
Maximum Correntropy with Variable Center Unscented Kalman Filter for Robust Power System State Estimation



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
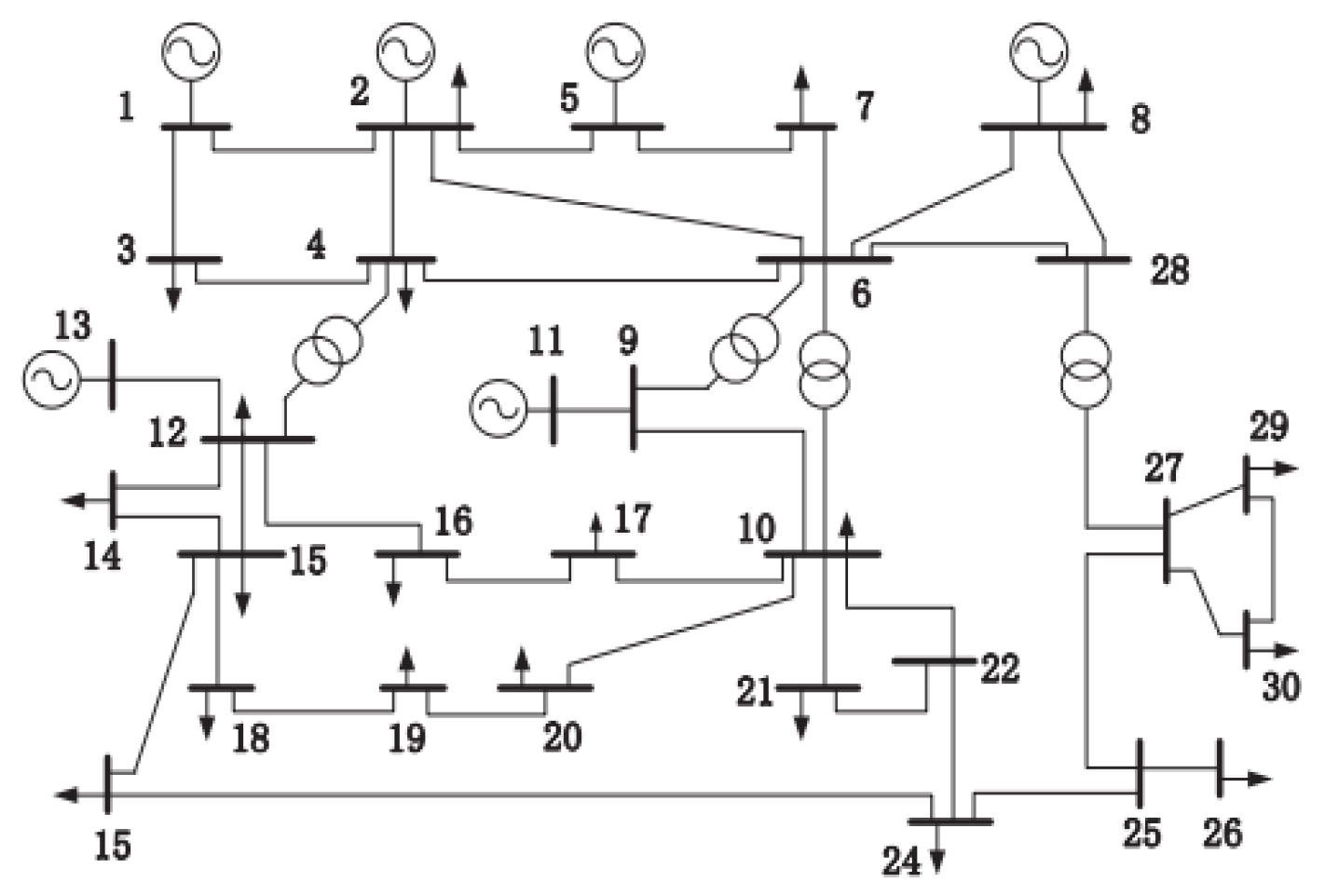
2.1. Model of the Power System
2.2. Correntropy with Variable Center
3. Maximum Correntropy with Variable Center Unscented Kalman Filter for Robust State Estimation
3.1. MCVUKF
3.1.1. Time Update
3.1.2. Measurement Update
3.1.3. Optimization of the Free Parameters and c
3.2. En-MCVUKF
| Algorithm 1 En-MCVUKF Algorithm for Power System State Estimation |
| Input: An initial estimation of state vector with the covariance matrix , two initial values for free parameters and c, a small enough positive value , and the number of max iterations , set . |
| Output: The estimation of state vector and the posterior covariance matrix . |
|
4. Numerical Results
4.1. Simulation Settings
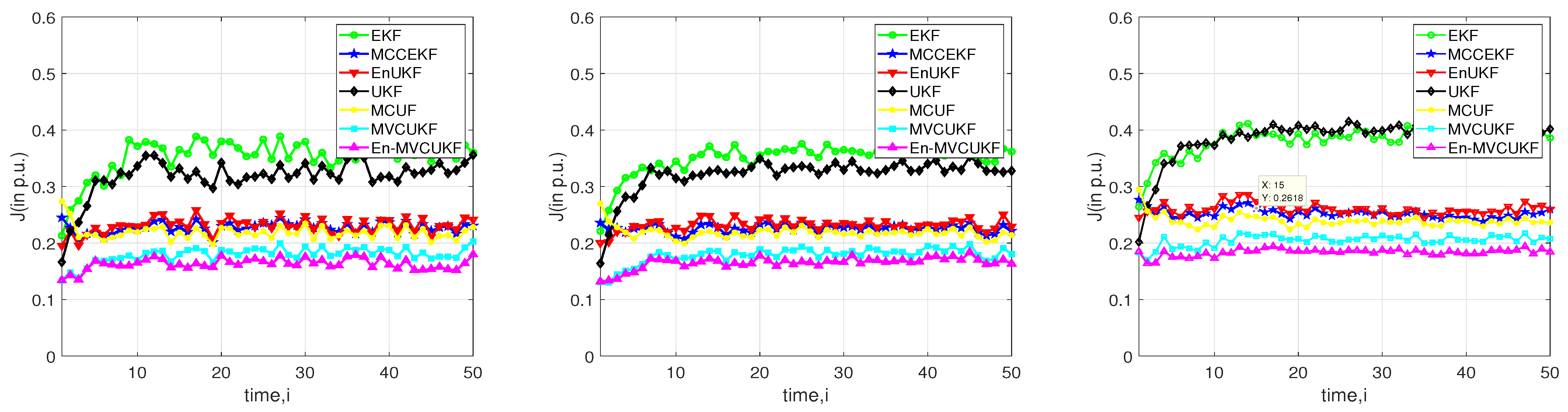
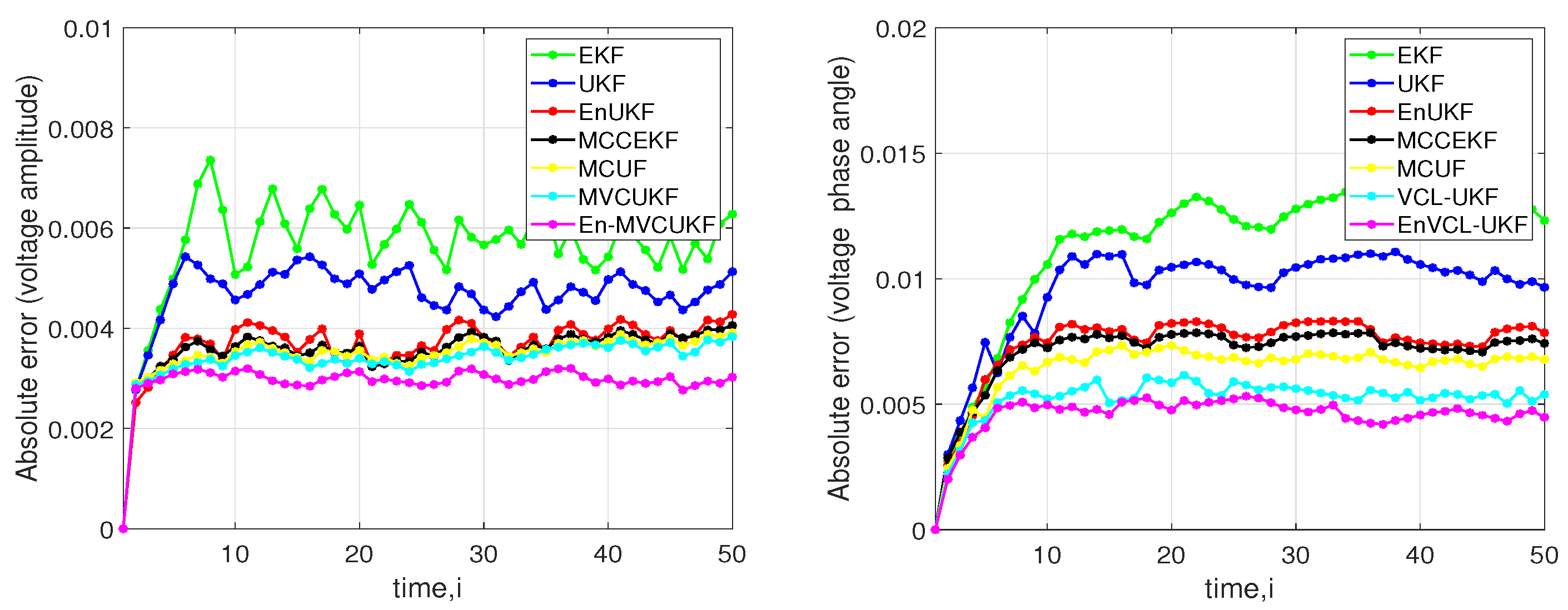
4.2. Case 1: Non-Gaussian Noise with Outliers in Measurements
- Mixed-Gaussian noise model: The model for the mixed-Gaussian noise is expressed as:where denotes the Gaussian distributions with mean values and variances , and stands for the mixture coefficient. Usually, . Hence, the parameter vector for the mixed Gaussian noise is defined as .
- Laplace noise model: The Laplace noise is distributed with probability density function (PDF):
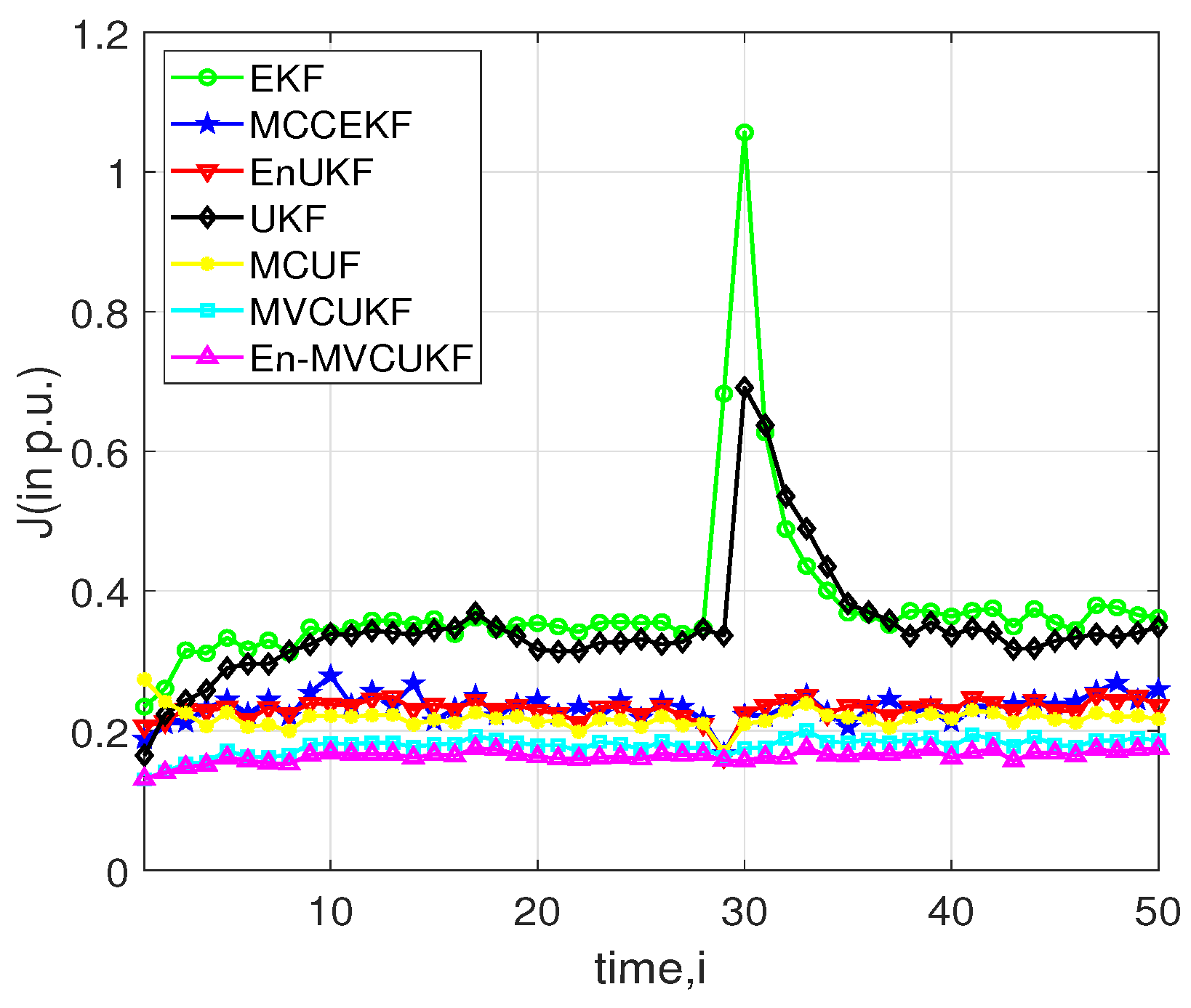
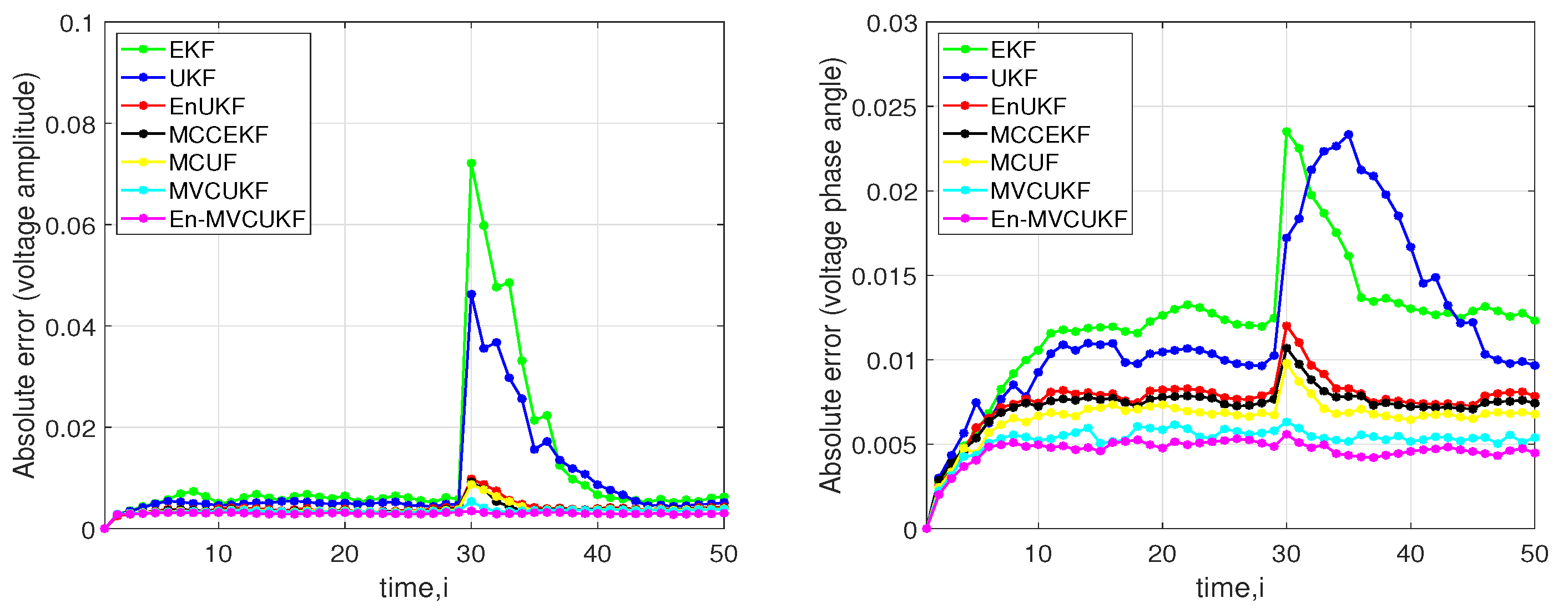
- The overall filtering performance of the proposed MVCUKF and En-MVCUKF methods is the best and the second best in three used test power systems when compared with five state-of-the-art methods, indicating that the proposed method is of superiority. The main reasons can be summarized as follows:
