
PD-Based Optimal ADRC with Improved Linear Extended State Observer



Abstract
:1. Introduction
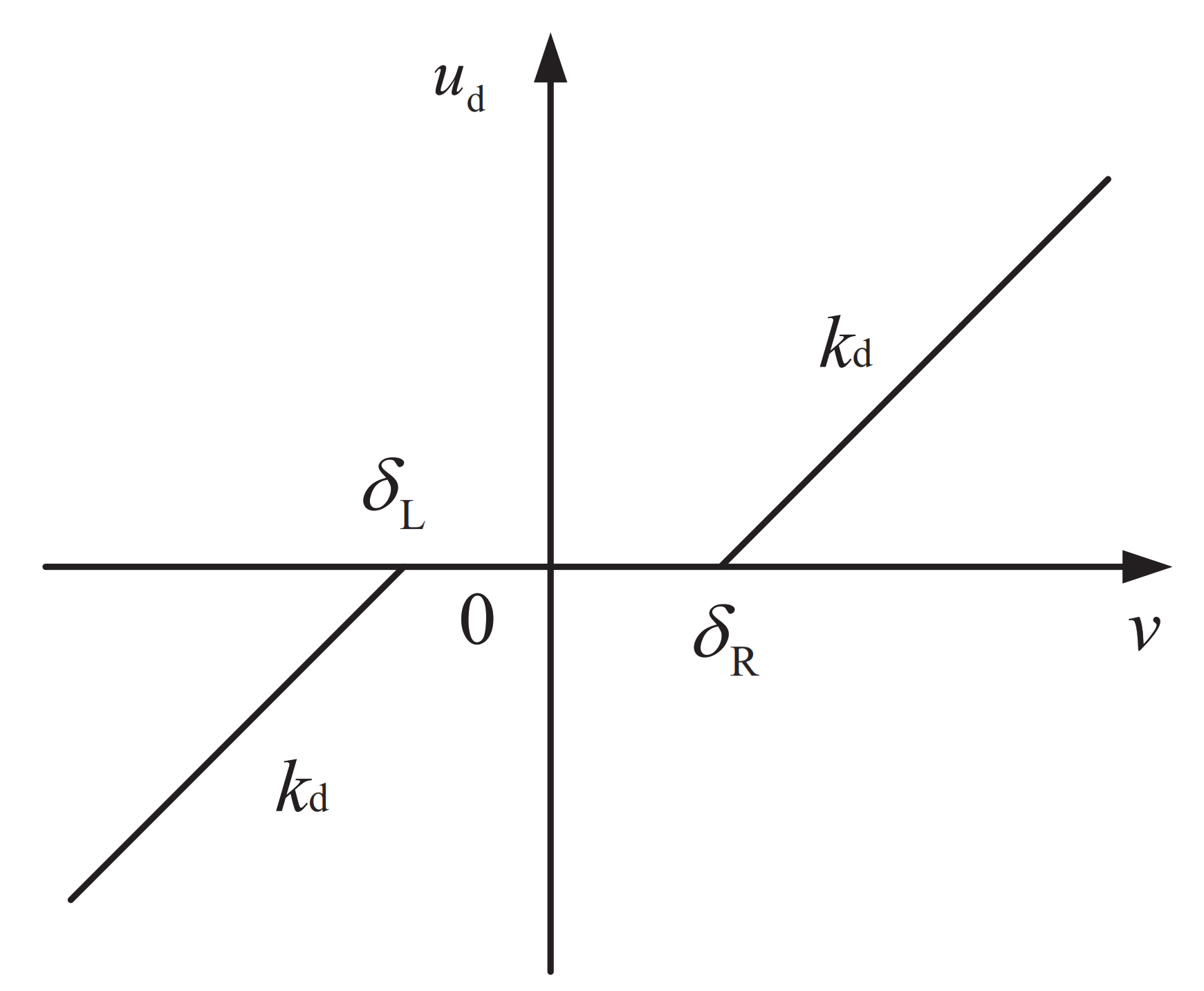
- Establishing a dead-zone compensated model. By introducing a compensation method [1], the influence of the dead-zone nonlinearity on the control system is eliminated.
