
Design of Adaptive Fractional-Order Fixed-Time Sliding Mode Control for Robotic Manipulators


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- Based on the characteristics of fractional-order fixed-time non-singular terminal SMC, a sliding surface with good tracking performance, reduced control input chattering, and rapid convergence is designed.
- The fractional-order control is applied in an attempt to improve the performance of the closed system.
- It is proposed to use adaptive control with FoFxNTSM, so that the unknown dynamics are compensated for in order to produce the robust and sustainable performance for the PUMA 560 robotic manipulator.
- The Lyapunov theory is utilized in order to carry out an investigation into the system’s fixed-time stability.
2. Preliminaries
- a.
- b.
3. Fractional-Order Fixed-Time Non-Singular Terminal Sliding Control Design
3.1. FoFxNTSM Surface
3.2. FoFxNTSM Control Design
3.3. Stability Analysis
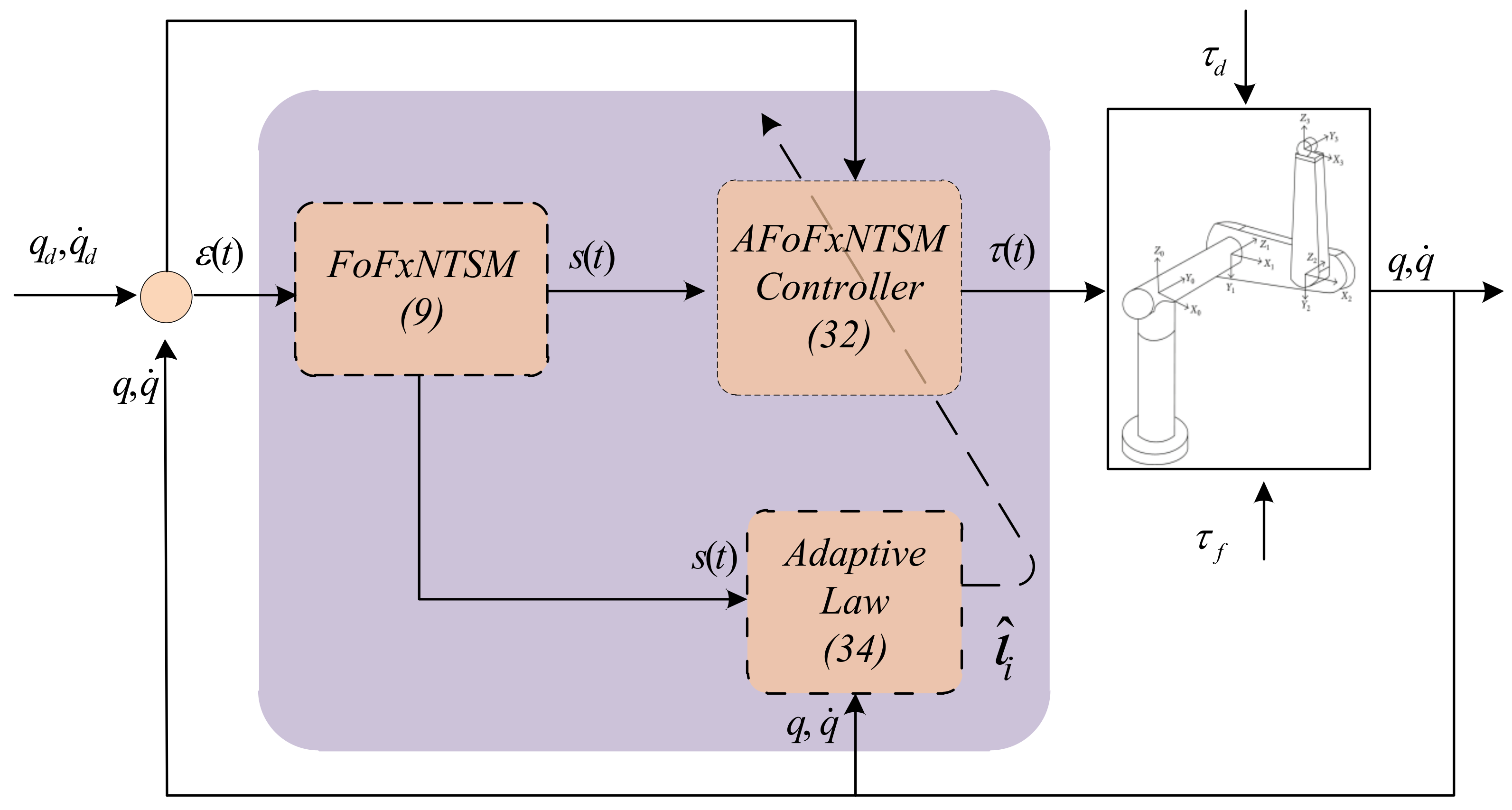
4. Adaptive FoFxNTSM Control Design
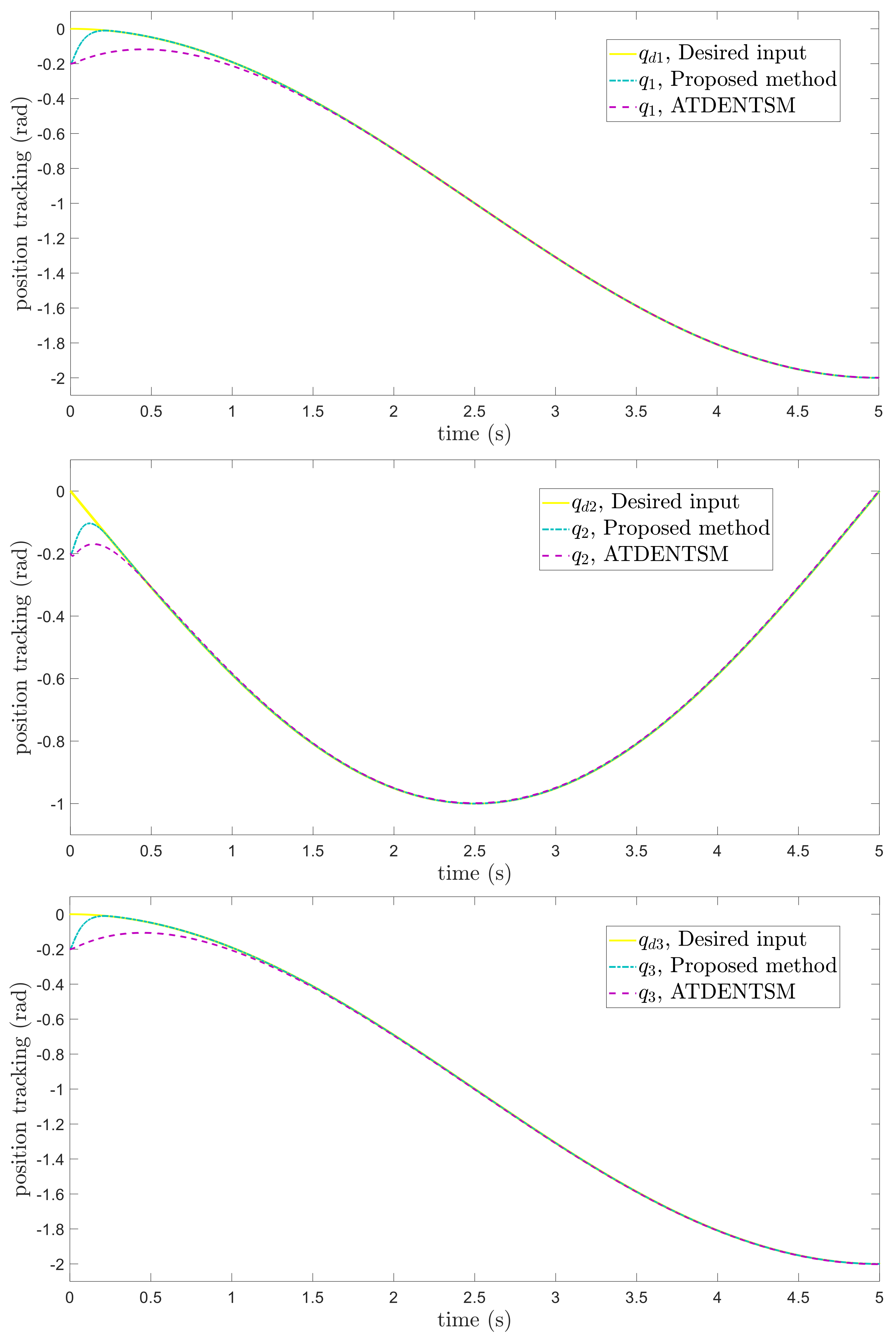
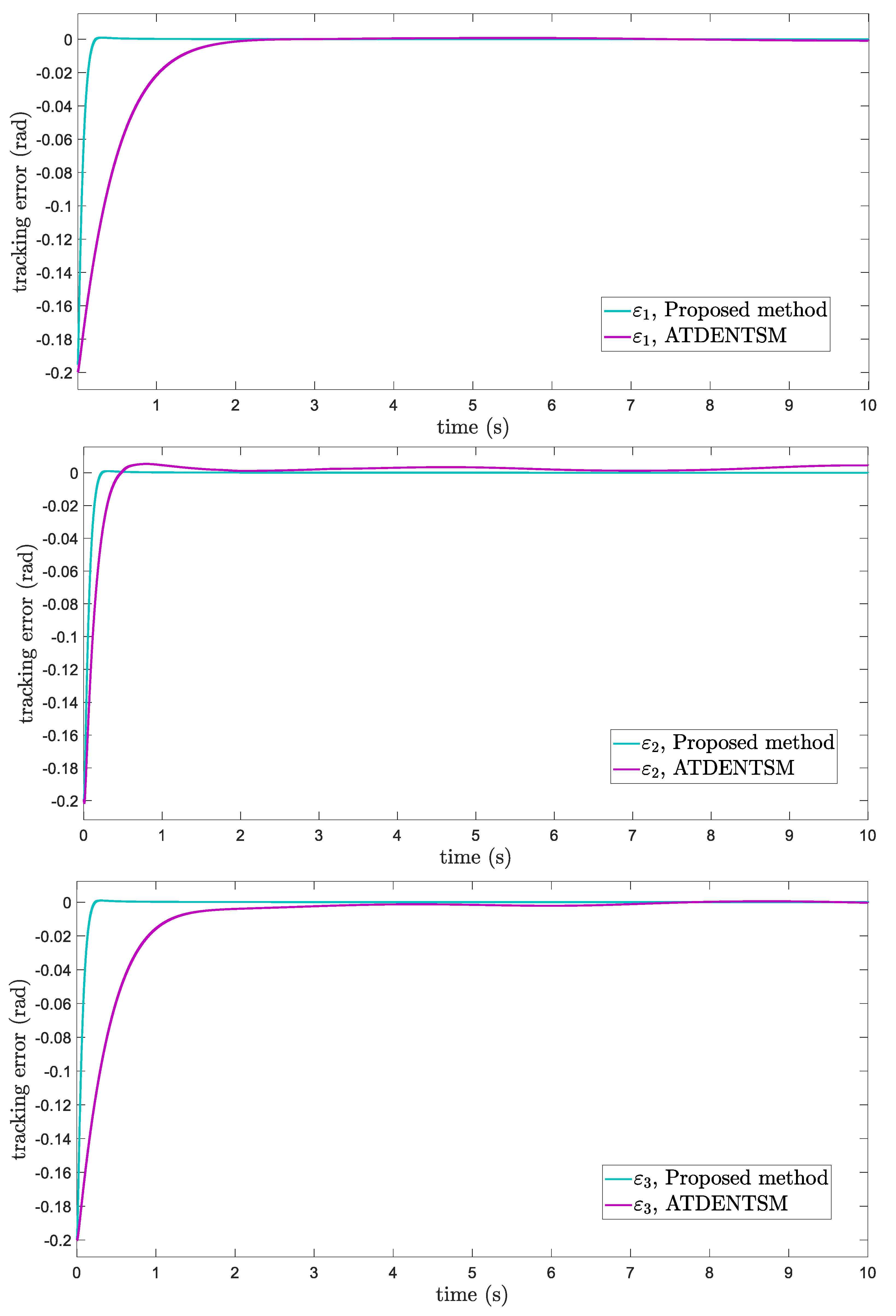
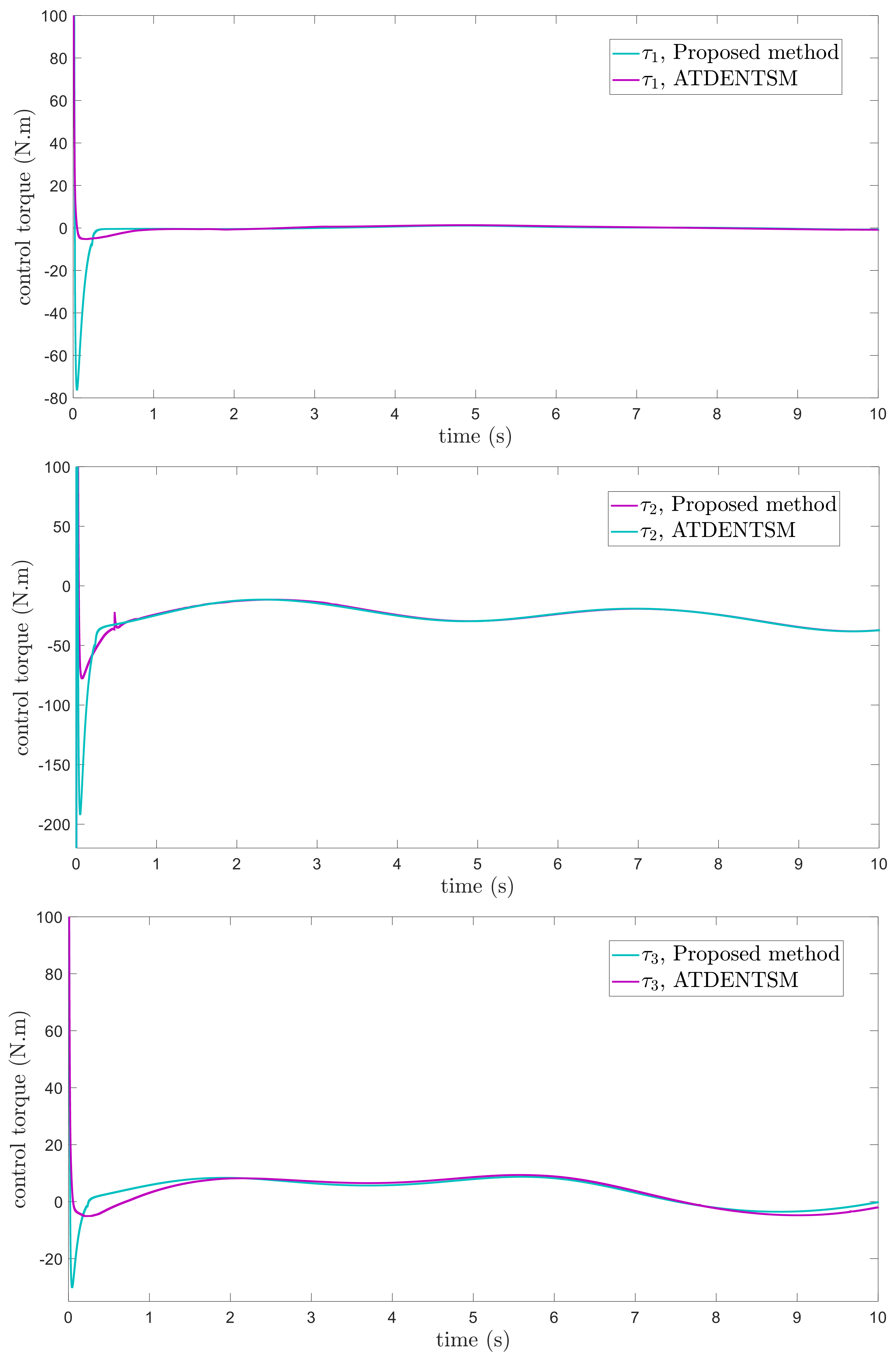
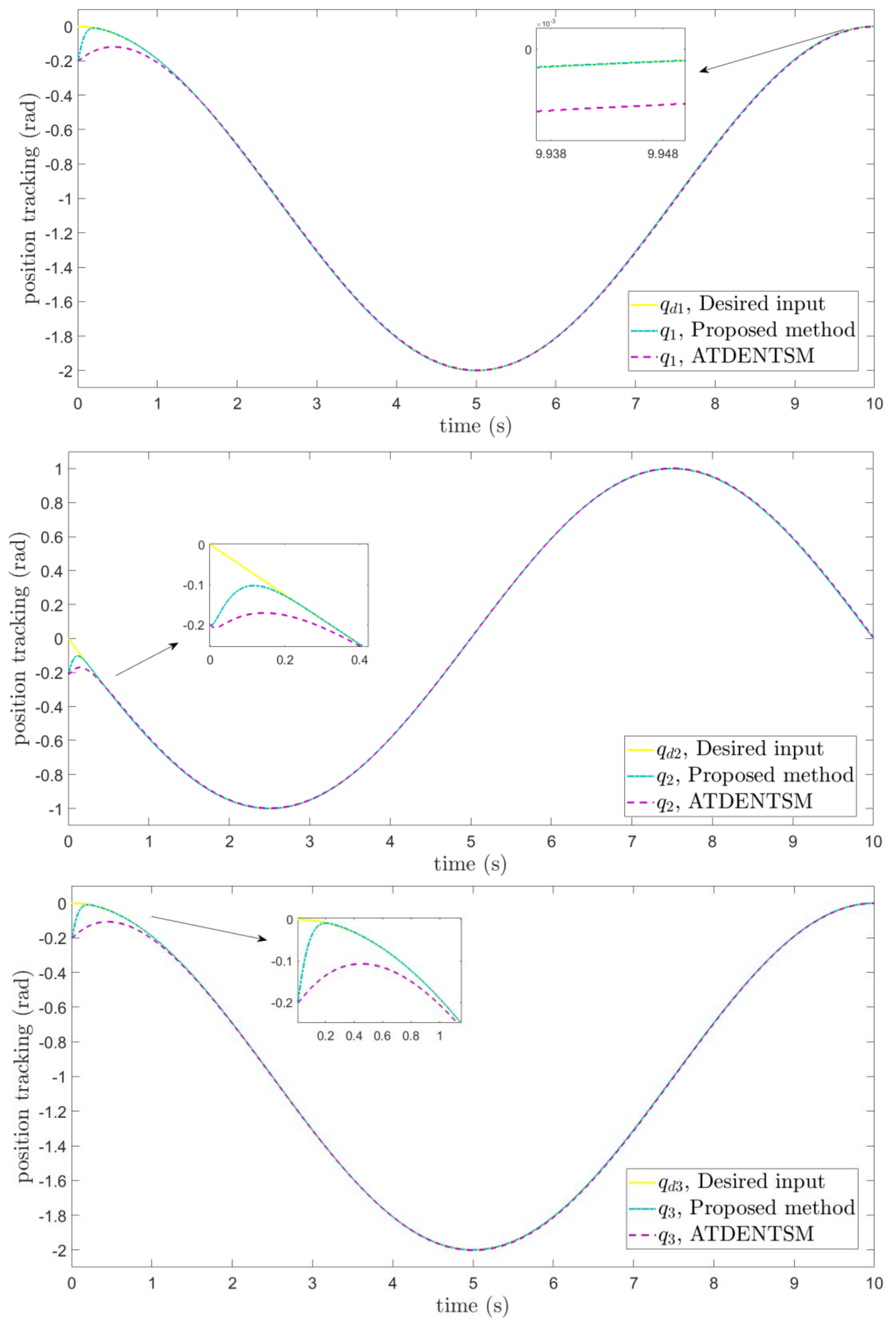
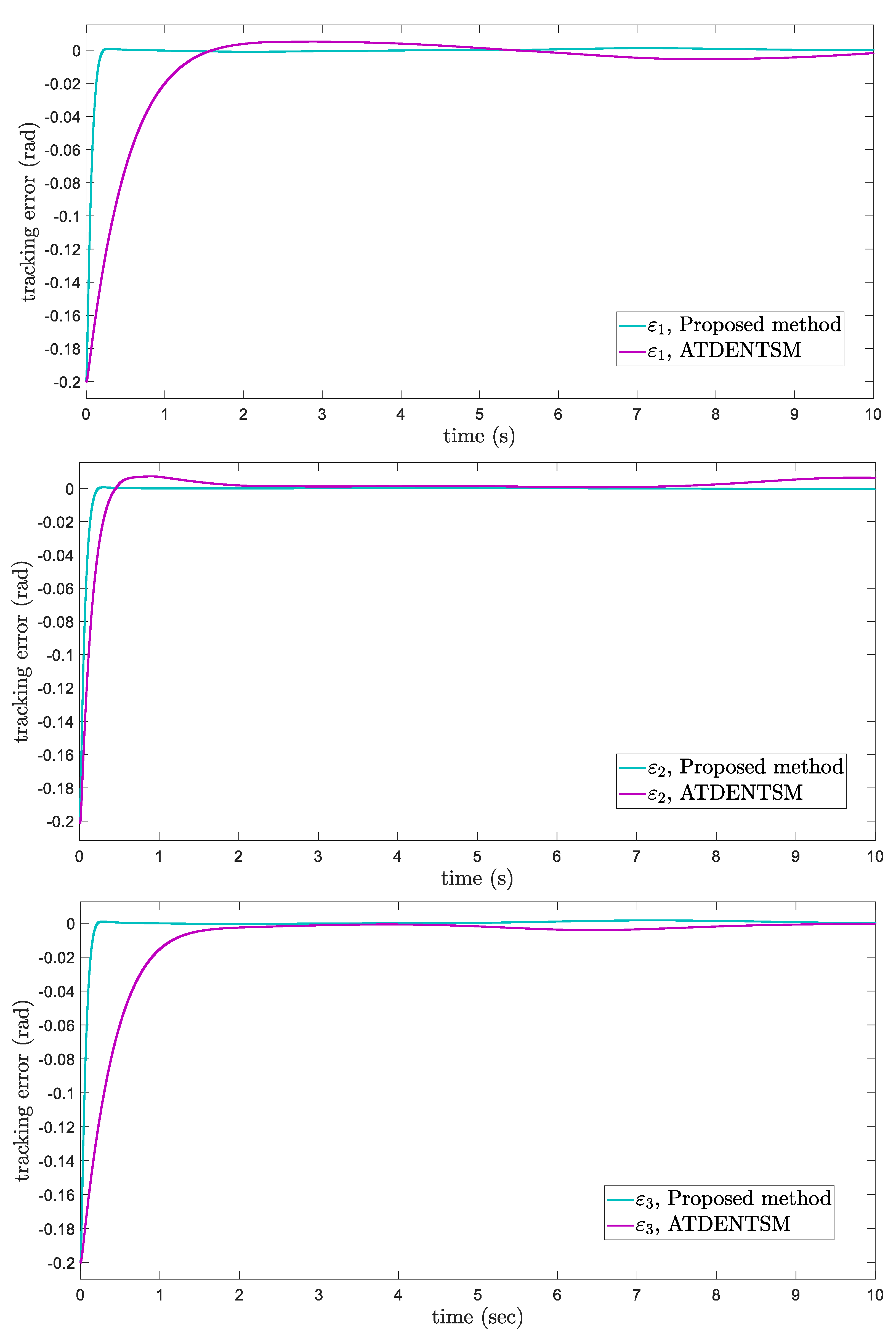
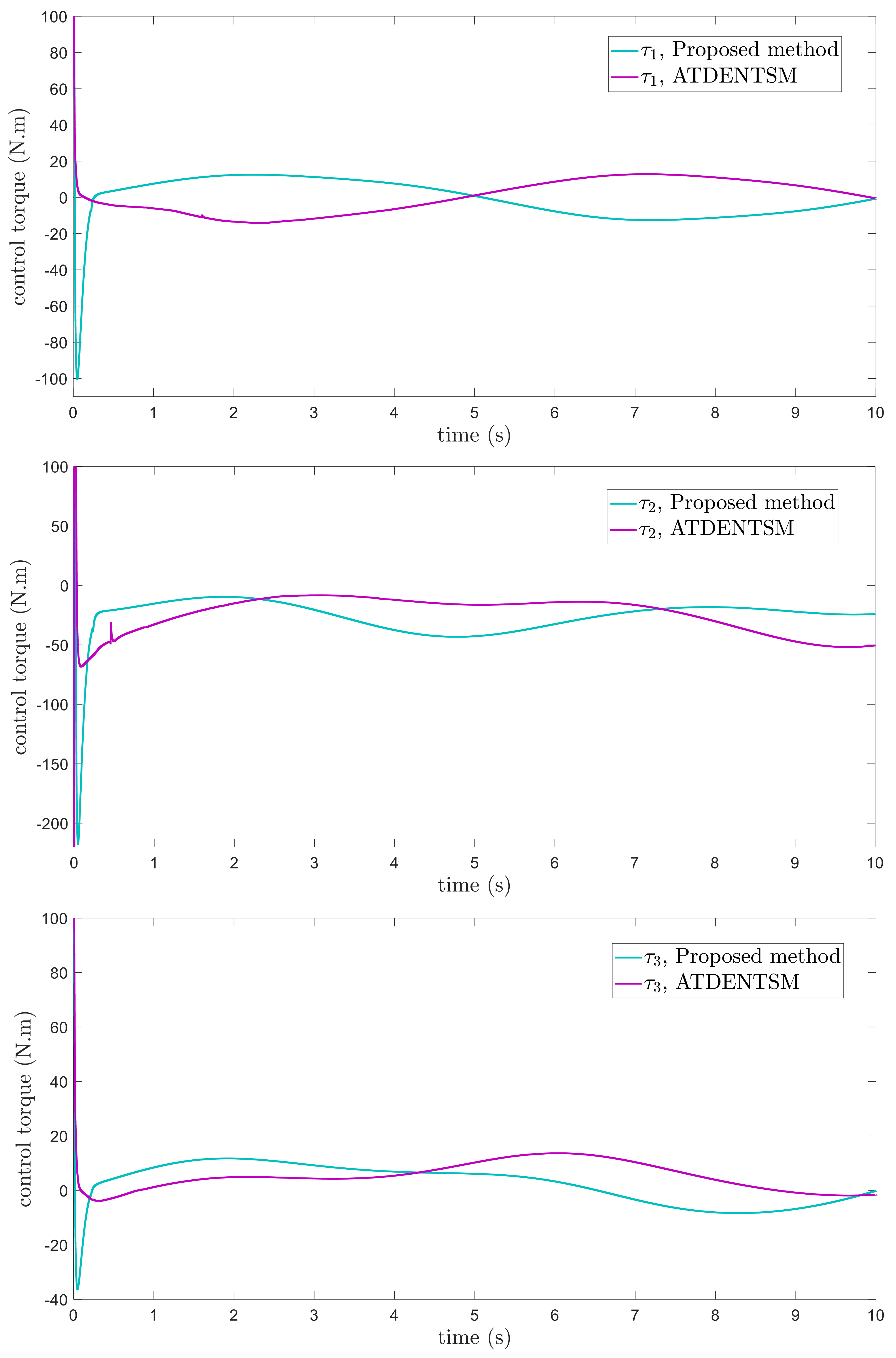
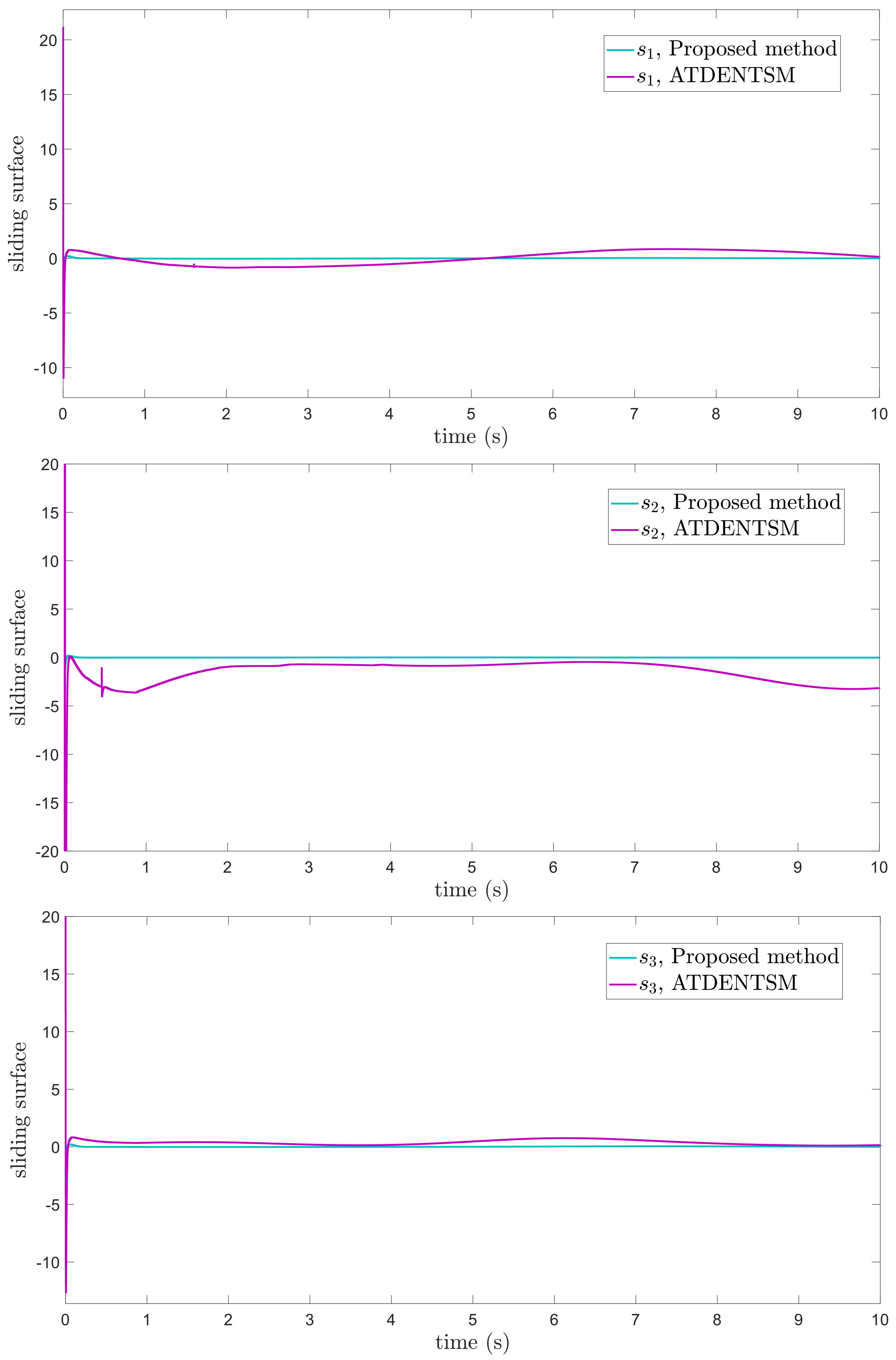
5. Simulation Results and Comparative Analyses
5.1. Case 1: Comparison for Nominal Plant
5.2. Case 2: Comparison under Unknown Dynamics