- (1)
- Compared with the MMSE criterion-based KF methods (i.e., EKF, UKF, and EnUKF), the proposed methods adopt the robust maximum correntropy criterion with a variable center to suppress the bad influence of the heavy-tailed non-Gaussian noise in PSSE;
- (2)
- Compared with the MCC-based robust KF methods (i.e., MCCEKF and MCUF) that have a fixed center in correntropy, the MVCUKF and En-MVCUKF methods utilize an enhanced version of the traditional correntropy whose center can be located at any position; thus, they can be more robust to the non-zero-mean non-Gaussian noise;
- In the same situation, the original MCC and MCC with variable center-based KF methods can achieve better filtering performance than the MMSE-based KF methods, which indicates the robustness of correntropy and its enhanced version used in the KF model.
- Clearly, the enhanced KF methods (e.g., EnUKF and En-MVCUKF) usually have slightly better filtering performance than the original UKF and MVCUKF methods. That demonstrates that using an exponential function of the innovation vector to adjust a covariance matrix can effectively improve the filtering performance in power systems for state estimation.
4.3. Case 2: Bad Measurement Data and Sudden Load State Change
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abur, A.; Exposito, A.G. Power System State Estimation: Theory and Implementation; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Wang, Y.; Sun, Y.; Dinavahi, V. Robust forecasting-aided state estimation for power system against uncertainties. IEEE Trans. Power Syst. 2019, 35, 691–702. [Google Scholar] [CrossRef]