- Introducing a PD as the control law. Compared with SEFCL, PD has the advantages of simple design, fewer parameters, and easy application.
- Designing an improved linear ESO with smaller gains. The proposed observer is established based on the estimated errors of all state variables, with the purpose of enhancing estimation performance for disturbances with smaller gains.
- Optimizing parameters by PSO with a designed objection function. The controller with the optimal parameters provides better dynamic and steady-state control performances.
2. The Model of a Controlled System
3. The Proposed PD-Based ADRC Optimal Control Method
3.1. Transition Process
3.2. PD Control Law
3.3. An Improved Linear ESO
3.4. Design of the PD-Based ADRC Optimal Controller
4. Experimental Results and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lewis, F.L.; Tim, W.K.; Wang, L.Z.; Li, Z.X. Deadzone compensation in motion control systems using adaptive fuzzy logic control. IEEE Trans. Control Syst. Technol. 1999, 7, 731–742. [Google Scholar] [CrossRef]
- She, J.H.; Fang, M.; Ohyama, Y.; Hashimoto, H.; Wu, M. Improving disturbance-rejection performance based on an equivalent-input-disturbance approach. IEEE Trans. Ind. Electron. 2008, 55, 380–389. [Google Scholar] [CrossRef]
- Wang, S.; Yousefpour, A.; Yusuf, A.; Jahanshahi, H.; Munoz-Pacheco, J.M. Synchronization of a non-equilibrium four-dimensional chaotic system using a disturbance-observer-based adaptive terminal sliding mode control method. Entropy 2020, 22, 271. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, Y.N.; Cheng, W.; Gong, D.W.; Zhang, Y.; Zhang, Z.; Xue, G. Adaptively robust rotary speed control of an anchor-hole driller under varied surrounding rock environments. Control Eng. Pract. 2019, 86, 24–36. [Google Scholar] [CrossRef]
- Zhang, J.; Guo, L. Theory and design of PID controller for nonlinear uncertain systems. IEEE Control Syst. Lett. 2019, 3, 643–648. [Google Scholar] [CrossRef]
- Samad, T. A survey on industry impact and challenges thereof. IEEE Control Syst. Mag. 2017, 37, 17–18. [Google Scholar]
- Hang, C.C.; Åström, K.J.; Ho, W.K. Refinements of the Ziegler-Nichols tuning formula. IEE Proc. D Control Theory Appl. 1991, 138, 111–118. [Google Scholar] [CrossRef]
- O’Dwyer, A. PI and PID controller tuning rules: An overview and personal perspective. In Proceedings of the Irish Signals and Systems Conference, Dublin, Ireland, 28–30 June 2006; pp. 161–166. [Google Scholar]
- Han, J.Q. From PID technique to active disturbances rejection control technique. Control Eng. China 2003, 9, 13–18. [Google Scholar]
- Han, J.Q. Active disturbance rejection controller and its applications. Control Decis. 1998, 13, 19–23. [Google Scholar]
- Chen, S.; Bai, W.Y.; Hu, Y.; Huang, Y.; Gao, Z. On the conceptualization of total disturbance and its profound implications. Sci. China Inform. Sci. 2020, 63, 221–223. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.N.; Zhang, Z.; Gong, D.W.; Lu, X.; Zhang, Y.; Cheng, W. Optimal active-disturbance-rejection control for propulsion of anchor-hole drillers. Sci. China Inform. Sci. 2021, 64, 1–3. [Google Scholar] [CrossRef]
- Xue, W.C.; Huang, Y. Performance analysis of 2-DOF tracking control for a class of nonlinear uncertain systems with discontinuous disturbances. Int. J. Robust Nonlinear Control 2018, 28, 1456–1473. [Google Scholar] [CrossRef]
