1. Introduction
Many if not most real-world phenomena are intrinsically non-stationary, while most if not all classical tools such as Fourier analysis and power spectrum, correlation function, wavelet transforms, etc., are only defined for—and hence supposed to operate on—signals which are stationary. The assumption that a signal or a stochastic process is stationary can either be strict, as in the most formal approaches, or made weaker, as a pragmatic adaptation to the tools used during analysis. The strict stationarity assumption requires all statistical properties, including the probability density function and the complete dependence structure, to be time-invariant. The weak-sense stationarity assumption most commonly used in practice requires the first two moments of the probability distribution to exist and to be time-invariant, as well as the auto-covariance function that is required to be time-translation invariant, which leads to the definition of the correlation function.
The weak stationarity hypothesis is commonly used to analyze data obtained in various physical, natural, medical or complex systems, in order to apply classical techniques involving the correlation function. While sometimes very well adapted to the data, it may in other situations be a little far-stretched. Let us consider two typical situations which arise, for example, in weather and climate data series: trends and periodic evolutions, which are known for leading towards long-range dependences [
1], and hence possible non-stationarity. For non-stationary signals which present a drift or a trend, a very common and elegant technique consists of time-deriving the signal, and hoping or hypothesizing that the resulting quantity is stationary. If the original trend is not linear in time, a residual trend may still be present in the time-derivative; one can then imagine time-deriving again, iteratively, until the required stationarity assumption is satisfied. Unfortunately, this modus operandi has a drawback, in that it amplifies noise at larger frequencies or smaller scales where it strongly perturbs the power spectrum. As a consequence, it may be difficult to confirm a posteriori whether the iterative time-derivation really gives a stationary process. For signals that present periodic components, one can restrict the analysis to short time-intervals (examining the weather changes, e.g., temperature fluctuations, over the course of a week should not be impaired by seasonal variations), or on the contrary to long time-intervals (averaging temperature over the course of a year, or heavily sub-sampling in order to remove any seasonal variation [
2]). Unfortunately, this may be extremely reductive and may result in dropping a lot of interesting information located at small scales.
It therefore seems interesting to suggest that the notion of stationarity may depend on the scale at which one is considering the process. Whether one is dealing with epidemiology [
3], climate [
4], meteorology [
2] or animal populations [
5] among an immense number of possible fields, one might be interested in quantifying the non-stationarity of a dataset depending on the observation scale.
Identifying and characterizing non-stationarity has always been of utmost importance [
6,
7]. Since then, many rigorous techniques have been developed to analyze specific long-range dependences’ properties, as can be seen, for example, in [
1] for a recent review. To more specifically gauge and quantify non-stationarity, various approaches have been proposed [
8,
9,
10,
11,
12,
13] that are based on testing the hypothesis that the process (or sometimes its time-derivative) is stationary with an either positive or negative answer. Depending on the very stationarity hypothesis that is tested, various kinds of non-stationarity are then considered. Other approaches have suggested using the roughness of the process, computed in sliding windows, to quantify the order of its non-stationarity [
14]. We proposed following such an approach, but generalizing it on the full range of scales, without restricting it to an appropriate time window. The roughness or regularity of a signal is described by its Hurst exponent
, which can be defined when the power spectrum density of the signal behaves as a power-law of the frequency with an exponent
by asserting
. For example, according to the Kolmogorov K41 theory [
15], the power spectrum of the Eulerian velocity—the kinetic energy spectrum —in an isotropic and homogeneous turbulent flow behaves as a power law with the exponent
, which corresponds to a Hurst exponent
[
16]. As we discuss in this article, such a power law power spectrum cannot exist in the full range of frequencies for a physical process and it is usually expected that at smaller frequencies—or larger time scales—the process should be stationary. In that respect, one could use any method to assess the roughness of a signal and estimate the Hurst exponent [
17], e.g., using the multifractal formalism [
18,
19].
In this article, we introduce an index based on information theory to quantify the stationarity of a signal. Not only is this index able to indicate whether a realization of the process is stationary at a given scale—typically the size of the realization—but its evolution across scales also indicates how rough and non-stationary the process is. This index can be interpreted as measuring the extra information contained in the increment of size at time t of the process that is not measured when instead considering the information in the variable at time t that is not present in the variable at time . By varying the scale , the index can explore a full range of scales. As a consequence, the index is a multi-scale quantity. Moreover, it is not restricted to the first two moments of the density distribution, nor to the covariance, but probes the complete dependences in the process. We show how the index behaves for various synthetic and real-world processes using fluid turbulence and its diverse landscapes with various scale-invariance properties as the main illustrative theme across our numerical explorations.
This article is organized as follows. In
Section 2, we introduce the new stationarity index using information theory. Within the general time-dependent framework and within an appropriately time-averaged framework, we introduce all the building blocks that we then assemble to construct a non-stationarity index. In the limit case of processes with Gaussian statistics and adequate stationarity, we derived analytical expressions for this index. In
Section 3, we present our findings on fractional Gaussian noise (fGn), and successive time-integrations of the fGn, which are increasingly non-stationary. We use these Gaussian scale-invariant processes with long-range dependence structures as a set of benchmarks where numerical estimations can be compared with analytical results. In
Section 4, we focused on synthetic processes that were previously designed to satisfy important physical properties, namely to be stationary at larger scales, as well as smooth enough at smaller scales. We explore how our index can characterize non-stationarity depending on the scale on such realistic or physical processes. In
Section 5, we use our index to analyze experimental datasets acquired in various fluid turbulence setups, and discuss how such complex real-world data may differ from the synthetic signals of former sections. Finally,
Section 6 sums up our work and suggests future perspectives.
2. A Measure of Stationarity and Regularity Using Information Theory
This section introduces a novel measure based on information theory to probe the stationarity or the regularity of a discrete-time signal
X, viewed as a discrete-time stochastic process
. After setting up our notations, we recall definitions of time-dependent entropies in the general framework where statistics of the process are considered at a fixed time
t. We then present the more convenient and practical “time-averaged framework” [
20] which is better suited for real-world signals where the number of realizations may be very small. Within this practical framework, entropies are defined using averages over a time window which represents, for example, the time duration of an experiment. The new stationarity/regularity measure is then defined in both frameworks.
