1. Introduction
The presence of quantum correlations in composite quantum systems is one of the main features of quantum mechanics. Among the quantum correlations, the entanglement [
1] is surely the most important one, as it is the first quantum correlation that used as physical resource. However, it is proved that non-entangled quantum correlations can also be exploited in quantum protocols. As a matter of fact, non-entangled quantum correlations not only play important roles in various quantum computing tasks and quantum communications, but also widely exist in various biological activities. In the study of photosynthesis, Cho observed quantum coherence when he investigated the energy transfer process of the Light Capture Complex by a two-dimensional spectral research method [
2]. Evidence and experiments show that quantum coherence plays an important role in photosynthesis of green plants and bacteria [
3,
4]. By the nuclear magnetic resonance (NMR) experiments, Standish proved that nonlocal correlation exists in human brain information processing [
5]. Therefore, the study and characterization of quantum correlations that go beyond the paradigm of entanglement have attracted increasingly more attention recently.
The prominent role of such quantum correlations (QCs) in the efficient realization of a number of tasks has led to the introduction of several measures of QCs. Notice that, in many quantum protocols, the systems considered are continuous variable systems. For example, the information propagated and communicated during the process of quantum communication is carried by photons, and the corresponding physical system is a continuous-variable system. For continuous-variable systems, Giorda, Paris [
6] and Adesso, and Datta [
7] independently proposed the definition of Gaussian quantum discord (GQD)
D for two-mode Gaussian states
via the mutual information
and the extractable information
determined by performing the Gaussian positive operator value measurements (GPOVMs). It was revealed that a Gaussian state
contains the GQD (i.e.,
) if and only if
is not a product state. G. Adesso and D. Girolami in [
8] introduced the concept of Gaussian geometric discord (GGD)
for
-mode Gaussian states
via GPOVMs and the Hilbert–Schmidt norm. It is also shown that
if and only if
is a product state, that is,
contains no quantum correlations. Thus, both GQD and GGD are quantifications of the same bipartite Gaussian quantum correlation:
has the correlation if and only if
is not a product state. Since then, many efforts have been made to find simpler methods to quantify this Gaussian quantum correlation and various measures for it were proposed. The measurement-induced disturbance of Gaussian states was studied in [
9]. Gaussian discord of response (
) for two-mode Gaussian states can be found in [
10]. The MIN for Gaussian states was discussed in [
11]. For other related results, see in [
12,
13,
14,
15,
16,
17,
18], and the references therein. Based on fidelity, in [
19], the authors introduced a quantum correlation
for Gaussian systems. The quantum non-locality
for Gaussian systems is discussed in [
20]. However, by now, all known quantifications of this correlation for continuous-variable systems are very difficult to compute. Most of them can only be calculated for
-mode Gaussian states or some special
-mode Gaussian states. This is mainly because all quantifications of the correlation involve measurements performed on one subsystem and optimization process, which made them difficult to evaluate. This clearly limits the applications of such Gaussian quantum correlation in real-life scenarios. Therefore, it makes sense to find simpler and computable quantifications of Gaussian quantum correlations.
According to the works in [
21,
22,
23,
24], a bona fide quantum correlation
(here, local measurements are performed on subsystem A) for Gaussian states with respect to subsystem A should satisfy:
- (i)
if and only if is a product state;
- (ii)
holds for any Gaussian unitary operators , and any Gaussian state ;
- (iii)
holds for any Gaussian channel performed on subsystem B and any Guassian state ;
- (iv)
There exists an entanglement measure such that holds for any bipartite pure state .
Similar criterion should be satisfied by if local measurements are performed on subsystem B. Note that the property that is a product state is symmetric about the subspace, but the quantum correlation is not in general. Therefore, it is natural and more reasonable to find Gaussian quantum correlations that are symmetric about the subsystems and satisfy:
- (a)
if and only if is a product state;
- (b)
(Locally Gaussian unitary invariant) holds for any Gaussian unitary operators , and any Gaussian state ;
- (c)
(Non-increasing under local Gaussian channels) holds for any Gaussian channels and performed, respectively, on subsystem A and B and any Gaussian state ;
- (d)
(Reducing to an entanglement measure for pure states) There exists an entanglement measure such that holds for any bipartite pure state .
