
State Estimation of an Underwater Markov Chain Maneuvering Target Using Intelligent Computing




Abstract
:1. Introduction
- (1)
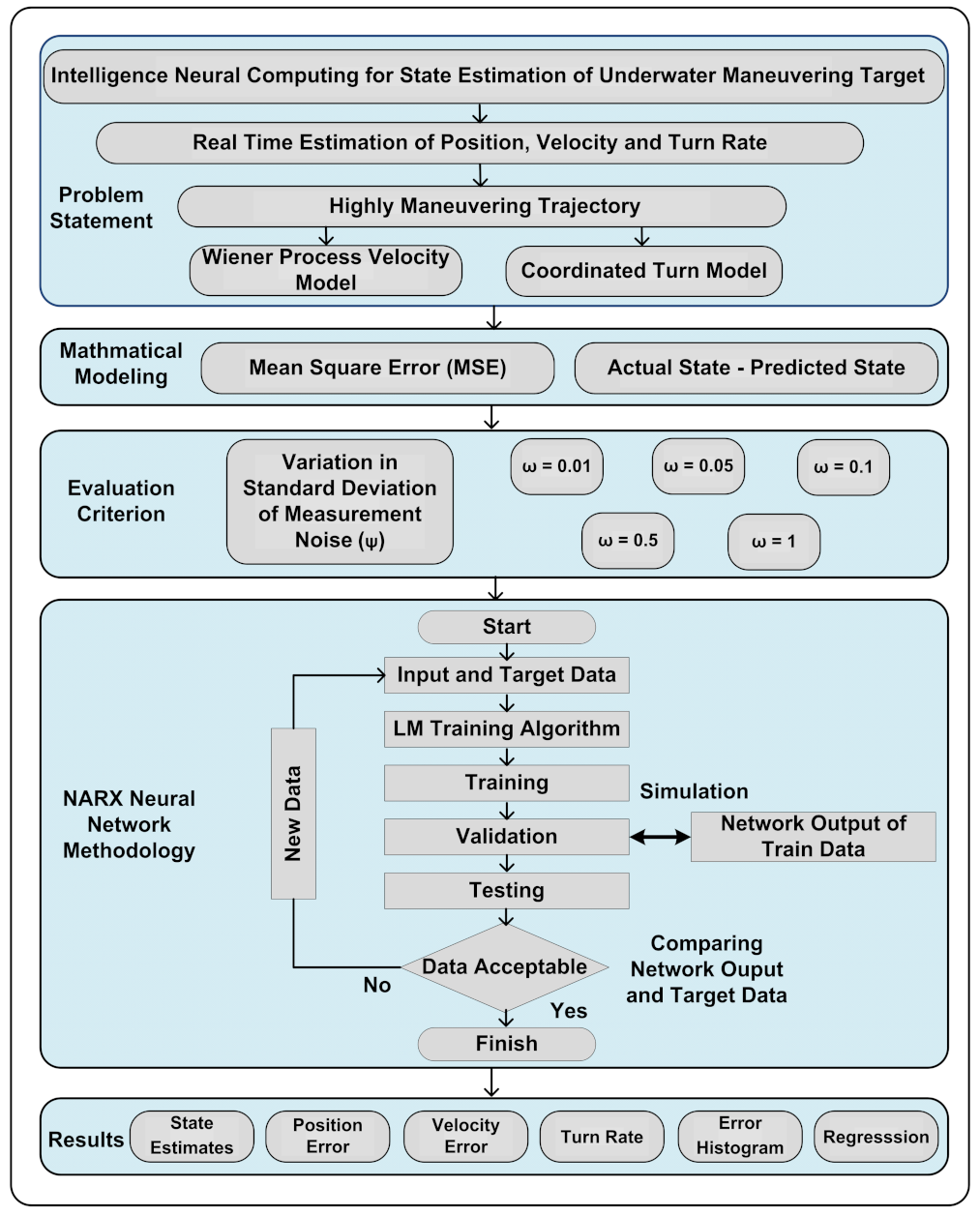
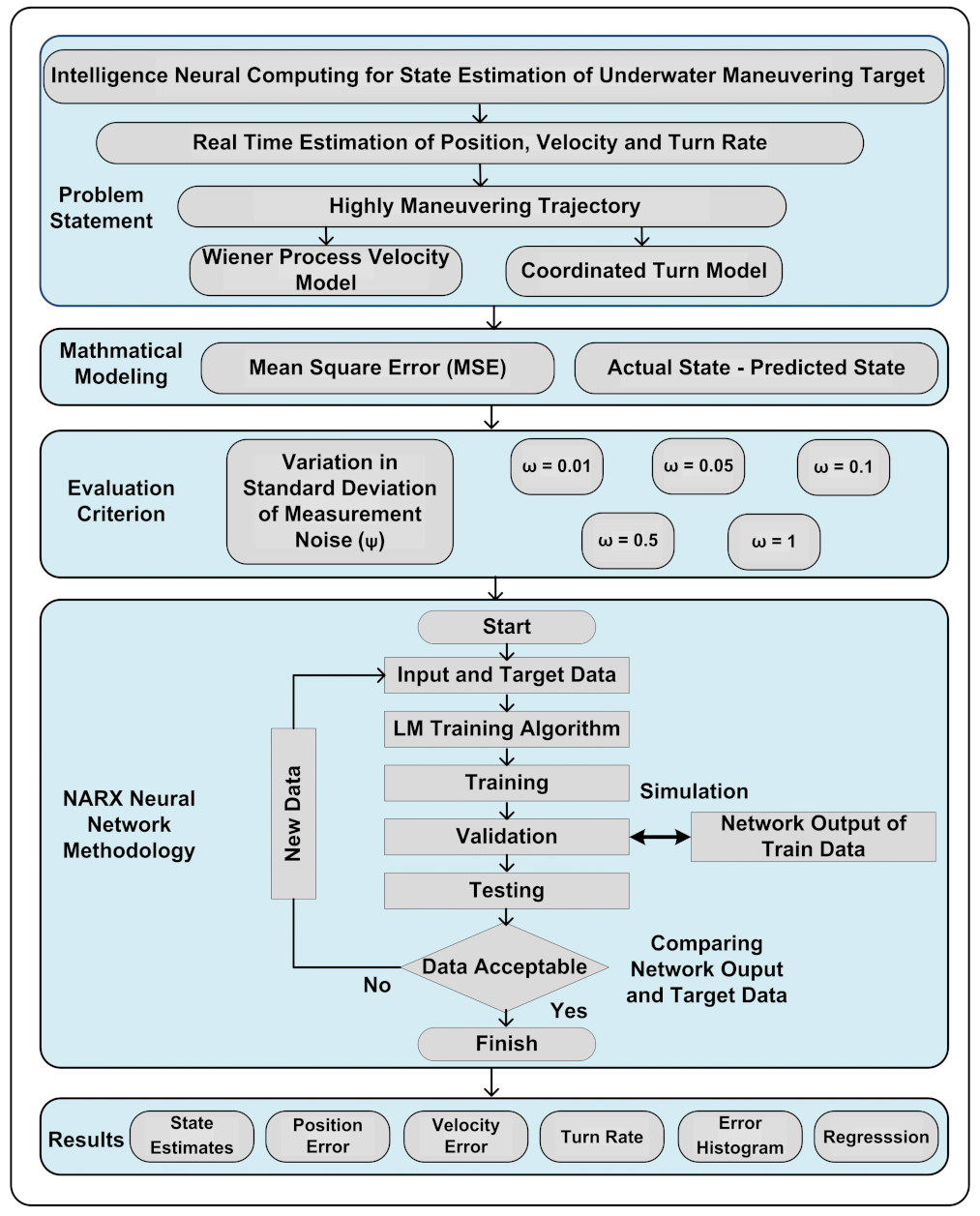
- The strength and potency of the NARX based neurocomputing paradigm are extensively investigated for accurate state approximation of a maneuvering underwater Markov chain target.
- (2)
- State estimates, position error, velocity error, turn rate estimates, error histogram, and regression analysis of NARX are computed for passive turning targets and compared with conventional nonlinear and multiple model variants of the Kalman filter like IMMEKF and IMMUKF.
- (3)
- Motion features of the kinetic target in the highly maneuvering trajectory are designed by utilizing the firmness of the well-known Wiener process velocity (WPV) model and the coordinated turn (CT) model.
- (4)
- The standard deviation of measurement noise is selected as an evaluation criterion, and its numerical values are varied in simulations for analyzing the trend of given techniques.
- (5)
- All the given algorithms are compared on the basis of a minimum mean square error (MSE), which is chosen as the performance matrix and simulation outcomes show that the accuracy of the NARX based neural network is far better from multiple model Kalman filters for estimating the real-time state of an underwater maneuvering object.
2. Markov Chain Maneuvering State Estimation System Model
2.1. Wiener Process Velocity (WPV) Model
2.2. Coordinated Turn (CT) Model
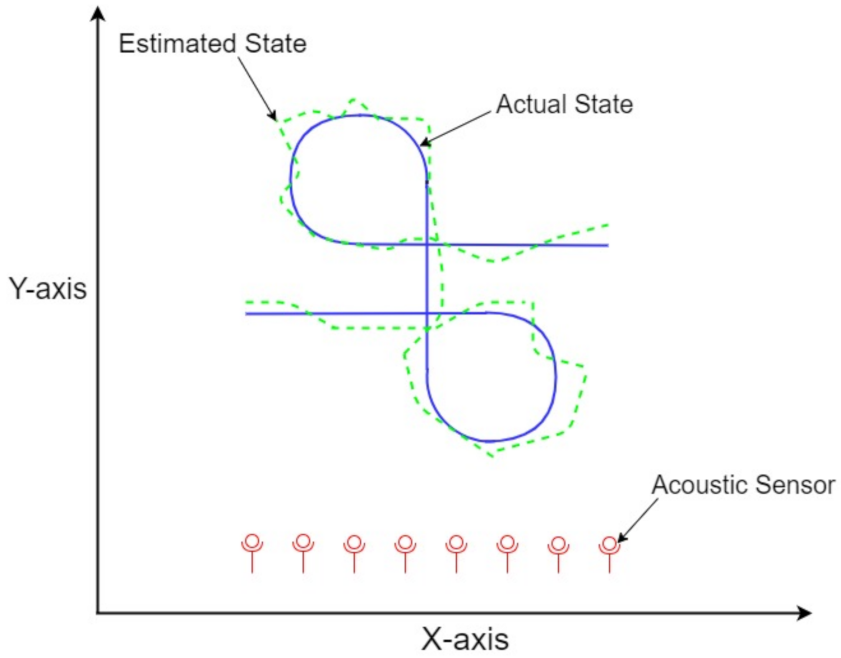
2.3. Measurement Model
- (1)
- Initial location of maneuvering object is the origin (0, 0), having a constant velocity of 1 towards x-axis e.g., = (1, 0).
- (2)
- A right turn is taken by target after 4 s of starting point with turn rate = −1.
- (3)
- The target ends turning right at the total time of 9 s and moves straight with a constant velocity of 1 for the next 2 s.
- (4)
- At the total time of 11 s, the underwater target maneuver for the left turn with turning parameter = 1.
- (5)
- At the total time of 16 s, the target ends turning on the left side and moves straight with a similar velocity for 4 s.
