
Psychomotor Predictive Processing

VTT Technical Research Centre of Finland, FI-02150 Espoo, Finland
Entropy 2021, 23(7), 806; https://doi.org/10.3390/e23070806
Submission received: 27 May 2021
/
Revised: 22 June 2021
/
Accepted: 23 June 2021
/
Published: 24 June 2021
(This article belongs to the Section Entropy and Biology)
Abstract
:Psychomotor experience can be based on what people predict they will experience, rather than on sensory inputs. It has been argued that disconnects between human experience and sensory inputs can be addressed better through further development of predictive processing theory. In this paper, the scope of predictive processing theory is extended through three developments. First, by going beyond previous studies that have encompassed embodied cognition but have not addressed some fundamental aspects of psychomotor functioning. Second, by proposing a scientific basis for explaining predictive processing that spans objective neuroscience and subjective experience. Third, by providing an explanation of predictive processing that can be incorporated into the planning and operation of systems involving robots and other new technologies. This is necessary because such systems are becoming increasingly common and move us farther away from the hunter-gatherer lifestyles within which our psychomotor functioning evolved. For example, beliefs that workplace robots are threatening can generate anxiety, while wearing hardware, such as augmented reality headsets and exoskeletons, can impede the natural functioning of psychomotor systems. The primary contribution of the paper is the introduction of a new formulation of hierarchical predictive processing that is focused on psychomotor functioning.
1. Introduction
Within predictive processing, perception is a Bayesian process that involves updating prior beliefs into posterior beliefs in order to reduce prediction errors, in other words, to reduce differences between what we expect to experience and what we do experience. Empirical research by others has provided support for predictive processing. For example, interactions between predictions, expectations, sensory inputs, and attention have been found in research using functional magnetic resonance imaging [1]. Other empirical studies deploying neuroimaging have observed neurology for prediction errors [2], while separate empirical research using magneto-encephalography has found interactions between predictions and prediction errors [3]. In addition, empirical research by others using magneto-encephalography has examined disruptions to hierarchical predictive processing caused by sleep [4].
Prediction errors can be minimized by changing our expectations and/or changing our actions, including changing what we pay attention to and/or changing what we do. Notably, changes to reduce prediction errors may not improve wellbeing. For example, chronic ill health can be influenced more by changes to expectations and attention than by sensory evidence [5,6]. Apropos, findings from empirical research by others indicate that pain experience can be predicted in Bayesian terms [7]. Furthermore, findings from empirical research by others have indicated that symptoms can reflect the relative predominance of either prior beliefs or sensory inputs with predictive processing being influenced by personal characteristics [8].
In this paper, predictive processing was addressed from the point-of-view of planning and operating systems involving humans interacting with robots and wearing technologies such as augmented reality headsets and exoskeletons. This is necessary because such systems are becoming increasingly common and move us farther away from the hunter-gatherer lifestyles within which our psychomotor functioning evolved [9]. For example, beliefs that workplace robots are threatening can generate anxiety and fear, while the use of hardware, such as augmented reality headsets and wearable exoskeletons, can impede the natural functioning of psychomotor systems [10].
In particular, the purpose of this paper was to expand the scope of predictive processing theory in three ways. First, by going beyond previous studies that have encompassed embodied cognition but have not addressed some fundamental aspects of psychomotor functioning. Second, by proposing a scientific basis for explaining predictive processing that spans objective neuroscience and subjective experience. Third, by providing an explanation of predictive processing that can be incorporated into the planning and operation of systems involving robots and other new technologies. Throughout the remainder of this paper, such systems are referred to as human–robot systems.
To fulfil this purpose, the paper proceeds in seven further sections. In Section 2, the need to incorporate psychomotor predictive processing in the planning and operation of human–robot systems is explained. In Section 3, it is explained why the critical realist philosophy of science provides a better basis for framing psychomotor predictive processing than either the positivist or anti-positivist philosophies of science. In Section 4, it is explained that predictive global neuronal workspace (PGNW) [11] is the theory that is most compatible with critical realist framing of psychomotor predictive processing. PGNW combines predictive processing with the global neuronal workspace explanation of consciousness, the support for which can be found in more than a decade of empirical research by others using, for example, electroencephalography [12]. In Section 5, a critical realist framing is described with two examples. In Section 6, a critical realist framing of PGNW is related to psychomotor experience. In Section 7, a new formulation of hierarchical predictive processing is proposed that is focused on psychomotor functioning. In addition, challenges and opportunities are discussed for including the consideration of hierarchical psychomotor predictive processing in the planning and operation of human–robot systems. In Section 8, principal contributions are stated and directions for further research are proposed. Overall, this paper concerns theory building, principally, by bringing together the critical realist philosophy of science and PGNW in a new formulation of hierarchical predictive processing that is focused on psychomotor functioning. Although this theory building does not include new primary data from experiments, extensive reference is made to empirical research by others. In addition, the limitations of previous research and the need for further research are discussed in Section 6 and Section 8, respectively.
2. Need for Predictive Processing Formulation Focused on Psychomotor Functioning
New technologies bring an increasing variety and frequency of novel sensations that are far from those that human psychomotor functioning evolved to deal with [9,13]. For example, exoskeletons are mechanical frameworks that humans can wear to increase their strength and endurance beyond our evolved psychomotor limits. However, the wearing of exoskeletons restricts the range of human motion, such as three-dimensional rotational movements that are typically involved in lifting. At the same time, the wearing of exoskeletons introduces multiple new and unpredictable loads to the musculoskeletal systems. Hence, the wearing of exoskeletons can have negative effects on fascia system functioning. The fascia system comprises bands and sheets of connective tissue beneath the skin. It attaches, stabilizes, encloses, and separates muscles. Importantly, the fascia system is our largest sensory organ for interoception, nociception, and proprioception. Hence, exoskeletons can involve immediately apparent novel sensations, for example, from lifting while wearing a mechanical framework. Then, over time, wearing exoskeletons could contribute to unpredictable novel sensations through negative unintended changes to interoception, nociception, and proprioception. Here, it is important to note that wearable exoskeletons can be used in conjunction with other new technologies that introduce further sources of novel sensations, such as augmented reality headsets and mobile robotics [10,14].
Moreover, although fabricating new technologies involves more extraction of finite natural resources from the lithosphere and more disruption to the biosphere [15], the deployment of robots, etc. is increasing in many sectors [16,17]. Yet, the anticipation of widespread full automation is now being revised to the planning and operation of human–robot systems in what has been described as Society 5.0 [18]. This term refers to the fifth stage of technology-enabled development since the beginning of the industrial revolution, in which the need for technologies to complement and enhance human capabilities is emphasized [19]. In particular, rather than aiming for full automation, it is recognized that the so-called human touch is important in many endeavors [20], including in production work [21] and in healthcare [22].
This technology-enabled movement toward so-called Society 5.0 encompasses the consideration of human beliefs, including ethics [23]. Human ethical behavior is often a psychomotor phenomenon within which most people will typically adhere to sociocultural ethical practice unless overloaded by stress [24,25], for example, from resource depletion and time pressure [26,27]. Accordingly, from an optimistic perspective, human–robot systems have the potential to facilitate ethical behavior if robots reduce human stress from workload and time pressure. On the other hand, the introduction of robots can cause human stress to increase. For example, as well as anxieties about robots taking jobs [28]; there are also anxieties about robots developing dangerous superintelligence; about robots harboring malicious intrinsic motivations and about robots enacting unfavorable intentions [29,30,31,32]. Notably, human anxiety about perceived threats can contribute to humans underestimating their proximity [33] and overestimating the pain that they could cause [34]. Moreover, psychological stress from anxiety can contribute to people becoming accident-prone [35].
Hence, human–robot systems need to be planned and operated to minimize the potential for increasing human stress. Here, it is important to note that different people have different propensities for experiences of anxiety and related pain [36,37,38]. Apropos, the planning and operation of human–robot systems need to take into account psychomotor differences in a wide variety of settings that could contribute to unintended consequences, including increased human stress, anxiety, and pain. This is of the utmost importance because short-term stress, anxiety, and pain can contribute to long-term disorders of consciousness, such as the experience of chronic symptoms without pathophysiological disruption. In other words, chronic ill health that is far more extensive than potential initial causes, i.e., chronic medically unexplained symptoms [5,6,39,40]. Accordingly, it is important to include consideration of predictive processing in the planning and operation of human–robot systems. In particular, hierarchical predictive processing provides a physics of life perspective for psychomotor experience, which encompasses novel sensory inputs being followed by the development of negative expectations, and then the avoidance of movement and other sources of sensory inputs that are expected to be negative [41,42].
The consideration of predictive processing should be carried out with methods that are consistent with the preference of science and practice for parsimony and simplicity [43,44,45,46,47]. Accordingly, methods should be informed by a scientific theory that provides a simple predictive framework for psychomotor experience. This should be a scientific theory that is focused upon the embodied action that is inherent in psychomotor functioning. Furthermore, it should be compatible with the parsimonious simple methods used in engineering design and operations management. Typically, this involves formats such as tables within methodologies that provide structured guidance for dealing with otherwise challenging issues. For example, design methodologies can include tables for function analyses, quality function deployment, and evaluating alternatives [48].
3. Critical Realist Philosophy of Science
There is debate about different levels and types of consciousness [49,50,51,52,53,54]. These can be analyzed in terms of, for example, physical-neurobiological, functional, informational-computational, representationalist, and phenomenological [55]. Underlying debate about levels and types of consciousness is the difficulty of bringing together opposing philosophies of science: positivism and anti-positivism, for example, positivist neuroscience data and anti-positivist interpretivist descriptions. Critical realism is a philosophy of science that bridges positivism and anti-positivism [56], and it is used in the framing of psychomotor experience because of its advantages compared to positivism and anti-positivism [57,58]. In particular, unlike positivism’s general laws in flat conjunctions of cause and effect, critical realism posits a three-layered stratification of causation encompassing the why, how, and what of experience. Furthermore, unlike anti-positivism within which it is claimed that explanations can provide only subjective impressions of unique human experiences, critical realism provides why-how-what explanations of causation that are generalizable within particular enabling contexts [59,60,61].
Critical realist context-dependent causation (i.e., why) involves generative causal mechanisms comprising tendencies and powers [62,63]. Tendencies are potentials that are typical to a category. For example, many people can be anxious occasionally but people within the neurotic personality type category possess the tendency to suffer anxiety more often [64]. Powers are potentials to do specific things but not others. For example, the human body has a wide, but not limitless, range of movement [65].
Critical realist reality is an open system where causation can be generalizable, but only within contexts that provide conditions for enabling causation. For example, psychomotor rehabilitation treatment can be carried out within different organizational structures, such as building arrangements, and personnel roles, and within different organizational cultures, such as dress code and communication style. However, if organizational structure and organizational culture for psychomotor rehabilitation are the same for all rehabilitation treatments, such as physiotherapy, then different psychomotor experiences from the same treatment are likely to arise from different generative causal mechanisms.
