
Constrained Active Fault Tolerant Control Based on Active Fault Diagnosis and Interpolation Optimization


Abstract
:1. Introduction
- (i)
- In terms of the implementation of AFD in AFTC, the test inputs used for modal separation are usually optimized online. For the small-scale systems, such computational requirements can be satisfied. However, as the number of system dimensions increases, the computational burden tends to become heavier, which often results in much longer delays of correct fault mode isolation. Recently, an effective solution was proposed in [27], where an implicit expression of the residual limit set is adopted and a constant auxiliary signal and the associated separation hyperplane used to separate the potential system modes are constructed offline. After a fault is detected, only the constant test signal is injected into the system and the current diagnostic observer. Then, the true system mode can be isolated by discriminating the position of the generated residuals in relation to the previously computed separation hyperplane. Given its advantages, such as simple implementation and fast isolation, this approach can provide an effective perspective for the design of control reconfigurations. Therefore, this paper will first attempt to adapt this active fault isolation approach to be integrated into the framework of AFTC to provide critical modal update information for timely regulation of constrained systems.
- (ii)
- In terms of the design of constrained active reconfiguration FTC, most MPC-based methods need to solve computationally intensive optimization problems online. Generally, this often places stringent requirements on the system scale, sample interval, and hardware controller performance. As an alternative solution to constrained optimization, the interpolation control (IC) methods exhibit excellent