3. Intelligent Neural Computing
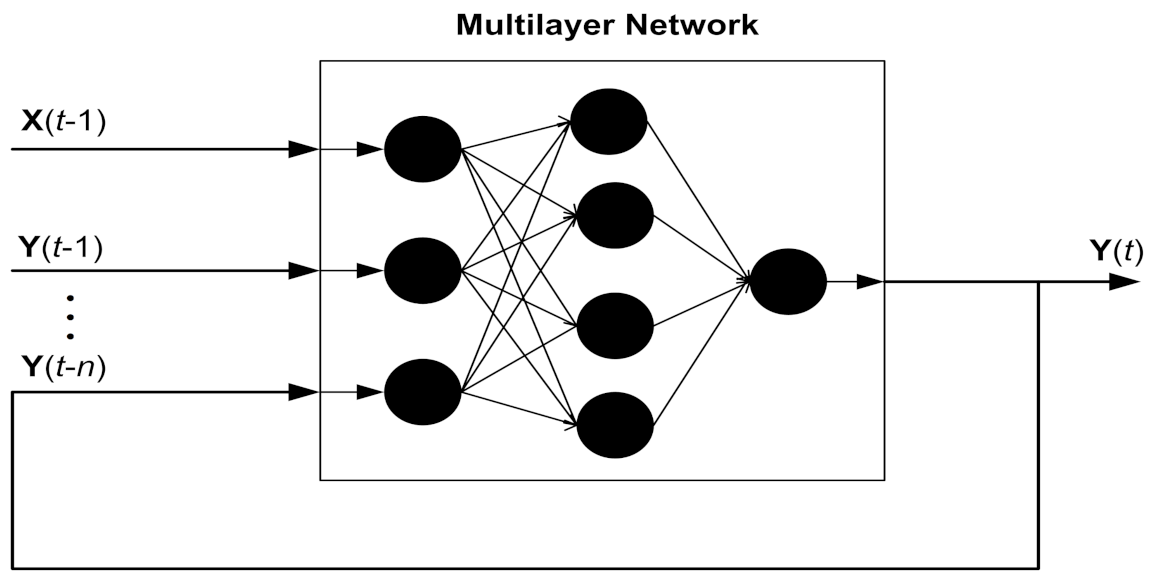
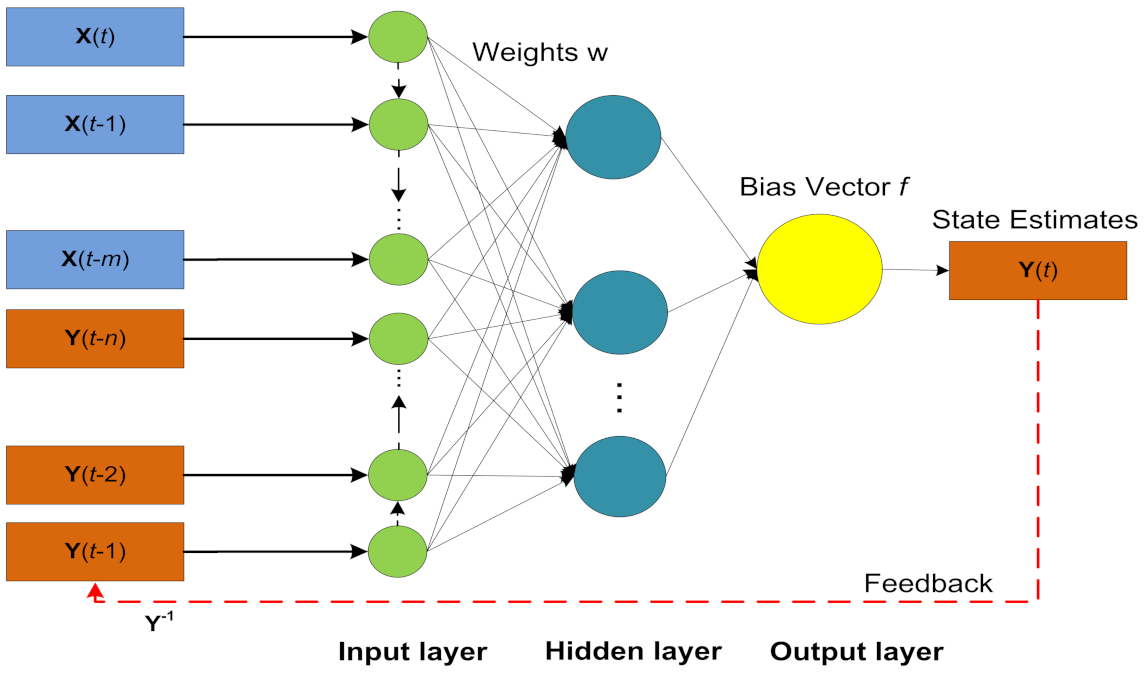
3.1. Nonlinear Autoregressive with the Exogenous Input (NARX) Neural Scheme
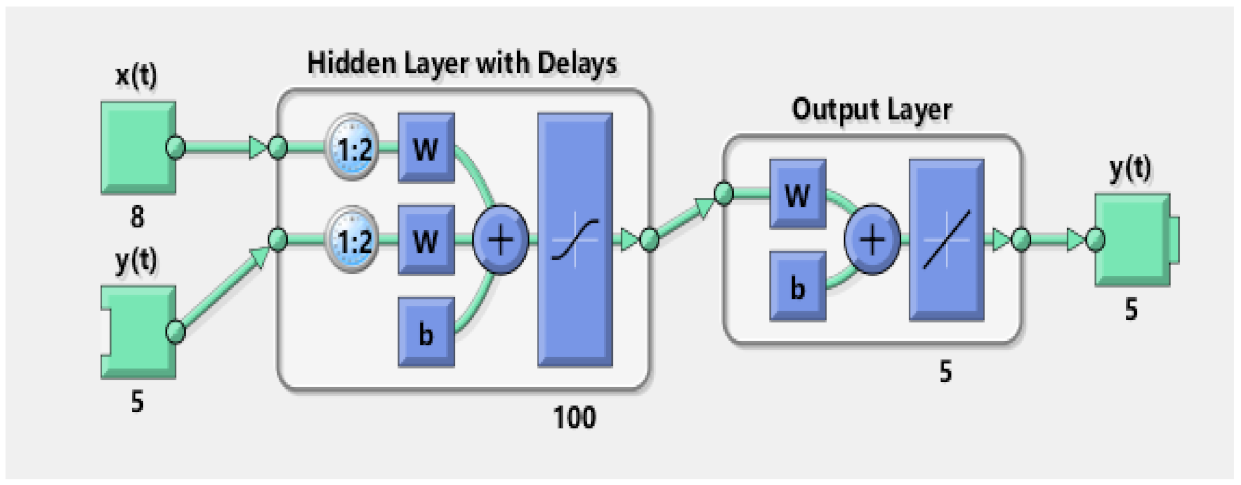
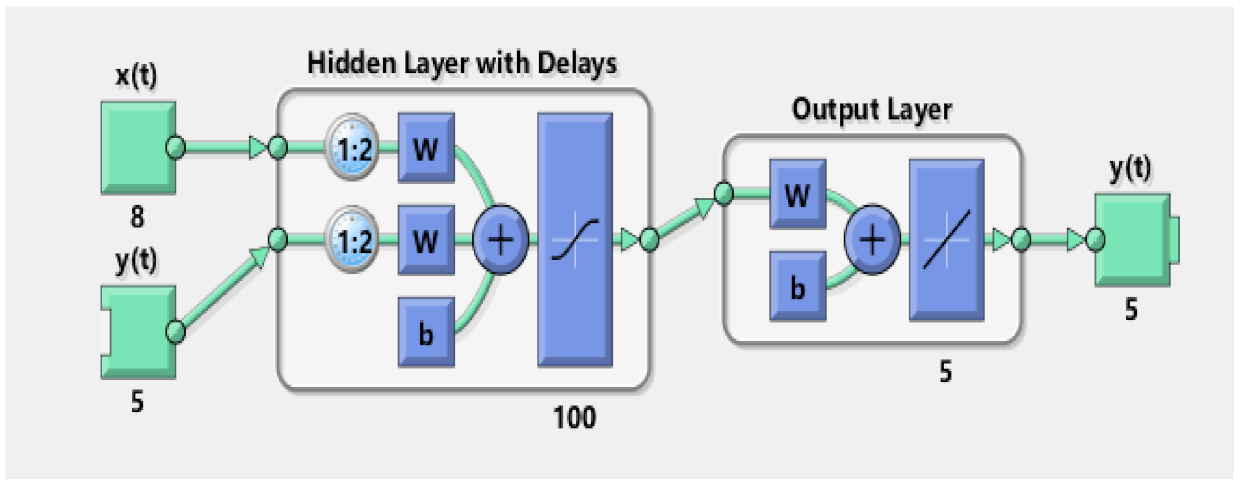
3.2. Architecture of an NARX Neural Scheme
3.3. Levenberg–Marquardt (LM) Training Method
3.4. Performance Evaluation Criterion
4. Simulation Results and Discussion
4.1. State Estimation Analysis of Markov Chain Maneuvering Target for Different Cases of the Standard Deviation of Measurement Noise
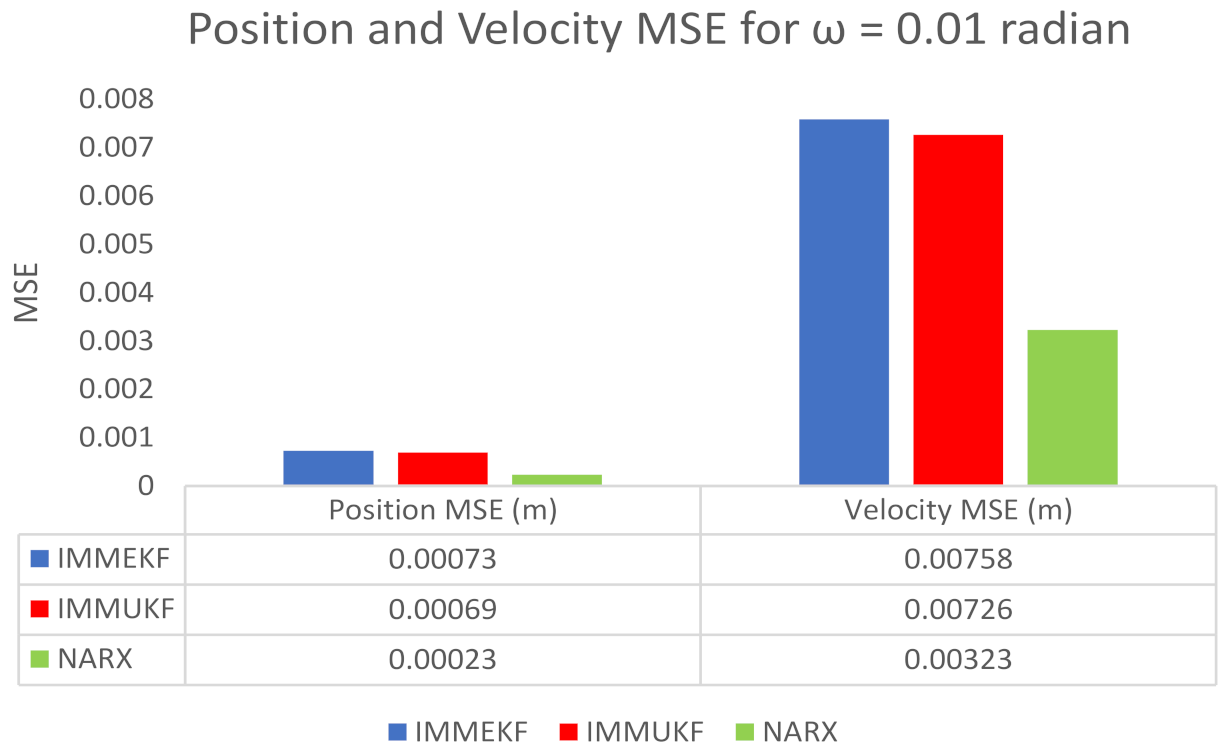
