
Fusion Domain-Adaptation CNN Driven by Images and Vibration Signals for Fault Diagnosis of Gearbox Cross-Working Conditions



Abstract
:1. Introduction
- (1)
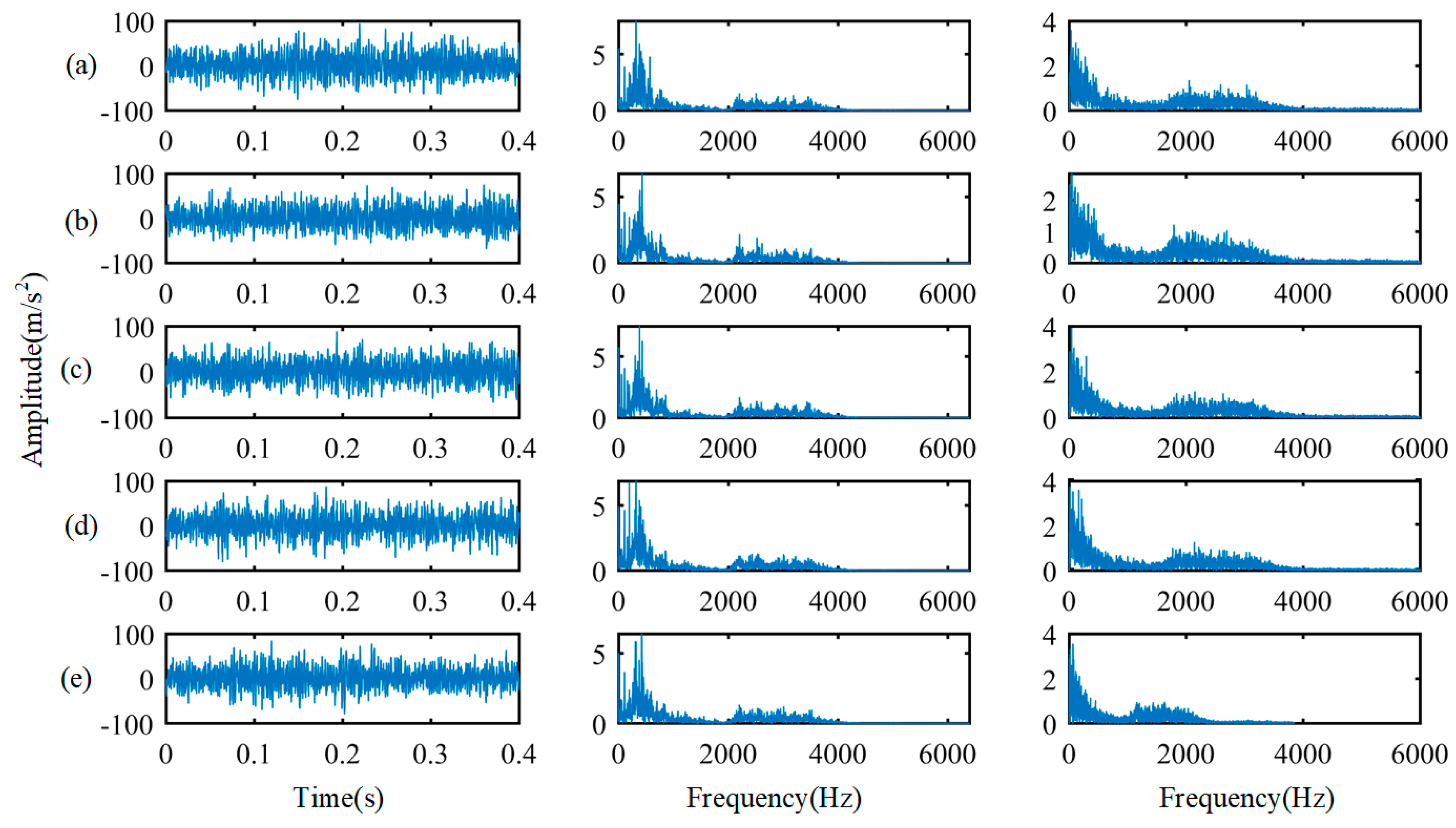
- A data-level multi-source heterogeneous fusion scheme is proposed. The frequency and squared envelope spectrum can more clearly reflect fault information contained in the vibration signal. The fusion of the preprocessed vibration signal and the infrared thermal image makes the fault information in the training sample more abundant and obvious.