- Cheng, C.; Bai, X. Robust forecasting-aided state estimation in power distribution systems with event-triggered transmission and reduced mixed measurements. IEEE Trans. Power Syst. 2021, 36, 4343–4354. [Google Scholar] [CrossRef]
- Wang, S.; Wang, W.; Chen, B.; Chi, K.T. Convergence analysis of nonlinear Kalman filters with novel innovation-based method. Neurocomputing 2018, 289, 188–194. [Google Scholar] [CrossRef]
- Muscas, C.; Pegoraro, P.A.; Sulis, S.; Pau, M.; Ponci, F.; Monti, A. New Kalman filter approach exploiting frequency knowledge for accurate PMU-based power system state estimation. IEEE Trans. Instrum. Meas. 2020, 69, 6713–6722. [Google Scholar] [CrossRef]
- Khalili, R.; Abur, A. PMU-based decoupled state estimation for unsymmetrical power systems. IEEE Trans. Power Syst. 2021, 36, 5359–5368. [Google Scholar] [CrossRef]
- Reif, K.; Gunther, S.; Yaz, E.; Unbehauen, R. Stochastic stability of the discrete-time extended Kalman filter. IEEE Trans. Autom. Control 1999, 44, 714–728. [Google Scholar] [CrossRef]
- Jiang, C.; Wang, S.; Wu, B.; Fernandez, C.; Xiong, X.; Coffie-Ken, J. A state-of-charge estimation method of the power lithium-ion battery in complex conditions based on adaptive square root extended Kalman filter. Energy 2021, 219, 119603. [Google Scholar] [CrossRef]
- Wan, E.A.; Van Der Merwe, R.; Haykin, S. The unscented Kalman filter. Kalman Filter. Neural Netw. 2001, 5, 221–280. [Google Scholar]