features [28,29,30]. The main idea is to optimize an interpolation coefficient in real time based on the updated system states and use this coefficient to make a smooth convex combination of a outer controller and a inner controller. The outer controller is used to enlarge the controllable feasible domain, while the inner controller is used to satisfy the given control performance requirements. In general, the inner controller is optimally designed offline, while the outer controller is determined online simultaneously when the interpolation coefficient is optimized. This method of offline designing some parameters of the controller in advance helps to reduce the online calculation burden. Moreover, the optimized interpolation coefficient enables a smooth transition between the inner–outer controllers and ensures a fast convergence of the states to the set point under the constraints. In particular, the associated optimization problem belongs to standard linear programming (LP), which can be readily solved in the practical implementation. Given these characteristics, the IC-based optimization can provide a good compromise among computational load, feasible region size, performance, etc. Therefore, the development of the IC strategy to solve the constrained AFTC problem would be very promising. To the authors’ knowledge, no relevant results have been reported.
2. System Description and Problem Formulation
3. Main Results
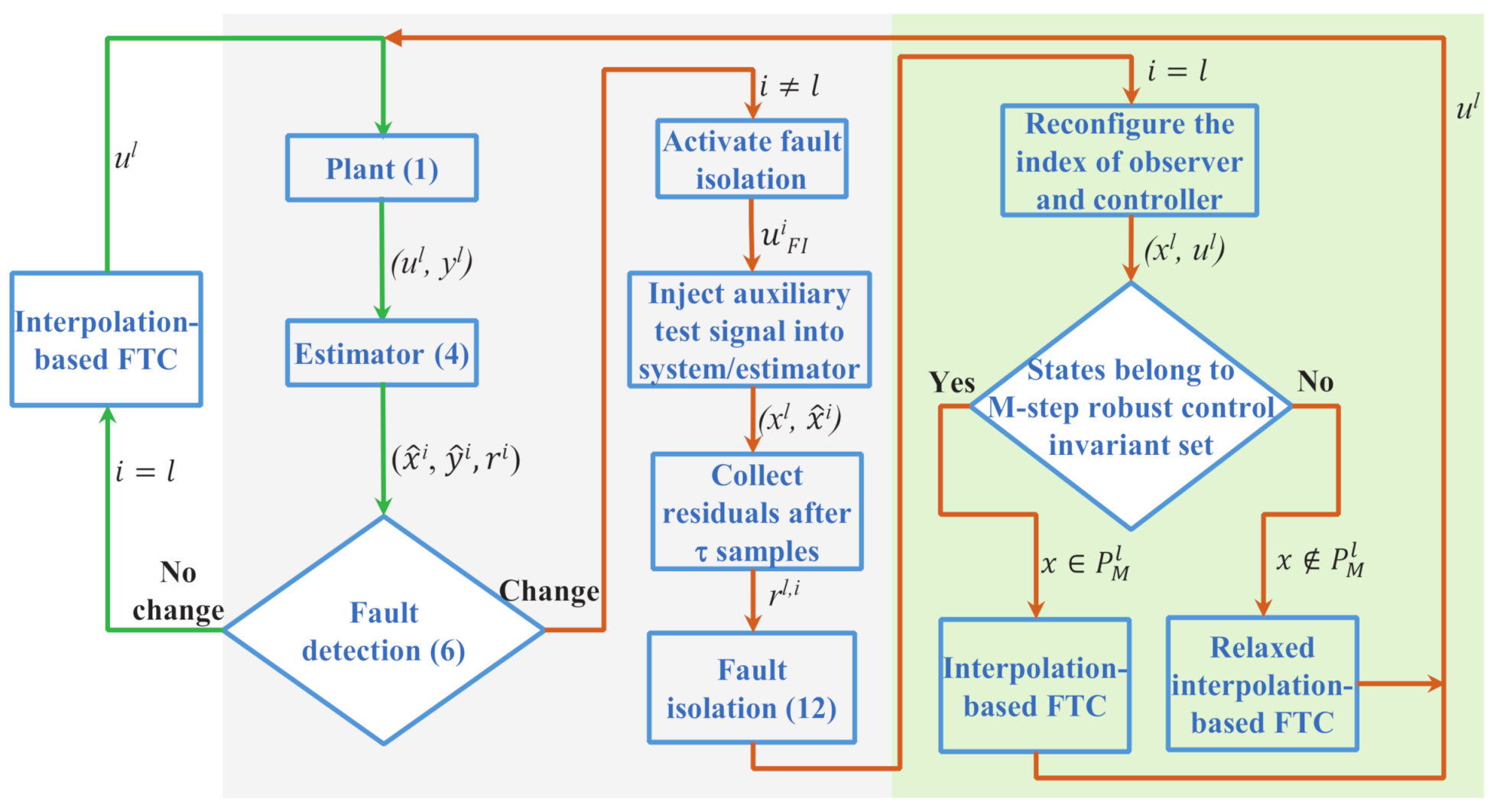
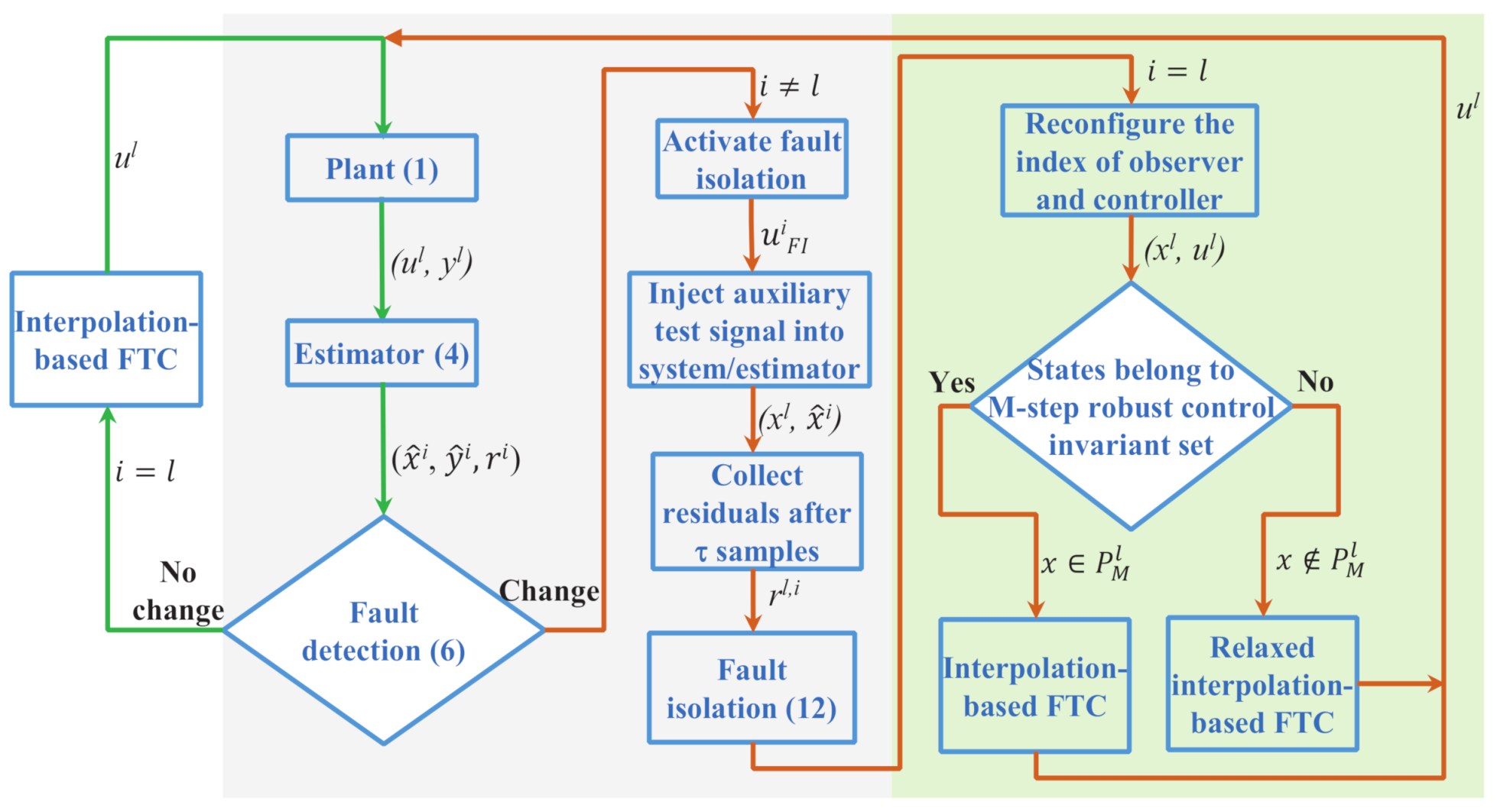
3.1. The Overall Scheme of the Proposed AFD-Based Interpolation AFTC Method
3.2. AFD: Fault/Mode Change Detection and Isolation
3.3. Integrated Design of Observer and Unconstrained Controller
3.4. Constrained AFTC: Reconfigured Interpolating Control
3.5. The AFD-Based Reconfigured Interpolation FTC Algorithm