For a discrete-time stochastic process
, we note
as its probability density function (PDF) at any fixed time
t, i.e., the PDF of the random variable
. To access the temporal dynamics, we use the Takens time-embedding procedure [
21] and consider at a given time
t the
m-dimensional vector:
where the time delay
is the time scale that we are probing and the embedding dimension
m controls the order of the statistics which are explicitly involved. We note
as the corresponding stochastic process at the time scale
.
In addition to the time-embedding procedure, we also consider increments of the signal
X at time-scale
. At a given time
t, such an increment reads:
and we define the stochastic process
at the time scale
.
We use in this article the differential entropy for continuous processes, although all results presented here hold for discrete processes, by using the Shannon entropy. Given a probability density function (PDF)
p, the entropy is a functional of
p:
Given a process
X, we define below various entropies or combinations of entropies of various PDF of random variables pertaining to either increments (
2) or time-embedded vectors (
1). The information theory quantities that we discuss below for
X thus depend on the time-scale
; varying the time-scale
allows a multi-scale analysis of the process dependences.
2.1. General Framework
We recall here how one can define entropies for any stochastic process X, whether X is stationary or non-stationary. Because the PDF of the random variable a priori depends on time t, each random variable is considered separately. Within this very general framework, different entropies are defined for the process X at each time step t.
2.1.1. Shannon Entropy of the Time-Embedded Process
We define
, the entropy of the time-embedded process
at time
t, using the entropy Formula (
3) for the
m-dimensional multivariate PDF
of the random variable
:
This quantity depends on the time t at which the process is considered, as well as on the time scale involved in the embedding procedure. We simply note it for the signal X under consideration.
The entropy involves the complete PDF of the variable , including high-order moments. Therefore, it depends on high-order statistics. Nevertheless, it does not depend on the first-order moment and any random variable can be centered without altering its entropy.
For (no embedding), the entropy does not depend on nor on the dynamics of the process X; in that specific case, we simply note it . As soon as , the entropy depends on the complete dependence structure of the components of the embedded vector , and hence, probes the linear and non-linear dynamics of the process at scale and time t.
2.1.2. Shannon Entropy of the Increments
We define
as the entropy of the increments process
at time
t by applying the Definition (
3) to the PDF of the random variable
.
2.1.3. Entropy Rate
We define
, the entropy rate of order
m at time
t and at time-scale
of the process
X, as the variation of Shannon entropy between the random variables
and
, i.e., the increase in information from two successive time-embedded versions of the process
X at time
t:
where the auto-mutual information
is the mutual information between the two random variables
and
which together form the
time-embedded variable
:
For non-stationary processes,
offers a generalization of the auto-covariance. For stationary processes,
is independent on the time
t and is a generalization of the auto-correlation function [
22].
In the remainder of this article, we focus on the entropy rate of order , which we note .
2.2. Time-Averaged Framework
When a single realization of a process
X is available, we assume some form or ergodicity and treat the set of values
as realizations of a stationary process. This crude assumption is indeed fruitful, and very convenient when a single signal or a single time series is available. Let us note by
the time window of length
T corresponding to the available realization of
X. We consider the probability density function
obtained by considering all data points within the time window [
20]. Since this quantity is a time-average, it does not explicitly depend on time
t but on the total duration
T and on the starting time
.
Considering the time-embedded process
, the time-averaged PDF can be expressed as
For a stationary process, : the time-averaged PDF does not depend on T or and matches the stationary PDF of the process X. Using time-averaged PDFs for any process, we define ersatz versions of the entropies presented in the previous section as follows.
2.2.1. Shannon Entropy
We define the ersatz entropy
of the signal
X in the time window
as the entropy (
3) of the time-averaged PDF
of the time-embedded process
:
This entropy describes the complexity of the set of all successive values of the process in the time interval . It can be interpreted as the amount of information needed to characterize the available realization of the process in the time interval . It depends on T and but in order to simplify the notations, we drop the index in the following.
2.2.2. Entropy of the Increments
We define
, the ersatz entropy of the increments of the signal
X at the time scale
in the time window
, as the entropy (
3) of the time-averaged PDF of the increment process
.
2.2.3. Entropy Rate
We define the ersatz entropy rate
of the signal
X in the time window
as the increase in ersatz entropy when increasing the embedding dimension by +1. This is thus the same expression as in the general framework but using time-averaged probabilities along the trajectory of the process:
For non-stationary processes with centered stationary increments, only influences the mean of the distribution; all centered moments only depend on T, the size of the time-window. Therefore, in this case, all information quantities only depend on T.
2.3. Towards a Measure of Regularity and Stationarity
Exploring the dynamics along scales of a signal, viewed as a stochastic process, can be achieved with information theory in two distinct ways with the tools presented above. The first one is to consider the increments and compute their entropy. The second one is to consider the time-embedding and hence use the entropy rate. Both naturally introduce the time-scale and are able to probe the dependences between two variables of the process separated by .
On the one hand, the entropy of the increments measures the uncertainty—or information—in the increment which represents the variation between
and
. This approach is appropriate for signals which are not stationary but have stationary increments. It thus also offers a direct comparison with traditional tools which heavily rely on the use of increments to analyze signals. For example, Ref. [
23] used the entropy of the increments to examine a variety of synthetic multi-fractal processes together with experimental velocity measurements in fully developed turbulence.
On the other hand, the entropy rate (
or
) measures the amount of uncertainty—or new information—in the extra variable
that is not already accounted for when considering the variable
. As such, it can be viewed as a measure of the dependences at scale
. For example, in the case of stationary signals, the entropy rate can be used to characterize the scale-invariance of fully developed turbulence [
24] or to probe higher order dependences beyond mere second-order correlations [
22].
Both the entropy of the increments and the entropy rate can be computed in the time-averaged framework presented in
Section 2.2. Interestingly, for non-stationary processes with stationary increments, both measures are almost stationary, i.e., they only weakly depend on the time-interval length
T [
20]. While this property is expected for the entropy of the increments which are stationary—so
does not depend on
T or
t—this is more surprising for the entropy rate. This illustrates that the entropy of the increments and the entropy rate are not identical at all, albeit both exploring the dynamics between
and
. With this in mind, we propose using the difference between these two information quantities as an index to finely probe the non-stationarity of a process.