- Peng, N.; Zhang, S.; Guo, X.; Zhang, X. Online parameters identification and state of charge estimation for lithium-ion batteries using improved adaptive dual unscented Kalman filter. Int. J. Energy Res. 2021, 45, 975–990. [Google Scholar] [CrossRef]
- Zhao, J. Dynamic State Estimation With Model Uncertainties Using H∞ Extended Kalman Filter. IEEE Trans. Power Syst. 2017, 33, 1099–1100. [Google Scholar] [CrossRef]
- Ma, W.; Zheng, D.; Zhang, Z.; Duan, J.; Qiu, J.; Hu, X. Sparse-aware bias-compensated adaptive filtering algorithms using the maximum correntropy criterion for sparse system identification with noisy input. Entropy 2018, 20, 407. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ma, W.; Qiu, J.; Liang, J.; Chen, B. Linear Kalman filtering algorithm with noisy control input variable. IEEE Trans. Circuits Syst. II Express Briefs 2018, 66, 1282–1286. [Google Scholar] [CrossRef]
- Bai, M.; Huang, Y.; Chen, B.; Zhang, Y. A Novel Robust Kalman Filtering Framework Based on Normal-Skew Mixture Distribution. IEEE Trans. Syst. Man Cybern. Syst. 2021, 1–17. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, J.; Huang, Z.; Diao, R. Assessing Gaussian assumption of PMU measurement error using field data. IEEE Trans. Power Deliv. 2017, 33, 3233–3236. [Google Scholar] [CrossRef]
- Liu, X.; Chen, B.; Xu, B.; Wu, Z.; Honeine, P. Maximum correntropy unscented filter. Int. J. Syst. Sci. 2017, 48, 1607–1615. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Ren, Z.; Lyu, H.; Jiang, Z.; Ren, P.; Chen, B. Linear and nonlinear regression-based maximum correntropy extended Kalman filtering. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 3093–3102. [Google Scholar] [CrossRef]