| Algorithm 1 AFD-based interpolation AFTC. |
|
4. Algorithm Verification by a Wastewater Treatment Plant Model
4.1. System Model and Parameters
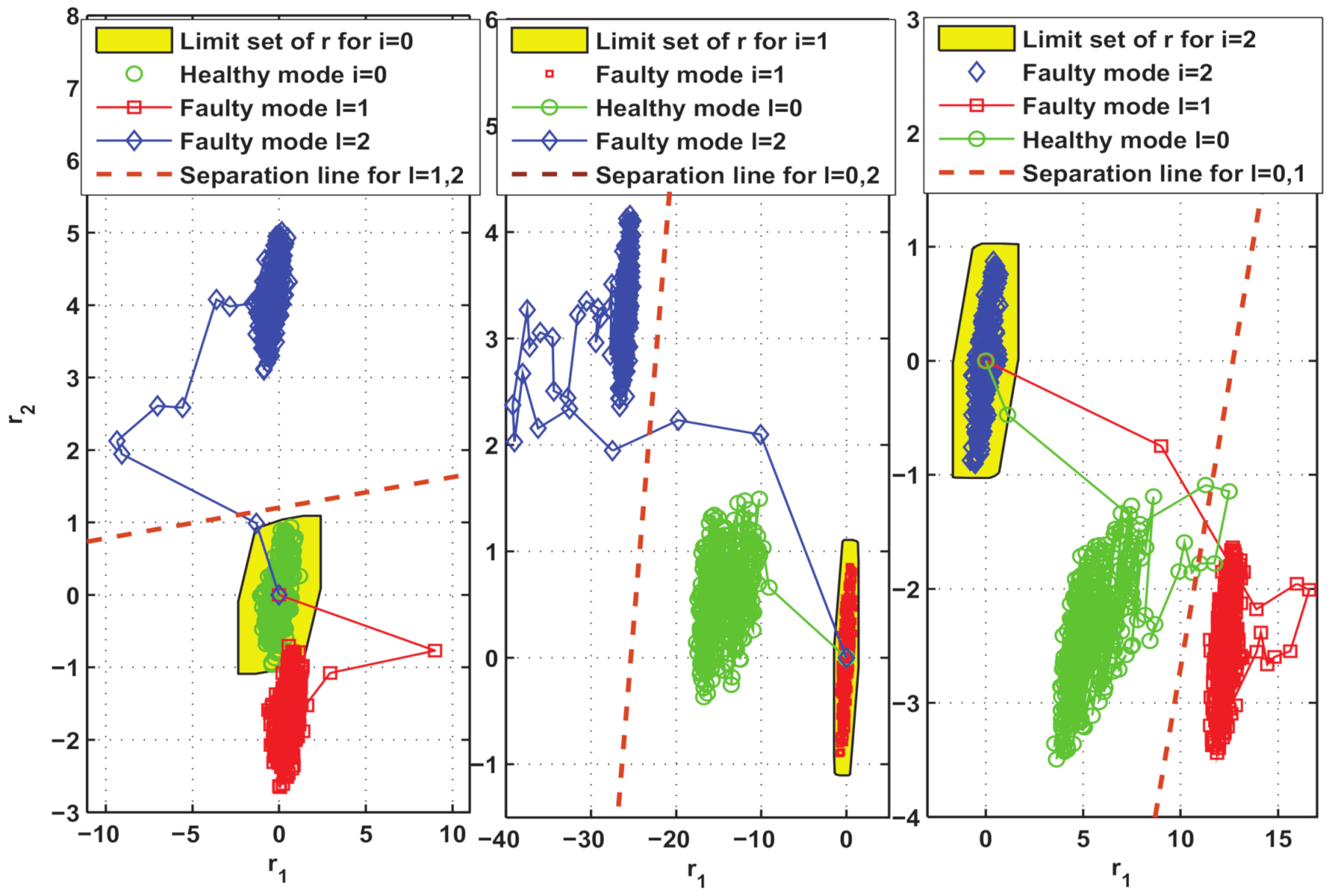
4.2. Offline Design of AFD and AFTC According to Algorithm 1 and Relevant Validation
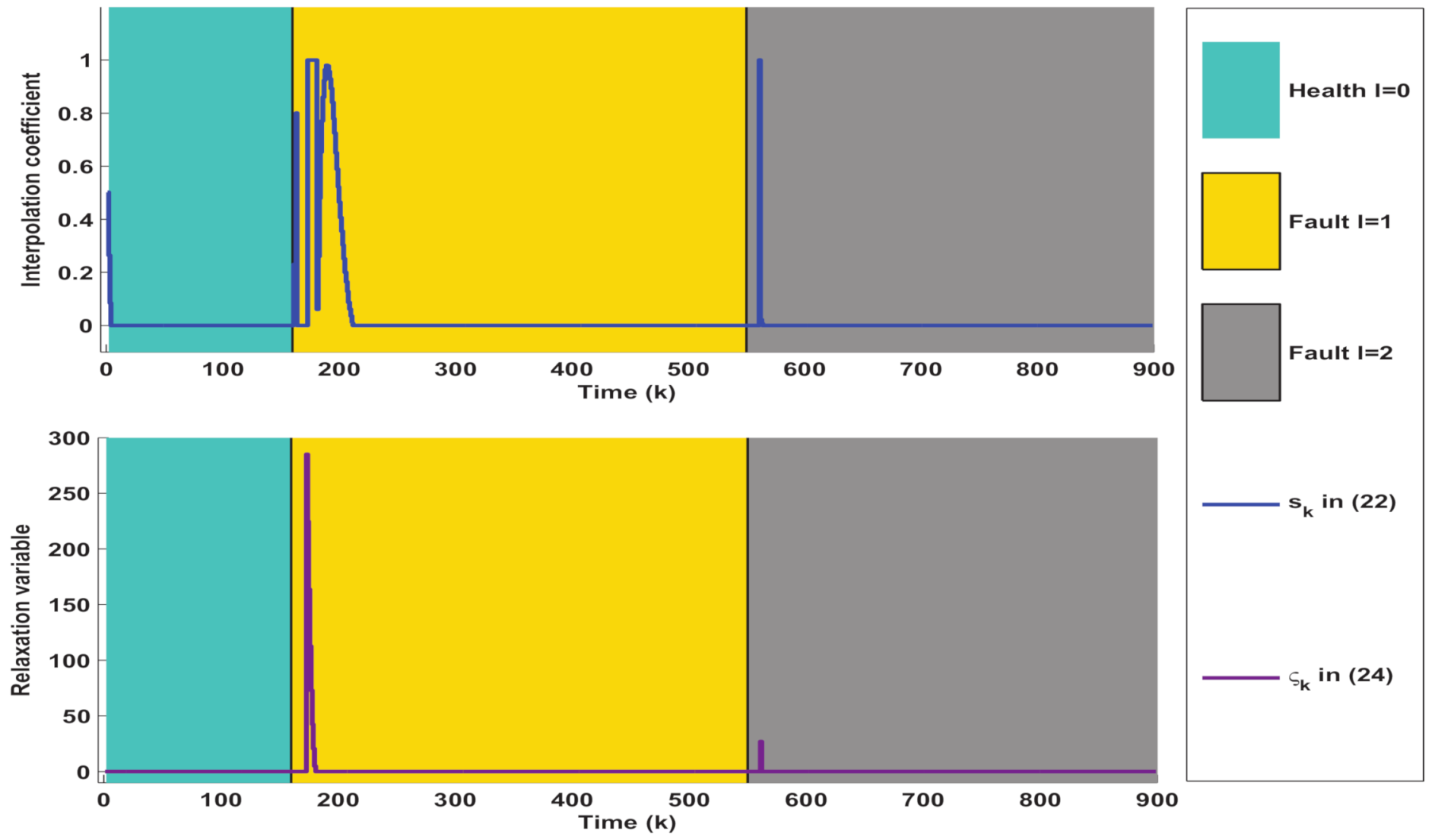
4.3. Simulation Results and Analysis of the above Designed AFD-Based AFTC Method
4.4. Multi-Performance Comparison and Discussion of Active Fault-Tolerant Control Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Ding, S. Model-Based Fault Diagnosis Techniques: Design Schemes, Algorithms, and Tools, 2nd ed.; Springer: London, UK, 2013. [Google Scholar]
- Zhu, C.; Li, C.; Chen, X.; Zhang, K.; Xin, X.; Wei, H. Event-triggered adaptive fault tolerant control for a class of uncertain nonlinear systems. Entropy 2020, 22, 598. [Google Scholar] [CrossRef] [PubMed]
- Blanke, M.; Kinnaert, M.; Lunze, J.; Staroswiecki, M. Diagnosis and Fault-Tolerant Control; Springer: Berlin, Germany, 2006. [Google Scholar]
- Gao, Z.; Cecati, C.; Ding, S. A survey of fault diagnosis and fault tolerant techniques-Part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef] [Green Version]
- Yin, S.; Xiao, B.; Ding, S.; Zhou, D. A review on recent development of spacecraft attitude fault tolerant control system. IEEE Trans. Ind. Electron. 2016, 63, 3311–3320. [Google Scholar] [CrossRef]
- Jiang, J.; Yu, X. Fault-tolerant control systems: A comparative study between active and passive approaches. Annu. Rev. Control 2012, 36, 60–72. [Google Scholar] [CrossRef]
- Arslan, A.; Khalid, M. A review of fault tolerant control systems: Advancements and applications. Measurement 2019, 143, 58–68. [Google Scholar]
- Habibi, H.; Rahimi, N.; Howard, I. Backstepping nussbaum gain dynamic surface control for a class of input and state constrained systems with actuator faults. Inf. Sci. 2019, 482, 27–46. [Google Scholar] [CrossRef]