It is clear that the condition (c) implies the condition (b) and, if satisfies properties (a–d), then it satisfies properties (i–iv).
The purpose of this paper is to propose a quantification
for bipartite Gaussian systems in terms of the covariance matrix, which avoids the measurements performed on a subsystem as well as the optimization procedure. This Gaussian correlation measure
describes the same correlation as Gaussian discord for Gaussian states but has some remarkable nice properties that the Gaussian discord does not possess: (1)
is a quantum correlation satisfying the properties (a–c), (2)
is symmetric about subsystems and has no ancilla problem, and (3)
can be estimated easily for any
-mode Gaussian states. Furthermore,
is better in detecting the non-classicality in Gaussian states as an upper bound of
in [
20]. Finally, as an application, we propose a noninvasive and repeatable quantum method for detecting intracellular temperature using
-mode Gaussian quantum correlation
.
2. Definition of the Quantity
We first recall briefly some notions and notations concerning Gaussian states and Gaussian unitary operations. For arbitrary state
in a
n-mode continuous-variable system with state space
H, its characteristic function
is defined as
where
,
is the Weyl displacement operator,
. As usual,
and
(
) stand for, respectively, the position and momentum operators, where
and
are the creation and annihilation operators in the
kth mode satisfying the Canonical Commutation Relation (CCR)
If the state
has finite second-order moment, then
is called the mean or the displacement vector of
and
is called the covariance matrix (CM) of
defined by
with
([
25]). Note that
is real symmetric and satisfies the condition
, where
with
for each
j. Here,
stands for the algebra of all
matrices over the real field
. Denote by
and
, respectively, the set of all states in system
H and the set of all states with finite second-order moment in
n-mode CV system
H. Moreover,
is called a Gaussian state if
is of the form
Now, assume that
is an
-mode Gaussian state with state space
. Then, the CM
of
can be written as
where
,
and
. Furthermore,
A and
B are the CMs of the reduced states
and
, respectively [
26]. Actually, all the quantum correlations between subsystems
A and
B are embodied in
C, to be specific, if
, then the Gaussian state
is a product state, that is,
for some
and
[
27]. Particularly, if
, by means of local Gaussian unitary (symplectic at the CM level) operations,
has a standard form:
with
,
,
,
and
.
For any unitary operator
U acting on
H, the unitary operation
is said to be Gaussian if it maps Gaussian states into Gaussian states, and such
U is called a Gaussian unitary operator. It is well known that a unitary operator
U is Gaussian if and only if
for some vector
in
and some
, the symplectic group of all
real matrices
that satisfy
Thus, every Gaussian unitary operator
U is determined by some affine symplectic map
acting on the phase space, and can be denoted by
[
26,
28]. In a word, if
is any
n-mode Gaussian state with CM
and displacement vector
, and assume that
is a Gaussian unitary operator. Then, the characteristic function of the Gaussian state
is of the form
, where
and
.
Now, we propose a positive function for continuous-variable systems in terms of the CM for -mode states.
Definition 1. For any -mode state with CM , the quantity is defined by Clearly, is very easily evaluated for any -mode state because no measurements are involved and no optimization procedure is needed.
Definition 1 is inspired by the work in [
20], in which Gaussian quantum correlation
was introduced and discussed. For any
-mode state
with CM
, the quantity
is defined as -4.6cm0cm
where the supremum is taken over all Gaussian unitary operators
satisfying
with
the reduced state. It was shown in [
20] that, for any
-mode state
with CM
, we have
However, it is well known that the determinant
if
A is invertible and
if
B is invertible (see, for example, in [
29]). Thus,
Therefore,
is exactly an upper bound for the Gaussian quantum correlation
obtained in [
20]. Note that the Gaussian correlation
is not symmetric about the subsystems A and B.