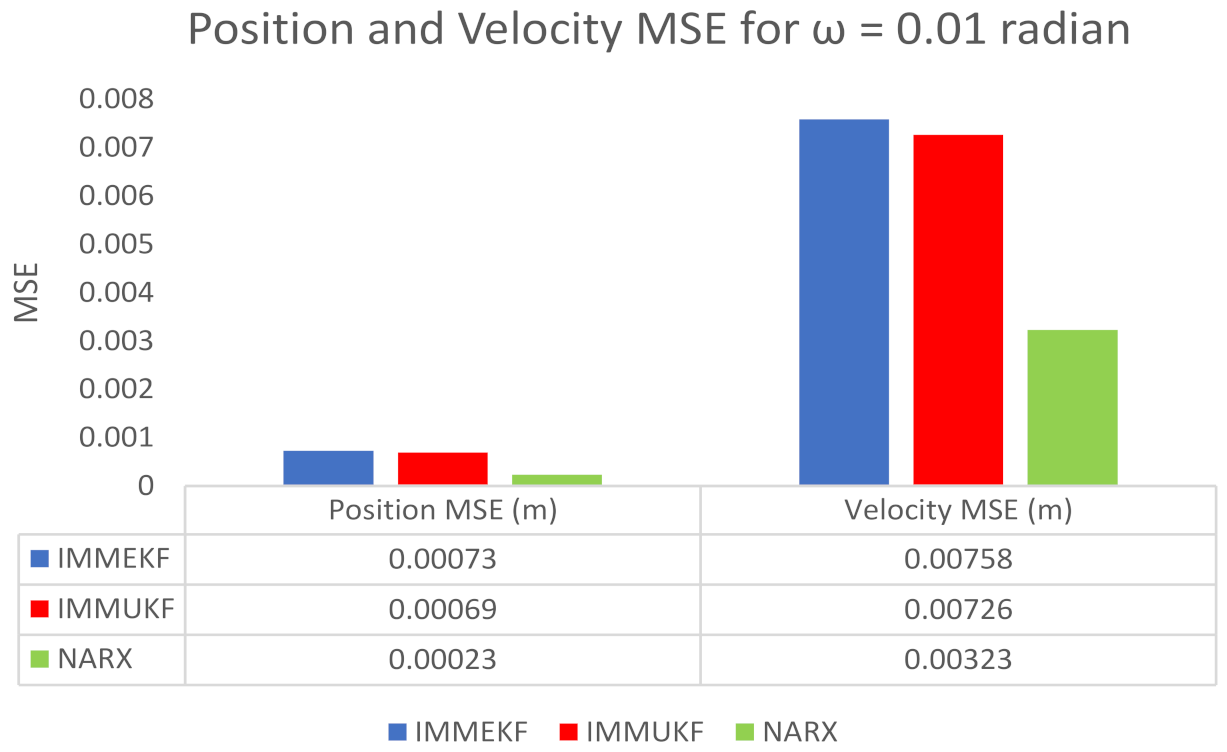
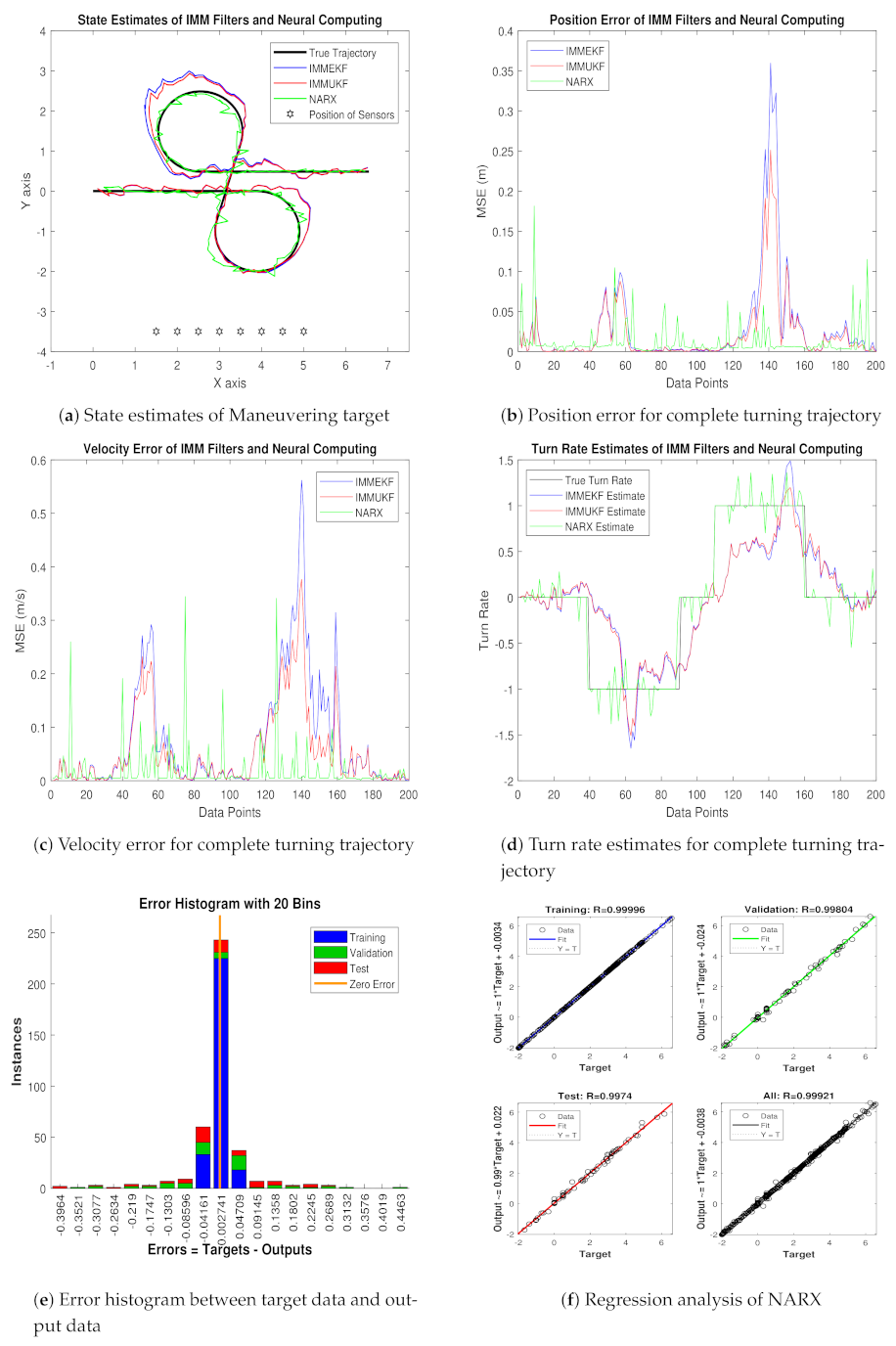
4.1.1. Case 1: The Standard Deviation of Measurement Noise = 0.01 Radian
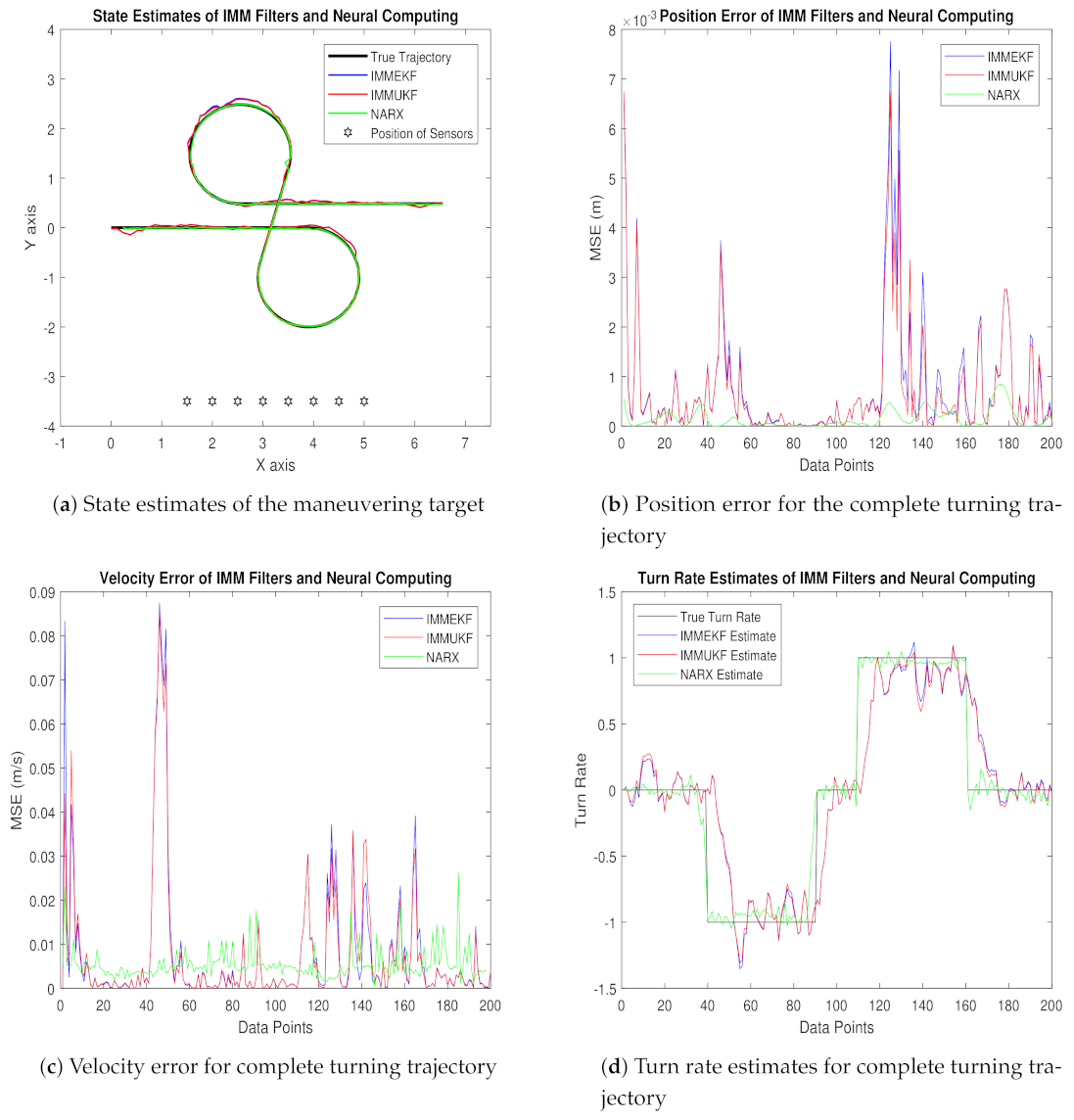
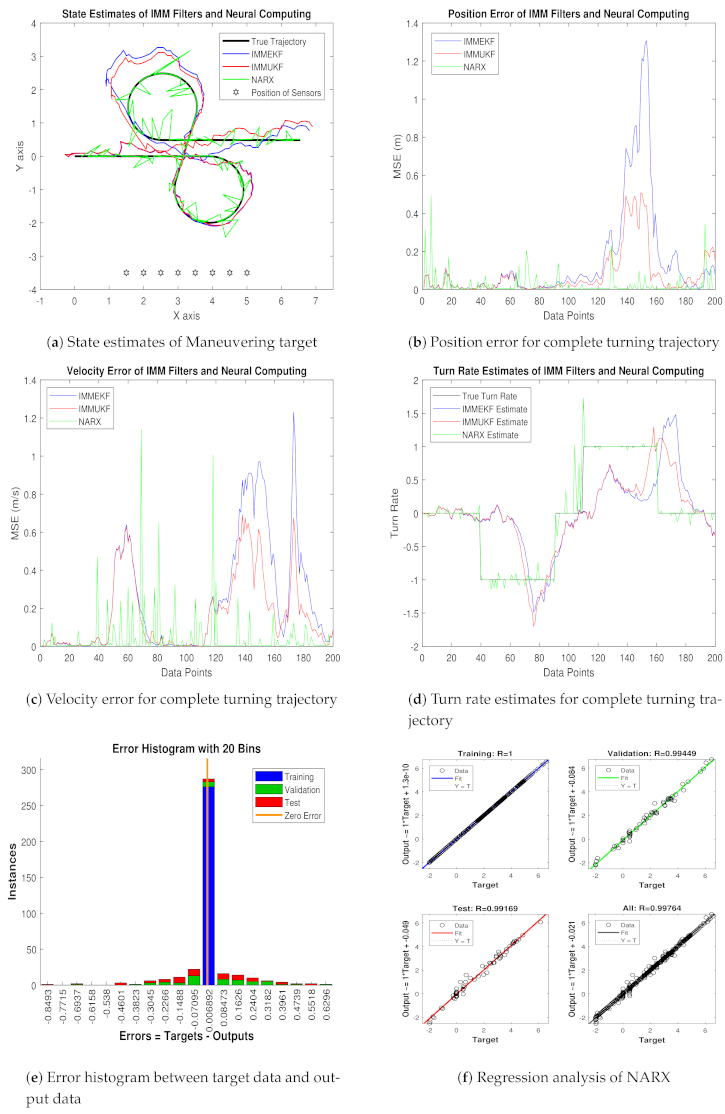
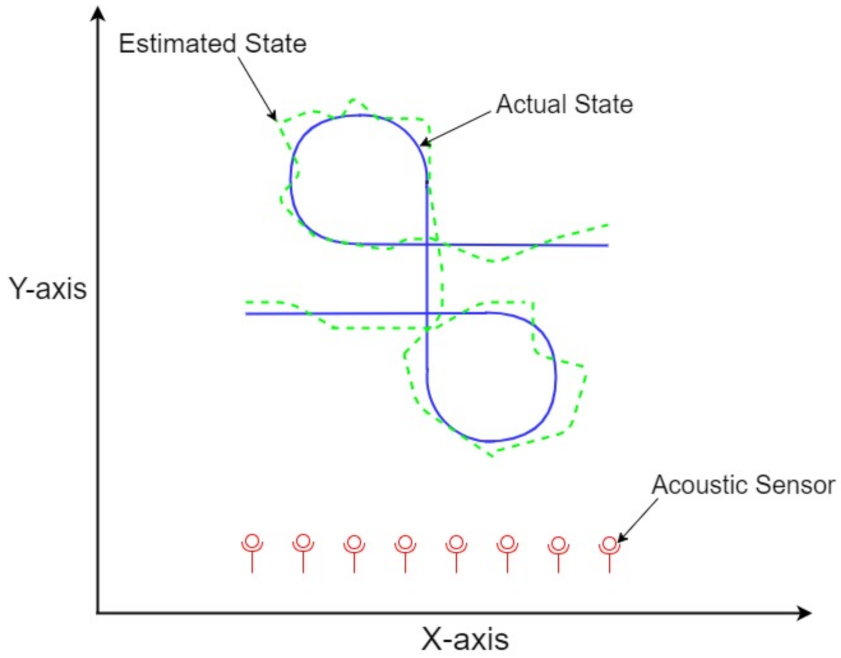
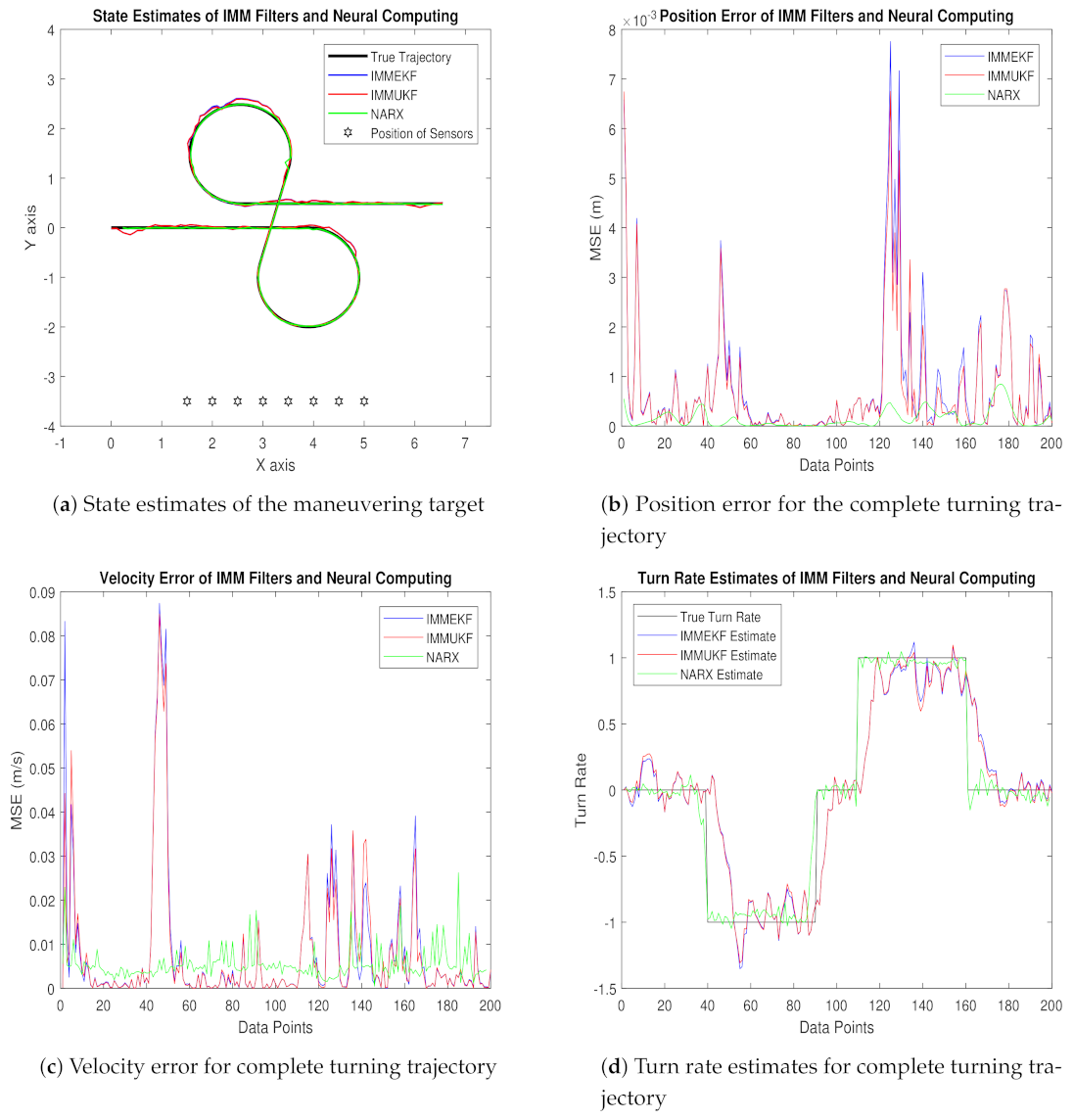
- In Figure 6a, a state estimation performance of NARX for a tracking turning trajectory of the maneuvering object is equated with GPB algorithms based on IMMEKF and IMMUKF, and it is quite vibrant that NARX is accurately tracing the actual turning path of the maneuvering target.