- (2)
- A fusion domain-adaptation CNN fault diagnosis method for gearboxes is explored. It can extract domain invariant features from the fusion information of vibration signals and infrared thermal images and implement gearbox fault diagnosis in an unlabeled target domain.
2. Preliminaries
2.1. Squared Envelope Spectrum
2.2. Convolutional Neural Network
2.3. Deep Adversarial Convolution Neural Network
3. The Proposed Method
3.1. Data-Level Fusion
3.2. Fusion Domain-Adaptation CNN Construction
3.3. Procedures of Proposed Fusion Domain-Adaptation CNN
4. Experimental and Result Discussion
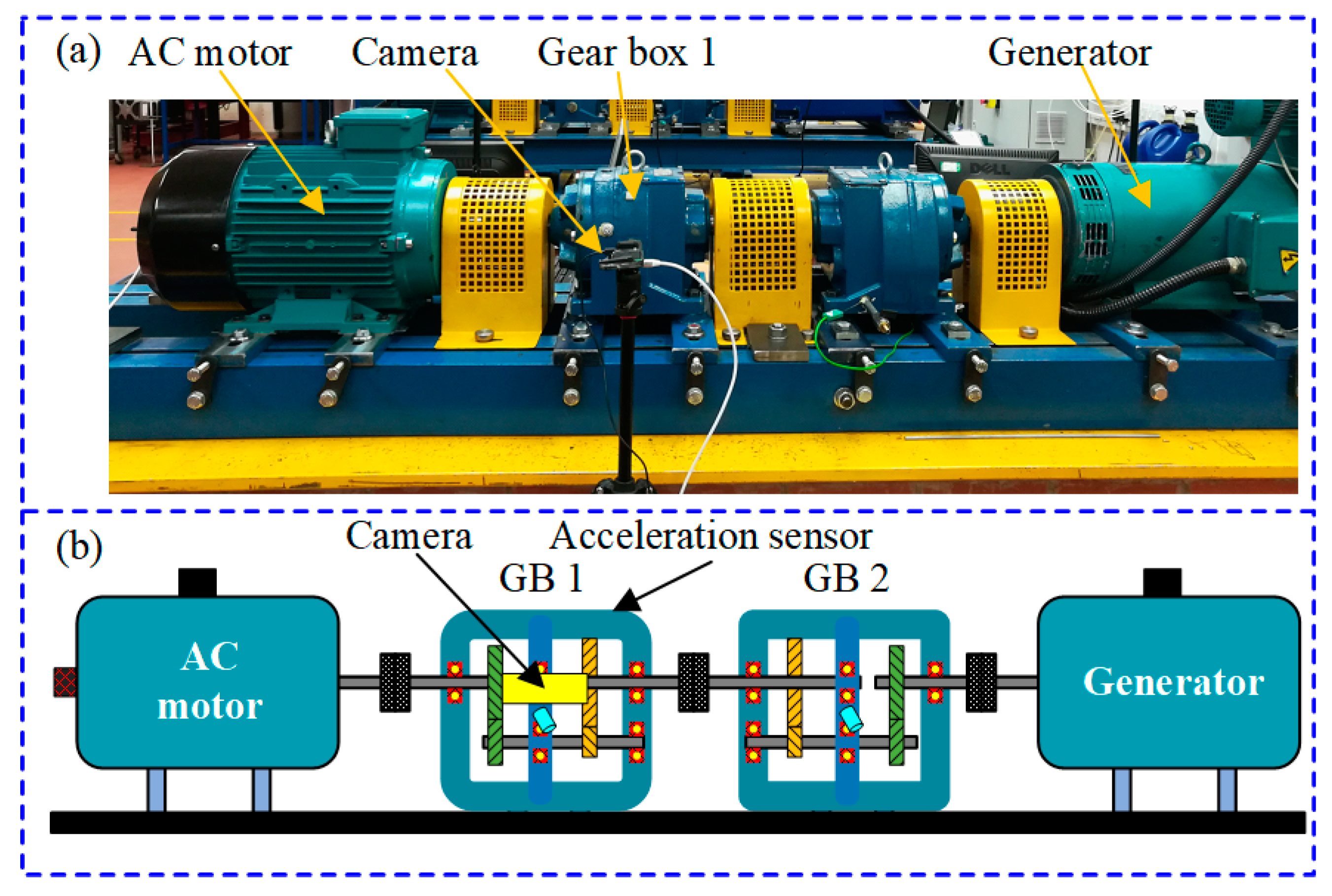
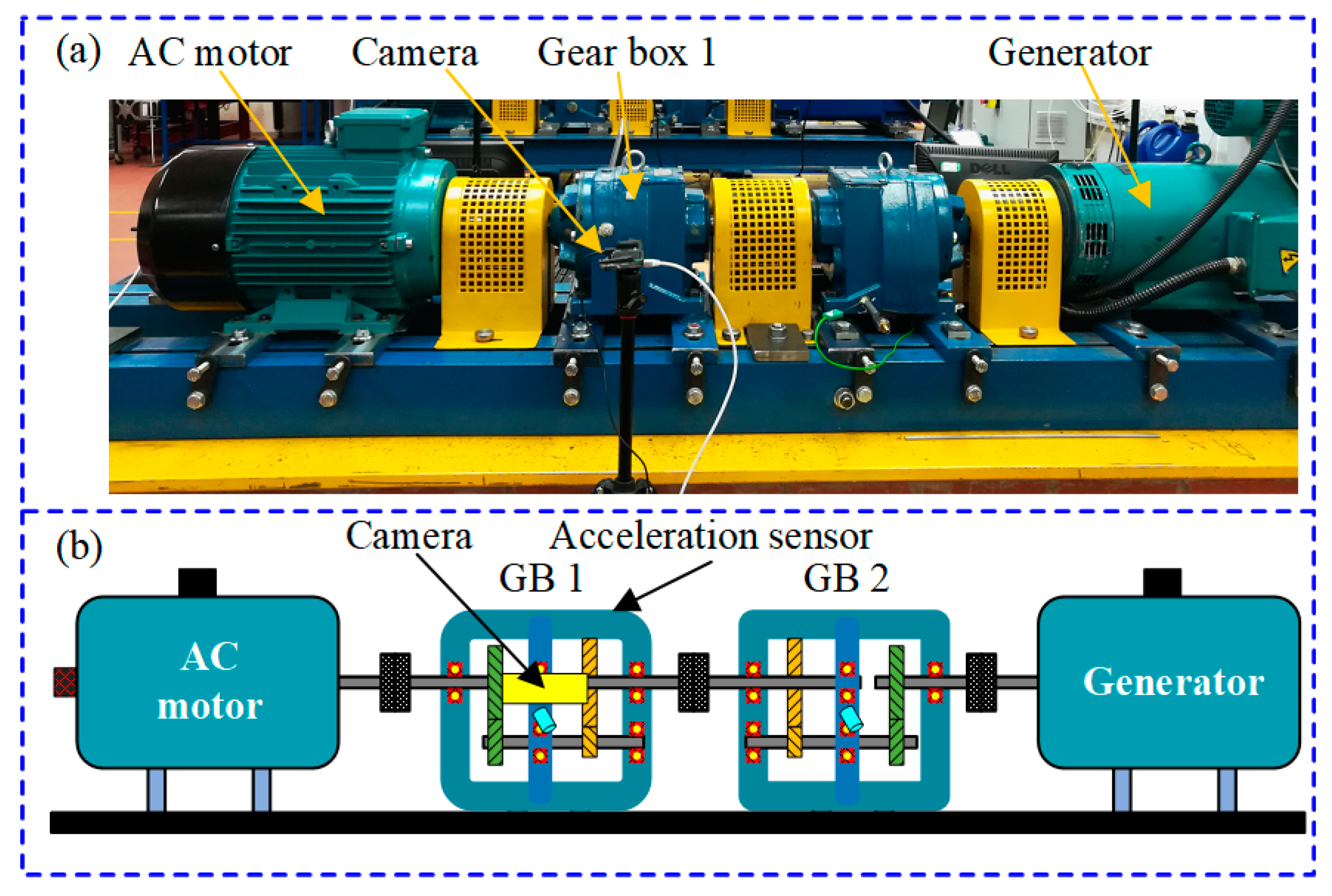
4.1. Dataset Descriptions
4.2. Implementation Details
4.3. Methods Comparison and Results Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kong, X.; Mao, G.; Wang, Q.; Ma, H.; Yang, W. A multi-ensemble method based on deep auto-encoders for fault diagnosis of rolling bearings. Measurement 2020, 151, 107132. [Google Scholar] [CrossRef]
- Karabacak, Y.E.; Özmen, N.G.; Gümüşel, L. Intelligent worm gearbox fault diagnosis under various working conditions using vibration, sound and thermal features. Appl. Acoust. 2022, 186, 108463. [Google Scholar] [CrossRef]
- Miao, Y.; Zhang, B.; Lin, J.; Zhao, M.; Liu, H.; Liu, Z.; Li, H. A review on the application of blind deconvolution in machinery fault diagnosis. Mech. Syst. Signal Process. 2022, 163, 108202. [Google Scholar] [CrossRef]
- Shi, J.; Peng, D.; Peng, Z.; Zhang, Z.; Goebel, K.; Wu, D. Planetary gearbox fault diagnosis using bidirectional-convolutional LSTM networks. Mech. Syst. Signal Process. 2022, 162, 107996. [Google Scholar] [CrossRef]