2.3.1. Relation between and in the General Framework
Given a non-stationary process
X, we define the index:
We can rewrite
by first expressing the entropy of
at time
t:
This follows from writing
as the sum
and using chained conditioned probabilities. According to Equation (
5a), the entropy rate of order 1 then reads:
where
is the mutual information between the signals
X and
Y, here the variable
and the increment
leading from
to
. This relation holds for any process; in particular, the stationarity of the increments is not required. This leads to:
where
is a combination of three entropies that can be rewritten as a mutual information; therefore, it is always greater than or equal to 0.
By Definition (
10)
quantifies the extra information—or extra uncertainty—which is present in the increment
but is not accounted for when measuring the increase in information between
and
. Then, the rewriting into (
13) shows that
also corresponds to the shared information between the walk
X at time
and the next increment
that leads to the walk at time
t. In other words,
is the difference between on the one hand the sum of the information contained in
and the information contained in the increment
, and on the other hand the information in the vector
. Both interpretations clearly illustrate that, although the information in the vectors
and
is the same (see Equation (
11)), the information in
cannot be obtained by combining the information of the process at time
together with the information in the increments between the two times
and
t.
2.3.2. Definition of an Index in the Time-Averaged Framework
The two terms in the right-hand side of Equation (
10) have counterparts in the time-averaged framework. We thus define, for any process
X indexed on a time-interval of length
T:
We show in the following how this quantity can be used to probe the non-stationarity of a signal under realistic conditions, i.e., when one can only compute entropies in the time-averaged framework, e.g., when a single realization is available. We further refer to as the stationarity or regularity index.
2.3.3. Expression for a Stationary Process with Gaussian Statistics
All information quantities considered here do not depend on the first moment of the process, which we now consider the zero-mean without loss of generality. For a process with Gaussian statistics, the dependence structure can be expressed using only the covariance. As a consequence, all terms in Equation (
14a) can be written in terms of the covariance.
Further assuming a stationary process
X, and noting
and
, its time independent standard deviation and correlation function, we have:
where
is the correlation matrix of the process
X and
is the variance of its increments
at scale
. Using
and plugging Equations (
15) and (16) into Equation (
14a) gives:
Thus, the index of a stationary process X does not depend on the standard deviation of X.
In the specific case of an uncorrelated Gaussian process, the index takes the special value . For positive correlations , the index is smaller: while for anti-correlations the index is larger . These results hold for any stationary Gaussian process.
When the correlation is small,
, Equation (
17) can be Taylor-expanded as
If we further assume that the process exhibits some self-similarity such that the variance
of its increments behaves as a power law of the scale
with the exponent
, i.e.,
, then taking the logarithm of Equation (
18) leads to
, up to an additive constant.
2.4. Estimation Procedures for Information Theory Quantities
All results reported in the present article were computed using nearest neighbors (
k-nn) algorithms: from Kozachenko and Leonenko [
25] for the entropy, and from Kraskov, Stögbauer and Grassberger [
26] for the mutual information estimator in Equations (
9b) and (
14b). These estimators have small bias and small standard deviation [
20,
22,
26,
27]. Additionally, for each value of the time scale
, we subsample the available data to eliminate the contribution of dependences from scales smaller than
[
28].
To have a better comparison between various processes, we always use realizations of the same size T, and normalize each realization so that the unit-time increments have a standard deviation equal to 1. This removes the trivial dependence of the entropy rate on the standard deviation, while it does not affect the index which does not depend on the standard deviation of the process.
4. Physical Stochastic Processes with Dissipative and Integral Scales
The fractional Brownian motion, just as the traditional random walk, is not a physical process encountered “as is” in nature, but a mathematical model with at least two drawbacks. Firstly, the power spectrum of the fBm behaves as a power law with an exponent , which implies that for , it has an infinite energy in the continuous limit. This is not usually a problem with discrete time, as the sampling frequency is finite. Secondly, in many non-stationary processes, the standard deviation diverges with time; this is for example the case if the process is scale invariant, such as the fBm. This is again not a problem as any realization under consideration has a finite duration. These two drawbacks are indeed related to the assumption of a perfect scale-invariance of the process in an infinite range of scales; whereas in a physical system, scale invariance is restricted to a finite range of scales only.
Introducing a high frequency cutoff or equivalently a small, or
dissipative, scale
is a common and natural way to prevent the divergence of the power spectrum; we refer to such an introduction as “
regularization” [
33] in this article. It also offers an interesting perspective to model the behavior of a physical system at smaller scales where the scale invariance property does not hold anymore. Introducing a large, or
integral, scale
is a natural way to prevent the divergence of the standard deviation of the process. Interestingly, this also leads to a “
stationarization” of the process at scales equal to or larger than
[
34] as we shall illustrate below. The goal of regularization and stationarization is to solve the two drawbacks of scale-invariant processes, and hence offer a “more physical” model for processes such as, e.g., fluid turbulence, to be compared with experimental data.
Fluid turbulence is an archetypal physical system that offers a perfect illustration. From the Kolmogorov 1941 perspective [
15,
16], the Eulerian velocity field in homogeneous and isotropic turbulence presents a well-known scale-invariance property—the power spectral density evolves as a power law of the wavenumber with an exponent −5/3—within a restricted region called the
inertial range. In any experimental realization, for a finite Reynolds number, the inertial range corresponds to an interval of scales bounded from below by the
dissipative scale and from above by the
integral scale. Within the inertial range, the scale-invariance of turbulent velocity is well described by a Hurst exponent
.
Several approaches have been proposed to synthesize a stochastic process that has the same properties as the turbulent velocity, as can be seen for example in [
35] and the references therein. Of particular interest for us is the explicit introduction of both a dissipative and an integral scale in order to have a bounded inertial range, which can be performed by implementing the convolution of a white noise in several ways. We choose in the following to analyze two specific stochastic processes where a dynamical stochastic equation and explicit analytical comparison with fluid turbulence are available: the first one is a regularized and stationarized fBm and the second one is a regularized fractional Ornstein–Uhlenbeck process [
34]. For consistency, we fix all along this section the small-scale
and the large-scale
. For each process under consideration, we first generate a very long realization with
data points and then divide it into segments of size
points over which we estimate our quantities using scales
in a logarithmic range between 1 and
. In order to analyze larger scales, we also down-sample the initial realization by a factor of 4, 16 and 64, and again perform the estimation on segments of the same size
points.