- Position error analysis in mean square sense is presented in Figure 6b in which NARX is showing the least error among other techniques.
- In Figure 6c, the error between true velocity and estimated velocity that is also presented in the context of MSE is shown. In this result, the NARX neural scheme is efficiently estimating true velocity compared to multiple model Kalman filters for all data points.
- Turn rate estimates of IMMEKF, IMMUKF, and NARX are illustrated in Figure 6d. Estimates of turning parameter are also validating the effectiveness of NARX over IMM filters for all data points in complete turning trajectory.
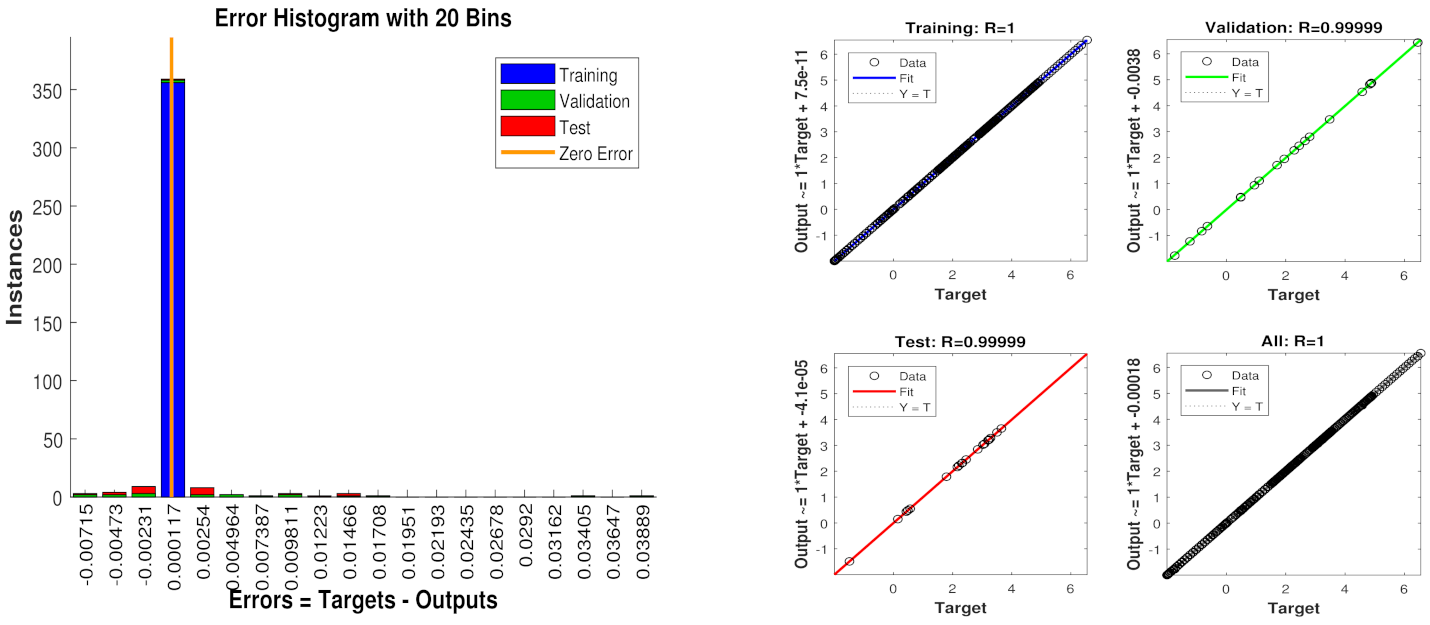
- Error histogram between target time series , and estimated output data are illustrated in Figure 6e. An error histogram consists of a set of error values that can be negative, and these define how much difference there is between estimated and target time series. In this analysis, the overall error of the NARX neuro network is divided into 20 bins that are shown in vertical bars. At the start of the histogram, a bin is unique from others having an error of 0.00017 at the height of 350 instances indicating that several points in time series have errors in this range. The zero error bar also falls on this bin which defines the zero error of the neural network.
- Regression analysis of the NARX scheme for training, validation, and testing procedure is shown in Figure 6f. The time series data set in the designed neural network is distributed in training, validation, and testing with the proportion of 75%, 15%, and 15%, respectively. This analysis integrates the statistical parameters for showing the relationship between the output variable and target variable . Here, in regression results, the true target and estimated output overlay each other. A linear trend is observed in both values that show the strength of NARX neural computing.
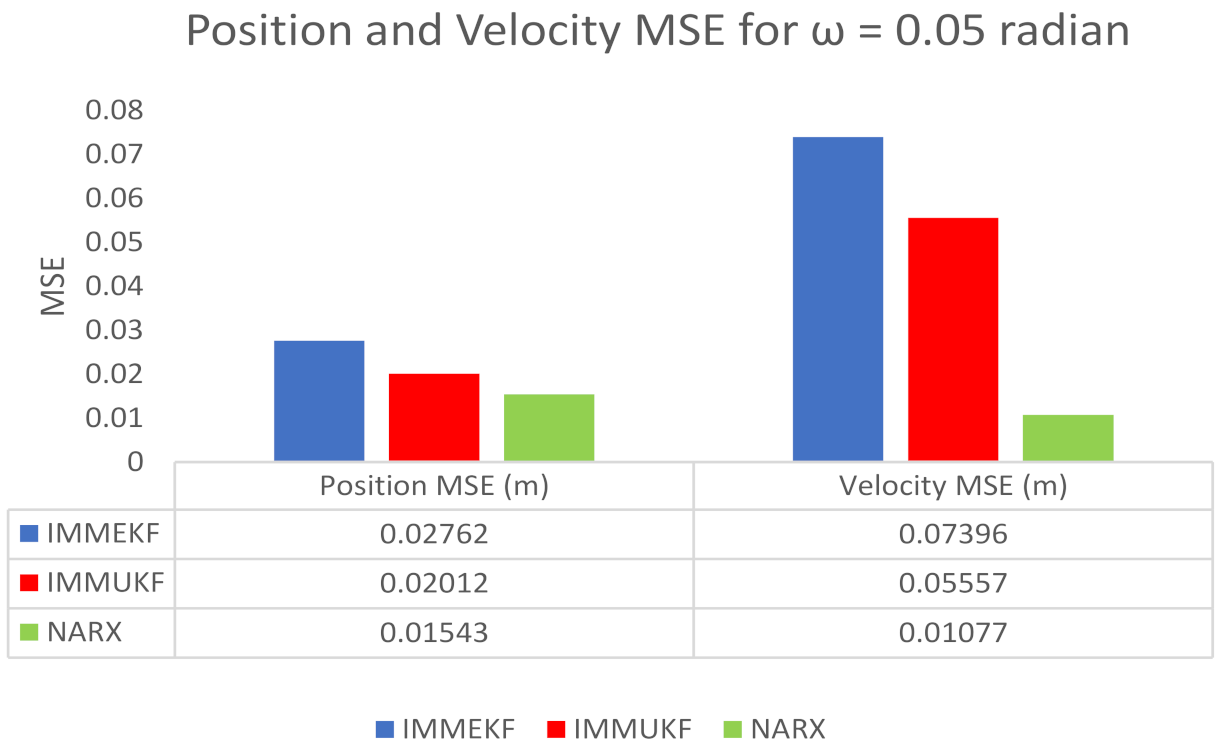
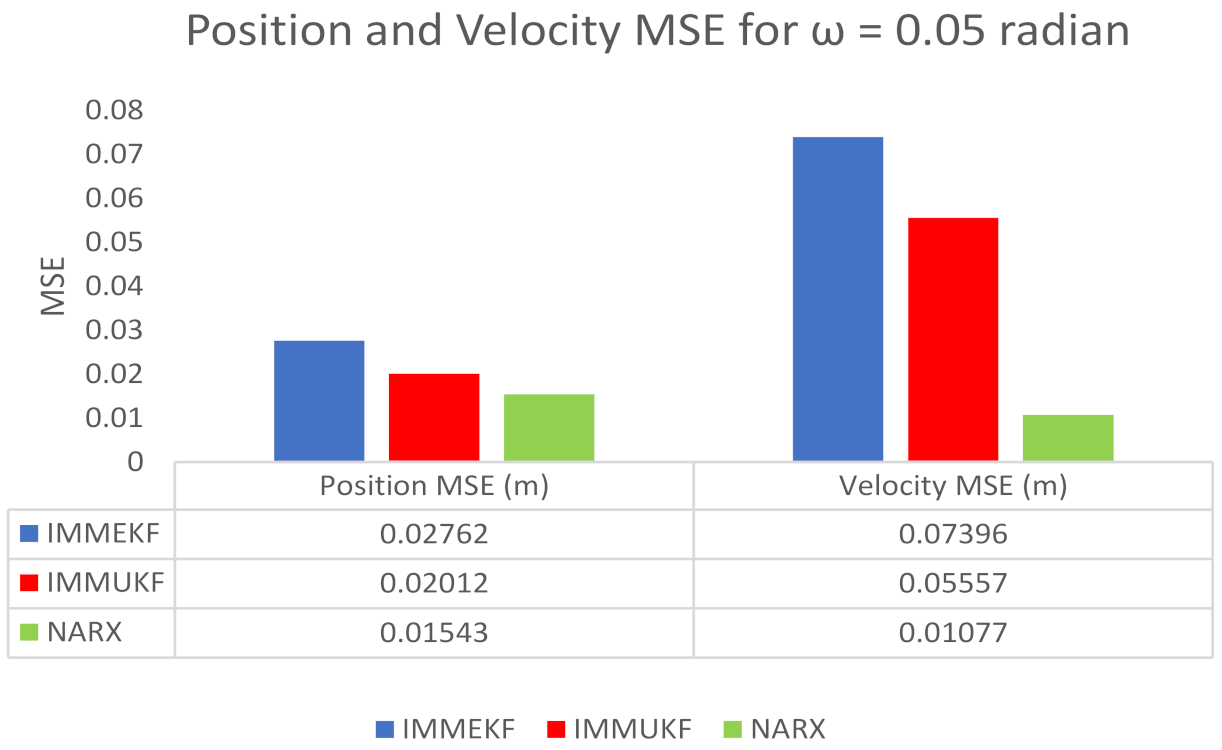
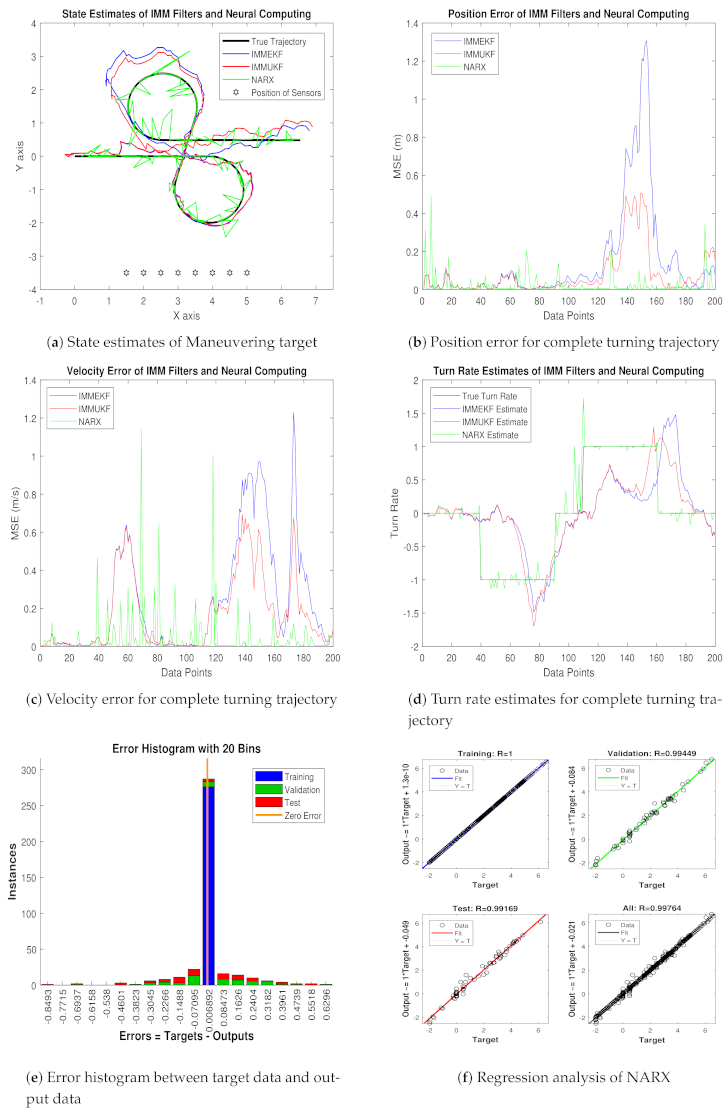
4.1.2. Case 2: The Standard Deviation of Measurement Noise = 0.05 Radian
- In Figure 8a, state estimates of all three techniques are compared for the coordinated turning trajectory of the maneuvering target. It is worth to note that, for this value of the standard deviation of measured noise, NARX is showing better state estimates and convergence than conventional nonlinear filtering methods.