- Dang, L.; Chen, B.; Wang, S.; Gu, Y.; Príncipe, J.C. Kernel Kalman filtering with conditional embedding and maximum correntropy criterion. IEEE Trans. Circuits Syst. I Regul. Pap. 2019, 66, 4265–4277. [Google Scholar] [CrossRef]
- Chen, B.; Dang, L.; Gu, Y.; Zheng, N.; Príncipe, J.C. Minimum error entropy Kalman filter. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 5819–5829. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Guo, Y.; Meng, Q. Variational Bayesian-Based Improved Maximum Mixture Correntropy Kalman Filter for Non-Gaussian Noise. Entropy 2022, 24, 117. [Google Scholar] [CrossRef]
- Wu, Z.; Peng, S.; Ma, W.; Chen, B.; Principe, J.C. Minimum error entropy algorithms with sparsity penalty constraints. Entropy 2015, 17, 3419–3437. [Google Scholar] [CrossRef] [Green Version]
- Peng, S.; Chen, B.; Sun, L.; Ser, W.; Lin, Z. Constrained maximum correntropy adaptive filtering. Signal Process. 2017, 140, 116–126. [Google Scholar] [CrossRef] [Green Version]
- Dang, L.; Chen, B.; Huang, Y.; Zhang, Y.; Zhao, H. Cubature Kalman Filter Under Minimum Error Entropy With Fiducial Points for INS/GPS Integration. IEEE/CAA J. Autom. Sin. 2021, 9, 450–465. [Google Scholar] [CrossRef]
- Wu, Z.; Peng, S.; Chen, B.; Zhao, H. Robust Hammerstein adaptive filtering under maximum correntropy criterion. Entropy 2015, 17, 7149–7166. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Liu, X.; Zhao, H.; Principe, J.C. Maximum correntropy Kalman filter. Automatica 2017, 76, 70–77. [Google Scholar] [CrossRef] [Green Version]
- Peng, S.; Ser, W.; Chen, B.; Sun, L.; Lin, Z. Robust constrained adaptive filtering under minimum error entropy criterion. IEEE Trans. Circuits Syst. II Express Briefs 2018, 65, 1119–1123. [Google Scholar] [CrossRef]