- Liu, H.; Zhou, J.; Zheng, Y.; Jiang, W.; Zhang, Y. Fault diagnosis of rolling bearings with recurrent neural network-based autoencoders. ISA Trans. 2018, 77, 167–178. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Li, C.; Peng, G.; Chen, Y.; Zhang, Z. A deep convolutional neural network with new training methods for bearing fault diagnosis under noisy environment and different working load. Mech. Syst. Signal Process. 2018, 100, 439–453. [Google Scholar] [CrossRef]
- Yu, J.; Liu, X. One-dimensional residual convolutional auto-encoder for fault detection in complex industrial processes. Int. J. Prod. Res. 2021, 196, 1–20. [Google Scholar] [CrossRef]
- Li, D.; Zhang, M.; Kang, T.; Li, B.; Xiang, H.; Wang, K.; Pei, Z.; Tang, X.; Wang, P. Fault diagnosis of rotating machinery based on dual convolutional-capsule network (DC-CN). Measurement 2022, 187, 110258. [Google Scholar] [CrossRef]
- Zhu, J.; Chen, N.; Peng, W. Estimation of bearing remaining useful life based on multiscale convolutional neural network. IEEE Trans. Ind. Electron. 2019, 66, 3208–3216. [Google Scholar] [CrossRef]
- Yao, D.; Liu, H.; Yang, J.; Li, X. A lightweight neural network with strong robustness for bearing fault diagnosis. Measurement 2020, 159, 107756. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Lin, Y.; Li, X. A novel method for intelligent fault diagnosis of rolling bearings using ensemble deep auto-encoders. Mech. Syst. Signal Process. 2018, 102, 278–297. [Google Scholar] [CrossRef]
- Guo, L.; Lei, Y.; Xing, S.; Yan, T.; Li, N. Deep Convolutional Transfer Learning Network: A New Method for Intelligent Fault Diagnosis of Machines with Unlabeled Data. IEEE Trans. Ind. Electron. 2019, 66, 7316–7325. [Google Scholar] [CrossRef]