4.1. Regularized and Stationarized fBm
We present in this section the results obtained with the regularized and stationarized fBm
, a stochastic process introduced in [
33]. This process has Gaussian statistics and perfectly mimics an fBm—with a prescribed exponent
—in a finite range of time-scales. However, contrary to the fBm, it has a finite second-order structure function at the large scale, larger than
while its power spectrum behaves as a power law with exponent −3—corresponding to a Hurst exponent 1 —at scales smaller than
. This process is generated as the convolution of a Gaussian white noise with the product:
where
is a large-scale function that insures stationarization [
33]. Among possible functions
, we have used both the “bump” function
for
,
elsewhere, with
a particular value of the confluent hypergeometric function that ensures the normalization of
, and the Gaussian function
.
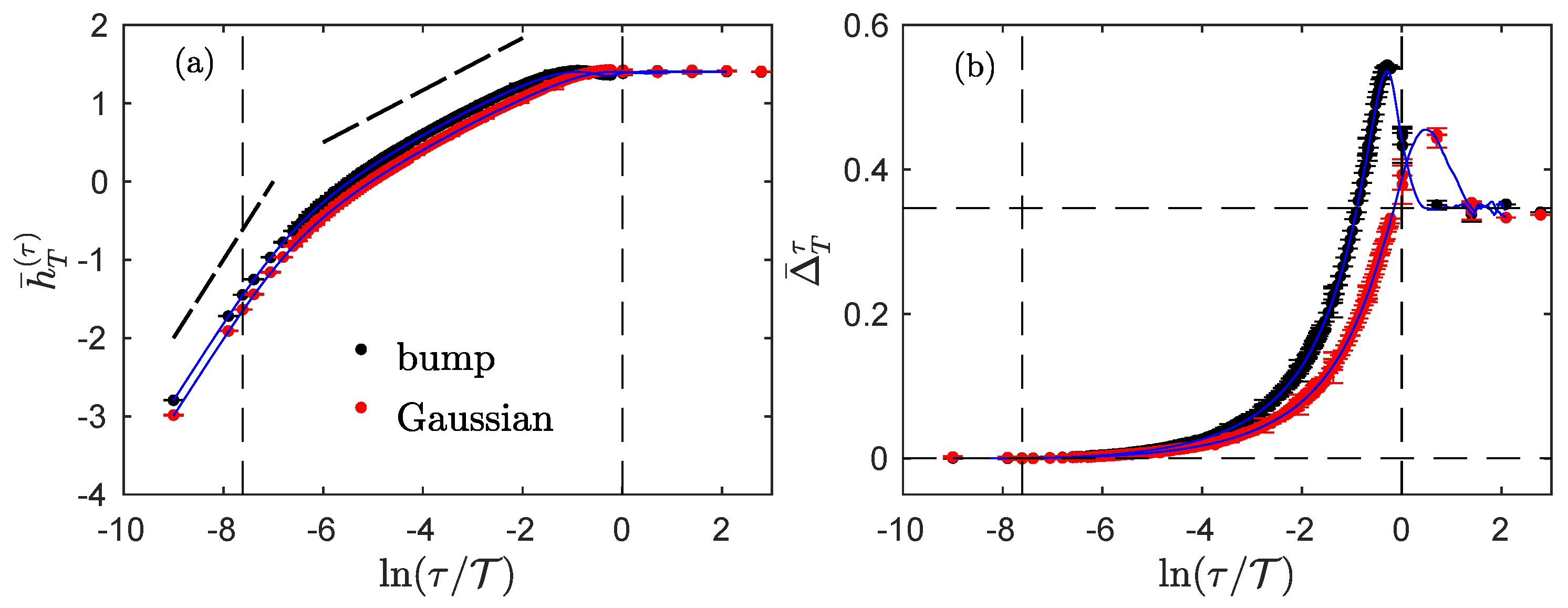
Figure 2 shows our findings for the two corresponding processes with
.
The entropy rate
evolution with the time scale
(
Figure 2a) reveals three different regimes, as would the power spectrum [
24]. Between the small and the large scales, indicated by vertical dashed lines, the entropy rate evolves linearly in
with a slope
, just as it would have for a traditional fBm: this is the inertial regime. For smaller scales below the dissipative scale, the entropy rate evolves faster, signaling the effect of the regularization: the slope is approximately +1 and the process is increasingly organized as the scale
is reduced. For larger scales, above the integral scale
, the entropy rate is maximal and does not evolve with
: the process is then the most disorganized. The transition from one regime to another is not sharp and it is difficult to recover the dissipative and integral scales by looking at the curve: both the effects of the regularization and of the stationarization invade the inertial region.
The index offers a deeper insight into the evolution of the dynamics of the process across the scales. For smaller scales, , as if the process was highly non-stationary as a time-integrated fBm would be. For larger scales above , , the value obtained for uncorrelated stationary processes such as a Gaussian random noise, i.e., an fGn with . In the inertial range, the index evolves non-monotonically between these two regimes, with a noticeable excursion above as if there are negative correlations at scales about the integral scale , before correlations vanishes at scales larger than the integral scale.