3. Properties of on Gaussian States
Let
be the function as Definition 1.
has several nice properties, whose proofs will be given in
Appendix A.
Theorem 1. The following statements are true:
- (1)
is independent of the mean of states;
- (2)
is symmetric about the subsystems: for any state , , where is the swap defined by .
- (3)
has no ancilla problem: for any state , regarding as a bipartite state with partition A:BC, we always have .
Theorem 2. is locally Gaussian unitary invariant, that is, for any -mode Gaussian state and any Gaussian unitary operators and , we have .
Theorem 3. For any -mode state with CM , if and only if . Particularly, for any Gaussian states , if and only if is a product state.
By Theorem 3, for Gaussian states,
describes the same non-classicality as that described by Gaussian quantum discord (two-mode) [
6,
7], Gaussian geometric discord [
8], the Gaussian discord of response
in [
10], the correlations
Q,
discussed in [
12], the correlations
and
discussed, respectively, in [
19,
20], as they take value 0 at a Gaussian state
if and only if
is a product state.
According to Definition 1, relies only on the CM of a given Gaussian state and is independent of the measurements and optimization process. Hence, unlike those Gaussian quantum correlations involved measurements, the estimate of is easy and reliable. In the following, we are going to give some computation formulas of based on the representations of CM of the Gaussian states.
For any
-mode Gaussian state
, under some suitable local Gaussian unitary operation, its CM can be reduced to the standard form
Therefore, by Theorem 2, we have
Theorem 4. If is a -mode Gaussian state whose CM has the standard form Equation (5), then we have Consider the
-mode pure Gaussian states. Without loss of generality, assume that
. Then, according to the mode-wise decomposition of pure Gaussian states [
30], the CM
of any
-mode pure Gaussian state can always be brought into
by the corresponding symplectic transformation
. Moreover,
with
,
, the single-mode mixedness factor.
The following results give computation formulas of for, respectively, -mode and -mode pure Gaussian states in terms of the single-mode mixedness factor.
Theorem 5. Suppose , for any -mode pure Gaussian state , let , , be the single-mode mixedness factors in the CM of the mode-wise decomposition of the pure Gaussian state. Then, we have Particularly, any
-mode pure Gaussian state can always be brought in the phase-space Schmidt form [
31]. The corresponding symplectic transformation
achieving the Schmidt decomposition is the direct sum of two diagonalizing matrices acting on the single-mode and
m-mode subsystems, respectively, i.e.,
. Suppose
is the CM of a
-mode pure Gaussian state; accordingly, the CM of its phase-space Schmidt form is
with
the single-mode mixedness factor. We also call
the phase-space Schmidt form of
. It is clear that the phase-space Schmidt form of a
-mode pure Gaussian state is the tensor product of a two-mode squeezed state and an
-mode uncorrelated vacuum state [
32].
Corollary 1. For any -mode pure Gaussian state , we havewhere is the single-mode mixedness factor in the phase-space Schmidt form of the CM Γ. The physical meaning of
is that
reveals that
is more correlated than
. To see this, let us consider the following example. According to the mode-wise decomposition of pure Gaussian states mentioned above, the phase-space Schmidt form of the CM of any
-mode pure Gaussian state
is
where
is the single-mode mixedness factor. In [
33], a measure of entanglement
for
-mode pure Gaussian state is derived, where, for any
-mode pure Gaussian state
with
, the phase-space Schmidt form of the CM,
It is well known that for any entanglement measure
E, and any states
and
, one may regard that
is more entangled than
whenever
. Then, for Gaussian pure state
with CM
and
with CM
, one has
and
, thus
, i.e.,
is more correlated than
. By Definition 1,
Therefore,
, which reveals the same fact that
contains more correlation than
. Geometrically,
reflects that
is closer to the set of product states than
.