- Han, T.; Liu, C.; Yang, W.; Jiang, D. A novel adversarial learning framework in deep convolutional neural network for intelligent diagnosis of mechanical faults. Knowl. Based Syst. 2019, 165, 474–487. [Google Scholar] [CrossRef]
- Qian, W.; Li, S.; Wang, J.; Xin, Y.; Ma, H. A New Deep Transfer Learning Network for Fault Diagnosis of Rotating Machine Under Variable Working Conditions. In Proceedings of the 2018 Prognostics and System Health Management Conference (PHM-Chongqing), Chongqing, China, 26–28 October 2018; pp. 1010–1016. [Google Scholar]
- Chen, Z.; Gryllias, K.; Li, W. Intelligent Fault Diagnosis for Rotary Machinery Using Transferable Convolutional Neural Network. IEEE Trans. Ind. Inform. 2019, 16, 339–349. [Google Scholar] [CrossRef]
- Yang, B.; Lei, Y.; Jia, F.; Xing, S. An intelligent fault diagnosis approach based on transfer learning from laboratory bearings to locomotive bearings. Mech. Syst. Signal Process. 2019, 122, 692–706. [Google Scholar] [CrossRef]
- Xu, K.; Li, S.; Wang, J.; An, Z.; Qian, W.; Ma, H. A novel convolutional transfer feature discrimination network for imbalanced fault diagnosis under variable rotational speed. Meas. Sci. Technol. 2019, 30, 105107. [Google Scholar] [CrossRef]
- Wen, L.; Gao, L.; Li, X. A new deep transfer learning based on sparse auto-encoder for fault diagnosis. IEEE Trans. Syst. Man Cybern.-Syst. 2017, 49, 136–144. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, D.; Lu, W.; Yang, J.; Li, Z.; Liang, B. A Deep Transfer Model With Wasserstein Distance Guided Multi-Adversarial Networks for Bearing Fault Diagnosis under Different Working Conditions. IEEE Access 2019, 7, 65303–65318. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, X.; Wen, L.; Gao, L.; Gao, Y. Fault Diagnosis Using Unsupervised Transfer Learning Based on Adversarial Network. In Proceedings of the 2019 IEEE 15th International Conference on Automation Science and Engineering (CASE), Vancouver, BC, Canada, 22–26 August 2019; pp. 305–310. [Google Scholar]
- Zhang, B.; Li, W.; Hao, J.; Li, X.-L.; Zhang, M. Adversarial adaptive 1-D convolutional neural networks for bearing fault diagnosis under varying working condition. arXiv 2018, arXiv:1805.00778. [Google Scholar]
- Wang, B.; Shen, C.; Yu, C.; Yang, Y. Data Fused Motor Fault Identification Based on Adversarial Auto-Encoder. In Proceedings of the 2019 IEEE 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Xi’an, China, 3–6 June 2019; pp. 299–305. [Google Scholar]
- Yang, S.; Kong, X.; Wang, Q.; Li, Z.; Cheng, H.; Yu, L. A multi-source ensemble domain adaptation method for rotary machine fault diagnosis. Measurement 2021, 186, 110213. [Google Scholar] [CrossRef]
- He, Z.; Shao, H.; Zhong, X.; Zhao, X. Ensemble transfer CNNs driven by multi-channel signals for fault diagnosis of rotating machinery cross working conditions. Knowl. Based Syst. 2020, 207, 106396. [Google Scholar] [CrossRef]
- Shi, Y.; Deng, A.; Ding, X.; Zhang, S.; Xu, S.; Li, J. Multisource domain factorization network for cross-domain fault diagnosis of rotating machinery: An unsupervised multisource domain adaptation method. Mech. Syst. Signal Process. 2022, 164, 108219. [Google Scholar] [CrossRef]
- Xin, L.; Haidong, S.; Hongkai, J.; Jiawei, X. Modified Gaussian convolutional deep belief network and infrared thermal imaging for intelligent fault diagnosis of rotor-bearing system under time-varying speeds. Struct. Health Monit. 2021, 99, 8957. [Google Scholar] [CrossRef]
