Global Geometry of Bayesian Statistics

Department of Mathematics, Osaka Dental University, Osaka 573-1121, Japan
Entropy 2020, 22(2), 240; https://doi.org/10.3390/e22020240
Submission received: 15 January 2020
/
Revised: 18 February 2020
/
Accepted: 18 February 2020
/
Published: 20 February 2020
(This article belongs to the Special Issue Information Geometry III)
Abstract
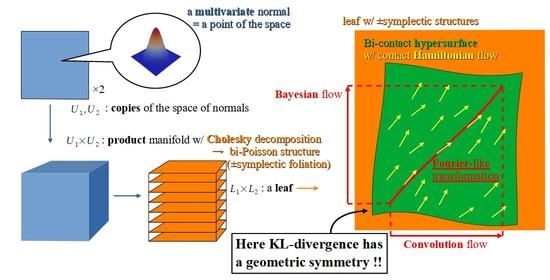
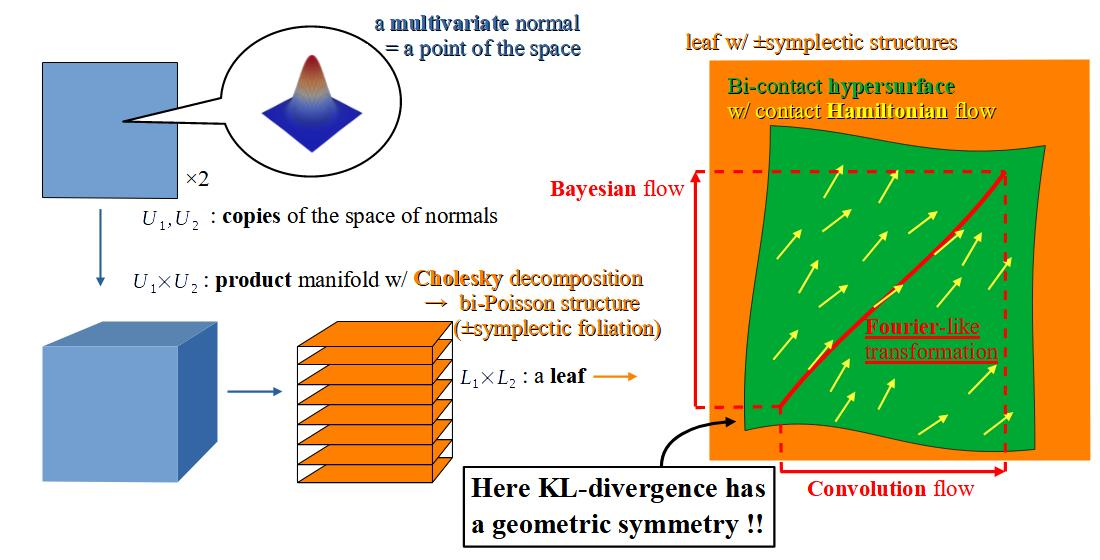
In the previous work of the author, a non-trivial symmetry of the relative entropy in the information geometry of normal distributions was discovered. The same symmetry also appears in the symplectic/contact geometry of Hilbert modular cusps. Further, it was observed that a contact Hamiltonian flow presents a certain Bayesian inference on normal distributions. In this paper, we describe Bayesian statistics and the information geometry in the language of current geometry in order to spread our interest in statistics through general geometers and topologists. Then, we foliate the space of multivariate normal distributions by symplectic leaves to generalize the above result of the author. This foliation arises from the Cholesky decomposition of the covariance matrices.
{kind=link}
{kind=link}
1. Introduction
Suppose that a smooth manifold U is embedded in the space of positive probability densities defined on a fixed domain. Then, the relative entropy defines a separating premetric on U. Here a premetric on U is a non-negative function on vanishing along the diagonal set , and it is separating if it vanishes only at . Its jet of order 3 at induces a family of differential geometric structures on U, which is the main subject of the information geometry. There is a large body of literature on the information geometry (see [1,2] and references therein). It is worth noting that another “canonical” choice of premetric other than the above D is discussed in [3].
