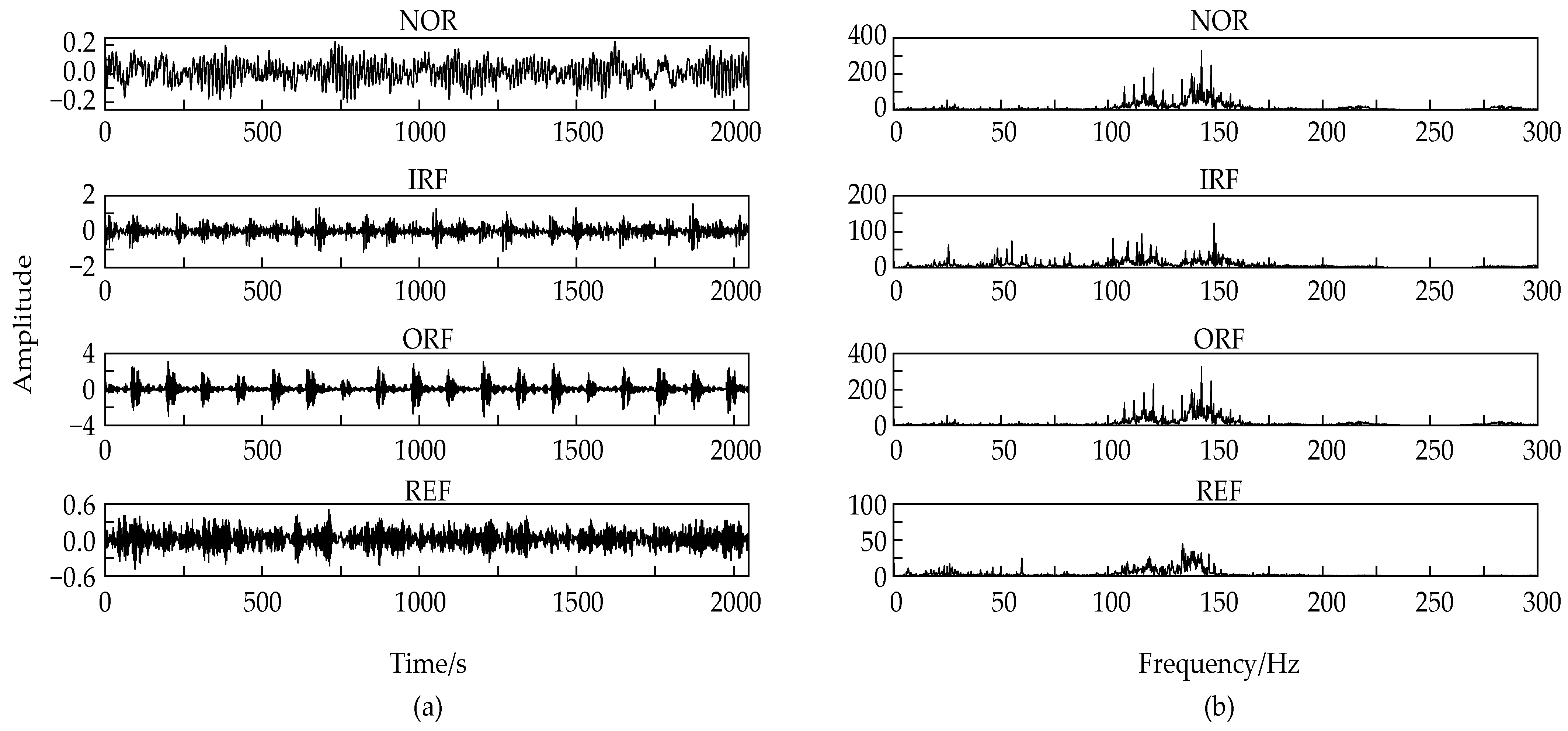
5. Application Case Analysis
6. Conclusions
- (1)
- This paper proposes the NGA-VMD algorithm to reduce the influence of the two key parameters (α, K) of the VMD algorithm. The two affected parameters are optimized for the VMD algorithm to implement signal processing more effectively and accurately. The NGA-VMD algorithm, as a new signal processing method, greatly reduces the interference of human factors on the processing results, has better noise robustness and data processing efficiency, and can better highlight the local characteristics of the original sample data.