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ahmed, S.; Wang, H.; Tian, Y. Modification to model reference adaptive control of 5-link exoskeleton with gravity compensation. In Proceedings of the Chinese Control Conference, Chengdu, China, 27 July 2016; pp. 6115–6120. [Google Scholar]
- Hagh, Y.S.; Asl, R.M.; Cocquempot, V. A hybrid robust fault tolerant control based on adaptive joint unscented Kalman filter. ISA Trans. 2017, 66, 262–274. [Google Scholar] [CrossRef]
- Wang, N.; Ahn, C.K. Coordinated trajectory-tracking control of a marine aerial-surface heterogeneous system. IEEE/ASME Trans. Mechatron. 2021, 26, 3198–3210. [Google Scholar] [CrossRef]
- Zhao, D.; Li, S.; Gao, F. A new terminal sliding mode control for robotic manipulators. Int. J. Control 2009, 82, 1804–1813. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Yang, L.; Yang, J. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems. Int. J. Robust Nonlinear Control. 2011, 21, 1865–1879. [Google Scholar] [CrossRef]
- Moulay, E.; Lechappe, V.; Bernuau, E.; Defoort, M.; Plestan, F. Fixed-time sliding mode control with mismatched disturbances. Automatica 2022, 136, 110009. [Google Scholar] [CrossRef]
- Ton, C.; Petersen, C. Continuous fixed-time sliding mode control for spacecraft with flexible appendages. IFAC-PapersOnLine 2018, 51, 1–5. [Google Scholar] [CrossRef]
- Chavez-Vazquez, S.; Gomez-Aguilar, J.F.; Lavin-Delgado, J.E.; Escobar-Jimenez, R.F.; Olivares-Peregrino, V.H. Applications of fractional operators in robotics: A review. J. Intell. Robot. Syst. 2022, 104, 1–40. [Google Scholar] [CrossRef]