- Zare, I.; Aghaei, S.; Puig, V. A supervisory active fault tolerant control framework for constrained linear systems. In Proceedings of the 2020 European Control Conference (ECC), St. Petersburg, Russia, 12–15 May 2020; pp. 2027–2032. [Google Scholar]
- Ferranti, L.; Wan, Y.; Keviczky, T. Fault-tolerant reference generation for model predictive control with active diagnosis of elevator jamming faults. Int. J. Robust Nonlinear Control 2019, 29, 5412–5428. [Google Scholar] [CrossRef]
- Shen, Q.; Yue, C.; Goh, C.; Wang, D. Active fault-tolerant control system design for spacecraft attitude maneuvers with actuator saturation and faults. IEEE Trans. Ind. Electron. 2019, 66, 3763–3772. [Google Scholar] [CrossRef]
- Yang, X.; Maciejowski, J.M. Fault-tolerant model predictive control of a wind turbine benchmark. IFAC Proc. Vol. 2012, 45, 337–342. [Google Scholar] [CrossRef] [Green Version]
- Khan, O.; Mustafa, G.; Khan, A.; Abid, M.; Ali, M. Fault-tolerant robust model predictive control of uncertain time-delay systems subject to disturbances. IEEE Trans. Ind. Electron. 2020. [Google Scholar] [CrossRef]
- Sheikhbahaei, R.; Alasty, A.; Vossoughi, G. Robust fault tolerant explicit model predictive control. Automatica 2018, 97, 248–253. [Google Scholar] [CrossRef]
- Yetendje, A.; Seron, M.; De Dona, J. Robust multiactuator fault-tolerant MPC design for constrained systems. Int. J. Robust Nonlinear Control 2013, 23, 1828–1845. [Google Scholar] [CrossRef]
- Franze, G.; Francesco, T.; Domenico, F. Actuator fault tolerant control: A receding horizon set-theoretic approach. IEEE Trans. Autom. Control 2014, 60, 2225–2230. [Google Scholar] [CrossRef]
- Lucia, W.; Domenico, F.; Franze, G. A set-theoretic reconfiguration feedback control scheme against simultaneous stuck actuators. IEEE Trans. Autom. Control 2017, 63, 2558–2565. [Google Scholar] [CrossRef]