The evolution of the index
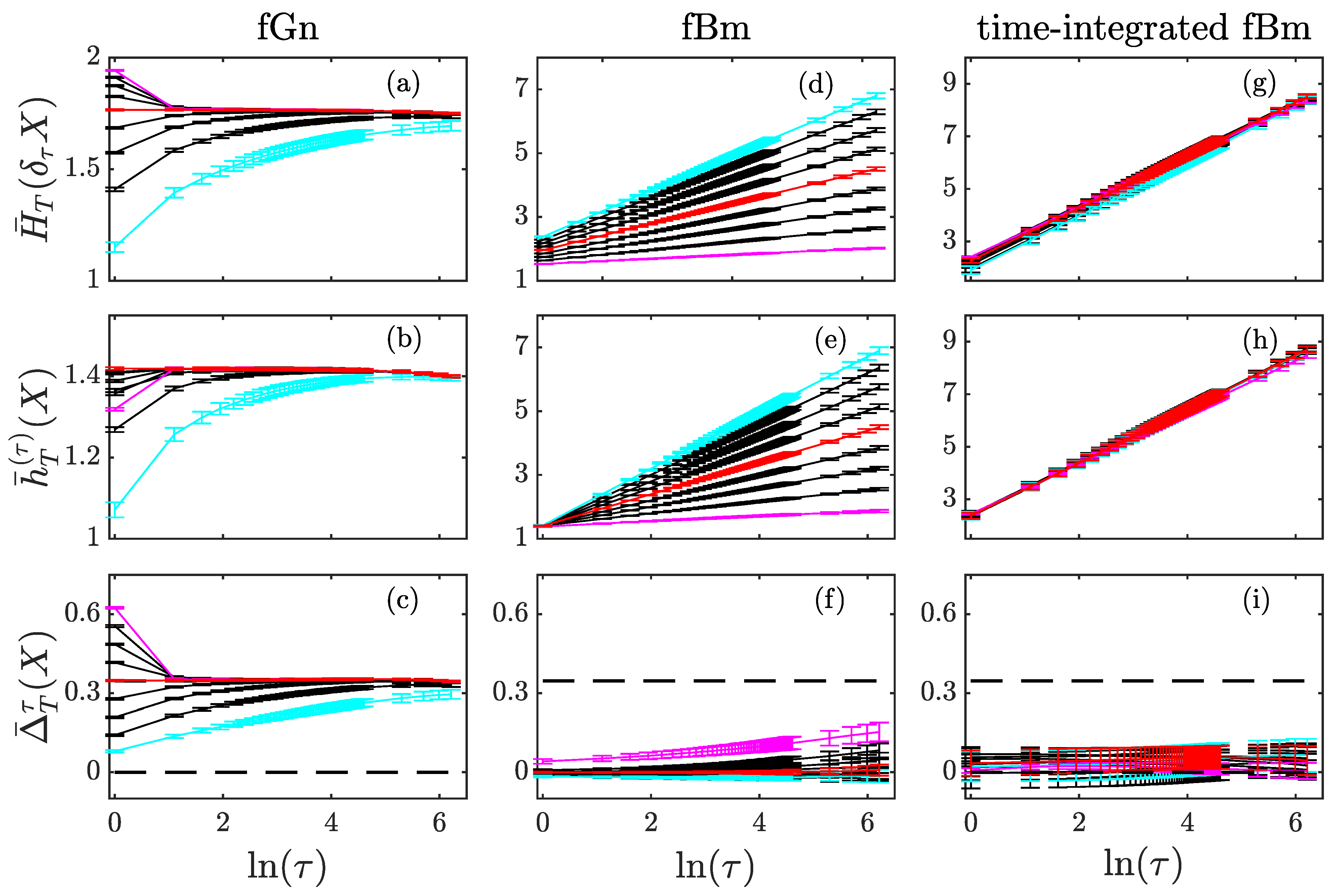
thus suggests that the process evolves from a highly non-stationary process at a smaller scale to a stationary process at larger scales. Again, the transition between regimes is not sharp, but the effects of regularization and the stationarization are clearly visible, especially in comparison to the set of results for the fGn, fBm and time-integrated fBm presented in
Figure 1.
4.2. Regularized Fractional Ornstein–Uhlenbeck Process
In this section, we present the results obtained with a regularized fractional Ornstein–Uhlenbeck process [
34]. This Gaussian process is an extension of the Ornstein Ulhenbeck process which exhibits scale invariance with a Hurst exponent
in a range of time scales. The relaxation coefficient
in its stochastic equation defines the integral scale
while an ad hoc regularization is introduced at small scale
[
34]. For scales smaller than
, the power spectrum of the process behaves as a power law with exponent −2, corresponding to a Hurst exponent 1/2.
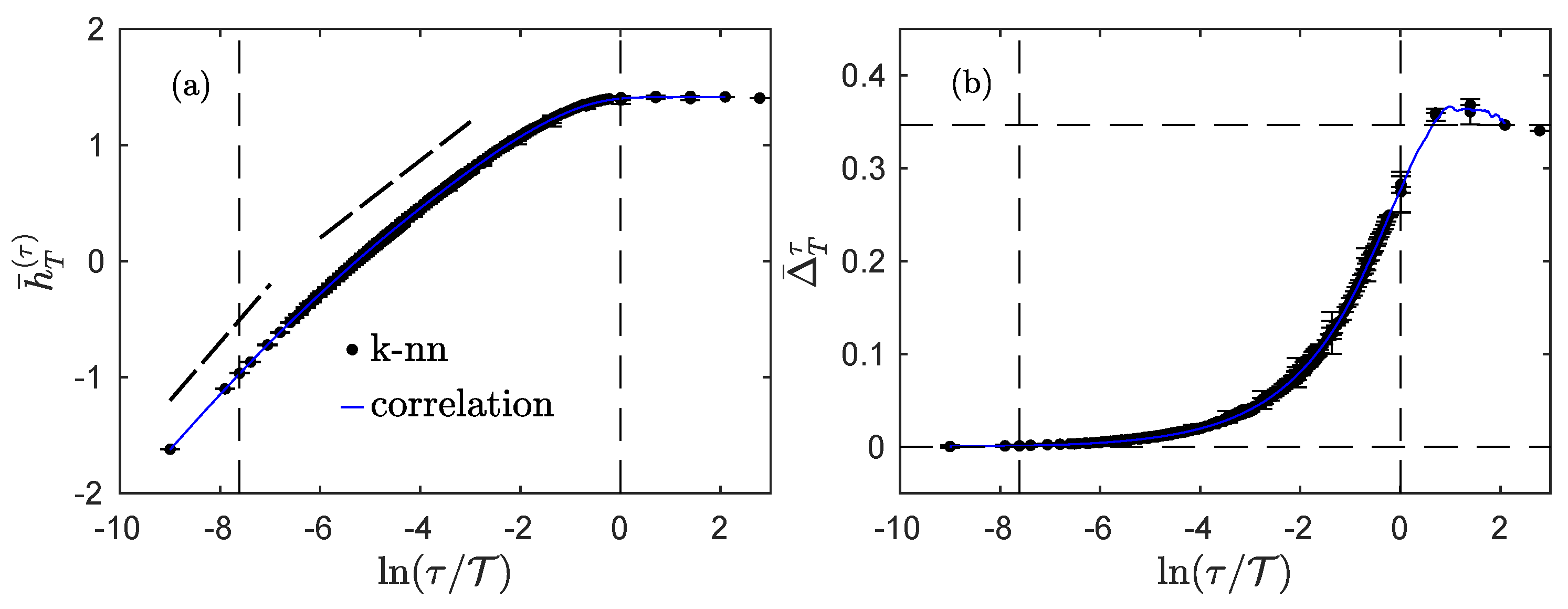
Figure 3 reports our findings for such a process with
. Because the process is Gaussian, and its increments are Gaussian at all scales
, we can also estimate its entropy rate
and its index
using Equations (
16) and (
17) in which we insert a numerical estimation of its correlation function; the corresponding estimations are reported in blue in
Figure 3. We note that both the entropy rate and the index are very well estimated using the correlation function only when compared to the full estimation involving combinations of entropies.