- Average mean square position error among actual and predicted position of underwater maneuvering target is depicted in Figure 8b, which is representing the precision of NARX over IMMEKF and IMMUKF.
- In Figure 8c, true and estimated velocity of the maneuvering object estimated from IMM filters and NARX neural network is compared, and intelligence neural methodology is performing far better from filtering techniques.
- Figure 8d is showing turn rate estimates for this case of measurement noise in which again NARX is showing better estimates of turning parameter than existing filtering schemes.
- In Figure 8e, error histogram results are shown among target time series data set , and predicted output value of the object’s state. In the middle part of histogram, a vertical bin consists of an error of 0.002741, and the length of this for the training dataset lies around 250 instances, while the validation and testing dataset lie between 200 and 250 instances. In this case, zero error lies beneath the vertical bar with center 0.002741.
- In Figure 8f, the regression of NARX neural intelligence computing is given for training, validation, and testing procedure. In regression analysis, the effectiveness of the NARX neural network is depicted by linear behavior and the head-to-head response of the true target and estimated output.
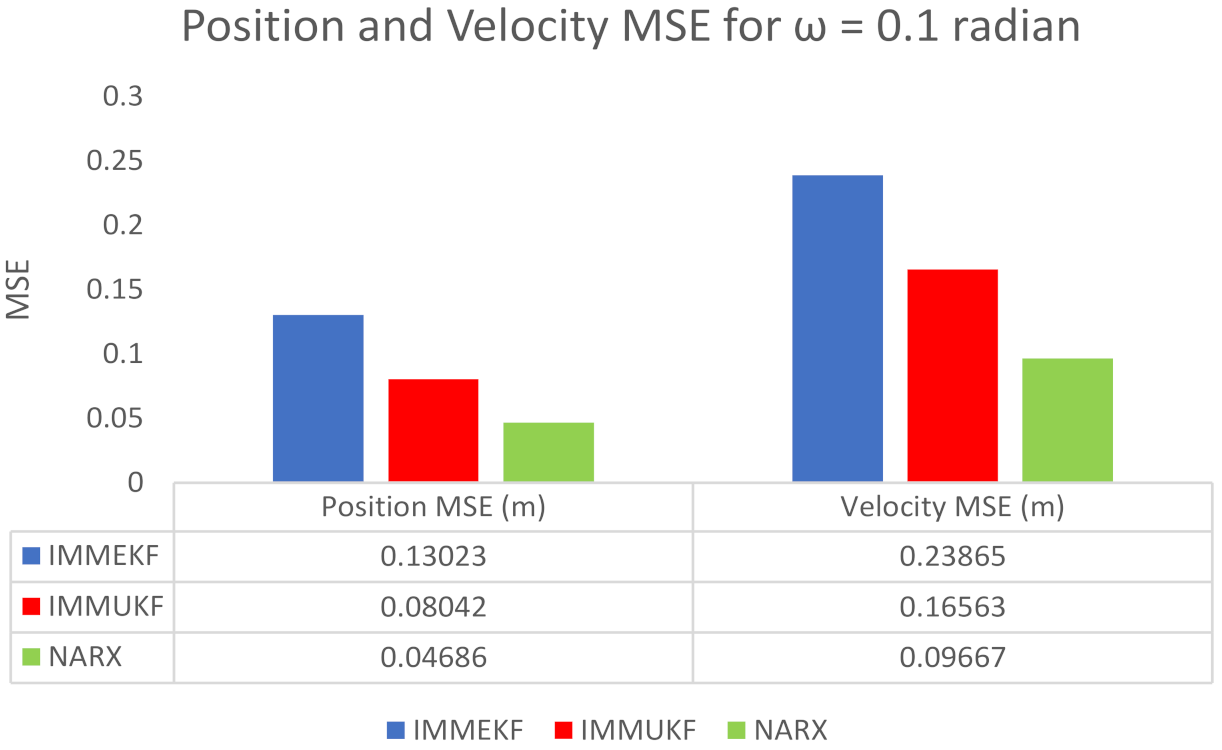
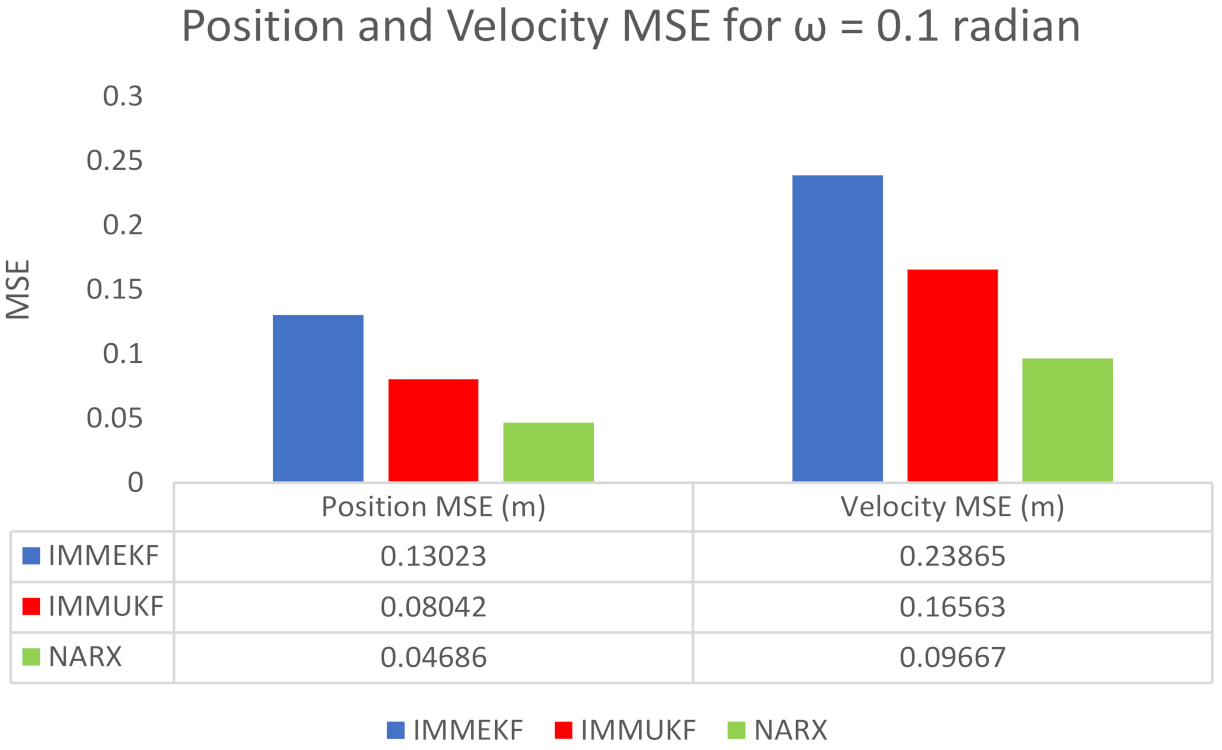
4.1.3. Case 3: The Standard Deviation of Measurement Noise = 0.1 Radian
- State prediction results in coordinated turn trajectory for all methods are given in Figure 10a, where the NARX based neural intelligence computing technique is showing better accuracy over conventional IMMEKF and IMMUKF. It can be seen that multimodel filters are experiencing more difficulty to estimate the state of the maneuvering object at turns of the trajectory than NARX, which is depicting the competency of the neural paradigm.
- Real-time positions errors of IMM filters and NARX are shown in Figure 10b in the context of the mean square. In this result, the accuracy of NARX is also better from other methods for all samples of turning trajectory.
- In Figure 10c, the velocity error of maneuvering object from all algorithms is shown in meter per second for all data points. The middle of the trajectory performance of NARX is not satisfactory, but, at the start and at the end of data points, NARX shows better performance than IMM filters.
- Turn rate estimates of all algorithms are presented in Figure 10d in which the estimation performance of neural computing is far better from Kalman filters.
- A comparative analysis among target time series , and the estimated value of target’s dynamics in the form of the histogram is represented in Figure 10e. A vertical bar incorporating an error of 0.006892 is shown in the center of the histogram. The height of this vertical bin for the training process is near 300 instances, whereas validation and testing dataset appears between 250 and 300 instances. Zero error for this analysis lies under the vertical bin with a value of 0.006892.
- Regression phenomena in graphical form for the procedures of training, validation, and testing are explained in Figure 10f. In this graph, a minimum divergence between target and output value is noted, which is because of an increment in the standard deviation of measured noise.
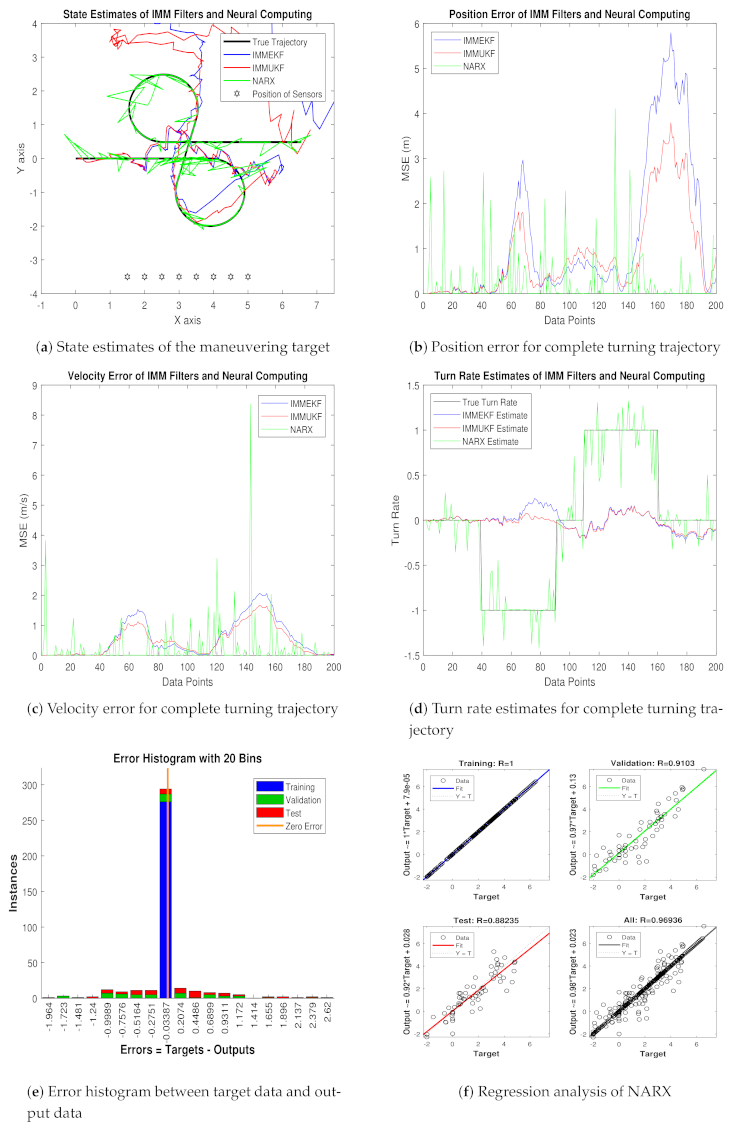
4.1.4. Case 4: The Standard Deviation of Measurement Noise = 0.5 Radian
- In Figure 12a, state estimates of IMMEKF, IMMUKF, and NARX are presented in which the amount of measurement noise is high so all algorithms are experiencing difficulties to follow the real trajectory. However, even in the noisy atmosphere, it is seen that estimates of NARX are approaching a real trajectory more than the two other given algorithms.