- Ouannas, A.; Azar, A.T.; Ziar, T. On Inverse Full State Hybrid Function Projective Synchronization for Continuous-time Chaotic Dynamical Systems with Arbitrary Dimensions. Differ. Equ. Dyn. Syst. 2020, 28, 1045–1058. [Google Scholar] [CrossRef]
- Ouannas, A.; Azar, A.T.; Ziar, T.; Radwan, A.G. Generalized Synchronization of Different Dimensional Integer-Order and Fractional Order Chaotic Systems; Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2017; Volume 688, pp. 671–697. [Google Scholar]
- Azar, A.T.; Radwan, A.G.; Vaidyanathan, S. Mathematical Techniques of Fractional Order Systems; Elsevier: Amsterdam, The Netherlands, 2018; ISBN 9780128135921. [Google Scholar]
- Azar, A.T.; Radwan, A.G.; Vaidyanathan, S. Fractional Order Systems: Optimization, Control, Circuit Realizations and Applications; Elsevier: Amsterdam, The Netherlands, 2018; ISBN 9780128161524. [Google Scholar]
- Zhang, Q.; Li, Y.; Shang, Y.; Duan, B.; Cui, N.; Zhang, C. A fractional-Order kinetic battery model of lithium-Ion batteries considering a nonlinear capacity. Electronics 2019, 8, 394. [Google Scholar] [CrossRef]
- Magin, R. Fractional calculus in bioengineering, part 1. Crit. Rev. Biomed. Eng. 2004, 32. [Google Scholar]
- Tarasov, V.E. Mathematical economics: Application of fractional calculus. Mathematics 2020, 8, 660. [Google Scholar] [CrossRef]
- Tapadar, A.; Khanday, F.A.; Sen, S.; Adhikary, A. Fractional calculus in electronic circuits: A review. Fract. Order Syst. 2022, 1, 441–482. [Google Scholar]
- Radwan, A.G.; Emira, A.A.; Abdelaty, A.; Azar, A.T. Modeling and Analysis of Fractional Order DC-DC Converter. ISA Trans. 2018, 82, 184–199. [Google Scholar] [CrossRef] [PubMed]