Notably, critical realism provides a generalizable causal framing for the same actions in the same context, such as the same environmental niche, leading to different experiences. This is different to positivistic laws of causation. It is also different to the anti-positive view that an action can lead to diverse outcomes that are too individually subjective to be generalized. However, unlike anti-positivism, the critical realist explanation is not antagonistic toward those starting from a positivistic perspective. This is because, in common with positivism, critical realism holds that it is possible to construct knowledge that, to some extent, represents or mirrors reality as it objectively exists. At the same time, unlike positivism, the critical realism explanation is not antagonistic toward those starting from an anti-positivistic perspective. This is because, in common with anti-positivism, critical realism holds that there are no universal mechanisms of causation in human endeavors. Hence, critical realism can bridge otherwise opposing perspectives [66].
4. Predictive Global Neuronal Workspace Theory (PGNW)
There are many theories of consciousness, each which has its own strengths and weaknesses [67]. However, the scientific theory of consciousness that is most relevant to psychomotor predictive processing is predictive global neuronal workspace theory (PGNW) [11,68,69].
PGNW has several advantages for including psychomotor generative characteristics in the planning of operation of human–robot systems. In particular, it is has the underlying simplicity of a widely applicable principle: the free-energy principle (FEP). This is a physics of life principle, which formalizes embodied cognition of the autopoietic organization of living things. The FEP formalizes that active systems must occupy a limited repertoire of internal states through minimizing the long-term average of unwanted surprise from external states: i.e., from the world [70,71].
For psychomotor experience, a further advantage is that the corollary of FEP applied within PGNW is active inference by which living things take action in order to survive. Specifically, in this physics of life process theory, living things, including humans, implement generative models in order to survive. This involves humans surviving by taking action to align their internal generative models with external states. Apropos, free energy in FEP can be regarded as the information a person is lacking to align her/his internal generative model with the external state [41]. Hence, if survival depends upon resolving information gaps between the internal generative model and the external state, then free energy in FEP can be regarded as the survival information deficit from which unsustainable unwanted surprise arises. Action to better align the internal generative model with the external state reduces unwanted surprise by reducing the survival information deficit (i.e., by reducing FEP free energy). Better aligning can involve updating the internal generative model based on current sensory sampling of the external state and current actions taken in the external state. Alternatively, updating the internal generative model can be based on the action of changing what sensations are sampled from the external state, and/or can be based on taking new action in the external state to change sensations from the external state. For example, changing sampling can involve becoming hypervigilant to a potential source of pain, and taking new action in the external state to restrict work involving the potential source of pain. Often, actions will be interrelated, and can be referred to as a policy, with new priorities for sensory sampling and/or new priorities for actions being a policy change. Overall, humans survive by reducing prediction errors amidst the complexity of the environmental niches in which they survive [72]. Active inference is relevant to psychomotor experience in many different practical settings [73].
Another distinction of PGNW is that it has a parsimonious structure, which is very suitable for tabular representations. Specifically, PGNW comprises three main constructs: the consistency of top-down prior expectations, strength of bottom-up sensory signals, and endogenous attention-based modulation. These are constructs that have been found to be important in separate empirical research by others, for example, in relation to the experience of pain. Research deploying neuroimaging has found that expectations shape individuals’ experiences of pain [74], and that attention affects which sensory events are selected [75]. Notably, as explained in more detail in subsequent sections with further references, findings from other empirical research also indicate that constructs in PGNW can be influenced by characteristics such as personality type [76,77].
Importantly, PGNW draws upon one of the most empirically well-supported models of consciousness: global neuronal workspace [12]. Another advantage is that within critical realism, causation is generative [62,63] and generative models are at the core of PGNW. Notably, through its predictive potential, PGNW has potential to contribute to addressing the psychomotor experience of symptoms without pathophysiological disruption [5,6]: for example, negative changes in psychomotor functioning that are much larger and more long-term than can be explained by a potential cause, such as a minor injury.
5. Critical Realist Framing of Psychomotor Experience
Embodied cognition involves mind–body behaviors that are not always brain-centric [78,79], and can be described as complex psychomotor interactions [80,81]. For example, our largest sensory organ for interoception, nociception, and proprioception is the highly innervated fascial system [82,83]. The fascia system can become densified around our physiological asymmetries, such as one leg being slightly shorter than the other, during repetitive movement patterns in modern lifestyles [84,85]. This can shape how we walk (i.e., our gait), which can affect what we remember [86] and influence our personalities [87]. This is an example of mind–body behaviors involving complex psychomotor interactions, rather than being wholly brain-based. Apropos, the same pain stimuli can be followed by different people experiencing different pain [88,89].
As summarized in Table 1, nonconscious combinations of personality type, hardiness level, fascia densification, and body memory can entail generative causal mechanisms for a low probability of conscious pain experience or high probability of conscious pain experience. This critical realist generative perspective of pain causation is consistent with pain matrix theory [90,91].
With regard to tendencies, personality type can affect pain experience. For example, higher neuroticism and lower openness are associated with persistent pain [92]. Alongside personality type, hardiness is an attribute that allows some individuals to stay healthier under stress than others [93,94]. Information for the definition of tendencies (what) can be obtained through other established techniques such as personality type tests and hardiness measure scales [95]. Information for the definition of current experience (what) can be obtained through other established techniques such as self-reporting pain scales, physical examination, and imaging studies.
With regard to powers, the highly innervated fascial system comprises tissues that connect bones with muscles to enable dynamic functioning [96,97]. However, dynamic functioning depends upon fascia being able to move fully and smoothly. Densification can restrict fascial functioning by restricting sliding between fascial tissue interfaces. Densification can result from over-repetition of a narrow range of movements [98]. Importantly, expectations about future pain can be based on body memory of past pain [99,100,101]. Information for the definition of powers can be obtained through established techniques such as physiological function tests [102] and pain memory questionnaires [103].
As summarized in Table 1, a nonconscious generative causal mechanism for a low probability of pain experience would be, for example, a person not being prone to pain anxiety, having a high hardiness, having one minor fascia densification, and body memory of one fast pain recovery. For such a person, one surprise pain from movement during a routine narrow range of movements can be experienced due to one minor densification in the fascial system. Such densification could be reversed through one physical therapy involving fascia manipulation and small rehabilitation exercise to restore full smooth fascia functioning [104,105]. This could be followed by a reduced likelihood of further pain as the range of movement is increased through movement practice and the perception is improved through reduced densification of the fascia system [106].
By contrast, a generative causal mechanism for a high probability of pain experience would be, for example, a person being prone to pain anxiety, having low hardiness, having widespread fascia densification, and having body memory of many persistent pain experiences. Consider, for example, a prescribed rehabilitation exercise for such a person. Rehabilitation exercise can be followed by slightly increased pain initially [107]. However, this can have the unintended negative consequence of reducing the range of movement as the person tries to avoid pain. This rehabilitation exercise outcome can precipitate learned helplessness and descend into chronic pain conditions with widespread complex psychomotor symptoms [108,109,110,111,112]. The potential for such negative unintended consequences may be increased through stress caused by interacting with robotics and the wearing of hardware such as augmented reality headsets and exoskeletons [10,14]. Accordingly, it is appropriate to include consideration of generative causal mechanisms, as illustrated in Table 1, during the planning and operation of human–robot systems.
6. Relating PGNW to Critical Realist Framing of Psychomotor Experience
6.1. Overview
As summarized in Table 2, PGNW can be related to an expanded version of the examples above. Apropos, a human production operative who works with mobile robotics while wearing hardware, such as exoskeletons and headsets, may develop a consistent top-down prior expectation of ankle pain from what was initially a surprise ankle pain early in a working day. This could have arisen from wearing an exoskeleton having introduced unpredictable loads to the production operative’s musculoskeletal system while restricting three-dimensional rotational movements that are typically involved in lifting. Toward the end of the day, there may be very strong bottom-up sensory signals because the operative has to do some heavy lifting. If the operative pays attention to the ankle, then it is likely that the operative will be conscious of ankle pain. However, as the end of the working day nears, the operative’s attention to ankle pain can be modulated by attention being focused on leaving work on time so as to be able to keep a social appointment. As a consequence, the operative may not be conscious of ankle pain at the final stages of the day despite there being several hours of consistent prior evidence to support ankle pain expectation and despite strong physical causation for increased ankle pain during heavy lifting [113,114]. Whether conscious or nonconscious of ankle pain at the end of the working day, the operative may subsequently undergo some minor ankle fascia manipulation therapy and begin one ankle rehabilitation exercise to widen the range of ankle movement. After a few days, the ankle may be pain-free and the operative may soon forget about having had ankle pain.
However, the wearing of exoskeletons could have negative effects on fascia system functioning, such as negative unintended changes to interoception, nociception, and proprioception [9]. Apropos, the next day, the operative’s anxiety about ankle injury could lead the operative to becoming hypervigilant to any bottom-up sensory signal related to the ankle. This can involve two attentional processes of hypervigilance: detection of threatening stimuli and difficulty in disengaging attention from threatening stimuli. In particular, operatives with high pain-related anxiety are more likely to orient their attention toward a pain-related threat and have difficulty in disengaging from the threat [115]. Treatment may not end hypervigilance. Rather, treatment can be followed by fear of re-injury and prevent the return to work [116]. At worst, they can descend into chronic fear of pain from movement (i.e., kinesiophobia) and chronic pain conditions with widespread complex symptoms, such as fibromyalgia [117]. Thus, formulation of the prior expectation of acute ankle-specific pain during one working day can expand into a consistent prior expectation of chronic body-wide pain. Here, it is important to note chronic body-wide pain is prevalent amongst many populations throughout the world [118].
6.2. Consistency of Top-Down Prior Expectations
During the evolution of our psychomotor systems, humans were hunter-gatherers who could develop consistent prior expectations as they moved on foot through natural environments in order to survive [119]. The change from hunter-gathering to agricultural settlement began the transition away from natural lifestyles [120] and toward a disconnect between psychomotor movement and human survival. This has brought a fundamental change in prior expectations. In particular, hunter-gathers have the prior expectation that survival depends upon moving with the wide repertoire of full-body motions involved in hunting and gathering. By contrast, the majority of humans in 2021 are not involved in the daily psychomotor motions involved in hunting and gathering. Rather, the majority of humans can have the consistent prior expectation that survival will not depend upon undertaking a wide repertoire of daily full-body motions [121]. There is evidence that humans become conscious of the pain that they are expecting to experience [89]. Yet, having expectations of pain from movement alongside no expectation of having to move in order to survive is a fundamentally different combination of expectations compared to when the human psychomotor system evolved. This disconnect between movement and survival can be addressed through psychomotor rehabilitation to increase movement. However, the compositions of prior expectations related to psychomotor pain are very difficult to define and to address [122,123], not least because of the lack of understanding of how body memory functions [124,125]. Meanwhile, the world’s remaining hunter-gatherers continue to have better health than much of the rest of humanity [126].
6.3. Strength of Bottom-Up Sensory Signals
If there is a strong pain signal from a strong blow, there can be a close match between the point of contact and location of short-term pain. By contrast, in phenomena such as complex regional pain syndrome (CRPS), there can be widespread pain disproportionate in severity and time to the original source of pain. This can involve extreme pain, swelling, reduced motion range, changes to skin, and changes to bones. CRPS can start in one limb but spread throughout the body [127]. CRPS pain is an example of diffuse pain, which is not fully understood by medical science [128]. In addition to phenomena within which pain signals are not connected to an initial pain source and pain signals being diffuse, pain signals can also be unpredictable [129].