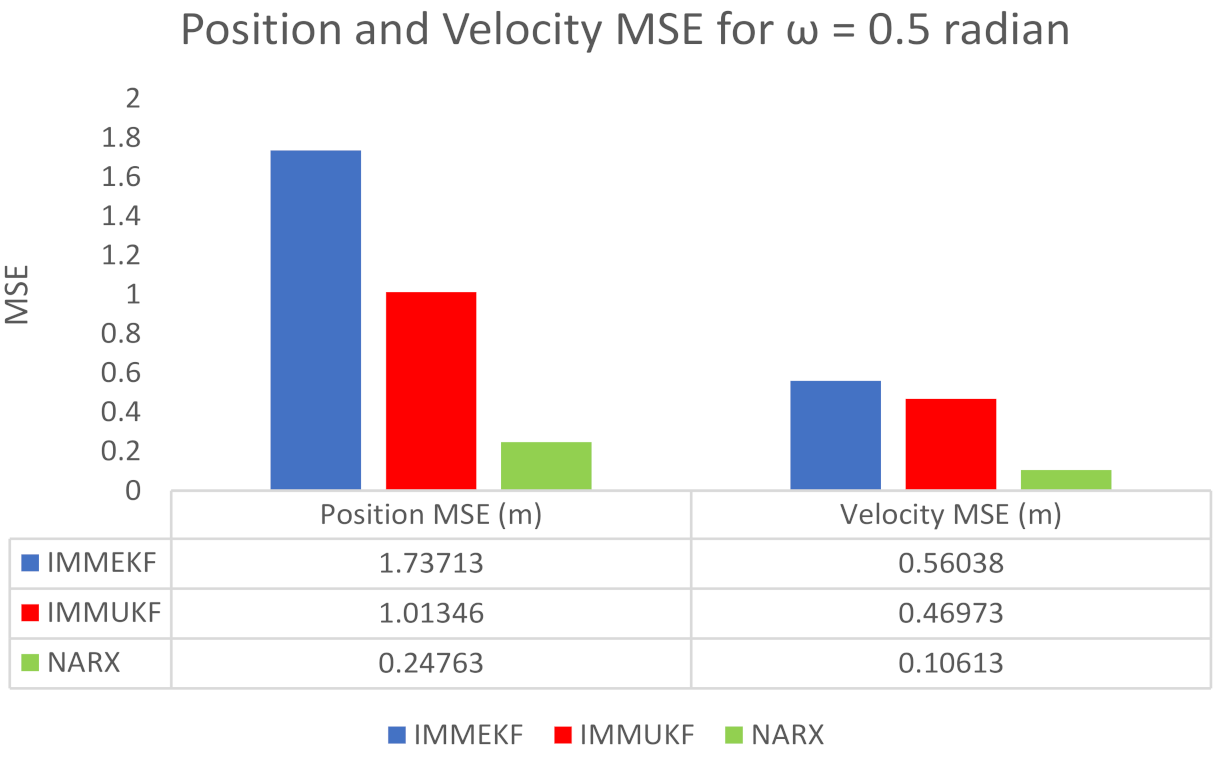
- Average MSE among actual and predicted position of the maneuvering object is represented in Figure 12b, which is also showing that all algorithms have enough amount of error, but from a comparative point of view, NARX is estimating turning trajectory with less position error than IMMEKF and IMMUKF.
- In Figure 12c, velocity error from all methodologies is shown, which is also validating the strength of the neural network.
- Turn rate estimates in this case are presented in Figure 12d in which the estimation performance of neural computing is also better from IMM filtering methods.
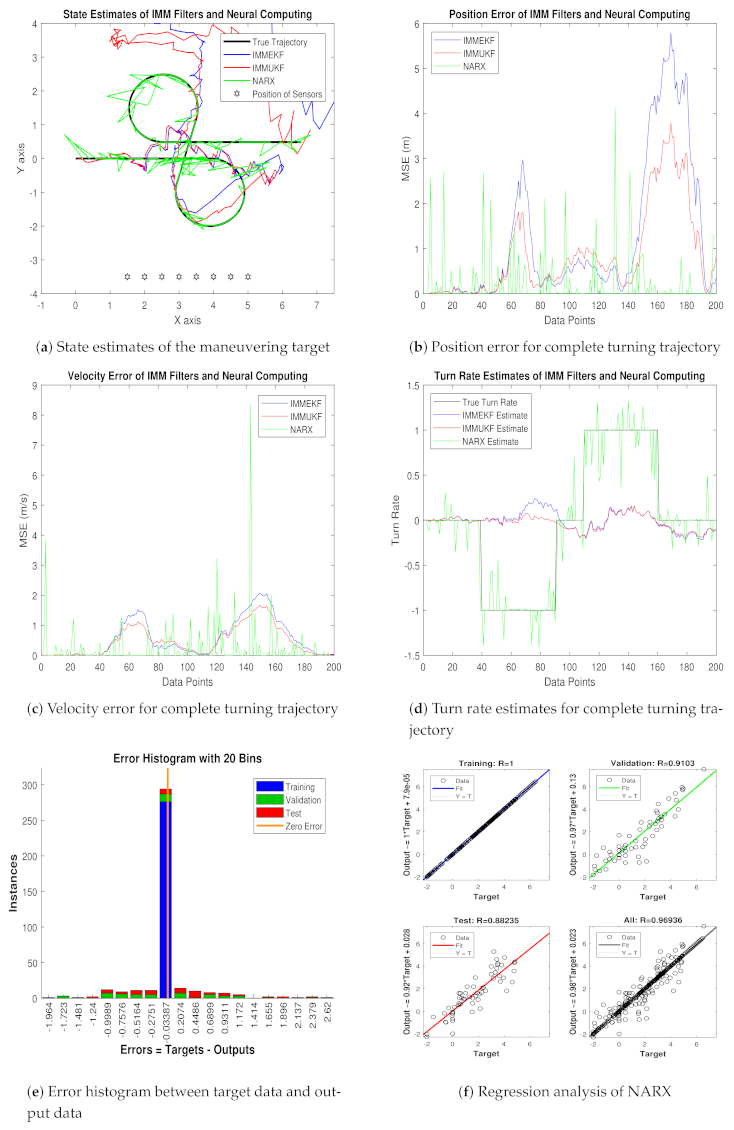
- An error histogram among target values , and output estimated value of target’s state is shown in Figure 12e. An error value −0.03387 in a vertical bin appears at the center of the histogram which has a height of close to 300 data points for the training dataset, while validation and testing datasets fall among 250 and 300 data sets. The zero error line on the error axis lies beneath the vertical with center −0.03387 in the given error histogram.
- Regression in this case is given in Figure 12f which is showing a sufficient amount of divergence between the true target and estimated output because of the increase in the standard deviation of measured noise.
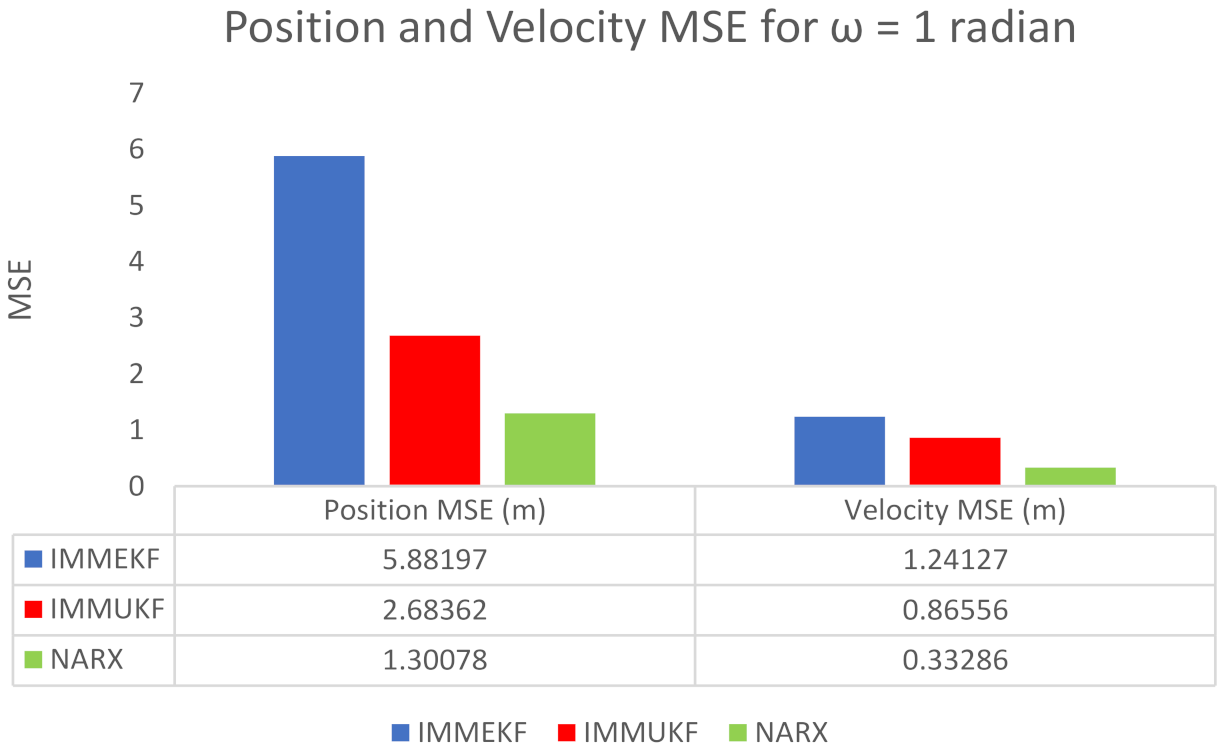
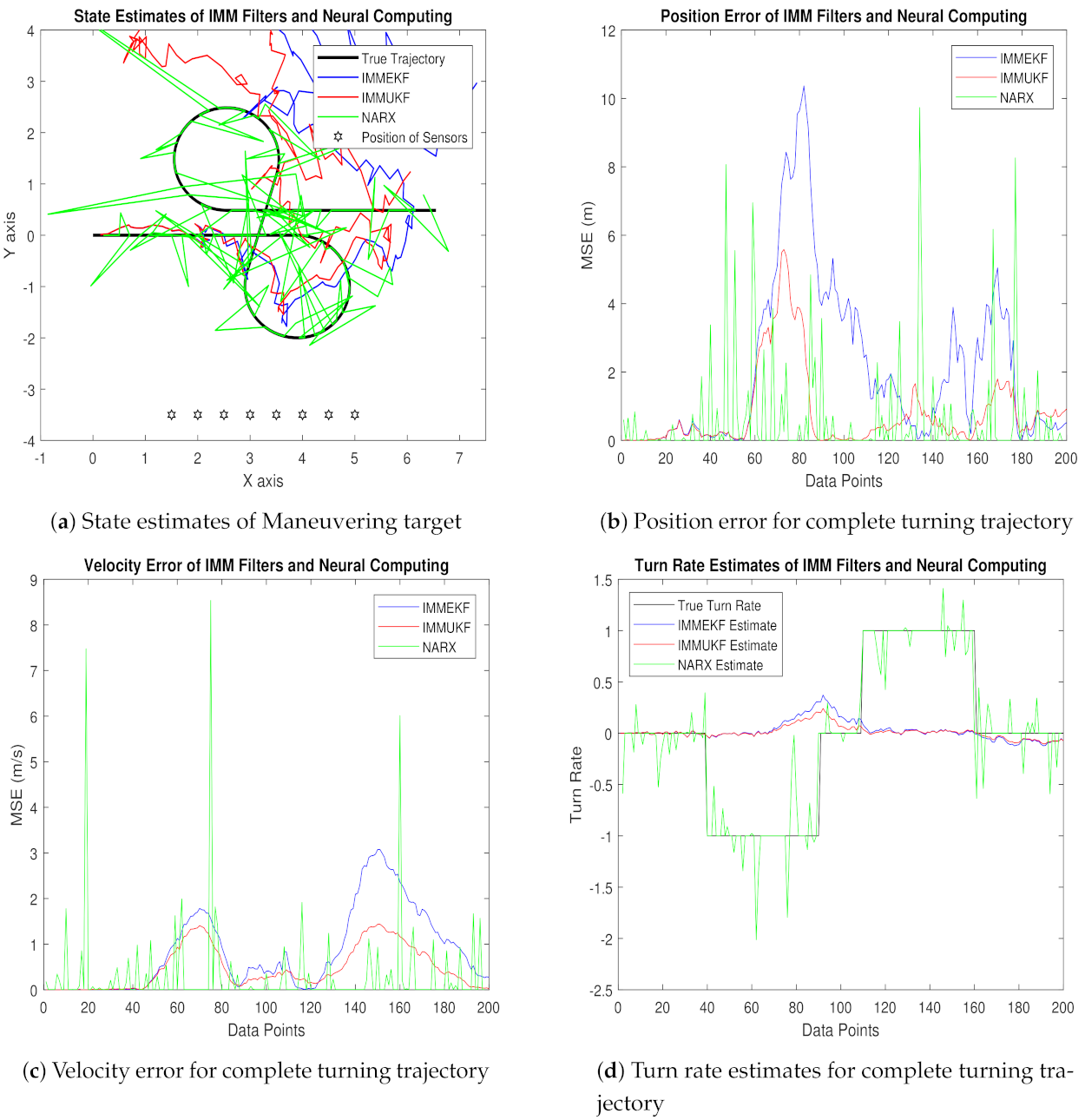
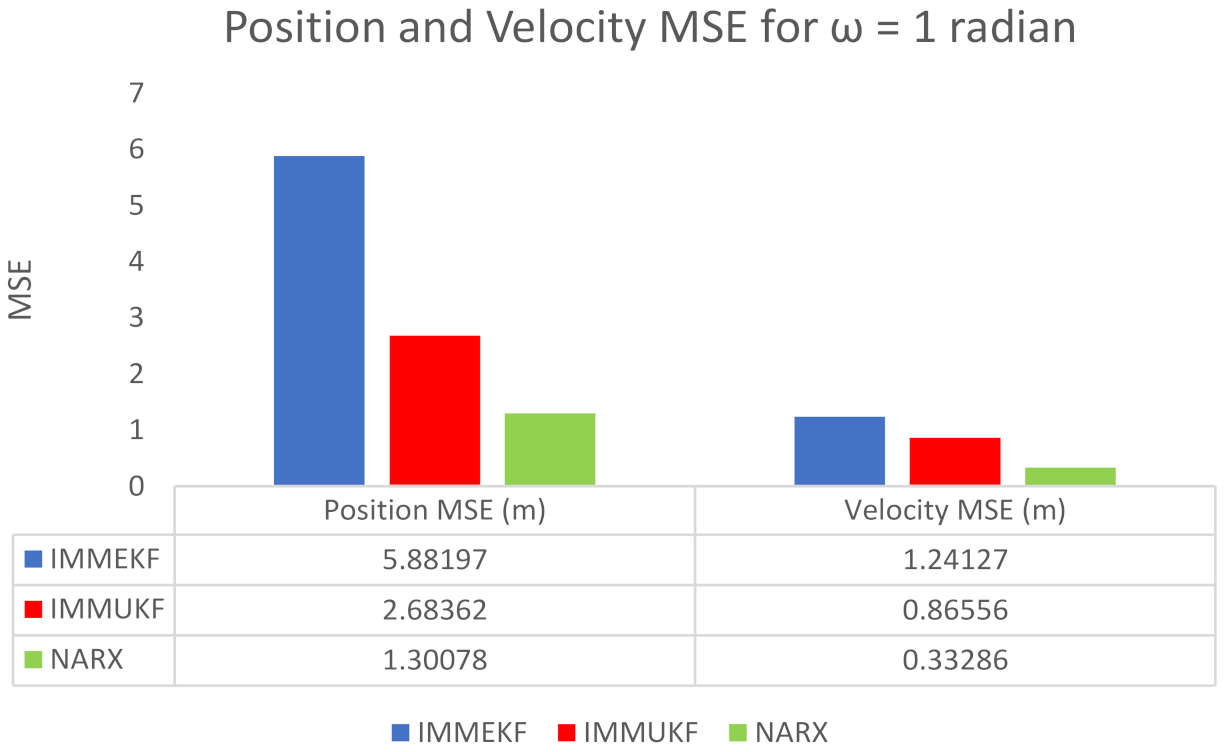
4.1.5. Case 5: The Standard Deviation of Measurement Noise = 1 Radian