- (2)
- Simulation and analysis of experimental results show that relative to VMD and EMD, the NGA-VMD algorithm can achieve rapid adaptive signal decomposition, avoid the occurrence of over or under decomposition, and greatly reduce the interference of human factors. Under the same experimental conditions, the NGA-VMD algorithm performs modal decomposition, and the average correct recognition rate of faults is 99.17%, with the average correct recognition rates of GOA-VMD, VMD, and EMD algorithms being 97.5%, 94.17%, and 87.5%, respectively. The NGA-VMD algorithm takes 95.8 s, which is 7.62% faster than GOA-VMD, 49.9% faster than VMD, and 79.5% faster than EMD.
- (3)
- The NGA introduced in this paper realized the optimization of the VMD algorithm, combined with PSO-SVM to accurately complete the fault identification and classification of rolling bearings, and obtained a good diagnostic effect. It provides a more practical solution for the analysis and treatment of other types of mechanical faults and is worth further in-depth research.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, S.; Jiang, H.; Wu, Z.; Li, X. Data synthesis using deep feature enhanced generative adversarial networks for rolling bearing imbalanced fault diagnosis. Mech. Syst. Signal Process. 2022, 163, 108139. [Google Scholar] [CrossRef]
- Bao, H.; Shi, Z.; Wang, J.; Zhang, Z.; Zhang, G. A Non-Contact Fault Diagnosis Method for Bearings and Gears Based on Generalized Matrix Norm Sparse Filtering. Entropy 2021, 23, 1075. [Google Scholar] [CrossRef] [PubMed]
- Lila, C.; Ahcene, L.; Adberrazek, D.; Mohamed, L.B.; Nouredine, O. Fault diagnosis of rolling bearings in non-stationary running conditions using improved CEEMDAN and multivariate denoising based on wavelet and principal component analyses. Int. J. Adv. Manuf. Technol. 2020, 107, 3859–3873. [Google Scholar] [CrossRef]
- Zheng, J.D.; Pan, H.Y.; Cheng, J.S. Rolling bearing fault detection and diagnosis based on composite multiscale fuzzy entropy and ensemble support vector machines. Mech. Syst. Signal Process. 2017, 85, 746–759. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Shi, R.M.; Yang, Z.J. Feature extraction for hoisting load of multiple rope friction hoist based on improved EMD. J. China Coal Soc. 2014, 39, 782–788. [Google Scholar] [CrossRef]
- Akash, P.; Shakya, P. Spur gear crack modelling and analysis under variable speed conditions using variational mode decomposition. Mech. Mach. Theory 2021, 164, 104357. [Google Scholar] [CrossRef]