Yet, even a very strong bottom-up psychomotor signal does not necessarily lead to pain. For example, in the zone of a psychomotor flow state [130,131], a boxer may not be conscious of pain from punches. This is epitomized by the words of the famously successful boxer, who went 91 bouts undefeated between 1943 and 1951, Sugar Ray Robinson: “You don’t think. It is all instinct. If you stop to think, you’re gone” [132]. Hence, he was in the zone of flow states long before sports psychology formalized them in scientific research and coaching practice [133]. More generally, repeated strong sensory signals, for example, in contact sports, can contribute to the same pain stimuli involving lower pain [134]. Thus, pain signals are different to audio signals and visual signals, which have been previously addressed in PGNW research, that are directly related to sources, that are specific, that are predictable, and that are not overridden by flow states [68,135].
6.4. Endogenous Attention-Based Modulation
With regard to attention and awareness, within PGNW, the more likely a top-down prior expectation is to predict a bottom-up sensory signal (i.e., the higher the prior probability), the more attention will be paid to the prior expectation and the more influence the prior expectation will have on what is experienced. By contrast, the lower the prior probability, the more attention will be paid to the bottom-up sensory signal and any prediction error between prior expectation and what is actually experienced. Thus, the predictive in predictive global neuronal workspace (PGNW) draws upon active inference: a corollary of the free-energy principle (FEP) according to which a self-organizing system will maintain itself by staying within a narrow range of states consistent with its survival. This involves all self-organizing systems, including humans, needing to minimize unwanted surprise from prediction errors [67]. However, the modern disconnect between psychomotor movement and survival leads to disconnects between minimizing unwanted surprise and survival. For example, as discussed above, fear of pain surprise can contribute to persistent extreme attention to pain and minimizing movement to avoid pain, thus acting against the survival imperative for psychomotor movement [136,137].
Within PGNW, conscious awareness should be continuous with an inferential hierarchy involving nonconscious processing. This entails the stability of conscious representations by superordinate representations being synchronized with subordinate representations. For example, conscious superordinate representation of a tool box is synchronized with subordinate representations of the surfaces, edges, and colors of the tool box. In turn, a superordinate model of a tool box can be embedded into scenes, such as a work site, in order to generate predictions about the ways that the tool box will be moved by a fork lift truck. Synchronous subordinate representation is needed to prevent loss of precision in representation of the tool box as it is moved [138]. However, unlike hierarchical PGNW models, psychomotor experience does not necessarily arise from temporally synchronous hierarchies. For example, the fascia system comprises complex matrices with indeterminate shifting boundaries rather than a stable hierarchy [139]. Moreover, psychomotor pain arises through complex interactions between, for example, personality type, hardiness levels, fascia, and body memory, which do not take place in synchronized hierarchies [140]. For example, psychomotor action can take place during nocturnal scratching of dermatitis while sleeping [141].
6.5. Expectations, Signals, Attention, and Human–Robot Systems
Human interactions with robots involve top-down prior expectations, the strength of bottom-up sensory signals, and endogenous attention-based modulation. Depending upon the human’s nonconscious generative mechanism, the influence of human–robot interaction can be more likely to have a positive effect on human psychomotor experience or be more likely to have a negative effect on human psychomotor experience. For example, design engineers and computer scientists who develop human–robot systems need to take into account that human top-down expectations can be negative. Moreover, negative expectations can contribute to negative human perception of bottom-up signals and negative human endogenous attention-based modulation, which, in turn, can contribute to negative consequences for psychomotor predictive processing. Furthermore, those who operate and manage human–robot systems need to take into account that stress and anxiety from human–robot interactions have the potential to contribute to long-term disorders of consciousness, for example, the experience of chronic symptoms without pathophysiological disruption [5,6,39,40]. Here, it is important to note that once individuals get “stuck” in chronic symptoms, it can take very long-term interventions to get “unstuck” [41]. Accordingly, the planning and the operation need to take into account different human nonconscious generative mechanisms (critical realist-why) and how these can provide the underlying basis for many activity-specific human generative models (PGNW-how) related to a wide variety of human interactions with robots, and with hardware such as augmented reality headsets and wearable exoskeletons.
7. Psychomotor Hierarchical Predictive Processing
7.1. Overview
The introduction of critical realist framing for nonconscious generative causation provides a unifying explanatory basis for activity-specific generative models that are focused on reducing prediction errors related to particular activities. For example, a human worker may have particular generative models for getting ready to travel to work, for travelling to work, for doing work, and so on. By contrast, as summarized in Table 1, critical realist generative causal mechanisms are not focused directly on prediction error reduction in particular individual activities. Rather, they can underlie all of a person’s activity-specific generative models. Accordingly, as summarized in Figure 1, they can be considered meta-generative models that are consistent with theoretical constructs such as self-models [79,142,143] and hierarchical predictive processing [41,42,144]. These are meta-generative models of individuals’ own psychomotor lives in the world as the world is experienced by those individuals. In other words, they are subjective autopoietic meta-generative models of world/self. Such meta-generative models can provide an explanatory basis for practitioners, such as design engineers and computer scientists, about why some people can suffer the descent into chronic ill health without pathophysiological disruption. For example, as summarized in Figure 1b, consistently strong top-down prior expectations of pain, which override bottom-up sensory inputs, can come from a generative causal mechanism/meta-generative model comprising a combination of personality type prone to pain anxiety, low hardiness, widespread major fascia densification, and adverse body memories. Accordingly, design engineers and computer scientists should develop human–robot systems to minimize the potential for increasing human stress. In particular, human–robot systems should be developed to maintain balance between the meta-generative model and sensory inputs shown in Figure 1a.
7.2. Challenges
Even with a critical realist framing, there are challenges for the application of modeling methods used in previous PGNW studies during the planning and operation of human–robot systems. For example, methodologies for defining personality type, hardiness levels, fascia densification, and body memory can contribute to approximate descriptions with indeterminate boundaries, such as those between one personality type category and another [145]. Moreover, fascia research is at an early stage [146]. Hence, it is as yet unclear exactly how fascia densification affects interoception, nociception, proprioception, and exteroception. In addition, relationships between body memory and fascia are topics of scientific research that are at a very early stage. Accordingly, the influence of fascia densification and body memory on bottom-up sensory signals is uncertain. With regard to attention-based modulation, the fascia system comprises complex matrices, rather than a stable hierarchy, within which the operation of body memory is uncertain. Nonetheless, critical realist PGNW already has potential for incorporation into the planning and operation of human–robot systems.
7.3. Opportunities in Planning Human–Robot Systems
With regard to planning, as shown by Table 2 and Figure 2, critical realist PGNW has the characteristic of good scientific theories and of engineering design methods: parsimony [147]. In particular, critical realist PGNW is parsimonious in its definition of main constructs and interactions between them. For example, a main proposition is that consciousness is most likely to occur when there is alignment between consistent top-down prior expectations, strong bottom-up sensory signals, and endogenous attention-based modulation. As summarized in Table 2, this fundamental proposition is applicable to the critical realist framing of psychomotor experience and is a useful starting point for setting-out nuances, divergences, and their consequences.
For example, within psychomotor experience, as explained above, there is no need for pain signals to be strong in order for there to be strong pain. Rather, hypervigilance to the fear of pain can contribute to descent into debilitating diffuse body-wide pain. Conversely, strong pain signals do not necessarily lead to strong pain. Rather, there are situations where people pay little, if any, attention to strong pain signals, for example, when in the zone of flow states. Moreover, the modern disconnect between psychomotor movement and survival subverts assumptions that minimizing unwanted surprise will facilitate survival. On the contrary, as explained above, minimizing unwanted pain surprise through avoiding movement can contribute to chronic widespread pain and many serious health problems. Accordingly, tabular summaries of critical realist PGNW can be used to highlight these issues in conjunction with established engineering design methods such as failure mode and effects analysis (FMEA) and job design. FMEA provides a systematic process for predicting and preventing problems [148], while job design methods are used to facilitate both workplace performance and worker wellbeing [149].
Here, it is important to note that human participation in human–robot systems is not limited to those who operate the systems. Rather, they can involve human end-users who may already be facing psychomotor challenges, such as elderly residents in care homes that deploy robotics to assist human carers. Thus, critical realist PGNW could be included in service design [150] that takes into account the psychomotor characteristics of human-robot systems’ end-users such as care home residents.
7.4. Opportunities in Operating Human–Robot Systems
With regard to the operation of human–robot systems, critical realist PGNW can be useful in neuroscience education for successful psychomotor experiences and for addressing poor psychomotor experiences [151]. This can include using critical realist PGNW as a basis for calibrating expectations [152] by relating possible actions to different nonconscious generative causal mechanisms, for example, as summarized in Table 1 and Table 2. This can better enable explanations to be accepted, for example, by reconciling personal goals with personal characteristics [153]. This can minimize what has been described as the expectation–actuality discrepancy (i.e., prediction error) and thus increase the likelihood of satisfaction [154] through the definition of attainable states [41]. In particular, the definition of attainable states [41] can reduce negative consequences from expectations being set either too high or too low [155].
For explanation by humans, no major additions to the current best practice are required for critical realist PGNW to support neuroscience education for practitioners. The design of critical realist PGNW information and its communication should be based on the best practice [156,157,158] to enable accessibility to the individual and all those who can support the individual in progressing, for example, toward psychomotor pain reduction [153,154]. For explanation by artificial intelligence (AI), critical realist PGNW descriptions are well-suited to the current third phase in the development of AI. Specifically, a third phase that aims to combine the knowledge-guided top-down basis of its first phase with the data-driven bottom-up basis of its second phase [159,160]. This hybrid AI is not monolithic but is open to top-down rules-based software from different vendors and data-driven bottom-up software from other vendors. For example, critical realist PGNW constructs and interactions between them could be maintained in top-down standardized templates in one software, and details of individuals’ characteristics could be bottom-up inputs from many other software packages. Importantly for human accessibility, it may be possible for both top-down rules and bottom-up inputs to be human-readable [161]. This can be important to both operatives and end-users in human–robot systems.
8. Conclusions
The purpose of this paper is to expand the scope of predictive processing in three ways. First, by going beyond previous predictive processing studies that have encompassed embodied cognition but have not addressed fundamental aspects of psychomotor functioning [162]. As summarized in Table 1, this has been carried out by providing preliminary analyses of interrelationships between personality type, hardiness levels, fascia system, and body memory. Second, the scope of predictive processing has been expanded by proposing a scientific basis for explaining predictive processing that spans objective neuroscience and subjective experience. This has been carried out by explaining how critical realism addresses the comparative limitations of positivism and anti-positivism, while providing a bridge between them. Furthermore, as summarized in Table 1, it has been explained that critical realism is inherently aligned with predictive processing through its emphasis on the generative nature of causation. Third, the scope of predictive processing has been expanded by providing an explanation of predictive processing that can be incorporated into the planning and operation of systems involving robots and other new technologies. This has been carried out through the practical analysis summarized in Table 2, Figure 1 and Figure 2, which are typical of the tabular formats and simple diagrams that are widely used in engineering design [48].