As mentioned before,
,
D,
,
Q,
, and
describe the same non-classicality for
-mode Gaussian states. In [
20], we compared the scales of
with Gaussian quantum discord
D, Gaussian Geometric Discord
and quantum correlation
Q, and found that,
is the best one in detecting such non-locality. As an upper bound of
,
surely can do better.
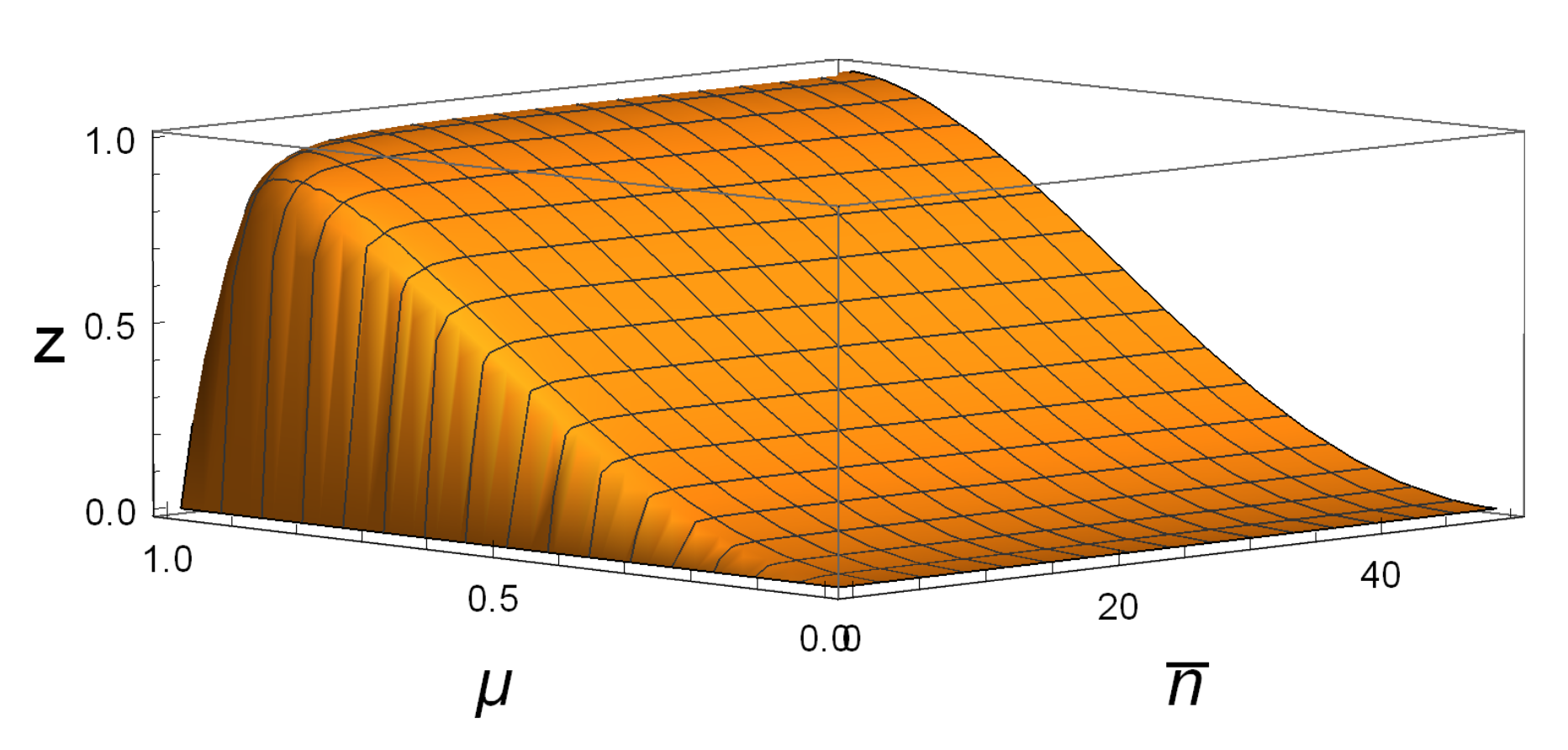
To be specific, consider a special class of Gaussian states, the symmetric squeezed thermal states (SSTSs). Recall that the symmetric squeezed thermal states (SSTSs) are Gaussian states whose CMs are as in Equation (
2), parameterized by
and
such that
and
, where
is the mean photon number for each party and
is the mixing parameter with
[
34]. By Theorem 4, for any SSTS
, we have
According to the analytical formula provided in [
8], for any SSTS
with parameters
and
, one has -4.6cm0cm
Figure 1 shows that
for all SSTSs with
and
. For example, taking
and
, one sees that
, while
. This suggests that
is better in detecting whether or not a state is a product state.