- Meghni, B.; Dib, D.; Azar, A.T.; Ghoudelbourk, S.; Saadoun, A. Robust Adaptive Supervisory Fractional order Controller For optimal Energy Management in Wind Turbine with Battery Storage; Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2017; Volume 688, pp. 165–202. [Google Scholar]
- Ouannas, A.; Azar, A.T.; Ziar, T.; Vaidyanathan, S. Fractional Inverse Generalized Chaos Synchronization Between Different Dimensional Systems; Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2017; Volume 688, pp. 525–551. [Google Scholar]
- Ouannas, A.; Azar, A.T.; Ziar, T.; Vaidyanathan, S. A New Method To Synchronize Fractional Chaotic Systems With Different Dimensions; Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2017; Volume 688, pp. 581–611. [Google Scholar]
- Ibraheem, G.A.R.; Azar, A.T.; Ibraheem, I.K.; Humaidi, A.J. A Novel Design of a Neural Network based Fractional PID Controller for Mobile Robots Using Hybridized Fruit Fly and Particle Swarm Optimization. Complexity 2020, 2020, 1–18. [Google Scholar] [CrossRef]
- Gorripotu, T.S.; Samalla, H.; Jagan Mohana Rao, C.; Azar, A.T.; Pelusi, D. TLBO Algorithm optimized fractional-order PID controller for AGC of interconnected power system. In Soft Computing in Data Analytics. Advances in Intelligent Systems and Computing; Nayak, J., Abraham, A., Krishna, B., Chandra Sekhar, G., Das, A., Eds.; Springer: Singapore, 2019; Volume 758, pp. 847–855. [Google Scholar]
