Matrix Information Geometry for Spectral-Based SPD Matrix Signal Detection with Dimensionality Reduction



Abstract
1. Introduction
2. Constructing Region Covariance Matrix on SPD Manifold
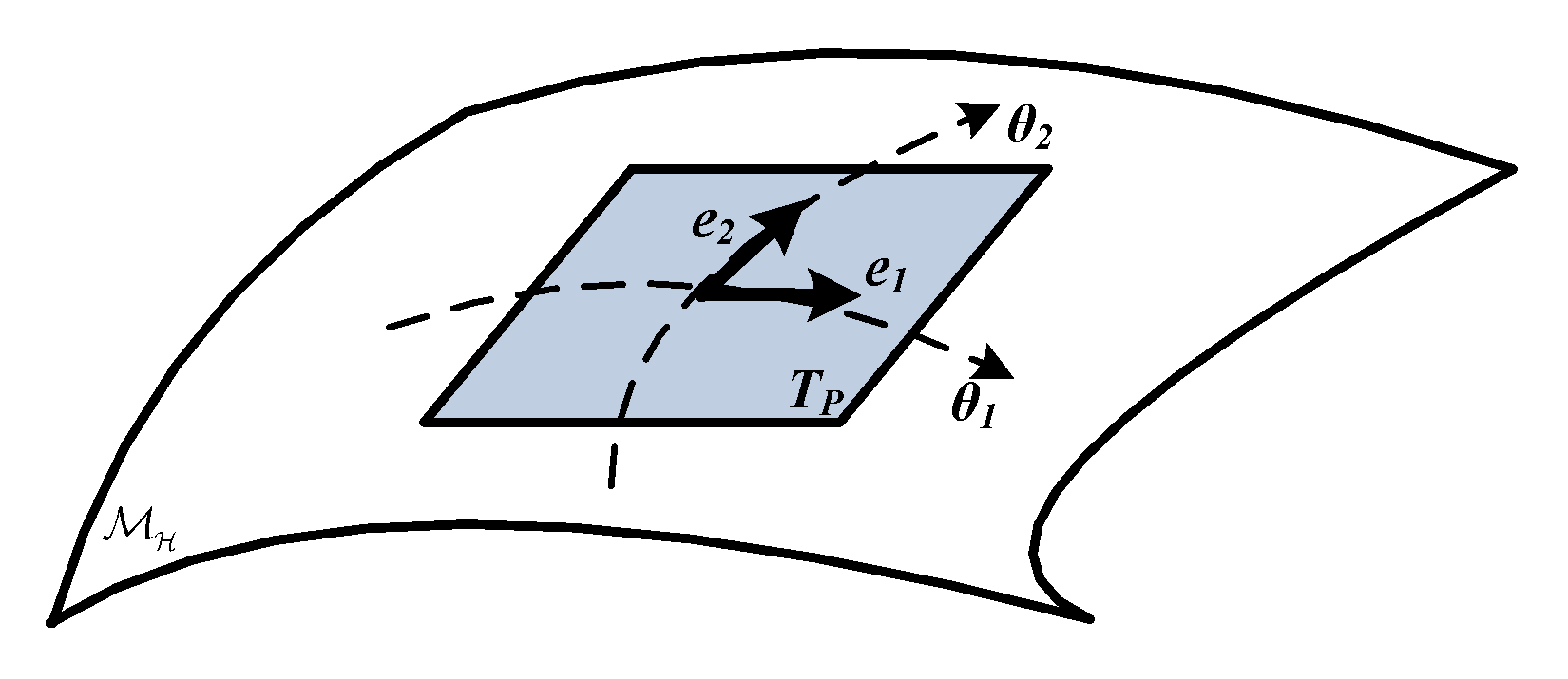
2.1. The Symmetric Positive Definite (SPD) Manifold
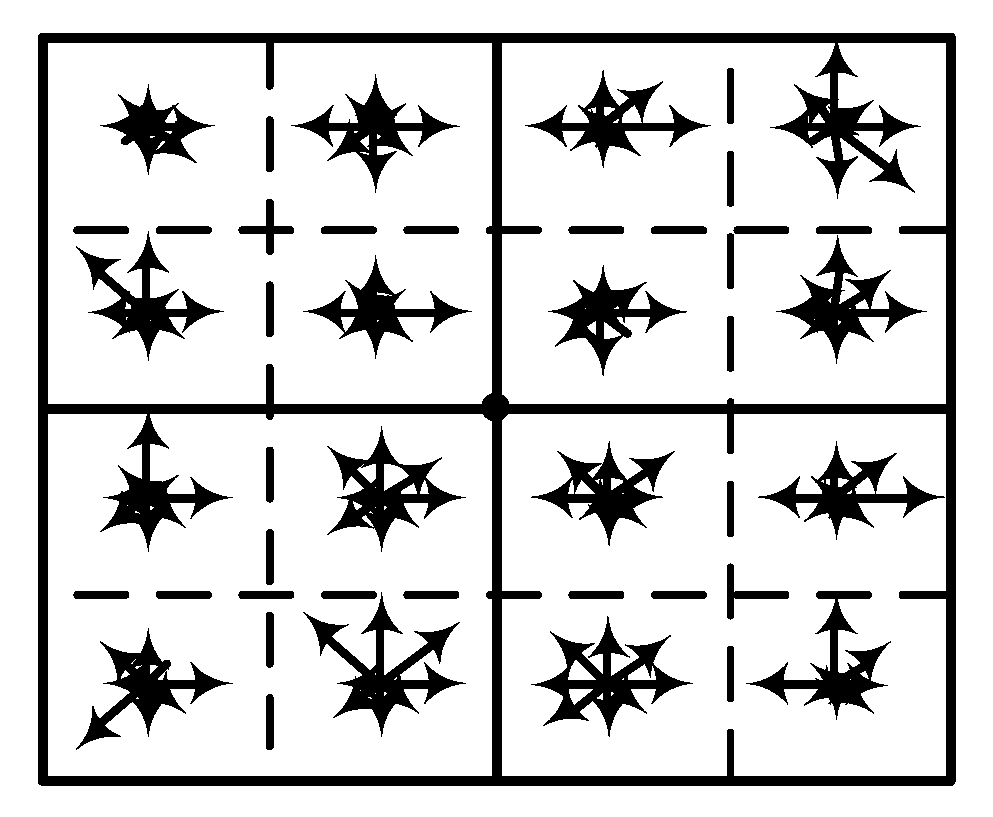
2.2. The Region Covariance Matrix Based on Dense SIFT Descriptor
3. Matrix Informantion Geometric Dimensionality Reduction Technique
3.1. Affinity Graph Embedding
3.2. Cost Function
4. Experimental Results
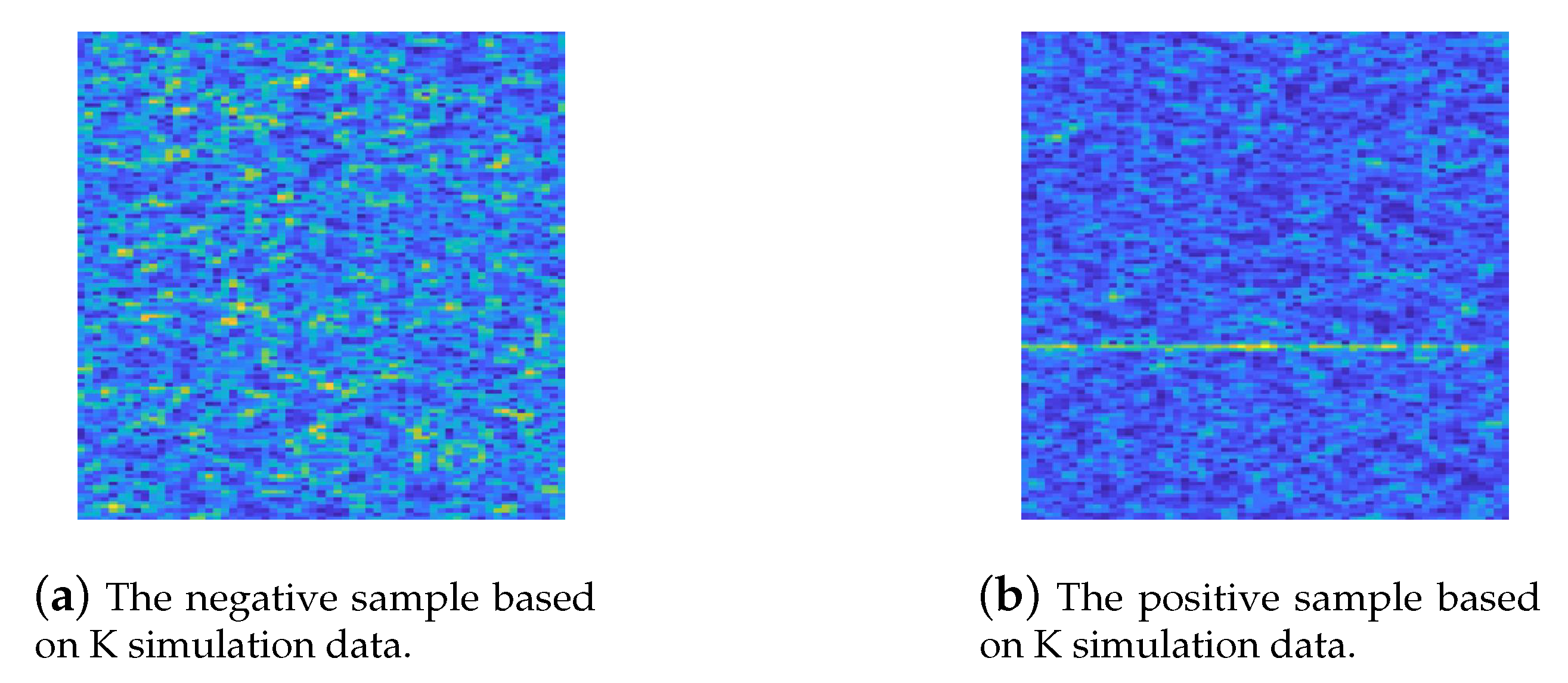
4.1. Simulation Data Experiment
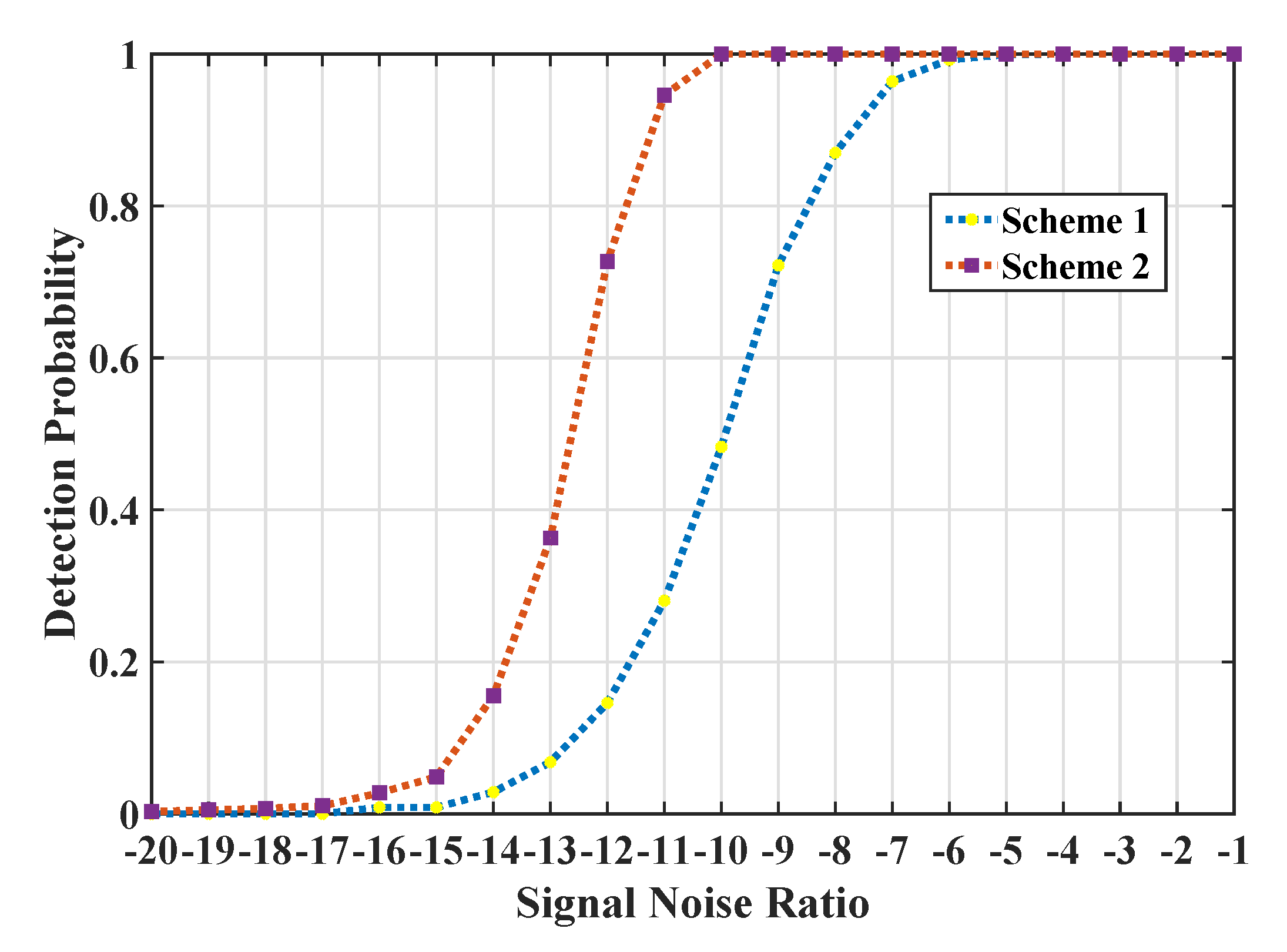
4.1.1. Detection Performance for Various Objective Dimension
4.1.2. Parameter Sensitivity Experiment on K
4.2. Semi-Simulation Data Experiment
4.2.1. Detection Performance for Various Objective Dimension
4.2.2. Parameter Sensitivity Experiment on K
5. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Poor, H.V. An Introduction to Signal Detection and Estimation; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Seu, R.; Phillips, R.J.; Biccari, D.; Orosei, R.; Masdea, A.; Picardi, G.; Safaeinili, A.; Campbell, B.A.; Plaut, J.J.; Marinangeli, L. SHARAD sounding radar on the Mars Reconnaissance Orbiter. J. Geophys. Res. Planets 2007, 112, E05S05. [Google Scholar] [CrossRef]
- Blum, R.S. Necessary conditions for optimum distributed sensor detectors under the Neyman-Pearson criterion. IEEE Trans. Inform. Theory 1996, 42, 990–994. [Google Scholar] [CrossRef]