4. Non-Increasing Property of under Local Gaussian Operations
As a Gaussian state
is described by its CM
and displacement vector
, we can denote it as
. Recall that a Gaussian channel is a quantum channel that transforms Gaussian states into Gaussian states. Assume that
is a Gaussian channel of
n-mode Gaussian systems. Then, there exist real matrices
satisfying
and det
, and a vector
, such that, for any
n-mode Gaussian state
, we have
with
Therefore, we can parameterize the Gaussian channel
as
.
We first consider the -mode Gaussian states. As is invariant under local Gaussian unitary operation, we may require that the CM of involved Gaussian state is of the standard form.
Theorem 6. Consider the -mode continuous-variable system AB. Let be a Gaussian channel performed on the subsystem B with and . Assume that is any -mode Gaussian state with CM . Then,where , , and . Remark 1. If , then , and we haveIn fact, in this case, the Gaussian channel maps any Gaussian state to a product state. Thus, by Theorem 3, we always have . Remark 2. If , then , andThus, in this case, after performing the Gaussian operation , the quantity remains the same. As a consequence of Theorem 6, the following result gives a stronger form of
local Gaussian operation non-increasing property of
, which is not possessed by other known similar Gaussian correlations such as the Gaussian quantum discord (two-mode) [
6,
7], Gaussian geometric discord [
8], and the Gaussian quantum correlation
in [
19].
Corollary 2. Let be a -mode Gaussian state. Then, for any Gaussian channels and performed on the subsystem A and B, respectively, we have It is remarkable that the result of Corollary 2 is true for any -mode systems; that is, we have the following.
Theorem 7. For any -mode Gaussian state , for any Gaussian channels and performed on the subsystem A and B respectively, we have Obviously, Theorem 7 implies Theorem 2, the local Gaussian unitary invariance.
Theorem 7, together with Theorems 1–3, reveal that is a Gaussian quantum correlation without ancilla problem which describes the same Gaussian quantum correlation as the Gaussian quantum discord and the Gaussian geometric discord for -mode Gaussian systems. An -mode Gaussian state has this correlation if and only if it is not a product state. We remark here that, just like the entanglement, the non-product correlation is symmetric about the subsystems. Therefore, it is more natural to require that a non-product correlation measure is symmetric about the subsystems. Our has this symmetry, but all known such Gaussian correlations are introduced by some local operations on a subsystem and thus not symmetric about the subsystem.
5. A Possible Future Application of : Thermometry
Intracellular temperature measurement is a key point in the field of life science, and scientists have invented nanothermometers for detecting intracellular temperatures. Uchiyama detected and depicted the temperature distribution of a single cell by implanting special nanogels into the cytoplasm [
35]. Other methods for measuring intracellular temperature can be found in [
36,
37], and those nanothermometers detect intracellular temperature by sending special luminescent or polymer materials into the cell. As the Gaussian correlation
is computable for any
-mode Gaussian states, it is easier to be applied in real-life scenarios such as the quantum information tasks and quantum biology scenarios. In this section, we give a possible application of
to thermometry, which is currently on theoretical level. In the following, we briefly describe a possible quantum method of measuring intracellular temperature by the Gaussian quantum correlation
.