As summarized in Figure 1, the primary contribution of the paper was the introduction of a new formulation of hierarchical predictive processing, which is focused on psychomotor functioning. This formulation is not in competition with extant theoretical formulations, which have also been based on reviews of previous empirical research and encompass hierarchical predictive processing [41,79,163,164]. Rather, it is complementary to extant theoretical formulations encompassing hierarchical predictive processing, but which are not focused on psychomotor experience. Furthermore, the primary contribution of this paper is relevant to various theoretical formulations concerned with embodied, embedded, enacted, and extended cognition (4E) [165], which involve, but have not addressed, fundamental aspects of psychomotor functioning that are included in this paper. 4E cognition assumes that cognition is shaped by dynamic interactions between the brain, body physical environment, and social environment. Yet, previously, 4E studies in the literature have not encompassed interactions between personality type, hardiness levels, fascia system, and body memory, nor have they provided a structuring of the why, how, and what of psychomotor experience that can inform the planning and operation of human–robot systems. This is important because 4E cognition faces new challenges from interacting with robotics and wearing new technologies such as augmented reality headsets and exoskeletons.
A further important contribution was the outline of challenges for the application of modeling methods used in previous PGNW studies. In Table 3, a summary is provided of directions for further research to advance the understanding of psychomotor predictive processing, and its consideration in the planning and operation of human–robot systems.
Meanwhile, there are already many potential future directions for applying critical realist PGNW. These include furthering predictive processing research into skilful psychomotor performance in general [166] and specific phenomena in skilful psychomotor performance such as kinaesthetic motor imagery [167]. Such research can inform efforts to design and maintain systems that facilitate the balance between top-down expectations and bottom-up sensory inputs, as summarized in Figure 1a. With regard to Figure 1b, future research could also include addressing the psychomotor experience of symptoms without pathophysiological disruption and the psychomotor experience of relief after the administration of placebo treatments [6]. Such research could include how human nonconscious and conscious beliefs about robots and other technologies affect workplace performance and personal health. Furthermore, relating predictions framed in terms of critical realist PGNW to subsequent rich descriptions of what has been experienced [168] can provide wider and deeper insights that can be informative for all scientists and practitioners with interest in predictive processing.
Funding
This research was funded by EC grant number 952091.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The author thanks Laura Convertino and Karl Friston for discussion of the psychomotor meta-generative model in relation to the extant literature.
Conflicts of Interest
The author declares no conflict of interest.
References
- Kok, P.; Rahnev, D.; Jehee, J.F.; Lau, H.C.; De Lange, F.P. Attention reverses the effect of prediction in silencing sensory signals. Cereb. Cortex 2012, 22, 2197–2206. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wacongne, C.; Labyt, E.; van Wassenhove, V.; Bekinschtein, T.; Naccache, L.; Dehaene, S. Evidence for a hierarchy of predictions and prediction errors in human cortex. Proc. Natl. Acad. Sci. USA 2011, 108, 20754–20759. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Diaconescu, A.O.; Mathys, C.; Weber, L.A.E.; Kasper, L.; Mauer, J.; Stephan, K.E. Hierarchical prediction errors in midbrain and septum during social learning. Soc. Cogn. Affect. Neurosci. 2017, 12, 618–634. [Google Scholar] [CrossRef]
- Strauss, M.; Sitt, J.D.; King, J.R.; Elbaz, M.; Azizi, L.; Buiatti, M.; Naccache, L.; Van Wassenhove, V.; Dehaene, S. Disruption of hierarchical predictive coding during sleep. Proc. Natl. Acad. Sci. USA 2015, 112, E1353–E1362. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Edwards, M.J.; Adams, R.A.; Brown, H.; Parees, I.; Friston, K.J. A Bayesian account of “hysteria”. Brain 2012, 135, 3495–3512. [Google Scholar] [CrossRef] [PubMed]
- Ongaro, G.; Kaptchuk, T.J. Symptom perception, placebo effects, and the Bayesian brain. Pain 2019, 160, 1–4. [Google Scholar] [CrossRef]
- Anchisi, D.; Zanon, M.A. Bayesian perspective on sensory and cognitive integration in pain perception and placebo analgesia. PLoS ONE 2015, 10, e0117270. [Google Scholar] [CrossRef]
- Bräscher, A.K.; Sütterlin, S.; Scheuren, R.; Van den Bergh, O.; Witthöft, M. Somatic symptom perception from a predictive processing perspective: An empirical test using the thermal grill illusion. Psychosom. Med. 2020, 82, 708–714. [Google Scholar] [CrossRef]
- Cregan-Reid, V. Primate Change: How the World We Made Is Remaking Us; Cassell: London, UK, 2018. [Google Scholar]
- Fox, S.; Kotelba, A.; Marstio, I.; Montonen, J. Aligning human psychomotor characteristics with robots, exoskeletons and augmented reality. Robot. Comput.-Integr. Manuf. 2020, 63, 101922. [Google Scholar] [CrossRef]
- Whyte, C.J. Integrating the global neuronal workspace into the framework of predictive processing: Towards a working hypothesis. Conscious. Cogn. 2019, 73, 102763. [Google Scholar] [CrossRef]
- Mashour, G.A.; Roelfsema, P.; Changeux, J.P.; Dehaene, S. Conscious processing and the global neuronal workspace hypothesis. Neuron 2020, 105, 776–798. [Google Scholar] [CrossRef]
- Fox, S. Multiscale free energy analysis of human ecosystem engineering. Entropy 2021, 23, 396. [Google Scholar] [CrossRef]
- Fox, S.; Aranko, O.; Heilala, J.; Vahala, P. Exoskeletons: Comprehensive, comparative and critical analyses of their potential to improve manufacturing performance. J. Manuf. Technol. Manag. 2020, 31, 1261–1280. [Google Scholar] [CrossRef] [Green Version]
- Zalasiewicz, J.; Williams, M.; Waters, C.; Barnosky, A.; Palmesino, J.; Rönnskog, A.-S.; Edgeworth, M.; Neal, C.; Cearreta, A.; Ellis, E.; et al. Scale and diversity of the physical technosphere: A geological perspective. Anthr. Rev. 2017, 4, 9–22. [Google Scholar] [CrossRef]
- Evjemo, L.D.; Gjerstad, T.; Grøtli, E.I.; Sziebig, G. Trends in Smart Manufacturing: Role of Humans and Industrial Robots in Smart Factories. Curr. Robot. Rep. 2020, 1, 35–41. [Google Scholar] [CrossRef] [Green Version]
- Reis, J.; Melão, N.; Salvadorinho, J.; Soares, B.; Rosete, A. Service robots in the hospitality industry: The case of Hennna hotel, Japan. Technol. Soc. 2020, 63, 101423. [Google Scholar] [CrossRef]
- Fukuyama, M. Society 5.0: Aiming for a new human-centered society. Jpn. Spotlight 2018, 27, 47–50. [Google Scholar]
- Gauttier, S. Hospital 5.0: Enhancing nurses with the use of wearables. In Proceedings of the 32nd International BCS Human Computer Interaction Conference, Belfast, UK, 4–6 July 2018; pp. 1–5. [Google Scholar]
- Østergaard, E.H. Welcome to Industry 5.0, the human Touch Revolution Is Now Underway. Qual. Mag. 2019. Available online: https://www.ee.co.za/article/welcome-to-industry-5-0-the-human-touch-revolution-is-now-under-way.html (accessed on 22 April 2021).
- John, K.K.; Adarsh, S.N.; Pattali, V. Workers to super workers: A brief discussion on important technologies for industry 5.0 manufacturing systems. In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2020; Volume 2311, p. 070025. [Google Scholar]
- Cocuzzo, B.; Wrench, A.; O’Malley, C. Balancing protection from COVID-19 and the need for human touch in nursing homes. J. Am. Geriatr. Soc. 2020. [Google Scholar] [CrossRef]
- Longo, F.; Padovano, A.; Umbrello, S. Value-oriented and ethical technology engineering in Industry 5.0: A human-centric perspective for the design of the Factory of the Future. Appl. Sci. 2020, 10, 4182. [Google Scholar] [CrossRef]
- Goekoop, R.; de Kleijn, R. How higher goals are constructed and collapse under stress: A hierarchical Bayesian control systems perspective. Neurosci. Biobehav. Rev. 2021, 123, 257–285. [Google Scholar] [CrossRef]
- Youssef, F.F.; Dookeeram, K.; Basdeo, V.; Francis, E.; Doman, M.; Mamed, D.; Maloo, S.; Degannes, J.; Dobo, L.; Ditshotlo, P. Stress alters personal moral decision making. Psychoneuroendocrinology 2012, 37, 491–498. [Google Scholar] [CrossRef]
- Gino, F.; Schweitzer, M.E.; Mead, N.L.; Ariely, D. Unable to resist temptation: How self-control depletion promotes unethical behavior. Organ. Behav. Hum. Decis. Process. 2011, 115, 191–203. [Google Scholar] [CrossRef]
- Lee, E.-J.; Yun, J.H. Moral incompetency under time constraint. J. Bus. Res. 2019, 99, 438–445. [Google Scholar] [CrossRef]
- Sahota, N.; Ashley, M. When robots replace human managers: Introducing the quantifiable workplace. IEEE Eng. Manag. Rev. 2019, 47, 21–23. [Google Scholar] [CrossRef]