- Kassam, S.A. Signal Detection in Non-Gaussian Noise; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Schinkel, S.; Dimigen, O.; Marwan, N. Selection of recurrence threshold for signal detection. Eur. Phys. J. Spec. Top. 2008, 164, 45–53. [Google Scholar] [CrossRef]
- Thayaparan, T.; Stankovic, L.; Amin, M.; Chen, V.; Cohen, L.; Boashash, B. Time-frequency approach to radar detection, imaging, and classification. IET Signal Process. 2010, 4, 325–328. [Google Scholar] [CrossRef]
- Boashash, B. Time-Frequency Signal Analysis and Processing: A Comprehensive Reference; Academic Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Portnoff, M. Time-frequency representation of digital signals and systems based on short-time Fourier analysis. IEEE Trans. Acoust. Speech Signal Process. 1980, 28, 55–69. [Google Scholar] [CrossRef]
- Luo, S.E.; Luo, L.Y. Adaptive detection of an unknown FH signal based on image features. In Proceedings of the 2009 5th International Conference on Wireless Communications, Networking and Mobile Computing, Beijing, China, 24–26 September 2009; pp. 1–4. [Google Scholar]
- Lampert, T.A.; O’Keefe, S.E. A survey of spectrogram track detection algorithms. Appl. Acoust. 2010, 71, 87–100. [Google Scholar] [CrossRef]
- Gillespie, D. Detection and classification of right whale calls using an ’edge’ detector operating on a smoothed spectrogram. Can. Acoust. 2004, 32, 39–47. [Google Scholar]