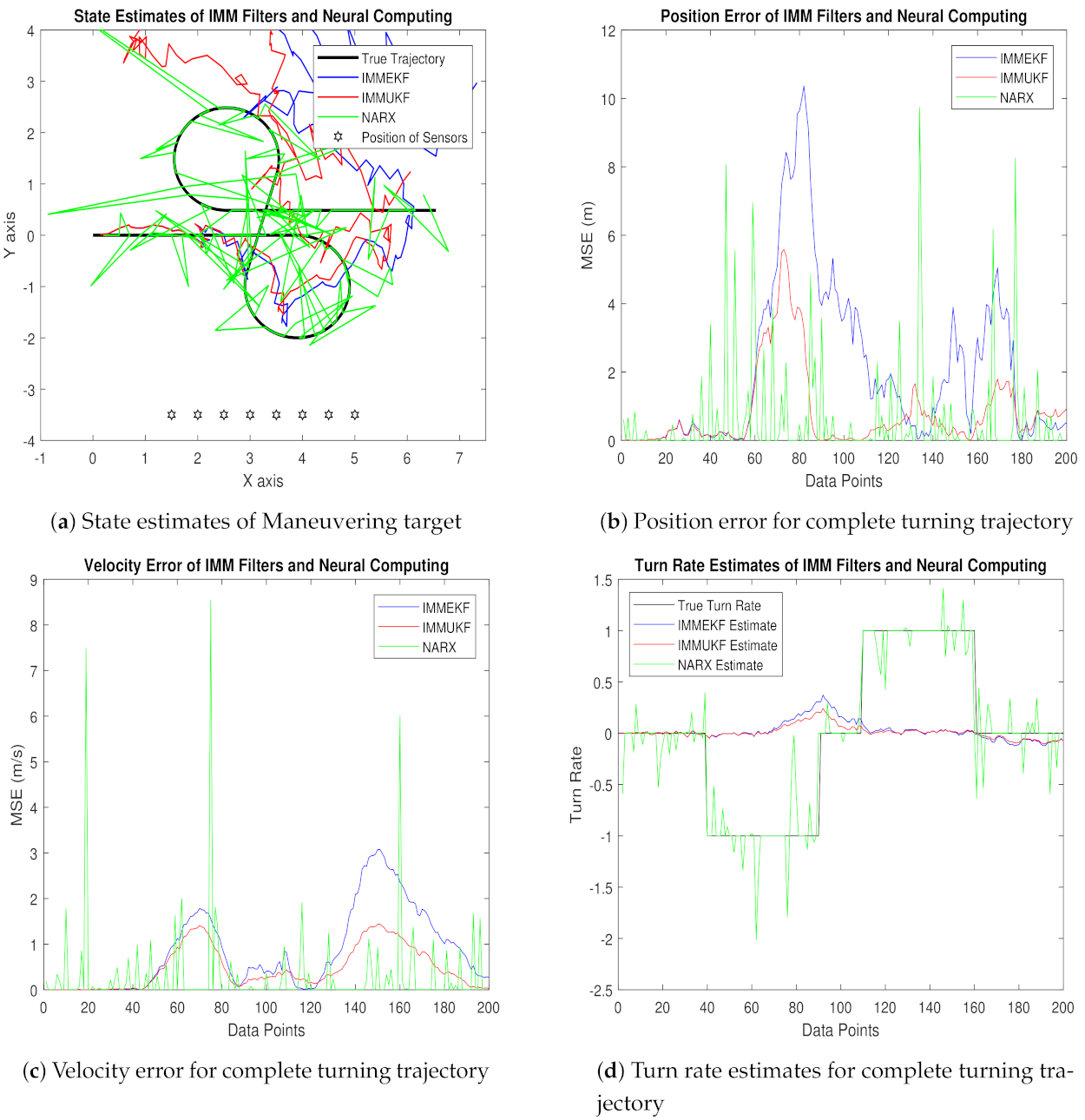
- State estimates of IMMEKF, IMMUKF, and NARX in this case are presented in Figure 14a. State estimation results from all algorithms are diverging because of an extremely noisy underwater environment. All algorithms are facing severe difficulties in tracking true trajectory, but, in comparison, neural computing methodology NARX is performing better to estimate turning trajectory than the other two algorithms in this case.
- Average real-time error among the actual and predicted position of underwater maneuvering object is represented in Figure 14b in the form of MSE, which is clearly indicating that the NARX neural network is producing less position error as compared to IMMEKF and IMMUKF.
- In Figure 14c, velocity error results from all techniques are shown in which NARX is experiencing some large peaks but overall has better performance from IMM filters.
- Turn rate estimates in this case are representing in Figure 14d in which NARX is better estimating the turning parameter.
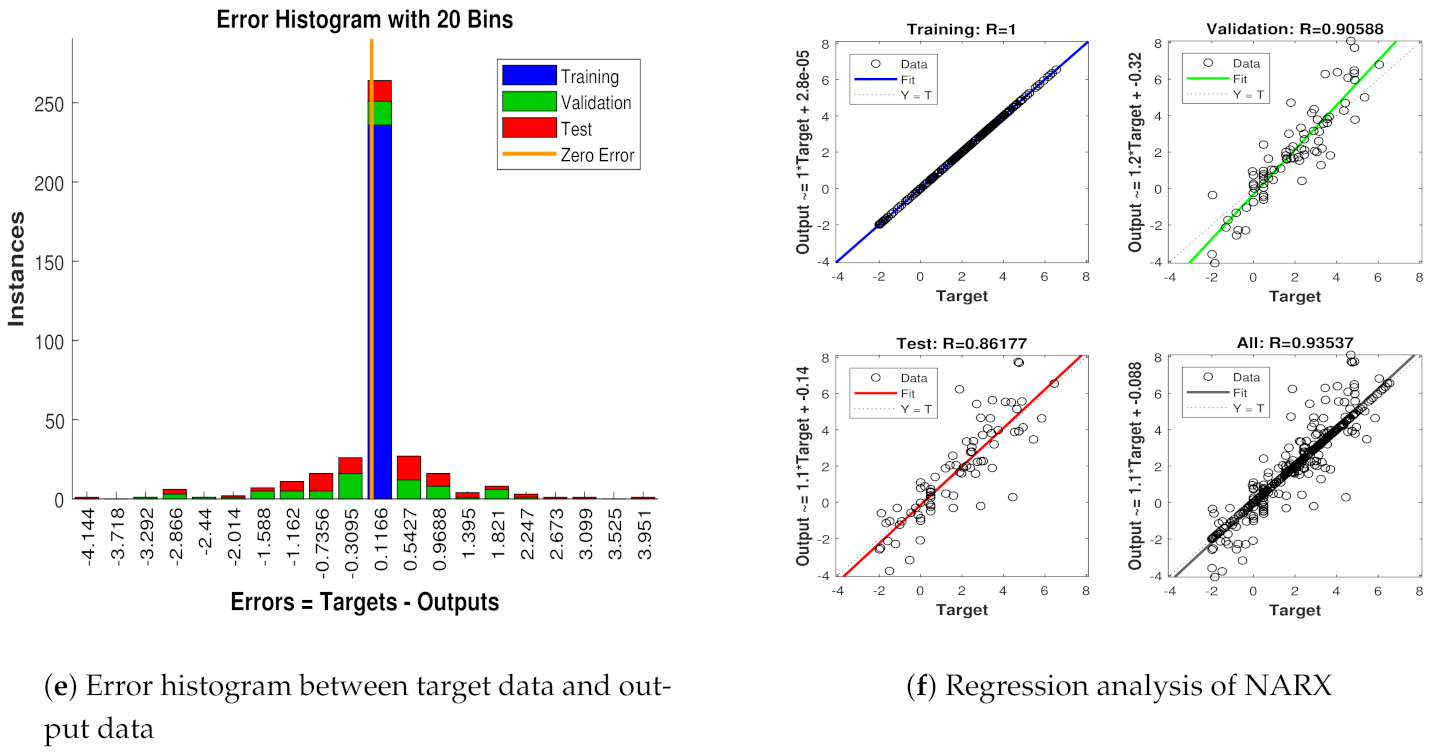
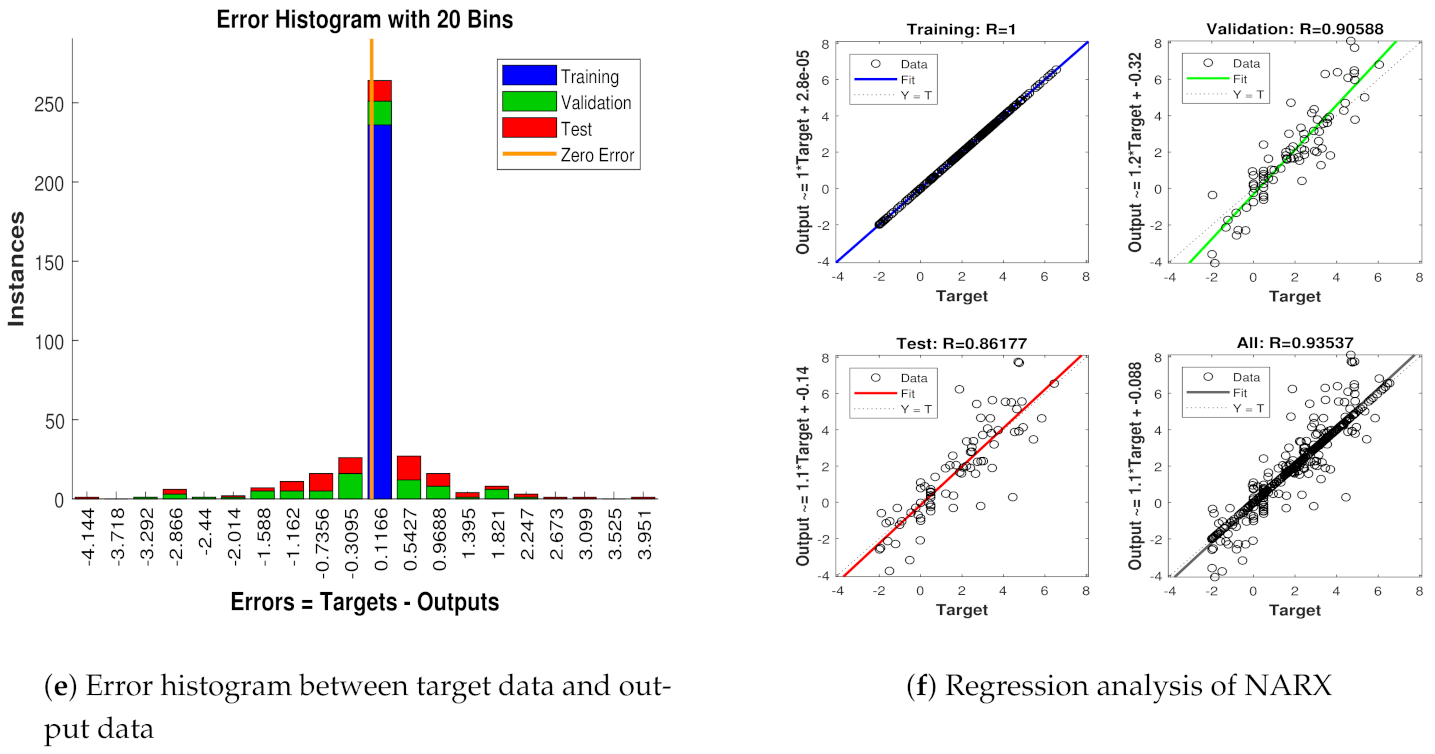
- An analysis of neural network in the form of error histogram is represented in Figure 14e among target dataset , and predicted output . A vertical bin is observed having an error of 0.1166 with a height near 250 steps for training while validation and testing datasets have a height between 200 and 250 steps. The zero error point lies at 0.1166 beneath the vertical bin.