The evolution of the entropy rate
with
(
Figure 3a) is very similar to the one observed for the regularized and stationarized fBm (
Figure 2a), albeit the slope in the small scales region is different: it is close to +1/2, as expected, instead of +1 as for the fBm. The slope in the inertial range is again given by
, and a constant value is reached for scales larger than the integral scale, albeit a little lower than the one for the stationarized fBm.
The index presents a behavior similar to that of the stationarized fBm: it increases from 0 to , but the increase seems monotonic for the Ornstein–Uhlenbeck, or with a much smaller overshoot before reaching the constant value .
5. Fully Developed Fluid Turbulence
In this section, we analyze the experimental fluid turbulence in various experimental setups. As evoked in
Section 4, fluid turbulence is the physical archetypal system where a power law spectrum is observed in an
inertial range, in between a
dissipative scale and an
integral scale. While the fBm (
Section 3) with the Hurst exponent 1/3 is a classical model for the inertial range only [
15,
16], regularized and stationarized fBm as well as regularized fractional Ornstein–Uhlenbeck process (
Section 4), both offer more realistic models by including the
dissipative and
integral scales in addition to the inertial range. We now want to compare these two models with experiments, especially with regard to our new index.
We use two sets of Eulerian longitudinal velocity measurements which have been previously characterized in detail. The first dataset was obtained in a grid setup, in the Modane wind tunnel [
36]. The sampling frequency of the setup was 25 kHz, the mean velocity of the flow is
m/s, and the Taylor-scale based Reynolds number of the flow is approximately
, large enough for the flow to be considered as exhibiting fully developed turbulence. For this dataset, we use the Taylor frozen turbulence hypothesis [
16] in order to interpret temporal variations as spatial ones and we can then use the Bachelor model to estimate the larg- scale
m corresponding to a large temporal scale
= 36 ms. The second dataset was obtained from a helium jet setup [
37]. It consists of several experiments for various Taylor-scale based Reynolds numbers
, 208, 463, 703 and 929. For each experiment, we computed the integral scale
as the scale for which the index reaches the value corresponding to an uncorrelated Gaussian process, i.e.,
. We checked that this integral time scale
is in perfect agreement with the spatial integral time scale
L obtained from a fit of the Bachelor model, within the usual error bars, as reported in [
37].
To characterize the velocity datasets, we computed their entropy rate
as well as their index
, as the functions of the scale expressed with the non-dimensional ratio
. The results are presented in
Figure 4 for the Modane experiment and in
Figure 5 for the helium jet experiments.
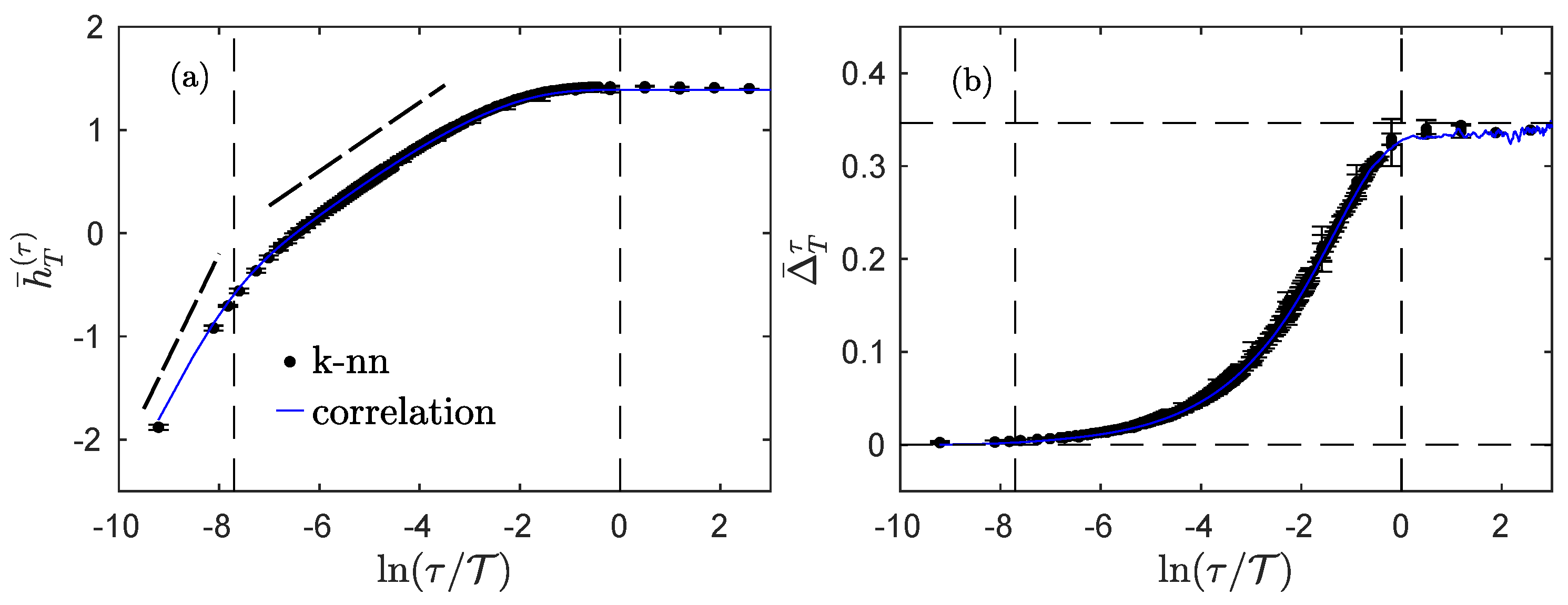
We first examined the Modane experiment which has a large Reynolds number. In
Figure 4a, we clearly see that the entropy rate reveals the three domains of scales described by the Kolmogorov theory [
15].