In the case where U is the space of univariate normal distributions, the half plane presents U, where m denotes the mean and s the standard deviation. Since the convolution of two normal densities is a normal density, it induces a product ∗ on called the convolution product. On the other hand, since the pointwise product of two normal densities is proportional to a normal density, it induces another product · on called the Bayesian product. Their expressions are
In the previous work of the author ([4]), a Fourier-like transformation is defined as the diffeomorphism sending to . It is an involution interchanging the two operations ∗ and ·. Accordingly, the stereograph of the above D is defined by
The flow () preserves f as well as the graph of . The same symmetry appears in the contact/symplectic geometry related to the algebraic geometry of Hilbert modular cusps. Moreover, there exists a contact Hamiltonian flow whose restriction to the graph F presents a certain Bayesian inference. Its application appears in [5].
In this paper, we describe Bayesian statistics in the language of current geometry in order to share the problems among general geometers and topologists. Then, generalizing the above result of the author, we foliate the space of multivariate normal distributions by using the Cholesky decomposition of the covariance matrices and define on each leaf the Fourier-like transformation, the stereograph of the relative entropy, and the contact Hamiltonian flow presenting a Bayesian inference. The ultimate aim of this research is to construct a Bayesian statistical model of space-time on which everything learns by changing its inner distribution along the leaf.
2. Results
2.1. Symplectic/Contact Geometry
Current geometry does not heavily use tensor calculus. Instead, it uses (exterior) differential forms, which can be integrated along cycles, pulled-back under smooth maps, and differentiated without affine connections. In symplectic/contact geometry, the readers must be familiar with differential forms. Then, this subsection is the minimal summary of definitions. For the details, refer to [6].
A (positive) symplectic form on an oriented -manifold is a closed 2-form satisfying , where . If the orientation is reversed, the 2-form becomes a negative symplectic form. In either case, a symplectic form identifies a vector field X with an exact 1-form through the one-to-one correspondence defined by Hamilton’s equation . Here denotes the interior product. Then, X is called a Hamiltonian vector field of the primitive function H (+constant). The flow generated by X preserves the symplectic form . Namely, the Lie derivative vanishes. A Lagrangian submanifold is an n-manifold which is immersed in a symplectic -manifold so that the pull-back of the symplectic form vanishes. The word “symplectic” is a calque of “complex”. Indeed, there exists an almost complex structure J which is compatible with a given symplectic structure, i.e., for which the composition is a Riemannian metric. In the case where J is integrable, is called a Kähler form of the complex manifold.
On the other hand, a (positive) contact form on an oriented -manifold N is a 1-form satisfying . A (co-oriented) contact structure on N is the conformal class of a contact form. It can be presented as the oriented hyperplane field . The product manifold carries the exact symplectic form . Take a function h on N. Let X be the Hamiltonian vector field of the function defined on the product manifold . Then, the push-forward Y of X under the projection of to the second factor is well-defined. The vector field Y is called the contact Hamiltonian vector field of the function h on N. The pair of the equations and uniquely determines Y. A Legendrian submanifold is an -manifold which is immersed in a contact -manifold so that the pull-back of the contact form vanishes.