- Choudhary, A.; Mian, T.; Fatima, S. Convolutional neural network based bearing fault diagnosis of rotating machine using thermal images. Measurement 2021, 176, 109196. [Google Scholar] [CrossRef]
- Jia, Z.; Liu, Z.; Vong, C.-M.; Pecht, M. A rotating machinery fault diagnosis method based on feature learning of thermal images. IEEE Access 2019, 7, 12348–12359. [Google Scholar] [CrossRef]
- Bai, T.; Yang, J.; Yao, D.; Wang, Y. Information Fusion of Infrared Images and Vibration Signals for Coupling Fault Diagnosis of Rotating Machinery. Shock. Vib. 2021, 2021, 6622041. [Google Scholar] [CrossRef]
- Di, Z.; Shao, H.; Xiang, J. Ensemble deep transfer learning driven by multisensor signals for the fault diagnosis of bevel-gear cross-operation conditions. Sci. China Technol. Sci. 2021, 64, 481–492. [Google Scholar] [CrossRef]
- Xu, L.; Chatterton, S.; Pennacchi, P. Rolling element bearing diagnosis based on singular value decomposition and composite squared envelope spectrum. Mech. Syst. Signal Process. 2021, 148, 107174. [Google Scholar] [CrossRef]
- Kia, S.H.; Henao, H.; Capolino, G.-A. Efficient digital signal processing techniques for induction machines fault diagnosis. In Proceedings of the 2013 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Paris, France, 11–12 March 2013; pp. 232–246. [Google Scholar]
- Li, Y.; Gu, J.X.; Zhen, D.; Xu, M.; Ball, A. An evaluation of gearbox condition monitoring using infrared thermal images applied with convolutional neural networks. Sensors 2019, 19, 2205. [Google Scholar] [CrossRef] [Green Version]