- Barrat, J. Our Final Invention: Artificial Intelligence and the End of the Human Era; St. Martin’s Press: New York, NY, USA, 2013. [Google Scholar]
- Cave, S.; Coughlan, K.; Dihal, K. “Scary robots”: Examining public responses to AI. In Proceedings of the AIES 2019 AAAI/ACM Conference on AI, Ethics, and Society, Honolulu, HI, USA, 27–28 January 2019. [Google Scholar]
- Mathur, M.B.; Reichling, D.B. Navigating a social world with robot partners: A quantitative cartography of the Uncanny Valley. Cognition 2016, 146, 22–32. [Google Scholar] [CrossRef] [Green Version]
- Vanderelst, D.; Winfield, A. The dark side of ethical robots. In Proceedings of the 2018 AAAI/ACM Conference on AI, Ethics, and Society, New Orleans, LA, USA, 2–3 February 2018; pp. 317–322. [Google Scholar]
- Tabor, A.; Catley, M.J.; Gandevia, S.C.; Thacker, M.A.; Spence, C.; Moseley, G.L. The close proximity of threat: Altered distance perception in the anticipation of pain. Front. Psychol. 2015, 6, 626. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Reicherts, P.; Wiemer, J.; Gerdes, A.; Schulz, S.M.; Pauli, P.; Wieser, M.J. Anxious anticipation and pain: The influence of instructed vs. conditioned threat on pain. Soc. Cogn. Affect. Neurosci. 2017, 12, 544–554. [Google Scholar] [CrossRef] [Green Version]
- Day, A.J.; Brasher, K.; Bridger, R.S. Accident proneness revisited: The role of psychological stress and cognitive failure. Accid. Anal. Prev. 2012, 49, 532–535. [Google Scholar] [CrossRef]
- Keogh, E.; Ellery, D.; Hunt, C.; Hannent, I. Selective attentional bias for pain-related stimuli amongst pain fearful individuals. Pain 2001, 91, 91–100. [Google Scholar] [CrossRef]
- Naylor, B.; Boag, S.; Gustin, S.M. New evidence for a pain personality? A critical review of the last 120 years of pain and personality. Scand. J. Pain 2017, 17, 58–67. [Google Scholar] [CrossRef] [PubMed]
- Garcia-Larrea, L.; Bastuji, H. Pain and consciousness. Prog. Neuro-Psychopharmacol. Biol. Psychiatry 2018, 87, 193–199. [Google Scholar] [CrossRef] [PubMed]
- Goldstein, D.S.; Kopin, I.J. Homeostatic systems, biocybernetics, and autonomic neuroscience. Auton. Neurosci. 2017, 208, 15–28. [Google Scholar] [CrossRef] [PubMed]
- Zaman, J.; Vlaeyen, J.W.; Van Oudenhove, L.; Wiech, K.; Van Diest, I. Associative fear learning and perceptual discrimination: A perceptual pathway in the development of chronic pain. Neurosci. Biobehav. Rev. 2015, 51, 118–125. [Google Scholar] [CrossRef] [PubMed]
- Peters, A.; McEwen, B.S.; Friston, K. Uncertainty and stress: Why it causes diseases and how it is mastered by the brain. Prog. Neurobiol. 2017, 156, 164–188. [Google Scholar] [CrossRef]
- Sallin, K.; Lagercrantz, H.; Evers, K.; Engström, I.; Hjern, A.; Petrovic, P. Resignation syndrome: Catatonia? Culture-bound? Front. Behav. Neurosci. 2016, 10, 7. [Google Scholar] [CrossRef] [Green Version]
- Glynn, I. Elegance in Science: The Beauty of Simplicity; Oxford University Press: Oxford, UK, 2010. [Google Scholar]
- Einstein, A. On the Method of Theoretical Physics; The Herbert Spencer Lecture; Oxford University Press: Oxford, UK, 1933. [Google Scholar]
- Baker, A. Simplicity. In Stanford Encyclopedia of Philosophy; Stanford University: Stanford, CA, USA, 2010. [Google Scholar]
- Wacker, J.G. A definition of theory: Research guidelines for different theory-building research methods in operations management. J. Oper. Manag. 1998, 16, 361–385. [Google Scholar] [CrossRef]
- Whetten, D. What constitutes a theoretical contribution? Acad. Manag. Rev. 1989, 14, 490–495. [Google Scholar] [CrossRef] [Green Version]
- Cross, N. Engineering Design Methods: Strategies for Product Design; John Wiley & Sons: Hoboken, NJ, USA, 2021. [Google Scholar]
- Bayne, T.; Hohwy, J.; Owen, A.M. Are there levels of consciousness? Trends Cogn. Sci. 2016, 20, 405–413. [Google Scholar] [CrossRef] [Green Version]
- Searle, J. Consciousness. In The Oxford Companion to Philosophy; Honderich, T., Ed.; Oxford University Press: Oxford, UK, 2005. [Google Scholar]
- Block, N. On a confusion about a function of consciousness. In The Nature of Consciousness: Philosophical Debates; Block, N., Flanagan, O., Guzeldere, G., Eds.; MIT Press: Cambridge, MA, USA, 1998; pp. 375–415. [Google Scholar]
- Gennaro, R.J. The Consciousness Paradox: Consciousness, Concepts, and Higher-Order Thoughts; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Dennett, D. Consciousness Explained; Penguin: London, UK, 2004. [Google Scholar]
- Lycan, W. Consciousness and Experience; MIT Press: Cambridge, MA, USA, 1996; pp. 1–4. [Google Scholar]
- Metzinger, T. Being No One: The Self-Model Theory of Subjectivity, 2nd ed.; MIT Press: Cambridge, MA, USA, 2004. [Google Scholar]
- Bhaskar, R. A Realist Theory of Science; Verso: London, UK, 1975. [Google Scholar]
- North, J. Sport Coaching Research and Practice: Ontology, Interdisciplinarity and Critical Realism; Routledge: London, UK, 2017. [Google Scholar]
- Williams, L.; Rycroft-Malone, J.; Burton, C.R. Bringing critical realism to nursing practice: Roy Bhaskar’s contribution. Nurs. Philos. 2017, 18, e12130. [Google Scholar] [CrossRef]
- Bhaskar, R. The Possibility of Naturalism: A Philosophical Critique of Contemporary Human Sciences, 4th ed.; Routledge: London, UK, 2014. [Google Scholar]
- Healey, M.P.; Hodgkinson, G.P. Rethinking the philosophical and theoretical foundations of organizational neuroscience: A critical realist alternative. Hum. Relat. 2014, 67, 765–792. [Google Scholar] [CrossRef]
- Mingers, J. Systems Thinking, Critical Realism and Philosophy: A Confluence of Ideas; Routledge: Oxford, UK, 2014. [Google Scholar]
- Archer, M.S. Structure, Agency and the Internal Conversation; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Smith, M.L. Overcoming theory-practice inconsistencies: Critical realism and information systems research. Inf. Organ. 2006, 16, 191–211. [Google Scholar] [CrossRef]
- Gershuny, B.S.; Sher, K.J. The relation between personality and anxiety: Findings from a 3-year prospective study. J. Abnorm. Psychol. 1998, 107, 252. [Google Scholar] [CrossRef]
- Yeadon, M.R.; King, M.A.; Wilson, C. Modelling the maximum voluntary joint torque/angular velocity relationship in human movement. J. Biomech. 2006, 39, 476–482. [Google Scholar] [CrossRef] [Green Version]
- Robson, C. Real World Research, 2nd ed.; Blackwell: Malden, MA, USA, 2002. [Google Scholar]
- Van Gulick, R. Consciousness. In The Stanford Encyclopedia of Philosophy; Zalta, E.N., Ed.; Spring 2018 Edition; Stanford University: Stanford, CA, USA, 2018; Available online: https://plato.stanford.edu/archives/spr2018/entries/consciousness/ (accessed on 22 April 2021).
- Whyte, C.J.; Smith, R. The predictive global neuronal workspace: A formal active inference model of visual consciousness. Prog. Neurobiol. 2020, 199, 101918. [Google Scholar] [CrossRef]
- Jeczminska, K. Global workspace theory and sensorimotor theory unified by predictive processing. J. Conscious. Stud. 2017, 24, 79–105. [Google Scholar]
- Solms, M.; Friston, K. How and why consciousness arises: Some considerations from physics and physiology. J. Conscious. Stud. 2018, 25, 202–238. [Google Scholar]
- Solms, M. The hard problem of consciousness and the free energy principle. Front. Psychol. 2019, 9, 2714. [Google Scholar] [CrossRef]
- Ramstead, M.J.D.; Kirchhoff, M.D.; Friston, K.J. A tale of two densities: Active inference is enactive inference. Adapt. Behav. 2020, 28, 225–239. [Google Scholar] [CrossRef] [Green Version]
- Fox, S. Active inference: Applicability to different types of social organization explained through reference to industrial engineering and quality management. Entropy 2021, 23, 198. [Google Scholar] [CrossRef]
- Atlas, L.Y.; Wager, T.D. How expectations shape pain. Neurosci. Lett. 2012, 520, 140–148. [Google Scholar] [CrossRef]
- Legrain, V.; Van Damme, S.; Eccleston, C.; Davis, K.D.; Seminowicz, D.A.; Crombez, G. A neurocognitive model of attention to pain: Behavioral and neuroimaging evidence. Pain 2009, 144, 230–232. [Google Scholar] [CrossRef]
- Handley, I.M.; Fowler, S.L.; Rasinski, H.M.; Helfer, S.G.; Geers, A.L. Beliefs about expectations moderate the influence of expectations on pain perception. Int. J. Behav. Med. 2013, 20, 52–58. [Google Scholar] [CrossRef]
- Franklin, Z.C.; Holmes, P.S.; Smith, N.C.; Fowler, N.E. Personality type influences attentional bias in individuals with chronic back pain. PLoS ONE 2016, 11, e0147035. [Google Scholar] [CrossRef]
- Colombetti, G.; Zavala, E. Are emotional states based in the brain? A critique of affective brainocentrism from a physiological perspective. Biol. Philos. 2019, 34, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Seth, A.K.; Tsakiris, M. Being a beast machine: The somatic basis of selfhood. Trends Cogn. Sci. 2018, 22, 969–981. [Google Scholar] [CrossRef] [Green Version]
- Arnold, M.M.; Müller-Oerlinghausen, B.; Hemrich, N.; Bönsch, D. Effects of Psychoactive Massage in Outpatients with Depressive Disorders: A Randomized Controlled Mixed-Methods Study. Brain Sci. 2020, 10, 676. [Google Scholar] [CrossRef]