- Bai, Y.L.; Liu, M.; Ding, L.; Ma, Y. Double-layer staged training echo-state networks for wind speed prediction using variational mode decomposition. Appl. Energy 2021, 301, 117461. [Google Scholar] [CrossRef]
- Mohsen, M.; Amir, H.G. Prediction error of Johansen cointegration residuals for structural health monitoring. Mech. Syst. Signal Process. 2021, 160, 107847. [Google Scholar] [CrossRef]
- Liu, H.; Mi, X.W.; Li, Y.F. Smart multi-step deep learning model for wind speed forecasting based on variational mode decomposition, singular spectrum analysis, LSTM network and ELM. Energy Convers. Manag. 2018, 159, 54–64. [Google Scholar] [CrossRef]
- Wang, X.; Cao, H.; Duan, X. Crow Search Algorithm for MEMS Gyroscope Temperature Drift Signal and Processing for Denoising. Shock Vib. 2021, 2021, 9929966. [Google Scholar] [CrossRef]
- Yi, C.; Lv, Y.; Dang, Z. A fault diagnosis scheme for rolling bearing based on particle swarm optimization in variational mode decomposition. Shock Vib. 2016, 2016, 9372691. [Google Scholar] [CrossRef] [Green Version]
- Lian, J.; Liu, Z.; Wang, H.; Dong, X. Adaptive variational mode decomposition method for signal processing based on mode characteristic. Mech. Syst. Signal Process. 2018, 107, 53–77. [Google Scholar] [CrossRef]
- Li, Z.; Chen, J.; Zi, Y.; Pan, J. Independence-oriented VMD to identify fault feature for wheel set bearing fault diagnosis of high-speed locomotive. Mech. Syst. Signal Process. 2017, 85, 512–529. [Google Scholar] [CrossRef]
- Zhang, X.; Miao, Q.; Zhang, H.; Wang, L. A parameter-adaptive VMD method based on grasshopper optimization algorithm to analyze vibration signals from rotating machinery. Mech. Syst. Signal Process. 2018, 108, 58–72. [Google Scholar] [CrossRef]
- Jiang, X.; Wang, J.; Shi, J.; Shen, C.; Huang, W.; Zhu, Z. A coarse-to-fine decomposing strategy of VMD for extraction of weak repetitive transients in fault diagnosis of rotating machines. Mech. Syst. Signal Process. 2019, 116, 668–692. [Google Scholar] [CrossRef]
- Ni, Q.; Ji, J.C.; Feng, K.; Benjamin, H. A fault information-guided variational mode decomposition (FIVMD) method for rolling element bearings diagnosis. Mech. Syst. Signal Process. 2022, 164, 108216. [Google Scholar] [CrossRef]
- Liang, T.; Lu, H.; Sun, H. Application of Parameter Optimized Variational Mode Decomposition Method in Fault Feature Extraction of Rolling Bearing. Entropy 2021, 23, 520. [Google Scholar] [CrossRef]