- Yongbo, L.; Xiaoqiang, D.; Fangyi, W.; Xianzhi, W.; Huangchao, Y. Rotating machinery fault diagnosis based on convolutional neural network and infrared thermal imaging. Chin. J. Aeronaut. 2020, 33, 427–438. [Google Scholar]
- Ganin, Y.; Ustinova, E.; Ajakan, H.; Germain, P.; Larochelle, H.; Laviolette, F.; Marchand, M.; Lempitsky, V. Domain-adversarial training of neural networks. J. Mach. Learn. Res. 2016, 17, 2030–2096. [Google Scholar]
- Lu, W.; Liang, B.; Cheng, Y.; Meng, D.; Yang, J.; Zhang, T. Deep model based domain adaptation for fault diagnosis. IEEE Trans. Ind. Electron. 2016, 64, 2296–2305. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Alg type | PHE |
| Frame rate | 25 fps |
| Temperate measurement range | −25 °C~260 °C |
| Environment temperature | 18.9 °C |
| Thermal sensitivity | 0.050 °C |
| Image resolution | 384 × 288 |
| Contrast | 50 |
| Brightness | 50 |
| Gain | 2 |
| Palette | rainbow |
| Label | Health States | The Number of Training/Testing Samples |
|---|---|---|
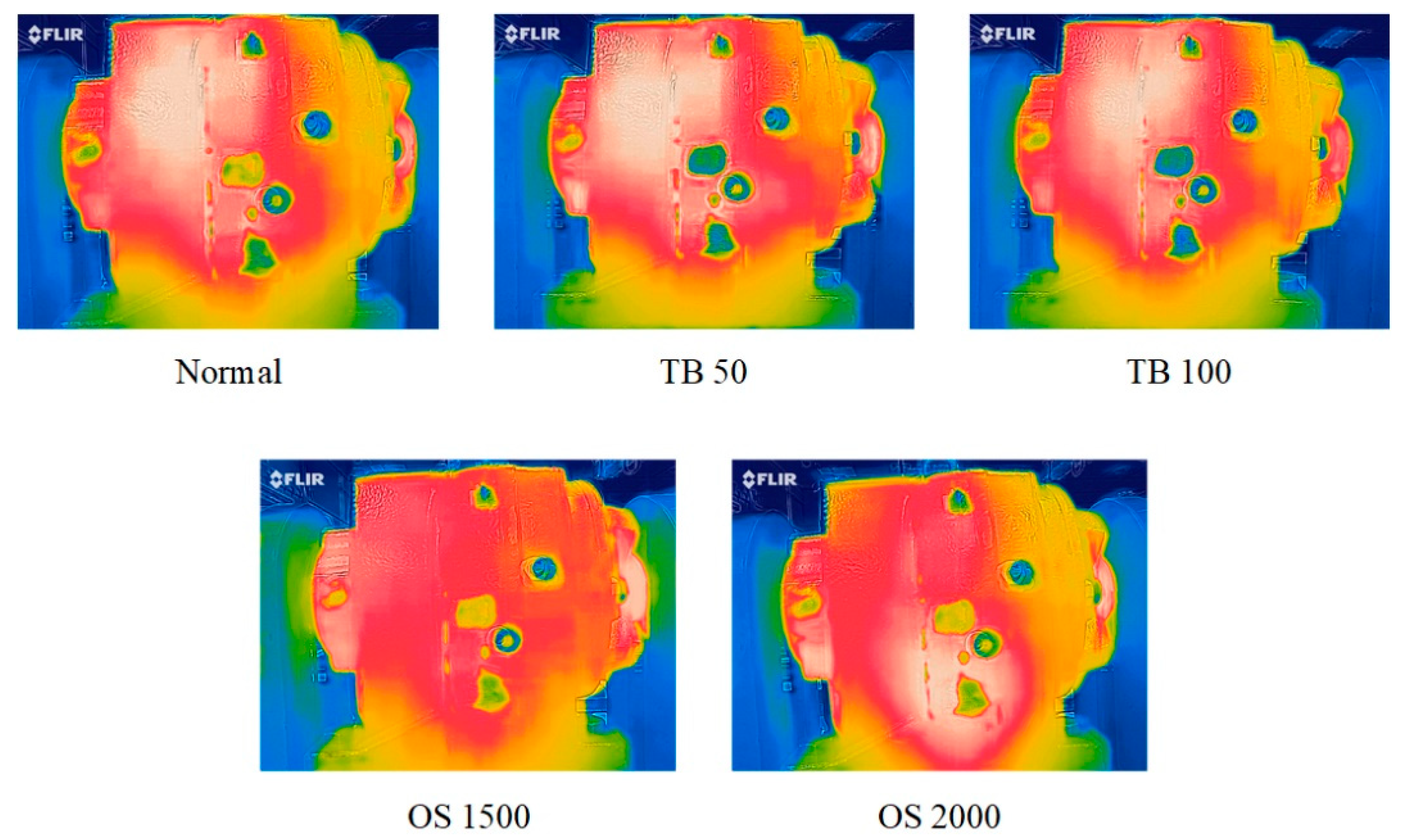
| 1 | Normal | 480/320 |
| 2 | TB 50 | 480/320 |
| 3 | TB 100 | 480/320 |
| 4 | OS 1500 | 480/320 |
| 5 | OS 2000 | 480/320 |
| Model | Layer | Filter Number | Size of Kernel | Output Size | Stride | Padding | Active Function |
|---|---|---|---|---|---|---|---|
| Features extractor | Conv2d 1 | 8 | 3 × 3 | 8 × 62 × 30 | [1,1] | 0 | ReLU |
| BN 1 | 8 | - | 8 × 62 × 30 | - | - | - | |
| MaxPool2d 1 | 8 | 2 × 2 | 8 × 31 × 15 | [2,2] | - | - | |
| Conv2d 2 | 16 | 3 × 3 | 16 × 29 × 13 | [1,1] | 0 | ReLU | |
| BN 2 | 16 | - | 16 × 29 × 13 | - | - | - | |
| MaxPool2d 2 | 16 | 2 × 2 | 16 × 14 × 6 | [2,2] | - | - | |
| FC 1 | - | - | 680 | - | - | - | |
| FC 2 | - | - | 300 | - | - | ReLU | |
| FC 3 | - | - | 56 | - | - | ReLU | |
| FC 4 | - | - | 28 | - | - | ReLU | |