- Cioni, G.; Sgandurra, G. Normal psychomotor development. In Handbook of Clinical Neurology; Aminoff, M.J., Boller, F., Swaab, D.F., Eds.; Elsevier: Amsterdam, The Netherlands, 2013; Volume 111, pp. 3–15. [Google Scholar]
- Schleip, R. Fascia as an organ of communication. In Fascia: The Tensional Network of the Human Body; Schleip, R., Findley, T.W., Chaitow, L., Huijing, P.A., Eds.; Elsevier Ltd.: Beijing, China, 2013; pp. 77–79. [Google Scholar]
- Stecco, C.; Pirri, C.; Fede, C.; Fan, C.; Giordani, F.; Stecco, L.; Foti, C.; De Caro, R. Dermatome and fasciatome. Clin. Anat. 2019, 32, 896–902. [Google Scholar] [CrossRef] [PubMed]
- Kaufman, K.R.; Miller, L.S.; Sutherland, D.H. Gait asymmetry in patients with limb-length inequality. J. Pediatric Orthop. 1996, 16, 144–150. [Google Scholar] [CrossRef]
- Wallden, M.; Sisson, N. Modern disintegration and primal connectivity. J. Bodyw. Mov. Ther. 2019, 23, 359–365. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Michalak, J.; Rohde, K.; Troje, N.F. How we walk affects what we remember: Gait modifications through biofeedback change negative affective memory bias. J. Behav. Ther. Exp. Psychiatry 2015, 46, 121–125. [Google Scholar] [CrossRef]
- Sun, J.; Wu, P.; Shen, Y.; Yang, Z.; Li, H.; Liu, Y.; Zhu, T.; Li, L.; Zhang, K.; Chen, M. Relationship between personality and gait: Predicting personality with gait features. In Proceedings of the 2018 IEEE International Conference on Bioinformatics and Biomedicine (BIBM), Madrid, Spain, 3–6 December 2018; pp. 1227–1231. [Google Scholar]
- Amtmann, D.; Liljenquist, K.; Bamer, A.; Bocell, F.; Jensen, M.; Wilson, R.; Turk, D. Measuring pain catastrophizing and pain-related self-efficacy: Expert panels, focus groups, and cognitive interviews. Patient-Patient-Cent. Outcomes Res. 2018, 11, 107–117. [Google Scholar] [CrossRef]
- Tracey, I. Getting the pain you expect: Mechanisms of placebo, nocebo and reappraisal effects in humans. Nat. Med. 2010, 16, 1277. [Google Scholar] [CrossRef]
- Chapman, C.R. Neuromatrix theory. Pain Forum 1996, 5, 139–142. [Google Scholar] [CrossRef]
- Legrain, V.; Iannetti, G.D.; Plaghki, L.; Mouraux, A. The pain matrix reloaded: A salience detection system for the body. Prog. Neurobiol. 2011, 93, 111–124. [Google Scholar] [CrossRef] [Green Version]
- Sutin, A.R.; Stephan, Y.; Luchetti, M.; Terracciano, A. The prospective association between personality traits and persistent pain and opioid medication use. J. Psychosom. Res. 2019, 123, 109721. [Google Scholar] [CrossRef]
- Merino-Tejedor, E.; Hontangas-Beltrán, P.M.; Boada-Grau, J.; Lucas-Mangas, S. Hardiness as a moderator variable between the Big-Five Model and work effort. Personal. Individ. Differ. 2015, 85, 105–110. [Google Scholar] [CrossRef]
- Soderstrom, M.; Dolbier, C.; Leiferman, J.; Steinhardt, M. The relationship of hardiness, coping strategies, and perceived stress to symptoms of illness. J. Behav. Med. 2000, 23, 311–328. [Google Scholar] [CrossRef]
- Hystad, S.W.; Eid, J.; Johnsen, B.H.; Laberg, J.C.; Bartone, P.T. Psychometric properties of the revised Norwegian dispositional resilience (hardiness) scale. Scand. J. Psychol. 2010, 51, 237–245. [Google Scholar] [CrossRef]
- Levin, S.M.; Martin, D.C. Biotensegrity: The mechanics of fascia. Fascia—The Tensional Network of the Human Body. In The Science and Clinical Applications in Manual and Movement Therapy; Elsevier: Edinburgh, UK, 2012; pp. 137–142. [Google Scholar]
- Mense, S. Innervation of the thoracolumbar fascia. Eur. J. Transl. Myol. 2019, 29, 8297. [Google Scholar] [CrossRef]
- Pavan, P.G.; Stecco, A.; Stern, R.; Stecco, C. Painful connections: Densification versus fibrosis of fascia. Curr. Pain Headache Rep. 2014, 18, 441. [Google Scholar] [CrossRef]
- Burton, T. Painful memories: Chronic pain as a form of re-membering. Mem. Stud. 2011, 4, 23–32. [Google Scholar] [CrossRef]
- Gedney, J.J.; Logan, H. Pain related recall predicts future pain report. Pain 2006, 121, 69–76. [Google Scholar] [CrossRef]
- Riva, G. The neuroscience of body memory: From the self through the space to the others. Cortex 2018, 104, 241–260. [Google Scholar] [CrossRef]
- Kaukinen, P.T.; Arokoski, J.P.; Huber, E.O.; Luomajoki, H.A. Intertester and intratester reliability of a movement control test battery for patients with knee osteoarthritis and controls. J. Musculoskelet. Neuronal Interact. 2017, 17, 197. [Google Scholar]
- Schnurr, R.F.; MacDonald, M.R. Memory complaints in chronic pain. Clin. J. Pain 1995, 11, 103–111. [Google Scholar] [CrossRef]
- Chaitow, L. Fascial Dysfunction: Manual Therapy Approaches, 2nd ed.; Handspring Publishing Ltd.: East Lothian, UK, 2018. [Google Scholar]
- Stecco, C. Functional Atlas of the Human Fascial System; Elsevier Health Sciences: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Larkam, E. Fascia-focused Pilates for the older adult. Top. Geriatr. Rehabil. 2017, 33, 20–31. [Google Scholar] [CrossRef]
- Nelson, A.; Kokkonen, J. Stretching Anatomy; Human Kinetics: Champaign, IL, USA, 2013. [Google Scholar]
- Goodwin, H.; Eagleson, C.; Mathews, A.; Yiend, J.; Hirsch, C. Automaticity of attentional bias to threat in high and low worriers. Cogn. Ther. Res. 2017, 41, 479–488. [Google Scholar] [CrossRef] [Green Version]
- Liptan, G.L. Fascia: A missing link in our understanding of the pathology of fibromyalgia. J. Bodyw. Mov. Ther. 2010, 14, 3–12. [Google Scholar] [CrossRef]
- Salim, J.; Wadey, R.; Diss, C. Examining the relationship between hardiness and perceived stress-related growth in a sport injury context. Psychol. Sport Exerc. 2015, 19, 10–17. [Google Scholar] [CrossRef]
- Salomons, T.V.; Moayedi, M.; Weissman-Fogel, I.; Goldberg, M.B.; Freeman, B.V.; Tenenbaum, H.C.; Davis, K.D. Perceived helplessness is associated with individual differences in the central motor output system. Eur. J. Neurosci. 2012, 35, 1481–1487. [Google Scholar] [CrossRef] [PubMed]
- Samwel, H.J.; Evers, A.W.; Crul, B.J.; Kraaimaat, F.W. The role of helplessness, fear of pain, and passive pain-coping in chronic pain patients. Clin. J. Pain 2006, 22, 245–251. [Google Scholar] [CrossRef] [PubMed]
- Deroche, T.; Woodman, T.; Stephan, Y.; Brewer, B.W.; Le Scanff, C. Athletes’ inclination to play through pain: A coping perspective. Anxiety Stress Coping 2011, 24, 579–587. [Google Scholar] [CrossRef]
- Flood, A.; Waddington, G.; Thompson, K.; Cathcart, S. Increased conditioned pain modulation in athletes. J. Sports Sci. 2017, 35, 1066–1072. [Google Scholar] [CrossRef]
- Bardel, M.H.; Woodman, T.; Perreaut-Pierre, E.; Barizien, N. The role of athletes’ pain-related anxiety in pain-related attentional processes. Anxiety Stress Coping 2013, 26, 573–583. [Google Scholar] [CrossRef]
- Tripp, D.A.; Stanish, W.; Ebel-Lam, A.; Brewer, B.W.; Birchard, J. Fear of reinjury, negative affect, and catastrophizing predicting return to sport in recreational athletes with anterior cruciate ligament injuries at 1 year post-surgery. Rehabil. Psychol. 2007, 52, 74. [Google Scholar] [CrossRef]
- Roelofs, J.; Peters, M.L.; McCracken, L.; Vlaeyen, J.W. The pain vigilance and awareness questionnaire (PVAQ): Further psychometric evaluation in fibromyalgia and other chronic pain syndromes. Pain 2003, 101, 299–306. [Google Scholar] [CrossRef]
- Heidari, F.; Afshari, M.; Moosazadeh, M. Prevalence of fibromyalgia in general population and patients, a systematic review and meta-analysis. Rheumatol. Int. 2017, 37, 1527–1539. [Google Scholar] [CrossRef] [PubMed]
- Raichlen, D.A.; Alexander, G.E. Adaptive capacity: An evolutionary neuroscience model linking exercise, cognition, and brain health. Trends Neurosci. 2017, 40, 408–421. [Google Scholar] [CrossRef]
- Diamond, J.M. The worst mistake in the history of the human race. Discover 1987, 8, 64–66. [Google Scholar]
- Gevirtz, C. Repetitive Strain Injury: Pain management considerations. Top. Pain Manag. 2011, 27, 1–7. [Google Scholar] [CrossRef]
- Lira, M.R.; da Silva, R.R.L.; Bataglion, C.; dos Santos Aguiar, A.; Greghi, S.M.; Chaves, T.C. Multiple diagnoses, increased kinesiophobia?-Patients with high kinesiophobia levels showed a greater number of temporomandibular disorder diagnoses. Musculoskelet. Sci. Pract. 2019, 44, 102054. [Google Scholar] [CrossRef] [PubMed]
- Thomas, E.; Pers, Y.M.; Mercier, G.; Cambiere, J.P.; Frasson, N.; Ster, F.; Hérisson, C.; Blotman, F. The importance of fear, beliefs, catastrophizing and kinesiophobia in chronic low back pain rehabilitation. Ann. Phys. Rehabil. Med. 2010, 53, 3–14. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Snijders, T.; Aussieker, T.; Holwerda, A.; Parise, G.; van Loon, L.J.; Verdijk, L.B. The concept of skeletal muscle memory: Evidence from animal and human studies. Acta Physiol. 2020, 229, e13465. [Google Scholar] [CrossRef]
- Tozzi, P. Does fascia hold memories? J. Bodyw. Mov. Ther. 2014, 18, 259–265. [Google Scholar] [CrossRef] [Green Version]
- Pontzer, H.; Wood, B.M.; Raichlen, D.A. Hunter-gatherers as models in public health. Obes. Rev. 2018, 19, 24–35. [Google Scholar] [CrossRef]