- Daraz, A.; Malik, S.A.; Azar, A.T.; Aslam, S.; Alkhalifah, T.; Alturise, F. Optimized Fractional Order Integral-Tilt Derivative Controller for Frequency Regulation of Interconnected Diverse Renewable Energy Resources. IEEE Access 2022, 10, 43514–43527. [Google Scholar] [CrossRef]
- Ahmed, S.; Wang, H.; Tian, Y. Fault tolerant control using fractional-order terminal sliding mode control for robotic manipulators. Stud. Inform. Control. 2018, 27, 55–64. [Google Scholar] [CrossRef]
- Abro, G.E.M.; Zulkifli, S.A.B.; Asirvadam, V.S.; Ali, Z.A. Model-free-based single-dimension fuzzy SMC design for underactuated quadrotor UAV. Actuators 2021, 10, 191. [Google Scholar] [CrossRef]
- Tepljakov, A.; Alagoz, B.B.; Yeroglu, C.; Gonzalez, E.; HosseinNia, S.H.; Petlenkov, E. FOPID controllers and their industrial applications: A survey of recent results. IFAC-PapersOnLine 2018, 51, 25–30. [Google Scholar] [CrossRef]
- Fei, J.; Wang, H.; Fang, Y. Novel neural network fractional-order sliding-mode control with application to active power filter. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 3508–3518. [Google Scholar] [CrossRef]
- Zheng, W.; Luo, Y.; Chen, Y.; Wang, X. A simplified fractional order PID controller’s optimal tuning: A case study on a PMSM speed servo. Entropy 2021, 23, 130. [Google Scholar] [CrossRef]
- Dadras, S.; Momeni, H.R. Fractional terminal sliding mode control design for a class of dynamical systems with uncertainty. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 367–377. [Google Scholar] [CrossRef]