- Yin, M.; Guo, Y.; Gao, J.; He, Z.; Xie, S. Kernel sparse subspace clustering on symmetric positive definite manifolds. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 5157–5164. [Google Scholar]
- Huang, Z.; Wang, R.; Shan, S.; Li, X.; Chen, X. Log-Euclidean metric learning on symmetric positive definite manifold with application to image set classification. In Proceedings of the International Conference on Machine Learning, Lille, France, 6–11 July 2015; pp. 720–729. [Google Scholar]
- Hua, X.; Fan, H.; Cheng, Y.; Wang, H.; Qin, Y. Information Geometry for Radar Target Detection with Total Jensen–Bregman Divergence. Entropy 2018, 20, 256. [Google Scholar] [CrossRef]
- Hua, X.; Cheng, Y.; Wang, H.; Qin, Y.; Li, Y.; Zhang, W. Matrix CFAR detectors based on symmetrized Kullback–Leibler and total Kullback–Leibler divergences. Dig. Signal Process. 2017, 69, 106–116. [Google Scholar] [CrossRef]
- Huang, Z.; Van Gool, L. A riemannian network for spd matrix learning. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017. [Google Scholar]
- Feng, S.; Hua, X.; Wang, Y.; Lan, Q.; Zhu, X. Matrix Information Geometry for Signal Detection via Hybrid MPI/OpenMP. Entropy 2019, 21, 1184. [Google Scholar] [CrossRef]
- Abdi, H.; Williams, L.J. Principal component analysis. Wiley Interdiscip. Rev. Comput. Stat. 2010, 2, 433–459. [Google Scholar] [CrossRef]
- Balakrishnama, S.; Ganapathiraju, A. Linear discriminant analysis-a brief tutorial. Inst. Signal Inf. Process. 1998, 18, 1–8. [Google Scholar]