behaves as a power law with an exponent close to 1 in the dissipative domain, and with an exponent close to
in the inertial domain, while it reaches a plateau when entering the integral domain. Vertical dashed lines in
Figure 4a indicate the dissipative and integral scales as obtained with the Bachelor model [
38]. In
Figure 4b, we see that the index
evolves smoothly and monotonically from 0 at small scales, up to
—the value for a stationary an uncorrelated Gaussian process—at large scales.
It thus seem that, although the behavior of the entropy rate of the experimental fluid turbulence (
Figure 4a) is better described by the regularized and stationarized fBm model (
Figure 2a), the behavior of the index (
Figure 4b) bears greater resemblance to that of the fractional Ornstein–Uhlenbeck process (
Figure 3b).
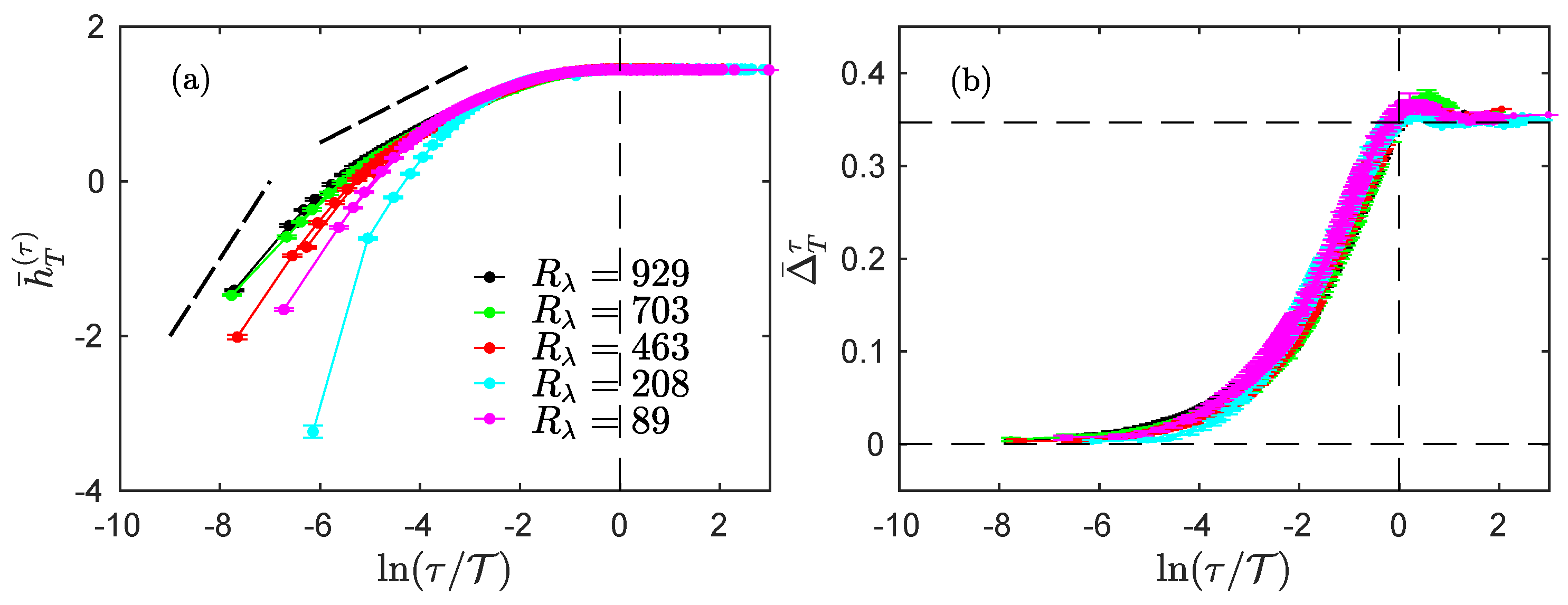
We then examined the influence of the Reynolds number by studying the helium jet experiments. In
Figure 4, we see that both the entropy rate
(
Figure 5a) and the index
(
Figure 5b) both behave as in the Modane experiment.
Let us first describe the evolution of the entropy rate with
from the large scales down to the smaller scales. For all Reynolds numbers,
is maximal and constant in the integral domain, while it linearly decreases with a slope
in the inertial range. For smaller scales below the dissipation scale, the entropy rate linearly decreases with a slope of approximately 1. As expected, when the Reynolds number is increased, the dissipation scale is smaller, and the inertial range is thus wider [
16].
We now describe the evolution of the index
with
. Again, the index varies from 0 at small scales to
at large scales, but all curves for all Reynolds numbers now seem to overlap. In particular, the dissipative scale does not seem to play a particular role in the behavior of the index. This may suggest that this quantity only probes the transition from the inertial range to the integral domain, i.e., the changes in the stationarity at the scale
. Interestingly, we see that the index
slightly overshoots the value
around the integral scale, before converging to this value from above for larger values of
. This behavior is more pregnant in experiments at
(magenta) and
(dark blue), and less obvious in the other ones. The transition of the index from 0 to
may not be monotonic, and thus similar to what was observed for the regularized and stationarized fBm (
Figure 2b) and the regularized fractional Ornstein–Uhlenbeck process (
Figure 3b); but in that respect, the behavior of the experimental jet data bear greater resemblance to that of the regularized fractional Ornstein–Uhlenbeck process.
In order to better apprehend what occurs around the integral scale and around the dissipative scale, we plot in
Figure 6 the logarithm of the index
, as a function of
, for the fractional Ornstein–Uhlenbeck process and experimental longitudinal velocity measurements.