To implement the quantum method, first, one prepare laser beam (Gaussian state) with quantum correlation as the initial state, and put this Gaussian state into a specific cell in certain tissue or organ by laser irradiation. The laser beam is so small that we can consider the cell as the environment system of the Gaussian state. The cell and the Gaussian state constitute a composite system, ignoring the effect of extracellular environment, the composite system can be treated approximately as a closed system. Obviously, the Gaussian state is not related to the environment the moment it enters the cell, as a consequence, the initial state of the composite system can written as , where stands for the cell sate. As the cell has temperature, we can view the cell as a thermal environment of the Gaussian state. Thus, the Gaussian state follows the thermodynamic evolution law related to environment temperature T in the cell. During the evolution process, the environment will affect the Gaussian state in the subsystem (we only consider the affect of intracellular temperature T here). Detecting the quantities of quantum correlation contained in the evolved state at time t by proper detector, after calculation, one gets the intracellular temperature of the cell.
As an illustration, and for simplicity’s sake, assume that the system which prepares the initial Gaussian state is a -mode boson system , denote and as the mass and frequency of the k-th resonator, let and stand for the momentum and position operator of the k-th mode, where . Let represent the thermal environment system (the cell), then the composite system coupled by the Gaussian state and the cell is . Apparently, the product state is the initial state of the coupled composite system, where is a Gaussian state with mean and covariance matrix , and stands for the cell state. Consider approximatively the composite system as a closed system, then the time evolution of the initial Gaussian state is unitary: , where the evolution operator depends on the Hamiltonian of the composite system. However, affected by the environment system, the time evolution of the reduced Gaussian state , is no longer unitary evolution of , instead, it is determined by a time-dependent Gaussian channel.
As
is locally unitary invariant and independent of the mean, without loss of generality, we can prepare
-mode squeezed thermal state
as the initial state, with covariance matrix
where
related to the compression parameters and the average photon number per mode, while
c depends on the compression parameters and the average photon number on two modes. Let
,
,
. Then, by an approach as in [
38,
39], one gets the covariance matrix
of the time revolution
is
where
, with
K the Boltzmann constant. A proof of Equation (
11) will be given in
Appendix A.
Now, by Theorem 4, at time
t, and under the influence of cell environment
T, the quantity of quantum correlation
of the Gaussian state
is
which depends on time
t and the intracellular temperature
T. Hence, we may write
as
. Thus, once we measured the quantity
of the Gaussian state
at time
t, the intracellular temperature
T can be easily drawn from the Equation (
12), i.e., the intracellular temperature of the cell is detected.
We point out that, in our model, one may choose different detectors which can detect other quantum correlations contained in Gaussian state , while among which, the computation of is so far the simplest one.
In the following, under the settings of the above model, we investigate the change trend of quantum correlation .