- Fletcher, P.T.; Lu, C.; Pizer, S.M.; Joshi, S. Principal geodesic analysis for the study of nonlinear statistics of shape. IEEE Trans. Med. Imaging 2004, 23, 995–1005. [Google Scholar] [CrossRef] [PubMed]
- Jayasumana, S.; Hartley, R.; Salzmann, M.; Li, H.; Harandi, M. Kernel Methods on Riemannian Manifolds with Gaussian RBF Kernels. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 2464–2477. [Google Scholar] [CrossRef] [PubMed]
- Harandi, M.; Salzmann, M.; Hartley, R. Dimensionality Reduction on SPD Manifolds: The Emergence of Geometry-Aware Methods. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 48–62. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Li, P.; Zuo, W.; Zhang, L. RAID-G: Robust Estimation of Approximate Infinite Dimensional Gaussian With Application to Material Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Pennec, X.; Fillard, P.; Ayache, N. A Riemannian Framework for Tensor Computing. Int. J. Comput. Vis. 2006, 66, 41–66. [Google Scholar] [CrossRef]
- Gu, Q.; Zhou, J. A Similarity Measure under Log-Euclidean Metric for Stereo Matching. In Proceedings of the 19th International Conference on Pattern Recognition (ICPR 2008), Tampa, FL, USA, 8–11 December 2008. [Google Scholar]
- Arsigny, V.; Fillard, P.; Pennec, X.; Ayache, N. Geometric Means in a Novel Vector Space Structure on Symmetric Positive-Definite Matrices. SIAM J. Matrix Anal. Appl. 2006, 29, 328–347. [Google Scholar] [CrossRef]