2.2. Bayesian Statistics
Suppose that any point y of a smooth manifold M equipped with a volume form presents a positive probability density or probability defined on a (possibly discrete) measurable space W, where depends smoothly on y, and for . Let be the space of positive volume forms with finite total volume on M. Take an arbitrary element and consider it as the initial state of the mind M of an agent. Here W stands for (a part of) the world for the agent. Finding a datum in his world, the agent can take the value as a smooth positive function on M, which is called the likelihood of the datum w. Then, he can multiply the volume form V by to obtain a new element of . This defines the updating map
The “psychological” probability density on the mind M defined by is accordingly updated into the density , which is called the conditional probability density given the datum w. Practically, Bayes’ rule on conditional probabilities is expressed as
Here P denotes the probability of an event, (respectively, ) a small portion of M (respectively, W). Since the state of the world does not depend on the mind of the agent, the probability is independent of y, and therefore approximates a constant on M. On the other hand, the conditional probability of the datum w approximates a function of y which is clearly proportional to the above likelihood. This implies that the factor in the right-hand side of Bayes’ rule (Equation (4)) is approximately proportional to the likelihood. Thus, Bayes’ rule (Equation (4)) implies the updating of via the formula (Equation (3)). The Bayesian product · mentioned in the introduction appears in this context. Namely, the variable of the first factor is the mean y of a normal distribution on W. The density of the normal distribution at the datum w can be considered as a function of y, which is proportional to a normal distribution on M. Thus the Bayesian product of normal distributions on M presents the updating of the density of the predictive mean in the mind of the agent.
The aim of Bayesian updating is practical to many people. Indeed, the aim of the above updating is the estimation of the mean. Nevertheless, it is quite natural that a geometer multiplies a volume form by a positive function once he is given them. In this regard, we can say that the aim of Bayesian updating is a geometric setting of a dynamical system. In particular, a Bayesian updating in the conjugate prior is at first, simply the iteration of a Bayesian product.
2.3. The Information Geometry
Suppose that a manifold U is embedded in the subset . Hereafter, we identify the element with the “psychological” probability density . We call U a conjugate prior for the updating map if the cone satisfies . (Whether there exists a preferred conjugate prior or not, how to determine the initial state of the mind is another interesting problem. For example, one may fix the asymptotic behavior of the state of mind according to the aim of the Bayesian inference and search for the optimal decision of the initial state. See [7] for an approach to this problem via the information geometry.)
Now we define the “distance” on , which satisfies none of the axioms of distance, by
From the convexity of , we see that the restriction is a separating premetric on U, which is called the Kullback–Leibler divergence in information theory. This implies that the germ of D along the diagonal set of represents the zero section of the cotangent sheaf of U, that is, for any point of any chart of U, the Taylor expansion of has no linear terms. Thus the differential also vanishes on the diagonal set of . We regard the 1-form on represented by the germ of along as a quadratic tensor, and denote it by g (note that is linear). It appears as two times the quadratic terms () in the above Taylor expansion. Of course, it also appears in the Taylor expansion of . Thus it can also be considered as the quadratic terms of the symmetric sum . The symmetric matrix is called the Fisher information in information theory. From the non-negativity of D, we may assume generically that g is a Riemannian metric. We would like to notice that this construction of Riemannian metric by means of symmetric sum also works over . Indeed, we have
Let be the Levi–Civita connection of g. We write the lowest degree terms in the Taylor expansions of as (). This presents the symmetric cubic tensor T, which can be constructed from the anti-symmetric difference similarly as above. One can use it to deform the Levi–Civita connection into the -connections () without torsion, where denotes the dual metric. Especially, we call and respectively the e-connection and the m-connection. The symmetric tensor T is sometimes called skewness since it presents the asymmetry of D. The information geometry concerns the family of -connections as well as the Fisher information metric on U. We usually do not extend it over for the symmetric sum of lacks asymmetry.
2.4. The Geometry of Normal Distributions
We consider the space U of multivariate normal distributions on . A vector and an upper triangular matrix with positive diagonal entries parameterize U by declaring that presents the mean and the Cholesky decomposition of the covariance matrix. Further we put
The matrix is unitriangular, i.e., a triangular matrix whose diagonal entries are all 1. Then, each point presents the volume form
Let denote the sum of the squares of the entries of a matrix as well as a vector. The relative entropy defines the premetric by
Let denote the unit matrix, and the difference . We have
Let be the entries of the inverse matrix of . We have
Put
Then, the representing matrix of g is the following block diagonal matrix:
Lowering the upper indices of the -connection with , we have
With respect to the same coordinates, the coefficients of the e-connection are
Those of the m-connection are
There is a particular system of coordinates for describing the e-connection. Namely, all the coefficients vanish with respect to the natural parameter , where is the upper half of . On the other hand, all the coefficients for the m-connection vanish with respect to the expectation parameter , where is the upper half of .