Let
; it is clear that
is a monotone increasing function of Intracellular temperature
T, and one can write Equation (
12) as
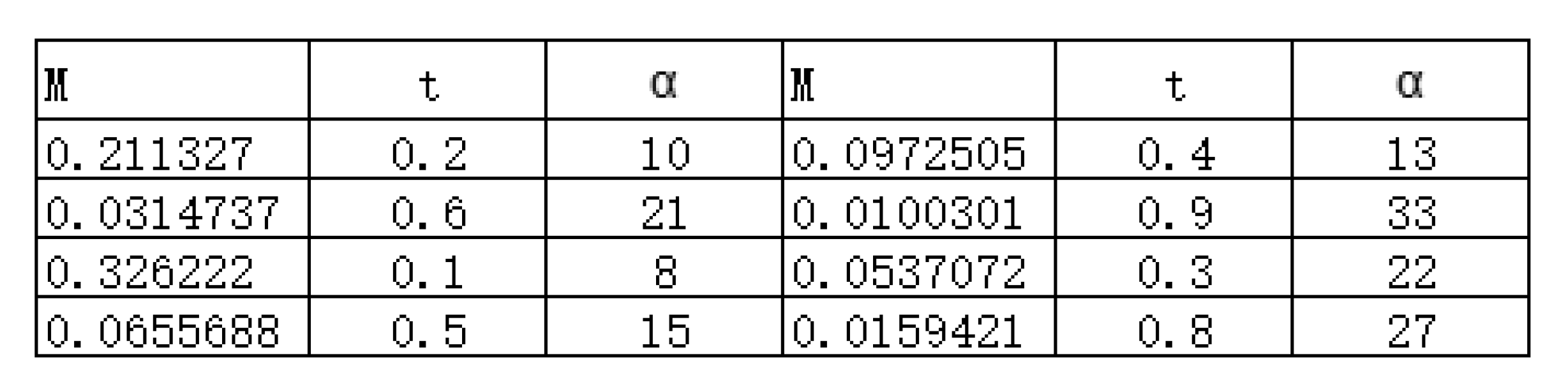
Figure 2 shows the corresponding relation between
,
t, and
. Apparently, once the quantity
of the Gaussian state
at time
t is detected, one can solve
by Equation (
13), and further, the intracellular temperature
T.
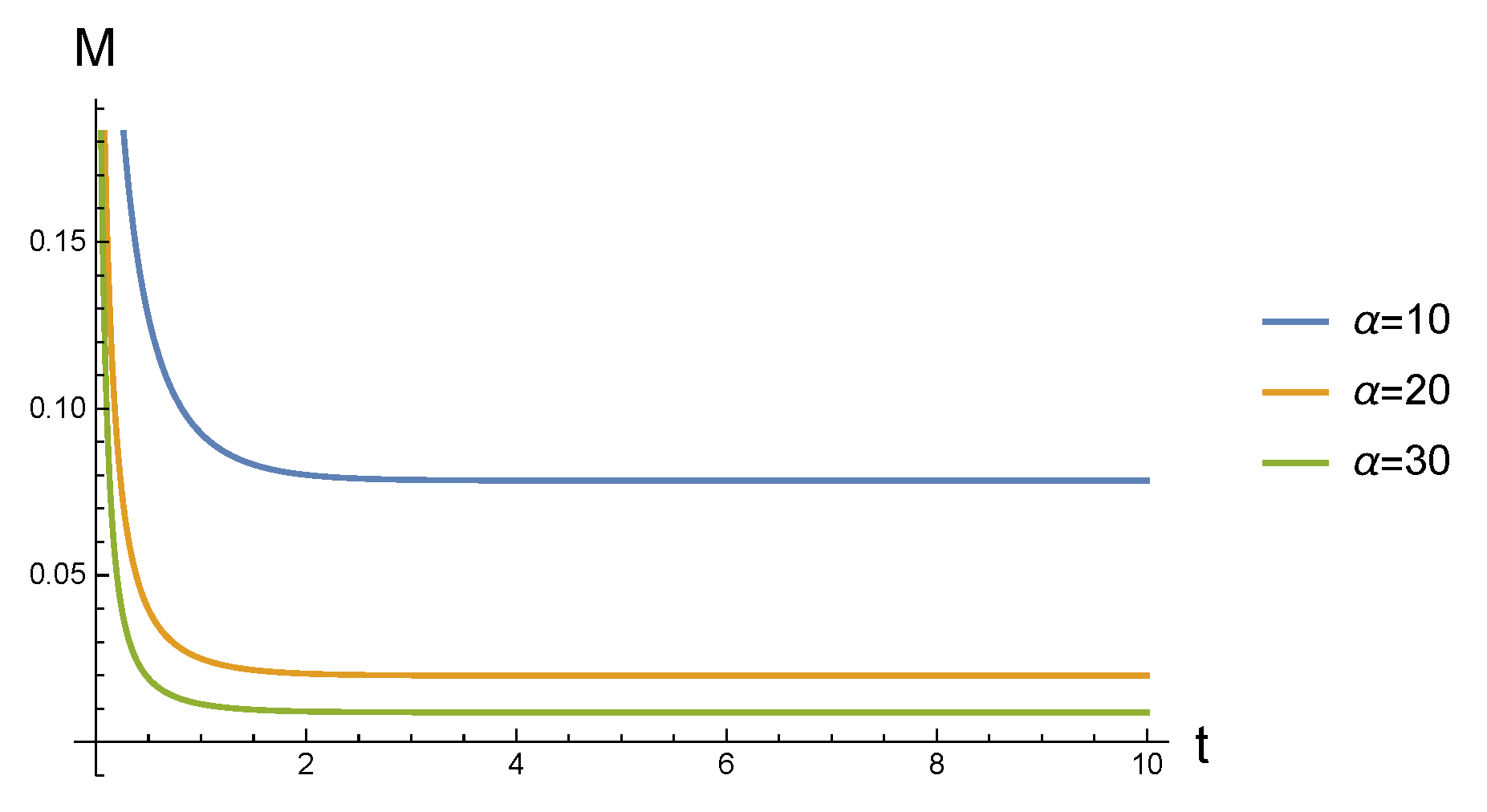
Fix
,
, and
, in
Figure 3, we delineate the evolution behaviors of quantum correlation
the cellular environment with blue, orange, and green curves, respectively. Clearly,
decrease dramatically in a short time at the beginning, after that, it becomes stable.
Figure 2 also reveals that, as
gets bigger(the temperature gets higher), the speed and the amplitude of the attenuation of
gets greater, i.e., when
is small, it takes more time for
to become stable. This means that when a Gaussian state is coupled with the cellular environment, the revolution of quantum correlation
contained in Gaussian state is a feedback of the intracellular temperature. To be specific, the greater the speed and amplitude of the attenuation of
, the higher the intracellular temperature.
6. Conclusions
By now, all quantifications of Gaussian quantum discord and Gaussian geometric discord for -mode bipartite continuous-variable systems have been derived from considering the difference between the Gaussian state and the output after performing some measurements over certain subsystem, and then, taking an optimization procedure. The obstacle for applying these quantifications of Gaussian quantum discord is that they are very difficult to be calculated, though a lot of effort have be paid.