- Wilson, P.R.; Stanton-Hicks, M.; Bruehl, S.; Harden, R.N. Proposed new diagnostic criteria for complex regional pain syndrome. Pain Med. 2007, 8, 326–331. [Google Scholar]
- Eldufani, J.; Elahmer, N.; Blaise, G. A medical mystery of complex regional pain syndrome. Heliyon 2020, 6, e03329. [Google Scholar] [CrossRef]
- Bélanger, C.; Morin, B.B.; Brousseau, A.; Gagné, N.; Tremblay, A.; Daigle, K.; Goffaux, P.; Léonard, G. Unpredictable pain timings lead to greater pain when people are highly intolerant of uncertainty. Scand. J. Pain 2017, 17, 367–372. [Google Scholar] [CrossRef] [Green Version]
- Bergamin, J.A. Being-in-the-flow: Expert coping as beyond both thought and automaticity. Phenomenol. Cogn. Sci. 2017, 16, 403–424. [Google Scholar] [CrossRef] [Green Version]
- Stamatelopoulou, F.; Pezirkianidis, C.; Karakasidou, E.; Lakioti, A.; Stalikas, A. “Being in the Zone”: A Systematic Review on the Relationship of Psychological Correlates and the Occurrence of Flow Experiences in Sports’ Performance. Psychology 2018, 9, 2011–2030. [Google Scholar] [CrossRef] [Green Version]
- Hauser, T. The Black Lights: Inside the World of Professional Boxing; University of Arkansas Press: Fayetteville, NC, USA, 2000. [Google Scholar]
- Jackson, S.A. Factors influencing the occurrence of flow state in elite athletes. J. Appl. Sport Psychol. 1995, 7, 138–166. [Google Scholar] [CrossRef]
- Leźnicka, K.; Pawlak, M.; Białecka, M.; Safranow, K.; Cięszczyk, P. Pain perception and cardiovascular system response among athletes playing contact sports. Res. Sports Med. 2017, 25, 290–299. [Google Scholar] [CrossRef]
- Shirazibeheshti, A.; Cooke, J.; Chennu, S.; Adapa, R.; Menon, D.K.; Hojjatoleslami, S.A.; Witon, A.; Li, L.; Bekinschtein, T.; Bowman, H. Placing meta-stable states of consciousness within the predictive coding hierarchy: The deceleration of the accelerated prediction error. Conscious. Cogn. 2018, 63, 123–142. [Google Scholar] [CrossRef] [Green Version]
- Diaz, K.M.; Howard, V.J.; Hutto, B.; Colabianchi, N.; Vena, J.E.; Safford, M.M.; Blair, S.N.; Hooker, S.P. Patterns of sedentary behavior and mortality in US middle-aged and older adults: A national cohort study. Ann. Intern. Med. 2017, 167, 465–475. [Google Scholar] [CrossRef]
- Hu, F.B. Sedentary lifestyle and risk of obesity and type 2 diabetes. Lipids 2003, 38, 103–108. [Google Scholar] [CrossRef]
- De Bruin, L.; Michael, J. Prediction error minimization as a framework for social cognition research. Erkenntnis 2018, 86, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Zügel, M.; Maganaris, C.N.; Wilke, J.; Jurkat-Rott, K.; Klingler, W.; Wearing, S.C.; Findley, T.; Barbe, M.F.; Steinacker, J.M.; Vleeming, A.; et al. Fascial tissue research in sports medicine: From molecules to tissue adaptation, injury and diagnostics: Consensus statement. Br. J. Sports Med. 2018, 52, 1497. [Google Scholar] [CrossRef] [Green Version]
- Littlejohn, G.; Guymer, E. Key milestones contributing to the understanding of the mechanisms underlying fibromyalgia. Biomedicines 2020, 8, 223. [Google Scholar] [CrossRef]
- Lavery, M.J.; Stull, C.; Kinney, M.O.; Yosipovitch, G. Nocturnal pruritus: The battle for a peaceful night’s sleep. Int. J. Mol. Sci. 2016, 17, 425. [Google Scholar] [CrossRef] [Green Version]
- Metzinger, T. Empirical perspectives from the self-model theory of subjectivity: A brief summary with examples. Prog. Brain Res. 2008, 168, 215–245. [Google Scholar] [PubMed]
- Allen, M.; Tsakiris, M. The body as first prior: Interoceptive predictive processing and the primacy. In The Interoceptive Mind: From Homeostasis to Awareness; Tsakiris, M., De Preester, H., Eds.; Oxford University Press: Oxford, UK, 2018; pp. 27–45. [Google Scholar]
- Sedley, W.; Friston, K.J.; Gander, P.E.; Kumar, S.; Griffiths, T.D. An integrative tinnitus model based on sensory precision. Trends Neurosci. 2016, 39, 799–812. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Haslam, N. Unicorns, snarks, and personality types: A review of the first 102 taxometric studies of personality. Aust. J. Psychol. 2019, 71, 39–49. [Google Scholar] [CrossRef] [Green Version]
- Soares, H.R.; Pinheiro, A.R.; Crasto, C.; Barbosa, P.; Dias, N.; de Carvalho, P. Diagnostic ultrasound assessment of deep fascia sliding mobility in vivo: A scoping review—Part 1: Thoracolumbar and abdominal fasciae. J. Bodyw. Mov. Ther. 2021, 27, 92–102. [Google Scholar] [CrossRef]
- Baumgartner, M. Parsimony and causality. Qual. Quant. 2015, 49, 839–856. [Google Scholar] [CrossRef]
- Puvanasvaran, A.P.; Jamibollah, N.; Norazlin, N. Integration of poka yoke into process failure mode and effect analysis: A case study. Am. J. Appl. Sci. 2014, 11, 1332. [Google Scholar] [CrossRef]
- Parker, S.; Wall, T.D. Job and Work Design: Organizing Work to Promote Well-Being and Effectiveness; Sage: Thousand Oaks, CA, USA, 1998. [Google Scholar]
- Joly, M.P.; Teixeira, J.G.; Patrício, L.; Sangiorgi, D. Leveraging service design as a multidisciplinary approach to service innovation. J. Serv. Manag. 2019, 30, 681–715. [Google Scholar] [CrossRef] [Green Version]
- Rufa, A.; Beissner, K.; Dolphin, M. The use of pain neuroscience education in older adults with chronic back and/or lower extremity pain. Physiother. Theory Pract. 2019, 35, 603–613. [Google Scholar] [CrossRef]
- Gardner, J.; Samuel, G.; Williams, C. Sociology of low expectations: Recalibration as innovation work in biomedicine. Sci. Technol. Hum. Values 2015, 40, 998–1021. [Google Scholar] [CrossRef]
- Gardner, J. Managing expectations, aligning futures. In Rethinking the Clinical Gaze; Palgrave Macmillan: Cham, Switzerland, 2017; pp. 145–167. [Google Scholar]
- Witiw, C.D.; Mansouri, A.; Mathieu, F.; Nassiri, F.; Badhiwala, J.H.; Fessler, R.G. Exploring the expectation-actuality discrepancy: A systematic review of the impact of preoperative expectations on satisfaction and patient reported outcomes in spinal surgery. Neurosurg. Rev. 2018, 41, 19–30. [Google Scholar] [CrossRef]
- Hills, R.; Kitchen, S. Toward a theory of patient satisfaction with physiotherapy: Exploring the concept of satisfaction. Physiother. Theory Pract. 2007, 23, 243–254. [Google Scholar] [CrossRef]
- Perini, L. Explanation in two dimensions: Diagrams and biological explanation. Biol. Philos. 2005, 20, 257–269. [Google Scholar] [CrossRef]
- Shaw, J.; Dunnm, S.; Heinrich, P. Managing the delivery of bad news: An in-depth analysis of doctors’ delivery style. Patient Educ. Couns. 2012, 87, 186–192. [Google Scholar] [CrossRef]
- Verheul, W.; Sanders, A.; Bensing, J. The effects of physicians’ affect-oriented communication style and raising expectations on analogue patients’ anxiety, affect and expectancies. Patient Educ. Couns. 2010, 80, 300–306. [Google Scholar] [CrossRef] [Green Version]
- Button, A.; Merk, D.; Hiss, J.A.; Schneider, G. Automated de novo molecular design by hybrid machine intelligence and rule-driven chemical synthesis. Nat. Mach. Intell. 2019, 1, 307–315. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Q.; Zhao, D.; Chen, Y. Lane change decision-making through deep reinforcement learning with rule-based constraints. In Proceedings of the International Joint Conference on Neural Networks, Budapest, Hungary, 14–19 July 2019; p. N-2051. [Google Scholar]
- Martin-Maroto, F.; Polavieja, G.G. Algebraic Machine Learning. arXiv 2018, arXiv:1803.05252. [Google Scholar]
- Kirchhoff, M. Predictive brains and embodied, enactive cognition: An introduction to the special issue. Synthese 2018, 195, 2355–2366. [Google Scholar] [CrossRef] [Green Version]
- Ramstead, M.J.D.; Badcock, P.B.; Friston, K.J. Answering Schrödinger’s question: A free-energy formulation. Phys. Life Rev. 2018, 24, 1–16. [Google Scholar] [CrossRef]
- Badcock, P.B.; Friston, K.J.; Ramstead, M.J. The hierarchically mechanistic mind: A free-energy formulation of the human psyche. Phys. Life Rev. 2019, 31, 104–121. [Google Scholar] [CrossRef]
- Newen, A.; Bruin, L.; Gallagher, S. (Eds.) Oxford Handbook of 4E Cognition; Oxford Library of Psychology, Oxford University Press: Oxford, UK, 2018. [Google Scholar]
- Hipólito, I.; Baltieri, M.; Friston, K.; Ramstead, M.J. Embodied skillful performance: Where the action is. Synthese 2021, 1–25. [Google Scholar] [CrossRef]
- Ridderinkhof, K.R.; Brass, M. How kinesthetic motor imagery works: A predictive-processing theory of visualization in sports and motor expertise. J. Physiol.-Paris 2015, 109, 53–63. [Google Scholar] [CrossRef]
- Eisenhardt, K.M.; Graebner, M.E. Theory building from cases: Opportunities and challenges. Acad. Manag. J. 2007, 50, 25–32. [Google Scholar] [CrossRef]
Figure 1.
Critical realist generative causal mechanism as a meta-generative model in hierarchical predictive processing: (a) in balance with sensory inputs; (b) determines attention, expectation, and action irrespective of sensory inputs.
Figure 1.
Critical realist generative causal mechanism as a meta-generative model in hierarchical predictive processing: (a) in balance with sensory inputs; (b) determines attention, expectation, and action irrespective of sensory inputs.
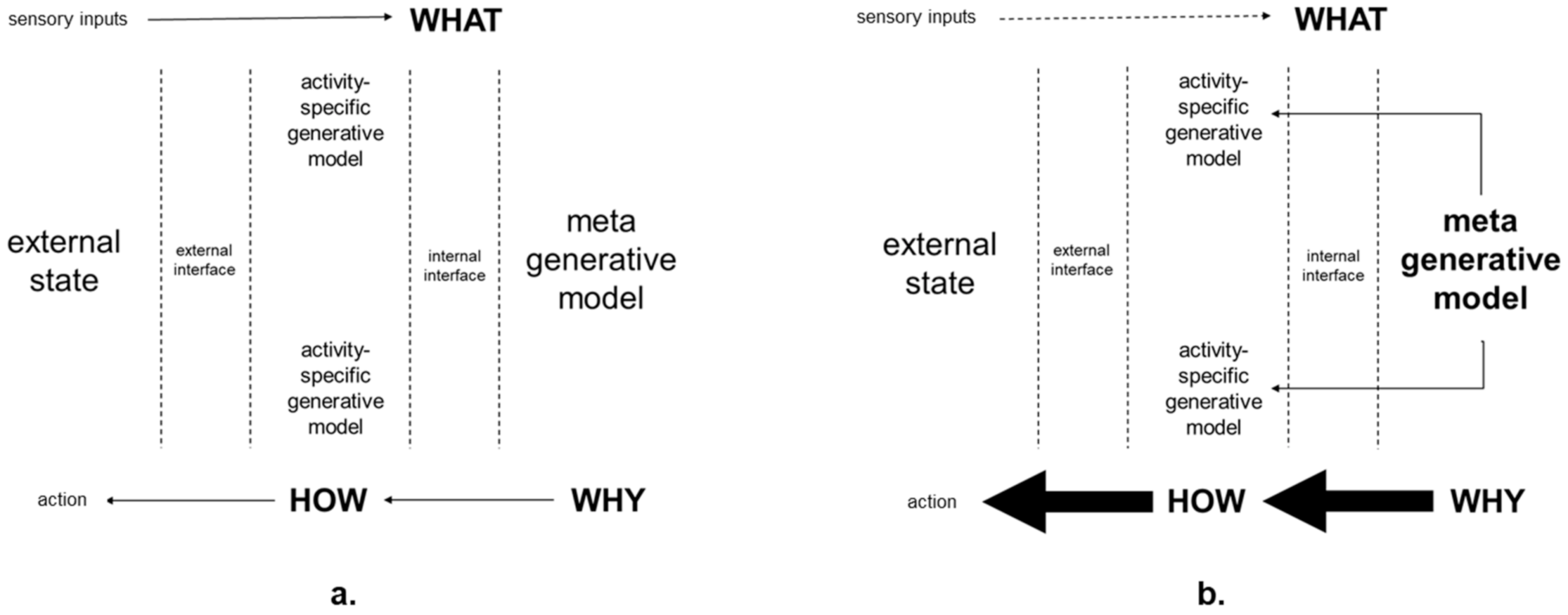
Figure 2.
Critical realist PNGW why, how, and what.