- Sira-Ramirez, H.; Linares-Flores, J.; Garcia-Rodriguez, C.; Contreras-Ordaz, M.A. On the control of the permanent magnet synchronous motor: An active disturbance rejection control approach. IEEE Trans. Control Syst. Technol. 2014, 22, 2056–2063. [Google Scholar] [CrossRef]
- Huang, Y.; Xue, W.C. Active disturbance rejection control: Methodology, theoretical analysis and applications. ISA Trans. 2014, 53, 6083–6090. [Google Scholar] [CrossRef]
- Aguilar-Ibañez, C.; Sira-Ramirez, H.; Acosta, J.Á. Stability of active disturbance rejection control for uncertain systems: A Lyapunov perspective. Int. J. Robust Nonlinear Control 2017, 27, 4541–4553. [Google Scholar] [CrossRef]
- Aguilar-Ibañez, C.; Sira-Ramirez, H.; Suarez-Castanon, M.S. A linear active disturbance rejection control for a ball and rigid triangle system. Math. Probl. Eng. 2016, 5, 1–11. [Google Scholar] [CrossRef]
- Aguilar-Ibañez, C.; Sira-Ramirez, H.; Acosta, J.Á; Suarez-Castanon, M.S. An algebraic version of the active disturbance rejection control for second-order flat systems. Int. J. Control 2021, 94, 215–222. [Google Scholar] [CrossRef]
- Han, J.Q. Active Disturbance Rcjection Control Technique—The Technique for Estimating and Compensating the Uncertaintics, 1st ed.; National Defense Industry Press: Beijing, China, 2008. [Google Scholar]
- Wang, Y.; Zhang, W.; Dong, H.; Yu, L. A LADRC based fuzzy PID approach to contour error control of networked motion control system with time-arying delays. Asian J. Control 2020, 22, 1973–1985. [Google Scholar] [CrossRef]
- Zhong, S.; Huang, Y.; Guo, L. A parameter formula connecting PID and ADRC. Sci. China Inform. Sci. 2020, 63, 1–3. [Google Scholar] [CrossRef]
- Wang, C.; Chen, Z.; Sun, Q. Design of PID and ADRC based quadrotor helicopter control system. In Proceedings of the Control & Decision Conference, Yinchuan, China, 28 May 2016; pp. 5860–5865. [Google Scholar]
- Liu, N.; Cao, S.; Fei, J. Fractional-order PID controller for active power filter using active disturbance rejection control. Math. Probl. Eng. 2019, 2019, 1–10. [Google Scholar] [CrossRef]
- Ren, H.; Hou, B.; Zhou, G.; Shen, L.; Li, Q. Variable pitch active disturbance rejection control of wind turbines based on BP neural network PID. IEEE Access. 2020, 8, 71781–71797. [Google Scholar] [CrossRef]
- Schn, J.C. Optimal Control of hydrogen Atom-Like systems as thermodynamic engines in finite time. Entropy 2020, 22, 1066. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. IEEE Int. Conf. Neural Netw. 1995, 4, 1942–1948. [Google Scholar]
- Song, X.F.; Zhang, Y.; Guo, Y.N.; Sun, X.Y.; Wang, Y.L. Variable-size cooperative coevolutionary particle swarm optimization for feature selection on high-dimensional data. IEEE Trans. Evol. Comput. 2020, 24, 882–895. [Google Scholar] [CrossRef]
- Guo, Y.N.; Zhang, X.; Gong, D.W.; Zhang, Z.; Yang, J.J. Novel interactive preference-based multi-objective evolutionary optimization for bolt supporting networks. IEEE Trans. Evol. Comput. 2020, 24, 750–764. [Google Scholar] [CrossRef]
- Sadeghpour, M.; Salarieh, H.; Vossoughi, G.; Alasty, A. Multi-variable control of chaos using PSO-based minimum entropy control. Commun. Nonlinear Sci. Num. Simul. 2011, 16, 2397–2404. [Google Scholar] [CrossRef]