- He, X.; Zhou, X.; Yu, W.; Hou, Y.; Chris, K.M. Adaptive variational mode decomposition and its application to multi-fault detection using mechanical vibration signals. ISA Trans. 2021, 111, 360–375. [Google Scholar] [CrossRef]
- Li, C.; Liu, Y.; Liao, Y. An Improved Parameter-Adaptive Variational Mode Decomposition Method and Its Application in Fault Diagnosis of Rolling Bearings. Shock Vib. 2021, 2021, 2968488. [Google Scholar] [CrossRef]
- Wang, H.; Wu, F.; Zhang, L. Application of variational mode decomposition optimized with improved whale optimization algorithm in bearing failure diagnosis. Alex. Eng. J. 2021, 60, 4689–4699. [Google Scholar] [CrossRef]
- Ye, M.; Yan, X.; Jia, M. Rolling Bearing Fault Diagnosis Based on VMD-MPE and PSO-SVM. Entropy 2021, 23, 762. [Google Scholar] [CrossRef] [PubMed]
- Kang, Y.; Son, J.; Lim, D. Optimal Design of IPMSM for Fuel Cell Electric Vehicles Using Autotuning Elliptical Niching Genetic Algorithm. IEEE Access 2020, 8, 117405–117412. [Google Scholar] [CrossRef]
- Wang, F.; Zhou, L.D.; Ren, H.; Liu, X.L. Search Improvement Process-Chaotic Optimization-Particle Swarm Optimization-Elite Retention Strategy and Improved Com-bined Cooling-Heating-Power Strategy Based Two-Time Scale Multi-Objective Optimization Model for Stand-Alone Mi-crogrid Operation. Energies 2017, 10, 1936. [Google Scholar] [CrossRef] [Green Version]
- Cholewa, M.; Placzek, B. Application of Positional Entropy to Fast Shannon Entropy Estimation for Samples of Digital Signals. Entropy 2020, 22, 1173. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Middle Diameter of Bearing | Diameter of the Roller | Contact Angle | Number of Rollers |
|---|---|---|---|
| 38.5 mm | 8 mm | 0° | 9 |
| Rotational Speed | Diameter of Fault Point | Sampling Frequency | Initial Number of Sampling Point |
|---|---|---|---|
| 1797 r/min | 0.1778 mm | 12 kHz | 2048 |
| Sampling Points | Average Entropy |
|---|---|
| 512 | 0.863 |
| 1024 | 0.851 |
| 2048 | 0.644 |
| 4086 | 0.631 |
| 8192 | 0.620 |
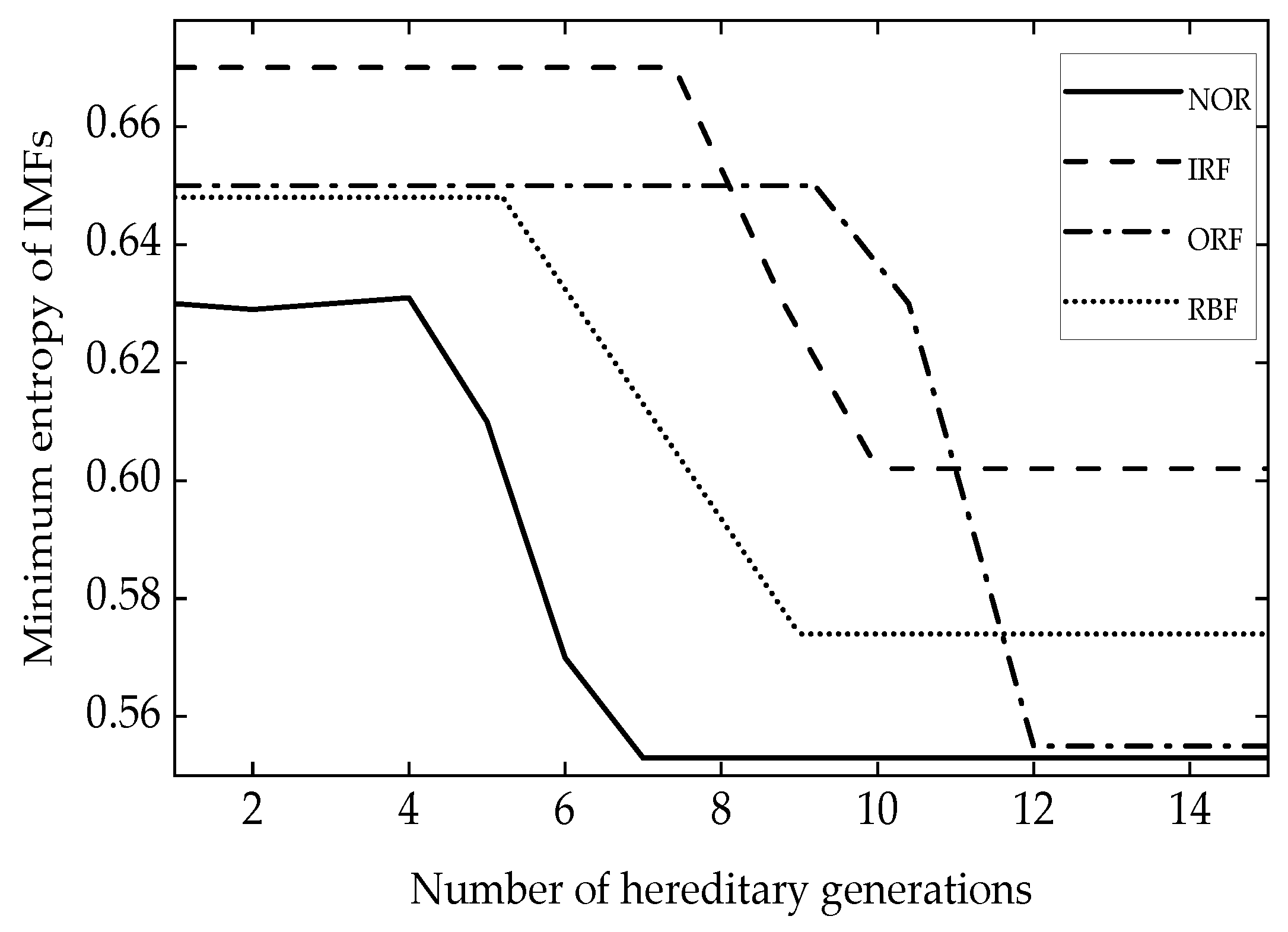
| State | Local Minimum Entropy | (K, α) |
|---|---|---|
| NOR | 0.5602 | (4, 860) |
| IRF | 0.5998 | (7, 1000) |
| ORF | 0.5473 | (9, 1200) |
| REF | 0.5728 | (5, 600) |
| State | Sample | T | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| E1 | E2 | E3 | E4 | E5 | E6 | E7 | E8 | E9 | ||
| NOR | 1 | 0.2159 | 0.3151 | 0.2621 | 0.2319 | — | — | — | — | — |
| 2 | 0.2239 | 0.3381 | 0.2113 | 0.2245 | — | — | — | — | — | |
| IRF | 1 | 0.1023 | 0.1802 | 0.2634 | 0.3011 | 0.3689 | 0.3731 | 0.3623 | — | — |