- The regression of the NARX neural network between target and estimated output in this case is represented in Figure 14f. In regression results, a sufficient divergence is observed among the target and estimated results. This is because of a higher value of Gaussian noise involved in the state estimation system.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Konrad, T.; Gehrt, J.-J.; Lin, J.; Zweigel, R.; Abel, D. Advanced state estimation for navigation of automated vehicles. Annu. Rev. Control 2018, 46, 181–195. [Google Scholar] [CrossRef]
- Hu, S.; Zhou, J.; Chen, C. State estimation for dynamic systems with unknown process inputs and applications. IEEE Access 2018, 6, 14857–14869. [Google Scholar] [CrossRef]
- Hu, J.; Liu, G.-P.; Zhang, H.; Liu, H. On state estimation for nonlinear dynamical networks with random sensor delays and coupling strength under event-based communication mechanism. Inf. Sci. 2020, 511, 265–283. [Google Scholar] [CrossRef]
- Smiley, A.J.; Harrison, W.K.; Plett, G.L. Postprocessing the outputs of an interacting multiple-model Kalman filter using a Markovian trellis to estimate parameter values of aged Li-ion cells. J. Energy Storage 2020, 27, 101043. [Google Scholar] [CrossRef]
- Zhang, H.; Li, L.; Xie, W. Constrained multiple model particle filtering for bearings-only maneuvering target tracking. IEEE Access 2018, 6, 51721–51734. [Google Scholar] [CrossRef]
- Marzbani, H.; Khayyam, H.; To, C.N.; Quoc, Đ.V.; Jazar, R.N. Autonomous vehicles: Autodriver algorithm and vehicle dynamics. IEEE Trans. Veh. Technol. 2019, 68, 3201–3211. [Google Scholar] [CrossRef]
- Khalid, S.S.; Abrar, S. A low-complexity interacting multiple model filter for maneuvering target tracking. AEU Int. J. Electron. Commun. 2017, 73, 157–164. [Google Scholar] [CrossRef] [Green Version]
- Rudenko, A.; Palmieri, L.; Herman, M.; Kitani, K.M.; Gavrila, D.M.; Arras, K.O. Human motion trajectory prediction: A survey. Int. J. Robot. Res. 2020, 39, 895–935. [Google Scholar] [CrossRef]
- Luo, J.; Han, Y.; Fan, L. Underwater acoustic target tracking: A review. Sensors 2018, 18, 112. [Google Scholar] [CrossRef] [Green Version]
- Song, H.; Hu, S. Effect of Faults on Kalman Filter of State Vectors in Linear Systems. Technology 2019, 5, 45–56. [Google Scholar] [CrossRef]
- Patel, Z.; Boje, E. A Hybrid, Coupled Approach to the Continuous-Discrete Kalman Filter. IEEE Control Syst. Lett. 2020, 5, 827–832. [Google Scholar] [CrossRef]
- You, S.; Diao, M.; Gao, L.; Zhang, F.; Wang, H. Target tracking strategy using deep deterministic policy gradient. Appl. Soft Comput. 2020, 95, 106490. [Google Scholar] [CrossRef]
- Nguyen, N.H.; Doğançay, K. Instrumental variable based Kalman filter algorithm for three-dimensional AOA target tracking. IEEE Signal Process. Lett. 2018, 25, 1605–1609. [Google Scholar] [CrossRef]
- Karsaz, A.; Adineh, A. Innovative Hybrid Backward Input Estimation and Data Fusion for High Maneuvering Target Tracking. Int. J. Ind. Electron. Control Optim. 2019, 2, 305–318. [Google Scholar]
- Hadaegh, M.R.; Khaloozadeh, H.; Beheshti, M.T.H. Modification of Standard Kalman Filter Based on Augmented Input Estimation and Deadbeat Dissipative FIR Filtering. IETE J. Res. 2020, 1–12. [Google Scholar] [CrossRef]
- Ali, W.; Li, Y.; Raja, M.A.Z.; Ahmed, N. Generalized pseudo Bayesian algorithms for tracking of multiple model underwater maneuvering target. Appl. Acoust. 2020, 166, 107345. [Google Scholar] [CrossRef]
- Ahn, C.K.; Shi, P.; Shmaliy, Y.; Liu, F. Bayesian state estimation for Markovian jump systems: Employing recursive steps and pseudocodes. IEEE Syst. Man, Cybern. Mag. 2019, 5, 27–36. [Google Scholar]
- Samuel, K.; Choi, J. Improved IMM filter for tracking a highly maneuvering target with mixed system noises. Int. J. Control Autom. Syst. 2018, 16, 2763–2771. [Google Scholar] [CrossRef]
- Cho, S.Y.; Ju, H.; Cha, J.; Park, C.G.; Yoo, K.; Park, C. IMM-based INS/EM-Log Integrated Underwater Navigation with Sea Current Estimation Function. J. Position Navig. Timing 2018, 7, 165–173. [Google Scholar]
- Soken, H.E.; Sakai, S.-I. A new likelihood approach to autonomous multiple model estimation. ISA Trans. 2020, 99, 50–58. [Google Scholar] [CrossRef]
- Liu, H.; Xia, L.; Wang, C. Maneuvering target tracking using simultaneous optimization and feedback learning algorithm based on Elman neural network. Sensors 2019, 19, 1596. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ali, W.; Li, Y.; Chen, Z.; Raja, M.A.Z.; Ahmed, N.; Chen, X. Application of spherical-radial cubature bayesian filtering and smoothing in bearings only passive target tracking. Entropy 2019, 21, 1088. [Google Scholar] [CrossRef] [Green Version]
- Raptodimos, Y.; Lazakis, I. Application of NARX neural network for predicting marine engine performance parameters. Ships Offshore Struct. 2020, 15, 443–452. [Google Scholar] [CrossRef]
- Peng, J.; Tang, Q. Application of NARX Dynamic Neural Network in Quantitative Investment Forecasting System. In Proceedings of the International Symposium on Intelligence Computation and Applications, Guangzhou, China, 16–17 November 2019; pp. 628–635. [Google Scholar]
- Mehmood, A.; Zameer, A.; Ling, S.H.; ur Rehman, A.; Raja, M.A.Z. Integrated computational intelligent paradigm for nonlinear electric circuit models using neural networks, genetic algorithms and sequential quadratic programming. Neural Comput. Appl. 2020, 32, 10337–10357. [Google Scholar] [CrossRef]
- Waseem, W.; Sulaiman, M.; Kumam, P.; Shoaib, M.; Raja, M.A.Z.; Islam, S. Investigation of singular ordinary differential equations by a neuroevolutionary approach. PLoS ONE 2020, 15, e0235829. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, I.; Raja, M.A.Z.; Bilal, M.; Ashraf, F. Bio-inspired computational heuristics to study Lane–Emden systems arising in astrophysics model. SpringerPlus 2016, 5, 1866. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Raja, M.A.Z.; Shah, F.H.; Tariq, M.; Ahmad, I. Design of artificial neural network models optimized with sequential quadratic programming to study the dynamics of nonlinear Troesch’s problem arising in plasma physics. Neural Comput. Appl. 2018, 29, 83–109. [Google Scholar] [CrossRef]
- Sabir, Z.; Manzar, M.A.; Raja, M.A.Z.; Sheraz, M.; Wazwaz, A.M. Neuro-heuristics for nonlinear singular Thomas-Fermi systems. Appl. Soft Comput. 2018, 65, 152–169. [Google Scholar] [CrossRef]
- Ahmad, I.; Raja, M.A.Z.; Bilal, M.; Ashraf, F. Neural network methods to solve the Lane–Emden type equations arising in thermodynamic studies of the spherical gas cloud model. Neural Comput. Appl. 2017, 28, 929–944. [Google Scholar] [CrossRef]
- Raja, M.A.Z.; Mehmood, A.; ur Rehman, A.; Khan, A.; Zameer, A. Bio-inspired computational heuristics for Sisko fluid flow and heat transfer models. Appl. Soft Comput. 2018, 71, 622–648. [Google Scholar] [CrossRef]
- Ahmad, I.; Ahmad, F.; Raja, M.A.Z.; Ilyas, H.; Anwar, N.; Azad, Z. Intelligent computing to solve fifth-order boundary value problem arising in induction motor models. Neural Comput. Appl. 2018, 29, 449–466. [Google Scholar] [CrossRef]
- Raja, M.A.Z.; Niazi, S.A.; Butt, S.A. An intelligent computing technique to analyze the vibrational dynamics of rotating electrical machine. Neurocomputing 2017, 219, 280–299. [Google Scholar] [CrossRef]
- Khan, J.A.; Raja, M.A.Z.; Rashidi, M.M.; Syam, M.I.; Wazwaz, A.M. Nature-inspired computing approach for solving nonlinear singular Emden–Fowler problem arising in electromagnetic theory. Connect. Sci. 2015, 27, 377–396. [Google Scholar] [CrossRef]
- Bukhari, A.H.; Sulaiman, M.; Islam, S.; Shoaib, M.; Kumam, P.; Raja, M.A.Z. Neuro-fuzzy modeling and prediction of summer precipitation with application to different meteorological stations. Alex. Eng. J. 2020, 59, 101–116. [Google Scholar] [CrossRef]
- Ahmad, I.; Ahmad, S.; Awais, M.; Ahmad, S.U.I.; Raja, M.A.Z. Neuro-evolutionary computing paradigm for Painlevé equation-II in nonlinear optics. Eur. Phys. J. Plus 2018, 133, 184. [Google Scholar] [CrossRef]
- Sabir, Z.; Wahab, H.A.; Umar, M.; Sakar, M.G.; Raja, M.A.Z. Novel design of Morlet wavelet neural network for solving second order Lane–Emden equation. Math. Comput. Simul. 2020, 172, 1–14. [Google Scholar] [CrossRef]
- Raja, M.A.Z.; Umar, M.; Sabir, Z.; Khan, J.A.; Baleanu, D. A new stochastic computing paradigm for the dynamics of nonlinear singular heat conduction model of the human head. Eur. Phys. J. Plus 2018, 133, 364. [Google Scholar] [CrossRef]
- Mehmood, A.; Zameer, A.; Ling, S.H.; Raja, M.A.Z. Design of neuro-computing paradigms for nonlinear nanofluidic systems of MHD Jeffery–Hamel flow. J. Taiwan Inst. Chem. Eng. 2018, 91, 57–85. [Google Scholar] [CrossRef]
- Carrera, D.A.; Mayorga, R.V.; Peng, W. A Soft Computing Approach for group decision-making: A supply chain management application. Appl. Soft Comput. 2020, 91, 106201. [Google Scholar] [CrossRef]
- Solanki, V.; Joshi, M. Energy Efficient NARX Model for Target Tracking in Wireless Sensor Network. In Proceedings of the 2018 3rd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), Bangalore, India, 18–19 May 2018; pp. 260–265. [Google Scholar]
- Liu, J.; Li, T.; Zhang, Z.; Chen, J. NARX prediction-based parameters online tuning method of intelligent PID system. IEEE Access 2020, 8, 130922–130936. [Google Scholar] [CrossRef]
- Rangel, E.; Cadenas, E.; Campos-Amezcua, R.; Tena, J.L. Enhanced Prediction of Solar Radiation Using NARX Models with Corrected Input Vectors. Energies 2020, 13, 2576. [Google Scholar] [CrossRef]
- Hatata, A.Y.; Eladawy, M. Prediction of the true harmonic current contribution of nonlinear loads using NARX neural network. Alex. Eng. J. 2018, 57, 1509–1518. [Google Scholar] [CrossRef]
- Chen, D.; Wang, T.; Yuan, P.; Sun, N.; Tang, H. A positional error compensation method for industrial robots combining error similarity and radial basis function neural network. Meas. Sci. Technol. 2019, 30, 125010. [Google Scholar] [CrossRef]
- Jahan, K.; Rao, S.K. Implementation of underwater target tracking techniques for Gaussian and non-Gaussian environments. Comput. Electr. Eng. 2020, 87, 106783. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Appropriate Values |
|---|---|
| Starting state of the target | = |
| Localization function of sensors | |
| Total sensors | e = 8 |
| Distance between sensors | 0.5 |
| Values of Standard deviation of measured noise | radians |
| Process noise variance of WPV model | = 0.05 |
| Process noise variance of CT model | = 0.15 |
| Sampling space | = 0.1 s |
| Input and output delays | , = 2 |
| Total sample points | 200 |
| Hidden neurons | 100 |
| NARX target steps | 1000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, W.; Li, Y.; Raja, M.A.Z.; Khan, W.U.; He, Y. State Estimation of an Underwater Markov Chain Maneuvering Target Using Intelligent Computing. Entropy 2021, 23, 1124. https://doi.org/10.3390/e23091124
Ali W, Li Y, Raja MAZ, Khan WU, He Y. State Estimation of an Underwater Markov Chain Maneuvering Target Using Intelligent Computing. Entropy. 2021; 23(9):1124. https://doi.org/10.3390/e23091124
Chicago/Turabian StyleAli, Wasiq, Yaan Li, Muhammad Asif Zahoor Raja, Wasim Ullah Khan, and Yigang He. 2021. "State Estimation of an Underwater Markov Chain Maneuvering Target Using Intelligent Computing" Entropy 23, no. 9: 1124. https://doi.org/10.3390/e23091124
APA StyleAli, W., Li, Y., Raja, M. A. Z., Khan, W. U., & He, Y. (2021). State Estimation of an Underwater Markov Chain Maneuvering Target Using Intelligent Computing. Entropy, 23(9), 1124. https://doi.org/10.3390/e23091124