- Aguilar, M.; Coury, D.V.; Reginatto, R.; Monaro, R.M. Multi-objective PSO applied to PI control of DFIG wind turbine under electrical fault conditions. Electr. Power Syst. Res. 2020, 180, 106081. [Google Scholar] [CrossRef]
- Vahidi-Moghaddam, A.; Rajaei, A.; Ayati, M.; Vatankhah, R.; Hairi-Yazdi, M.R. Adaptive prescribed-time disturbance observer using nonsingular terminal sliding mode control: Extended Kalman filter and particle swarm optimization. IET Control Theory Appl. 2020, 14, 3301–3311. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, B.; Liu, D. Fault tolerant tracking control for nonlinear systems with actuator failures through particle swarm optimization-based adaptive dynamic programming. Appl. Soft Comput. 2020, 97, 106766. [Google Scholar] [CrossRef]
- Ni, J.; Wu, Z.; Liu, L.; Cl, C. Fixed-time adaptive neural network control for nonstrict-feedback nonlinear systems with deadzone and output constraint. ISA Trans. 2019, 97, 458–473. [Google Scholar] [CrossRef]
- Zhang, M.H.; Jing, X.J. A bioinspired dynamics-based adaptive fuzzy SMC method for half-car active suspension systems with input dead zones and saturations. IEEE Trans. Cybernet. 2021, 51, 1743–1755. [Google Scholar] [CrossRef] [PubMed]
- Alagoz, B.B. Hurwitz stability analysis of fractional order LTI systems according to principal characteristic equations. ISA Trans. 2017, 70, 7–15. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Methods | MAAE | MEAE | SDAE | ITAE |
|---|---|---|---|---|
| TPD | 0.5379 | 0.0740 | 0.1004 | 1.4800 |
| TPID | 0.5072 | 0.0568 | 0.0879 | 1.1354 |
| TPID-TP | 0.2369 | 0.0271 | 0.0361 | 0.5427 |
| LADRC-LESO | 0.1804 | 0.0692 | 0.0499 | 1.3842 |
| NADRC-LESO | 0.1679 | 0.0641 | 0.0489 | 1.2816 |
| LADRC-ILESO | 0.0246 | 0.0088 | 0.0067 | 0.1768 |
| NADRC-ILESO | 0.0303 | 0.0131 | 0.0083 | 0.2615 |
| PD-LESO-TP | 5.3777 | 2.5274 | 1.6213 | 50.5480 |
| PD-ILESO-TP | 1.0193 | 0.4437 | 0.2779 | 8.8744 |
| PROPOSED | 0.0094 | 0.0034 | 0.0026 | 0.0672 |
| Control Methods | MAACI | MEACI | SDACI | ITACI |
|---|---|---|---|---|
| TPD | 5.3067 | 0.0776 | 0.1012 | 1.5522 |
| TPID | 5.3075 | 0.0706 | 0.0969 | 1.4118 |
| TPID-TP | 0.2031 | 0.0571 | 0.0490 | 1.1415 |
| LADRC-LESO | 0.1469 | 0.0566 | 0.0478 | 1.1309 |
| NADRC-LESO | 0.3619 | 0.0947 | 0.0619 | 1.8946 |
| LADRC-ILESO | 0.1568 | 0.0565 | 0.0478 | 1.1290 |
| NADRC-ILESO | 0.3836 | 0.0985 | 0.0733 | 1.9699 |
| PD-LESO-TP | 0.1596 | 0.0610 | 0.0492 | 1.2193 |
| PD-ILESO-TP | 0.1384 | 0.0574 | 0.0472 | 1.1474 |
| PROPOSED | 0.1462 | 0.0564 | 0.0478 | 1.1282 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Cheng, J.; Guo, Y. PD-Based Optimal ADRC with Improved Linear Extended State Observer. Entropy 2021, 23, 888. https://doi.org/10.3390/e23070888
Zhang Z, Cheng J, Guo Y. PD-Based Optimal ADRC with Improved Linear Extended State Observer. Entropy. 2021; 23(7):888. https://doi.org/10.3390/e23070888
Chicago/Turabian StyleZhang, Zhen, Jian Cheng, and Yinan Guo. 2021. "PD-Based Optimal ADRC with Improved Linear Extended State Observer" Entropy 23, no. 7: 888. https://doi.org/10.3390/e23070888
APA StyleZhang, Z., Cheng, J., & Guo, Y. (2021). PD-Based Optimal ADRC with Improved Linear Extended State Observer. Entropy, 23(7), 888. https://doi.org/10.3390/e23070888