| States classifier | FC | - | - | 5 | - | - | Softmax |
| Domain discriminator | FC | - | - | 1 | - | - | Softmax |
| Tasks | Source Domain | Target Domain | Accuracy (%) |
|---|---|---|---|
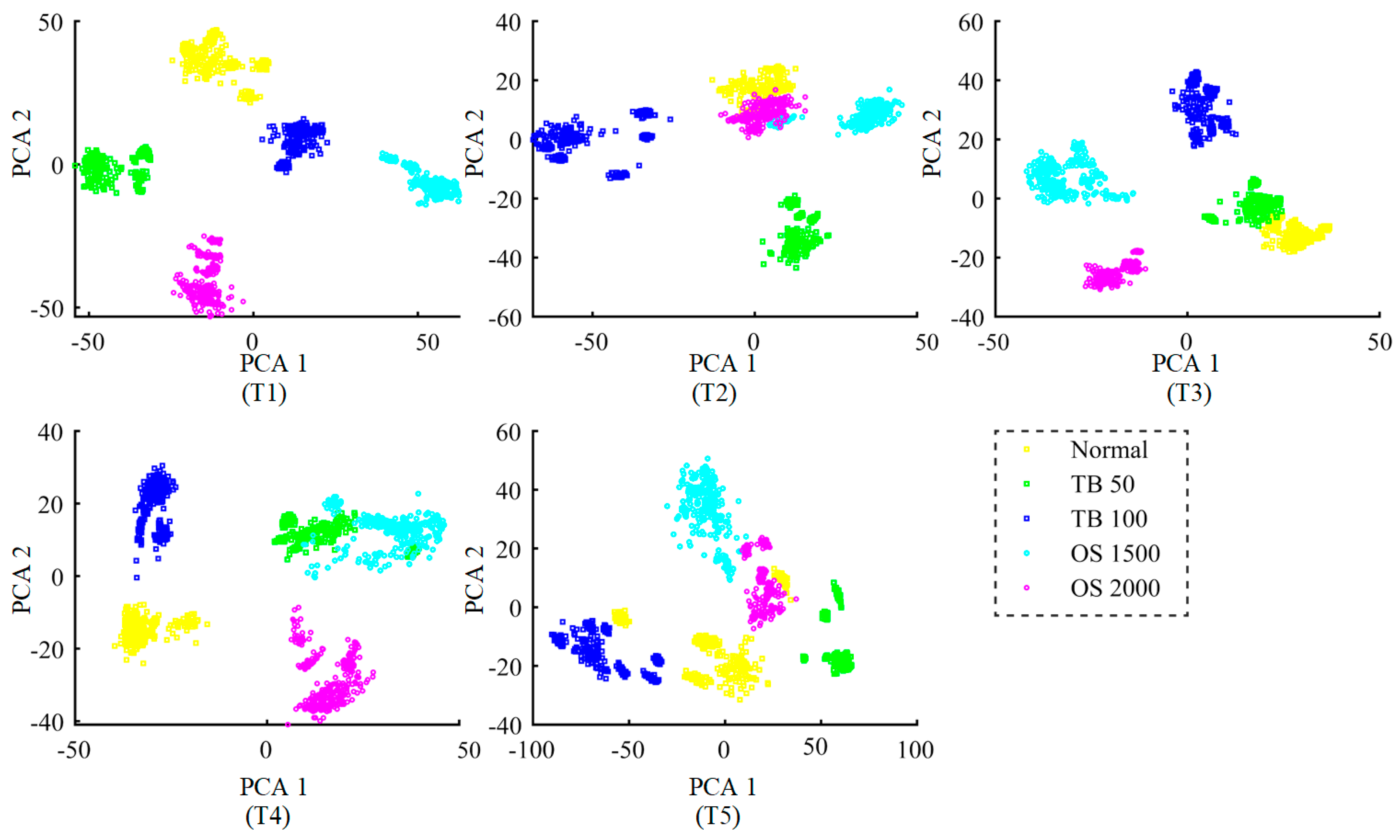
| T1 | L0 | L30 | 100.00% |
| T2 | L0 | L70 | 98.98% |
| T3 | L30 | L70 | 100.00% |
| T4 | L70 | L0 | 100.00% |
| T5 | L0 | L100 | 96.67% |
| Tasks | DANN | DA-MMD | DACNN_SV | DACNN_SI | Proposed FDACNN |
|---|---|---|---|---|---|
| T1 | 98.98% | 100.00% | 47.38% | 100% | 100.00% |
| T2 | 92.96% | 97.12% | 40.88% | 95.69% | 98.98% |
| T3 | 97.38% | 98.97% | 67.44% | 100% | 100.00% |
| T4 | 80.00% | 92.69% | 35.56% | 97.94% | 100.00% |
| T5 | 60.00% | 85% | 35.44% | 83% | 96.67% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, G.; Zhang, Z.; Qiao, B.; Li, Y. Fusion Domain-Adaptation CNN Driven by Images and Vibration Signals for Fault Diagnosis of Gearbox Cross-Working Conditions. Entropy 2022, 24, 119. https://doi.org/10.3390/e24010119
Mao G, Zhang Z, Qiao B, Li Y. Fusion Domain-Adaptation CNN Driven by Images and Vibration Signals for Fault Diagnosis of Gearbox Cross-Working Conditions. Entropy. 2022; 24(1):119. https://doi.org/10.3390/e24010119
Chicago/Turabian StyleMao, Gang, Zhongzheng Zhang, Bin Qiao, and Yongbo Li. 2022. "Fusion Domain-Adaptation CNN Driven by Images and Vibration Signals for Fault Diagnosis of Gearbox Cross-Working Conditions" Entropy 24, no. 1: 119. https://doi.org/10.3390/e24010119
APA StyleMao, G., Zhang, Z., Qiao, B., & Li, Y. (2022). Fusion Domain-Adaptation CNN Driven by Images and Vibration Signals for Fault Diagnosis of Gearbox Cross-Working Conditions. Entropy, 24(1), 119. https://doi.org/10.3390/e24010119