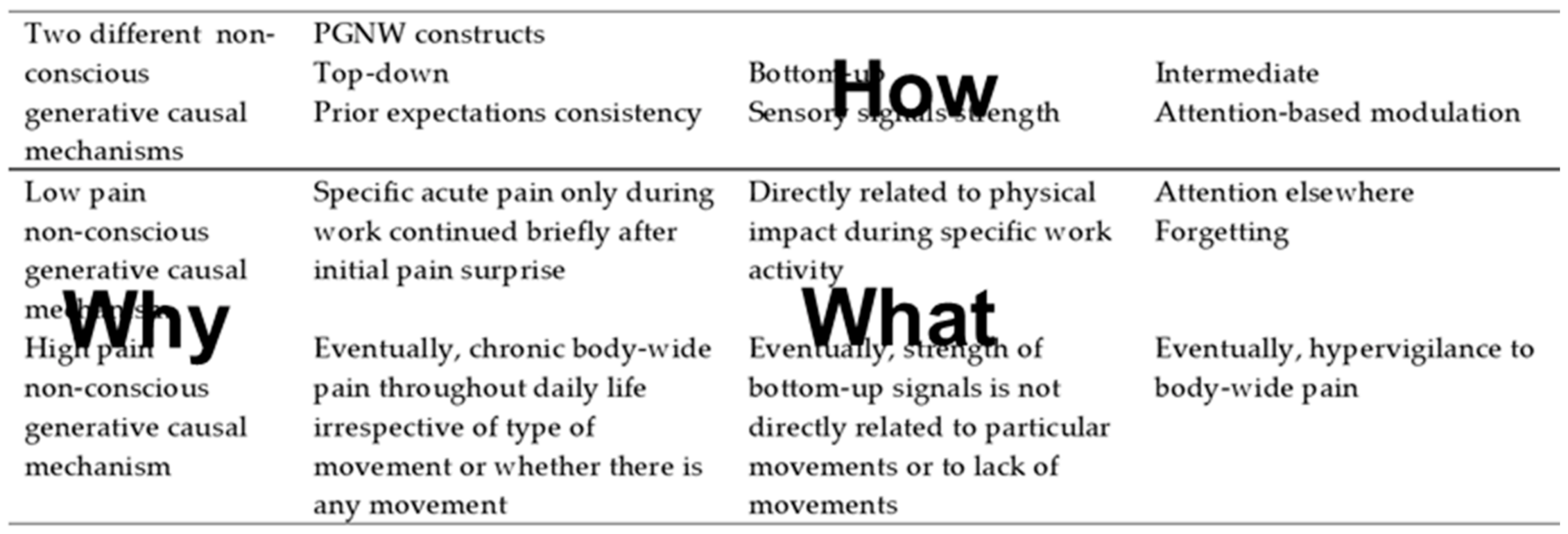

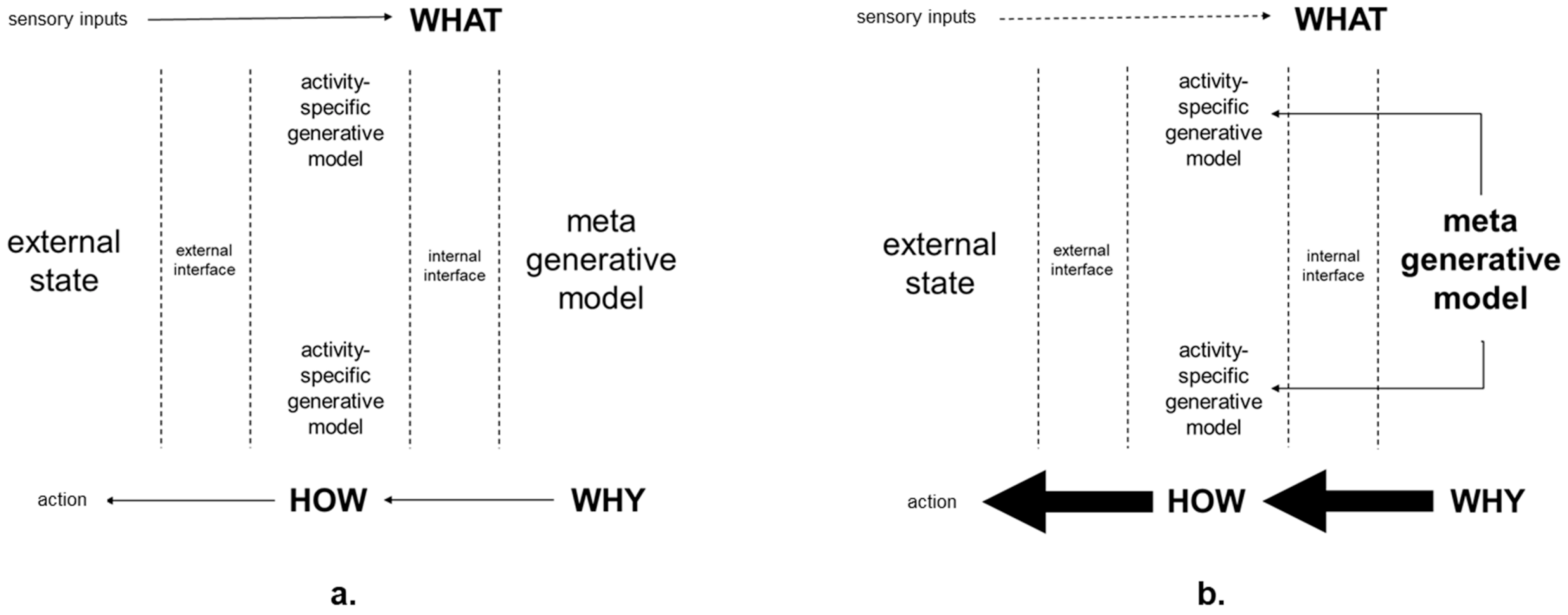{kind=link}
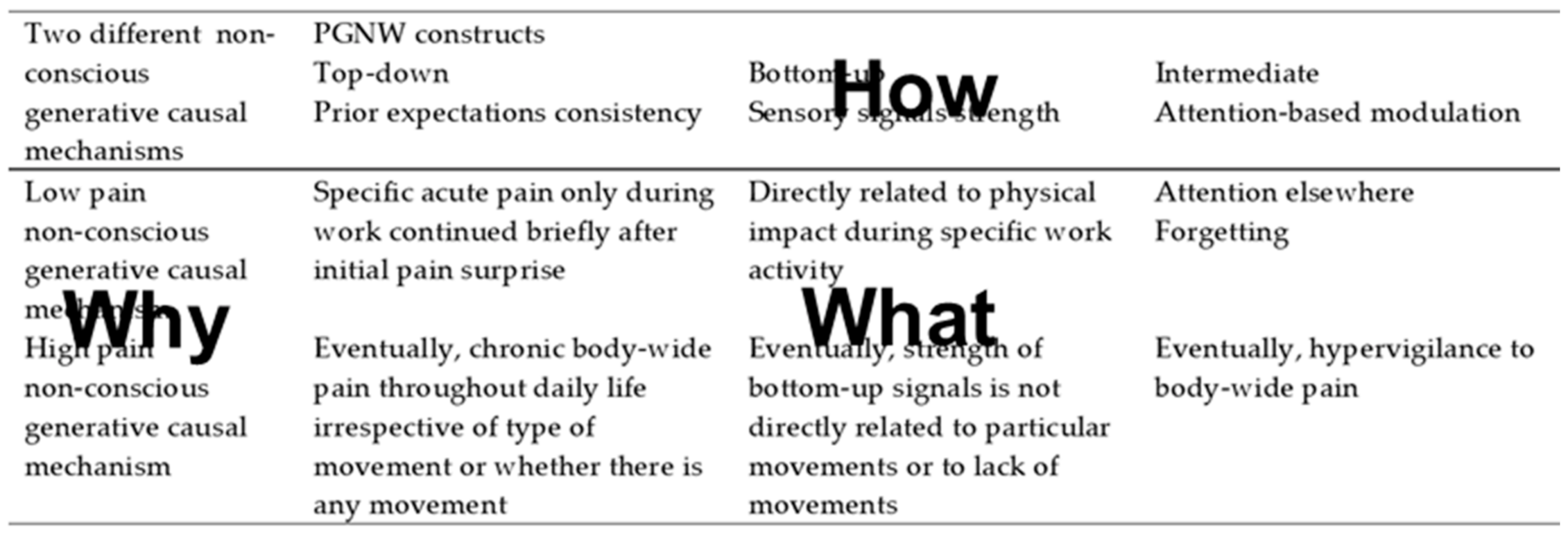{kind=link}
Table 1.
Examples of non-conscious psychomotor generative causal mechanisms.
| Critical Realist Non-Conscious Generative Causal Mechanism | Low Pain Non-Conscious Generative Mechanism | High Pain Non-Conscious Generative Mechanism | |
|---|---|---|---|
| Tendencies | Personality type | Not prone to pain anxiety | Prone to pain anxiety |
| Hardiness level | High | Low | |
| Powers | Fascia densification | Minor fascia densification | Widespread fascia densification |
| Body memories | Fast recovery from local pain | Widespread persistent pain | |
Table 2.
Two examples of relating PGNW to critical realist psychomotor experience.
| Two Different Non-Conscious Generative Causal Mechanisms | PGNW Constructs | ||
|---|---|---|---|
| Top-Down | Bottom-Up | Intermediate | |
| Prior Expectations Consistency | Sensory Signals Strength | Attention-Based Modulation | |
| Low pain non-conscious generative causal mechanism | Specific acute pain only during work continued briefly after initial pain | Directly related to physical impact during specific work activity | Attention elsewhere Forgetting |
| High pain non-conscious generative causal mechanism | Eventually, chronic body-wide pain throughout daily life irrespective of type of movement or whether there is any movement | Eventually, strength of bottom-up signals is not directly related to particular movements or to lack of movements | Eventually, hypervigilance to body-wide pain |
Table 3.
Directions for future research.
| Non-Conscious Generative Causal Mechanism (Meta Generative Model) | PGNW Constructs | |||
|---|---|---|---|---|
| Top-Down | Bottom-Up | Intermediate | ||
| Consistency of Prior Expectations | Strength of Sensory Signals | Attention-Based Modulation | ||
| Tendencies | Personality type Hardiness level | How do interactions between them, fascia and body memory affect expectations? | To what extent, if any, do they affect rate and spread of fascia densification? | How do interactions between them, fascia and body memory affect attention? |
| Powers | Fascia densification Body memory | How does fascia hold and update body memory in the forming of expectations? | How does fascia densification affect intero, noci-, and proprioception? | How does interaction between fascia and body memory affect attention? |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Fox, S. Psychomotor Predictive Processing. Entropy 2021, 23, 806. https://doi.org/10.3390/e23070806
AMA Style
Fox S. Psychomotor Predictive Processing. Entropy. 2021; 23(7):806. https://doi.org/10.3390/e23070806
Chicago/Turabian StyleFox, Stephen. 2021. "Psychomotor Predictive Processing" Entropy 23, no. 7: 806. https://doi.org/10.3390/e23070806
APA StyleFox, S. (2021). Psychomotor Predictive Processing. Entropy, 23(7), 806. https://doi.org/10.3390/e23070806
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.