- Ahmed, S.; Ahmed, A.; Mansoor, I.; Junejo, F.; Saeed, A. Output feedback adaptive fractional-order super-twisting sliding mode control of robotic manipulator. Iran. J. Sci. Technol. Trans. Electr. Eng. 2021, 45, 335–347. [Google Scholar] [CrossRef]
- Fei, J.; Wang, Z.; Liang, X. Robust adaptive fractional fast terminal sliding mode controller for microgyroscope. Complexity 2020, 2020. [Google Scholar] [CrossRef]
- Ni, J.; Liu, L.; Liu, C.; Hu, X. Fractional order fixed-time nonsingular terminal sliding mode synchronization and control of fractional order chaotic systems. Nonlinear Dyn. 2017, 89, 2065–2083. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, J.; Li, Z. A novel fixed-time trajectory tracking strategy of unmanned surface vessel based on the fractional sliding mode control method. Electronics 2022, 11, 726. [Google Scholar] [CrossRef]
- Labbadi, M.; Boubaker, S.; Djemai, M.; Mekni, S.K.; Bekrar, A. Fixed-Time Fractional-Order Global Sliding Mode Control for Nonholonomic Mobile Robot Systems under External Disturbances. Fractal Fract. 2022, 6, 177. [Google Scholar] [CrossRef]
- Huang, S.; Xiong, L.; Wang, J.; Li, P.; Wang, Z.; Ma, M. Fixed-time fractional-order sliding mode controller for multimachine power systems. IEEE Trans. Power Syst. 2020, 36, 2866–2876. [Google Scholar] [CrossRef]
- Tao, G. Multivariable adaptive control: A survey. Automatica 2014, 50, 2737–2764. [Google Scholar] [CrossRef]
- Wang, N.; Qian, C.; Sun, J.C.; Liu, Y.C. Adaptive robust finite-time trajectory tracking control of fully actuated marine surface vehicles. IEEE Trans. Control. Syst. Technol. 2015, 24, 1454–1462. [Google Scholar] [CrossRef]