- Tou, J.Y.; Tay, Y.H.; Lau, P.Y. Gabor filters as feature images for covariance matrix on texture classification problem. In Lecture Notes in Computer Science, Proceedings of the International Conference on Neural Information Processing, Auckland, New Zealand, 25–28 November 2008; Springer: Berlin/Heidelberg, Germany, 2008; pp. 745–751. [Google Scholar]
- Zhang, Y.; Li, S. Gabor-LBP based region covariance descriptor for person re-identification. In Proceedings of the 2011 Sixth International Conference on Image and Graphics, Hefei, China, 12–15 August 2011; pp. 368–371. [Google Scholar]
- Hussein, M.E.; Torki, M.; Gowayyed, M.A.; El-Saban, M. Human action recognition using a temporal hierarchy of covariance descriptors on 3d joint locations. In Proceedings of the Twenty-Third International Joint Conference on Artificial Intelligence, Beijing, China, 3–9 August 2013. [Google Scholar]
- Porikli, F.; Tuzel, O.; Meer, P. Covariance tracking using model update based on lie algebra. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; Volume 1, pp. 728–735. [Google Scholar]
- Mortensen, E.N.; Deng, H.; Shapiro, L. A SIFT descriptor with global context. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 1, pp. 184–190. [Google Scholar]
- Huang, Z.; Wang, R.; Shan, S.; Chen, X. Projection Metric Learning on Grassmann Manifold with Application to Video based Face Recognition. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 140–149. [Google Scholar]
- Bakker, R.; Currie, B.; Haykin, S. The McMaster IPIX Radar Sea Clutter Database. 1998. Available online: http://soma.mcmaster.ca/ipix/ (accessed on 15 February 2020).