The main work of the present paper is to propose a new quantification
in terms of covariant matrices for any states in
-mode continuous-variable systems without any measurements performed on a subsystem and any optimization procedures. This quantification
has many attractive properties:
is independent of the mean of states, is symmetric about the subsystems, has no ancilla problem, and is easily computed for any
-mode Gaussian states.
is locally Gaussian unitary invariant and is increasing under local Gaussian channels, that is,
holds for any Gaussian channels
and
performed on the subsystem A and B, respectively.
if and only if
is a product state.
is an upper bound of a replacement of Gaussian geometric discord,
, which is defined and discussed in [
20]. Therefore,
is a Gaussian correlation which is a very nice replacement of Gaussian quantum discord as well as Gaussian geometric discord. As an application of
, a noninvasive quantum method for detecting intracellular temperature is proposed.
We remark that, unlike the other known Gaussian quantum correlations, is symmetric about the subsystem A and B. Thus, as a Gaussian quantum correlation, is more natural because the property that a state is not a product state is symmetric about the subsystems. Moreover, the concepts of Gaussian quantum discord and Gaussian geometric discord are very difficult to extend to multipartite multimode continuous-variable systems, however, the definition of can be generalized naturally to any states for multipartite multimode continuous-variable systems. This gives some possibility to discuss the problem of quantifying the Gaussian quantum correlation in multipartite multimode continuous-variable systems.



{kind=link}
{kind=link}
{kind=link}