- Wang, N.; Su, S.F.; Han, M.; Chen, W.H. Backpropagating constraints-based trajectory tracking control of a quadrotor with constrained actuator dynamics and complex unknowns. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 1322–1337. [Google Scholar] [CrossRef]
- Lavretsky, E.; Wise, K.A. Robust Adaptive Control; Springer: London, UK, 2013; pp. 317–353. [Google Scholar]
- Tian, X.; Fei, S. Robust control of a class of uncertain fractional-order chaotic systems with input nonlinearity via an adaptive sliding mode technique. Entropy 2014, 16, 729–746. [Google Scholar] [CrossRef]
- Zhang, X.; Quan, Y. Adaptive fractional-order non-singular fast terminal sliding mode control based on fixed time disturbance observer for manipulators. IEEE Access 2022, 10, 76504–76511. [Google Scholar] [CrossRef]
- Lopes, A.M.; Machado, J.A.T. A review of fractional order entropies. Entropy 2020, 22, 1374. [Google Scholar] [CrossRef]
- Zhai, J.; Li, Z. Fast-exponential sliding mode control of robotic manipulator with super-twisting method. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 489–493. [Google Scholar] [CrossRef]
- Yin, C.; Huang, X.; Chen, Y.; Dadras, S.; Zhong, S.M.; Cheng, Y. Fractional-order exponential switching technique to enhance sliding mode control. Appl. Math. Model. 2017, 44, 705–726. [Google Scholar] [CrossRef]
- Ahmed, S. Robust model reference adaptive control for five-link robotic exoskeleton. Int. J. Model. Identif. Control. 2021, 39, 324–331. [Google Scholar] [CrossRef]