- Tuzel, O.; Porikli, F.; Meer, P. Region covariance: A fast descriptor for detection and classification. In Lecture Notes in Computer Science, Proceedings of the European Conference on Computer Vision, Graz, Austria, 7–13 May 2006; Springer: Berlin/Heidelberg, Germany, 2006; pp. 589–600. [Google Scholar]
- Feng, S.; Hua, X.; Wang, J.; Zhu, X. A signal detection method based on matrix information geometric dimensionality reduction. J. Phy. Conf. Ser. 2020, 1544, 012129. [Google Scholar] [CrossRef]
- Wu, J.X.; Kucheryavskiy, S.V.; Jensen, L.G.; Rades, T.; Müllertz, A.; Rantanen, J. Image Analytical Approach for Needle-Shaped Crystal Counting and Length Estimation. Cryst. Growth Des. 2015, 15, 4876–4885. [Google Scholar] [CrossRef]
- Witschi, M.; Schild, J.; Nyffenegger, B.; Stoller, C.; Dellsperger, F. Detection of Modern Communication Signals Using Frequency Domain Morphological Filtering. In Proceedings of the 24th European Signal Processing Conference (EUSIPCO), Budapest, Hungary, 29 August–2 September 2016. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| dim = 20 = 0.004 | dim = 40 = 0.001 | dim = 60 = 0.0035 | dim = 80 = 0.0085 | dim = 100 = 0.0205 | dim = 120 = 0.02 | |
|---|---|---|---|---|---|---|
| SNR = −1 | 1 | 1 | 1 | 1 | 1 | 1 |
| SNR = −5 | 1 | 1 | 1 | 1 | 1 | 1 |
| SNR = −10 | 1 | 1 | 1 | 0.9975 | 1 | 1 |
| SNR = −15 | 0.0925 | 0.0485 | 0.1035 | 0.0085 | 0.1975 | 0.1895 |
| SNR = −20 | 0.0105 | 0.003 | 0.011 | 0.0085 | 0.0375 | 0.0355 |
| K | 100 | 1100 | 2100 | 3100 | 4100 | 5100 |
|---|---|---|---|---|---|---|
| 0.016 | 0.012 | 0.0085 | 0.0055 | 0.0015 | 0 | |
| 0.9885 | 0.8875 | 0.8755 | 0.8475 | 0.752 | 0.4465 |
| dim = 20 = 0.0015 | dim = 40 = 0.002 | dim = 60 = 0.0045 | dim = 80 = 0.0035 | dim = 100 = 0.003 | dim = 120 = 0.0045 | |
|---|---|---|---|---|---|---|
| SNR = 5 | 0.989 | 0.9785 | 0.9715 | 0.9645 | 0.9635 | 0.9575 |
| SNR = 0 | 0.9795 | 0.97 | 0.9475 | 0.9415 | 0.9345 | 0.921 |
| SNR = −5 | 0.561 | 0.575 | 0.5775 | 0.526 | 0.528 | 0.51 |
| SNR = −10 | 0.073 | 0.0765 | 0.099 | 0.096 | 0.102 | 0.1075 |
| K | 1 | 100 | 1100 | 2100 | 3100 | 4100 | 5100 |
|---|---|---|---|---|---|---|---|
| 0.015 | 0.0185 | 0.086 | 0.1715 | 0.253 | 0.3075 | 0.4265 | |
| 0.561 | 0.5985 | 0.923 | 0.99 | 1 | 1 | 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, S.; Hua, X.; Zhu, X. Matrix Information Geometry for Spectral-Based SPD Matrix Signal Detection with Dimensionality Reduction. Entropy 2020, 22, 914. https://doi.org/10.3390/e22090914
Feng S, Hua X, Zhu X. Matrix Information Geometry for Spectral-Based SPD Matrix Signal Detection with Dimensionality Reduction. Entropy. 2020; 22(9):914. https://doi.org/10.3390/e22090914
Chicago/Turabian StyleFeng, Sheng, Xiaoqiang Hua, and Xiaoqian Zhu. 2020. "Matrix Information Geometry for Spectral-Based SPD Matrix Signal Detection with Dimensionality Reduction" Entropy 22, no. 9: 914. https://doi.org/10.3390/e22090914
APA StyleFeng, S., Hua, X., & Zhu, X. (2020). Matrix Information Geometry for Spectral-Based SPD Matrix Signal Detection with Dimensionality Reduction. Entropy, 22(9), 914. https://doi.org/10.3390/e22090914