- Famularo, D.; Franze, G.; Lucia, W.; Manna, C. A reconfiguration control framework for constrained systems with sensor stuck faults. Int. J. Robust Nonlinear Control 2019, 29, 1150–1164. [Google Scholar] [CrossRef]
- Witczak, M.; Buciakowski, M.; Aubrun, C. Predictive actuator fault tolerant control under ellipsoidal bounding. Int. J. Adapt. Control Signal Process. 2016, 30, 375–392. [Google Scholar] [CrossRef]
- Han, K.; Feng, J.; Zhao, Q. Robust estimator-based dual-mode predictive fault tolerant control for constrained linear parameter varying systems. IEEE Trans. Ind. Inf. 2021, 17, 4469–4479. [Google Scholar] [CrossRef]
- Lunze, J.; Richter, J. Reconfigurable fault-tolerant control: A tutorial introduction. Eur. J. Control 2008, 14, 359–386. [Google Scholar] [CrossRef]
- Heirung, T.; Mesbah, A. Input design for active fault diagnosis. Ann. Rev. Control 2019, 47, 35–50. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, J.; Qu, B.; Wu, H.; Zhou, J. Unified architecture of active fault detection and partial active fault-tolerant control for incipient faults. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1688–1700. [Google Scholar] [CrossRef]
- Raimondo, D.; Marseglia, G.; Braatz, R.; Scott, J. Fault-tolerant model predictive control with active fault isolation. In Proceedings of the 2013 Conference on Control and Fault-Tolerant Systems (SysTol), Nice, France, 9–11 October 2013; pp. 444–449. [Google Scholar]
- Puncochar, I.; Siroky, J.; Simandl, M. Constrained active fault detection and control. IEEE Trans. Autom. Control 2015, 60, 253–258. [Google Scholar] [CrossRef]
- Boem, F.; Gallo, A.; Raimondo, D.; Parisini, T. Distributed fault-tolerant control of large-scale systems: An active fault diagnosis approach. IEEE Trans. Control Netw. Syst. 2019, 7, 288–301. [Google Scholar] [CrossRef] [Green Version]