Together with the estimation using the information theoretical Definition (
14b) (black dots), we also plot the simpler estimation that only uses the correlation function and Formula (
17) (blue line). This last measurement is only supposed to match the real estimation when the process is Gaussian and stationary, which is the case for the fractional Ornstein–Uhlenbeck: as can be seen in
Figure 6a, both estimates are indeed very close for all time scales. For experimental data, the agreement is very good at larger scales, from the inertial domain up to the integral domain, but a very noticeable deviation appears at smaller scales.
Let us first focus on the Modane experiment, which has the largest Reynolds number, to describe what happens at smaller scales. As observed in
Figure 4a, the entropy rate is very well approximated for all scales by Equation (
16) which uses the correlation only. For the index, the discrepancies at smaller scales may thus be expected to arise from the entropy of the increments according to Equation (
14a). It is important to remember that the statistics of the increments are Gaussian at larger scales only, about the integral scale and larger, while they are more and more non-Gaussian at smaller scales; this phenomena is referred to as the
intermittency of turbulence. The deviation from Gaussian statistics has previously been studied [
23] by measuring the extra information in the entropy of the increments, with respect to the entropy that can be estimated by assuming purely Gaussian statistics and using the standard deviation only. The presence of intermittency therefore leads to a larger value of the index compared to what can be estimated using only the correlation function. The difference between the two estimates should correspond to the Kullback–Leibler divergence introduced in [
23]. We note that only the index—in its complete information theoretical form —probes higher-order statistics and the full dependences of the process, whereas the correlation estimate (
17) only takes into account the second-order moment and correlations.
Looking at the behavior of the index for smaller scales, we also observe that there is no clear influence of the dissipative scale. Even after taking the logarithm—so even when enlarging the perspective on the smallest values of the index—the index seems to behave exactly the same in the inertial range and in the dissipative range, as a power law of the scale. The exponent of the power law can be derived, using the approximation (
18) for small correlation and assuming a Gaussian process with a power-law scaling of the variance of the increments; we then expect the exponent of the power law to be
for a scale-invariant process. The thick dashed black line in all panels of
Figure 6 represents this exponent
and shows that it offers a good approximation for all the processes under study here.
It is worth recalling that turbulence data are usually considered stationary, but this consideration is made at larger scales. A very local observation, i.e., considering smaller scales or examining a short portion of the velocity field, usually reveals a non-stationary process, in the form of local trends that eventually compensate when averaged over many short portions, hence over longer scales. This scale-dependent non-stationarity is measured by the index, and we interpret the difference between the index and its Gaussian approximation as an increase in non-stationarity due to the full dependence structure of the process.
6. Discussion and Conclusions
Using information theory, we proposed an index which is a good candidate to quantify the non-stationarity of a process at a given scale . This index is defined for a discrete-time process as the difference between the information contained in the increment at scale and the new information in that was not already present in . By varying the scale , the index allows a multi-scale characterization of the process.
The index takes real positive values. For Gaussian processes, a value of indicates stationarity, and lower values indicate some non-stationarity. The index saturates at zero for non-stationary processes, so the non-stationarity degree cannot be measured directly. Nevertheless, we showed using the fGn and its successive time-integrations that iteratively time-deriving the signal (or iteratively taking time-increments) and counting the number of iterations required to obtain values of the index close to should be enough to infer the integer part of the non-stationary degree. This methodology holds for non-Gaussian processes, although the very value for the constant might depend on the shape of the large-scale probability density function; we are currently investigating such processes which are not Gaussian at larger scales, and correspond to non-physical processes within our approach.
We showed that, for physically sound processes which are stationary at larger scales, the index is not only able to reveal at which scales larger or about the integral scale
the process is indeed stationary, but also to quantify how the process becomes non-stationary when the scale
is reduced. Using synthetic data as well as experimental velocity recordings in fluid turbulence, we showed that the index contains information that is not grasp by the correlation function alone, and because of its very definition, the index probes the full dependence structure of the process. We thus note that for a process to qualify as stationary, its index at larger scales (corresponding to the size of the observation time-window) must approach the value
, which implies that not only the correlations but also all dependences are vanishing while the distribution becomes more and more Gaussian when the scale is increased. It is worth noting that using the criterion
to define the (large) scale
at which all dependences have vanished leads to an integral scale estimation that is always larger than the integral scale
imposed in synthetic processes (
Figure 2 and
Figure 3), or larger than the integral scale
obtained from a fit of the Bachelor model (
Figure 4b). This is not surprising as the integral scale
indicates the typical location of the boundary between the inertial and integral domains, and so it corresponds to a region where both inertial and integral behaviors are overlapping, and some remaining dependences from the inertial range are expected to exist.
Additionally, the index does not distinguish between the inertial and dissipative domains, whereas the correlation and the power spectrum density both do. For scale-invariant processes with stationary increments and noting the Hurst exponent, the behavior of the index with the scale is very close to a power law with the exponent . We suggested that this property generalizes to multifractal processes where we expect the index to behave as a power law with the exponent .
As illustrated with scale-invariant processes, the non-stationarity is directly related to the roughness measured by the Hurst exponent
. The ersatz entropy rate
also offers a way to assess the Hurst exponent—which can be estimated as the slope of the linear evolution of
with
—but this requires a process with stationary increments [
20], so
, as can be seen in the second line of
Figure 1 where it only works for the fBm. For processes with
, the slope of the linear evolution of
with
saturates at the value 1, and successive time-derivation are then required to measure the (non-integer part of the) Hurst exponent. On the contrary, the index can be estimated on any process, and the comparison with the special value
always holds, albeit eventually following the iterative recipe above. Because the presence of a dissipative range changes the slope of
with
, whereas it does not appear to change the slope of
, it suggests that the index is a better tool to probe the non-stationarity.
The index is closely related to both the ersatz entropy rate [
20] and the Kullback–Leibler divergence [
23]. Just like these two quantities, the index offers a novel perspective on fluid turbulence or on any stochastic process by providing a new insight on its regularity and stationarity properties, as a function of the scale. Future work is required to fully understand how these three information theoretical quantities quantitatively relate in the time-averaged framework for non-stationary processes.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}