| 2 | 0.1076 | 0.1864 | 0.2788 | 0.2193 | 0.3514 | 0.3677 | 0.3799 | — | — | |
| ORF | 1 | 0.1143 | 0.2001 | 0.3114 | 0.2987 | 0.4567 | 0.4312 | 0.4501 | 0.3644 | 0.3127 |
| 2 | 0.1533 | 0.2409 | 0.3002 | 0.3233 | 0.4763 | 0.4772 | 0.3986 | 0.3876 | 0.3321 | |
| REF | 1 | 0.1556 | 0.2192 | 0.4018 | 0.4871 | 0.1984 | — | — | — | — |
| 2 | 0.1848 | 0.2997 | 0.3851 | 0.4639 | 0.1869 | — | — | — | — | |
| State | NOR | IRF | ORF | REF | Average Accuracy | Running Time/s | ||
|---|---|---|---|---|---|---|---|---|
| Number of samples | 30 | 30 | 30 | 30 | 99.17% | 95.8 | ||
| Signal processing | NGA-VMD | NOR | 30 | 0 | 0 | 0 | ||
| IRF | 0 | 30 | 0 | 1 | ||||
| ORF | 0 | 0 | 30 | 0 | ||||
| REF | 0 | 0 | 0 | 29 | ||||
| Classification accuracy | 100% | 100% | 100% | 96.67% | ||||
| GOA-VMD | NOR | 30 | 0 | 0 | 0 | 97.50% | 103.1 | |
| IRF | 0 | 29 | 1 | 1 | ||||
| ORF | 0 | 0 | 29 | 0 | ||||
| REF | 0 | 1 | 0 | 29 | ||||
| Classification accuracy | 100% | 96.67% | 96.67% | 96.67% | ||||
| VMD | NOR | 30 | 0 | 0 | 0 | 94.17% | 143.6 | |
| IRF | 0 | 29 | 0 | 0 | ||||
| ORF | 0 | 1 | 28 | 4 | ||||
| REF | 0 | 0 | 2 | 26 | ||||
| Classification accuracy | 100% | 96.67% | 93.33% | 86.67% | ||||
| EMD | NOR | 30 | 0 | 0 | 0 | 87.50% | 171.9 | |
| IRF | 0 | 26 | 2 | 3 | ||||
| ORF | 0 | 4 | 25 | 2 | ||||
| REF | 0 | 0 | 3 | 24 | ||||
| Classification accuracy | 100% | 86.67% | 83.33% | 80.00% | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, R.; Wang, B.; Wang, Z.; Liu, J.; Feng, X.; Dong, L. Research on Fault Diagnosis of Rolling Bearings Based on Variational Mode Decomposition Improved by the Niche Genetic Algorithm. Entropy 2022, 24, 825. https://doi.org/10.3390/e24060825
Shi R, Wang B, Wang Z, Liu J, Feng X, Dong L. Research on Fault Diagnosis of Rolling Bearings Based on Variational Mode Decomposition Improved by the Niche Genetic Algorithm. Entropy. 2022; 24(6):825. https://doi.org/10.3390/e24060825
Chicago/Turabian StyleShi, Ruimin, Bukang Wang, Zongyan Wang, Jiquan Liu, Xinyu Feng, and Lei Dong. 2022. "Research on Fault Diagnosis of Rolling Bearings Based on Variational Mode Decomposition Improved by the Niche Genetic Algorithm" Entropy 24, no. 6: 825. https://doi.org/10.3390/e24060825
APA StyleShi, R., Wang, B., Wang, Z., Liu, J., Feng, X., & Dong, L. (2022). Research on Fault Diagnosis of Rolling Bearings Based on Variational Mode Decomposition Improved by the Niche Genetic Algorithm. Entropy, 24(6), 825. https://doi.org/10.3390/e24060825