- Blanchini, F.; Casagrande, D.; Giordano, G.; Miani, S.; Olaru, S.; Reppa, V. Active fault isolation: A duality-based approach via convex programming. SIAM J. Control Optim. 2017, 55, 1619–1640. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, H. Constrained Control of Uncertain, Time-Varying, Discrete-Time Systems; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Nguyen, H.; Gutman, P.; Olaru, S.; Hovd, D. Implicit improved vertex control for uncertain, time-varying linear discrete-time systems with state and control constraints. Automatica 2013, 49, 2754–2759. [Google Scholar] [CrossRef]
- Rubin, D.; Mercader, P.; Gutman, P.; Nguyen, H.; Bemporad, A. Interpolation based predictive control by ellipsoidal invariant sets. IFAC J. Syst. Control 2020, 12, 100084. [Google Scholar] [CrossRef]
- Blanchini, F.; Miani, S. Set-Theoretic Methods in Control; Birkhauser: Boston, MA, USA, 2008. [Google Scholar]
- Lan, J.; Patton, R. A new strategy for integration of fault estimation within fault-tolerant control. Automatica 2016, 69, 48–59. [Google Scholar] [CrossRef]
- Zeilinger, M.; Morari, M.; Jones, C. Soft constrained model predictive control with robust stability guarantees. IEEE Trans. Autom. Control 2014, 59, 1190–1202. [Google Scholar] [CrossRef] [Green Version]
- Knudsen, B.; Brusevold, J.; Foss, B. An exact penalty-function approach to proactive fault-tolerant economic MPC. In Proceedings of the 2016 European Control Conference (ECC), Aalborg, Denmark, 29 June–1 July 2016; pp. 758–763. [Google Scholar]
- Francisco, M.; Skogestad, S.; Vega, P. Model predictive control for the self-optimized operation in wastewater treatment plants: Analysis of dynamic issues. Comput. Chem. Eng. 2015, 82, 259–272. [Google Scholar] [CrossRef] [Green Version]