- Zhang, Z.; Qiu, J.; Ma, W. Adaptive extended Kalman filter with correntropy loss for robust power system state estimation. Entropy 2019, 21, 293. [Google Scholar] [CrossRef] [Green Version]
- Ma, W.; Qiu, J.; Liu, X.; Xiao, G.; Duan, J.; Chen, B. Unscented Kalman filter with generalized correntropy loss for robust power system forecasting-aided state estimation. IEEE Trans. Ind. Inform. 2019, 15, 6091–6100. [Google Scholar] [CrossRef]
- Dang, L.; Chen, B.; Wang, S.; Ma, W.; Ren, P. Robust power system state estimation with minimum error entropy unscented Kalman filter. IEEE Trans. Instrum. Meas. 2020, 69, 8797–8808. [Google Scholar] [CrossRef]
- Chen, B.; Wang, X.; Li, Y.; Principe, J.C. Maximum correntropy criterion with variable center. IEEE Signal Process. Lett. 2019, 26, 1212–1216. [Google Scholar] [CrossRef] [Green Version]
- Sun, Q.; Zhang, H.; Wang, X.; Ma, W.; Chen, B. Sparsity constrained recursive generalized maximum correntropy criterion with variable center algorithm. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 3517–3521. [Google Scholar] [CrossRef]
- Principe, J.C.; Xu, D.; Fisher, J.; Haykin, S. Information theoretic learning. Unsupervised Adapt. Filter. 2000, 1, 265–319. [Google Scholar]
- Heravi, A.R.; Hodtani, G.A. A new correntropy-based conjugate gradient backpropagation algorithm for improving training in neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 6252–6263. [Google Scholar] [CrossRef] [PubMed]
- Peng, S.; Ser, W.; Chen, B.; Lin, Z. Robust semi-supervised nonnegative matrix factorization for image clustering. Pattern Recognit. 2021, 111, 107683. [Google Scholar] [CrossRef]