- Han, Z.; Zhang, K.; Yang, T.; Zhang, M. Spacecraft fault-tolerant control using adaptive non-singular fast terminal sliding mode. IET Control Theory Appl. 2010, 10, 1991–1999. [Google Scholar] [CrossRef]
- Armstrong, B.; Khatib, O.; Burdick, J. The explicit dynamic model and inertial parameters of the PUMA 560 arm. In Proceedings of the 1986 IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 7–10 April 1986; Volume 3, pp. 510–518. [Google Scholar]
- Ahmed, S.; Wang, H.; Tian, Y. Adaptive high-order terminal sliding mode control based on time delay estimation for the robotic manipulators with backlash hysteresis. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 1128–1137. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, S.; Azar, A.T.; Tounsi, M. Design of Adaptive Fractional-Order Fixed-Time Sliding Mode Control for Robotic Manipulators. Entropy 2022, 24, 1838. https://doi.org/10.3390/e24121838
Ahmed S, Azar AT, Tounsi M. Design of Adaptive Fractional-Order Fixed-Time Sliding Mode Control for Robotic Manipulators. Entropy. 2022; 24(12):1838. https://doi.org/10.3390/e24121838
Chicago/Turabian StyleAhmed, Saim, Ahmad Taher Azar, and Mohamed Tounsi. 2022. "Design of Adaptive Fractional-Order Fixed-Time Sliding Mode Control for Robotic Manipulators" Entropy 24, no. 12: 1838. https://doi.org/10.3390/e24121838
APA StyleAhmed, S., Azar, A. T., & Tounsi, M. (2022). Design of Adaptive Fractional-Order Fixed-Time Sliding Mode Control for Robotic Manipulators. Entropy, 24(12), 1838. https://doi.org/10.3390/e24121838