- El, H.; Vega, P.; Tadeo, F.; Francisco, M. A constrained closed loop MPC based on positive invariance concept for a wastewater treatment plant. Int. J. Syst. Sci. 2018, 49, 1–15. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Algorithm 1 | [20] | [13] | [16] | |
|---|---|---|---|---|---|
| Performance | |||||
| Types of faults that can be handled | Component/actuator faults | Actuator fault | Actuator fault | Actuator fault | |
| Can active fault diagnosis be realized | Yes | - | - | - | |
| Number of observers used in real time | 1 | - | - | 3 | |
| Design principle of fault tolerant control | -based IC | Dual-mode MPC | LMI-based MPC | -based MPC | |
| Expression of fault tolerant feasible domain | Polyhedral set | Polyhedral set | Ellipsoidal set | Ellipsoidal set | |
| Optimization problems to be solved | LP | QP | SDP | QP | |
| Can active constraint relaxation be achieved | Yes | - | - | - | |
| Extensibility of FTC method | General | General | High | General | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, K.; Chen, C.; Chen, M.; Wang, Z. Constrained Active Fault Tolerant Control Based on Active Fault Diagnosis and Interpolation Optimization. Entropy 2021, 23, 924. https://doi.org/10.3390/e23080924
Han K, Chen C, Chen M, Wang Z. Constrained Active Fault Tolerant Control Based on Active Fault Diagnosis and Interpolation Optimization. Entropy. 2021; 23(8):924. https://doi.org/10.3390/e23080924
Chicago/Turabian StyleHan, Kezhen, Changzhi Chen, Mengdi Chen, and Zipeng Wang. 2021. "Constrained Active Fault Tolerant Control Based on Active Fault Diagnosis and Interpolation Optimization" Entropy 23, no. 8: 924. https://doi.org/10.3390/e23080924
APA StyleHan, K., Chen, C., Chen, M., & Wang, Z. (2021). Constrained Active Fault Tolerant Control Based on Active Fault Diagnosis and Interpolation Optimization. Entropy, 23(8), 924. https://doi.org/10.3390/e23080924