- Song, H.; Ding, D.; Dong, H.; Yi, X. Distributed filtering based on Cauchy-kernel-based maximum correntropy subject to randomly occurring cyber-attacks. Automatica 2022, 135, 110004. [Google Scholar] [CrossRef]
- Liu, W.; Pokharel, P.P.; Principe, J.C. Correntropy: Properties and applications in non-Gaussian signal processing. IEEE Trans. Signal Process. 2007, 55, 5286–5298. [Google Scholar] [CrossRef]
- Shih, K.R.; Huang, S.J. Application of a robust algorithm for dynamic state estimation of a power system. IEEE Trans. Power Syst. 2002, 17, 141–147. [Google Scholar] [CrossRef]
- Valverde, G.; Terzija, V. Unscented Kalman filter for power system dynamic state estimation. IET Gener. Transm. Distrib. 2010, 5, 29–37. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Liu, C.; Peng, S. Maximum Correntropy with Variable Center Unscented Kalman Filter for Robust Power System State Estimation. Entropy 2022, 24, 516. https://doi.org/10.3390/e24040516
Sun Z, Liu C, Peng S. Maximum Correntropy with Variable Center Unscented Kalman Filter for Robust Power System State Estimation. Entropy. 2022; 24(4):516. https://doi.org/10.3390/e24040516
Chicago/Turabian StyleSun, Zhenglong, Chuanlin Liu, and Siyuan Peng. 2022. "Maximum Correntropy with Variable Center Unscented Kalman Filter for Robust Power System State Estimation" Entropy 24, no. 4: 516. https://doi.org/10.3390/e24040516
APA StyleSun, Z., Liu, C., & Peng, S. (2022). Maximum Correntropy with Variable Center Unscented Kalman Filter for Robust Power System State Estimation. Entropy, 24(4), 516. https://doi.org/10.3390/e24040516