2.5. The Generalization
This subsection is devoted to the generalization of the result of the author, which is mentioned in the introduction, to the above multivariate setting. We fix the third component r of the coordinate system , and change the presentation of the others. Namely, we take the natural projection and replace the coordinates on the fiber by appearing in the next proposition. The generalization is then straightforward.
Proposition 1.
The fiber is an affine subspace of U with respect to the e-connection . It can be parameterized by affine parameters and , where and .
Proof.
The natural parameters and are affine provided that are constant, and and are affine. □
Note that is identically zero on some/any fiber if and only if . The fiber satisfies the following two properties.
Proposition 2.
is closed under the convolution ∗ and the Bayesian product ·, and thus inherits them.
Proof.
The covariance of the density at is
This coincides with that of the density at . Thus is closed under ∗, and inherits it as
Put and . The density at is proportional to . From this we see that implies , and . Thus is closed under ·, and inherits it as . □
Proposition 3.
The fiber with the induced metric from g admits a Kähler complex structure.
Proof.
The restriction of g is . We define the complex structure by (). Then, the 2-form satisfies . □
We write the restriction of the premetric D using the coordinates as follows, where we omit r for the expression does not depend on r.
We take the product of two copies of U. Then, the products of the fibers foliate . We call this the primary foliation of . For each , we have the coordinate system on the leaf . From the Kähler forms and respectively on and , we define the symplectic forms on , which induce the mutually opposite orientations in the case where n is odd. Hereafter, we consider the pair of regular Poisson structures defined by these symplectic structures on the primary foliation, and fix the primitive 1-forms . The corresponding pair of Poisson bi-vectors is defined on . We take the -dimensional submanifolds of the leaf for and . The secondary foliation of foliates any leaf by the -dimensional submanifolds for . The tertiary foliation of foliates all leaves of the secondary foliation by the -dimensional submanifolds for .
Proposition 4.
With respect to the Kähler form , the tertiary leaves are Lagrangian correspondences.
Proof.
The tangent space is generated by and . We have and . Thus are Lagrangian submanifolds of . □
The restrictions of to the hypersurface are contact forms. Let denote them.
Proposition 5.
For any ε and δ with , the submanifold is a disjoint union of n-dimensional submanifolds which are integral submanifolds of the hyper plane field on N.
Proof.
We have . □
For each point , we have the diffeomorphism sending to with . We put and
Then, we have . For any , we define the diffeomorphism which preserves the 1-forms . It is easy to prove the following proposition.
Proposition 6.
In the case where for , the diffeomorphism preserves .
For each , we take the set , and consider it as a structure of the secondary leaf .
Proposition 7.
For any , the diffeomorphism preserves the set for any . In the case where ζ satisfies , the diffeomorphism also preserves the hypersurface N.
Proof.
maps to , and holds. Further implies provided that . □
For any , the diffeomorphism interchanges the operation with the operation .
Proposition 8.
If , then
Proof.
Putting we have and , hence the first equation. The second equation is similarly proved. □
A curve is a geodesic with respect to the e-connection if and only if and are affine functions of t for .
Definition 1.
We say that an e-geodesic is intensive if it admits an affine parameterization such that are linear for .
Note that any e-geodesic is intensive in the case where .
Proposition 9.
Given an intensive e-geodesic , we can change the parameterization of its image under the diffeomorphism to obtain an intensive e-geodesic.
Proof.
Put and . We have and . They are respectively an affine function and a linear function of . □
We have the hypersurface which carries the contact forms . This is defined on any leaf of the primary foliation of . Now we state the main result.
Theorem 1.
The contact Hamiltonian vector field Y of the restriction of the function to N for the contact form coincides with that for the other contact form . It is tangent to the tertiary leaves and defines flows on them. Here each flow line presents the correspondence between intensive e-geodesics in Proposition 9.
Corollary 1.
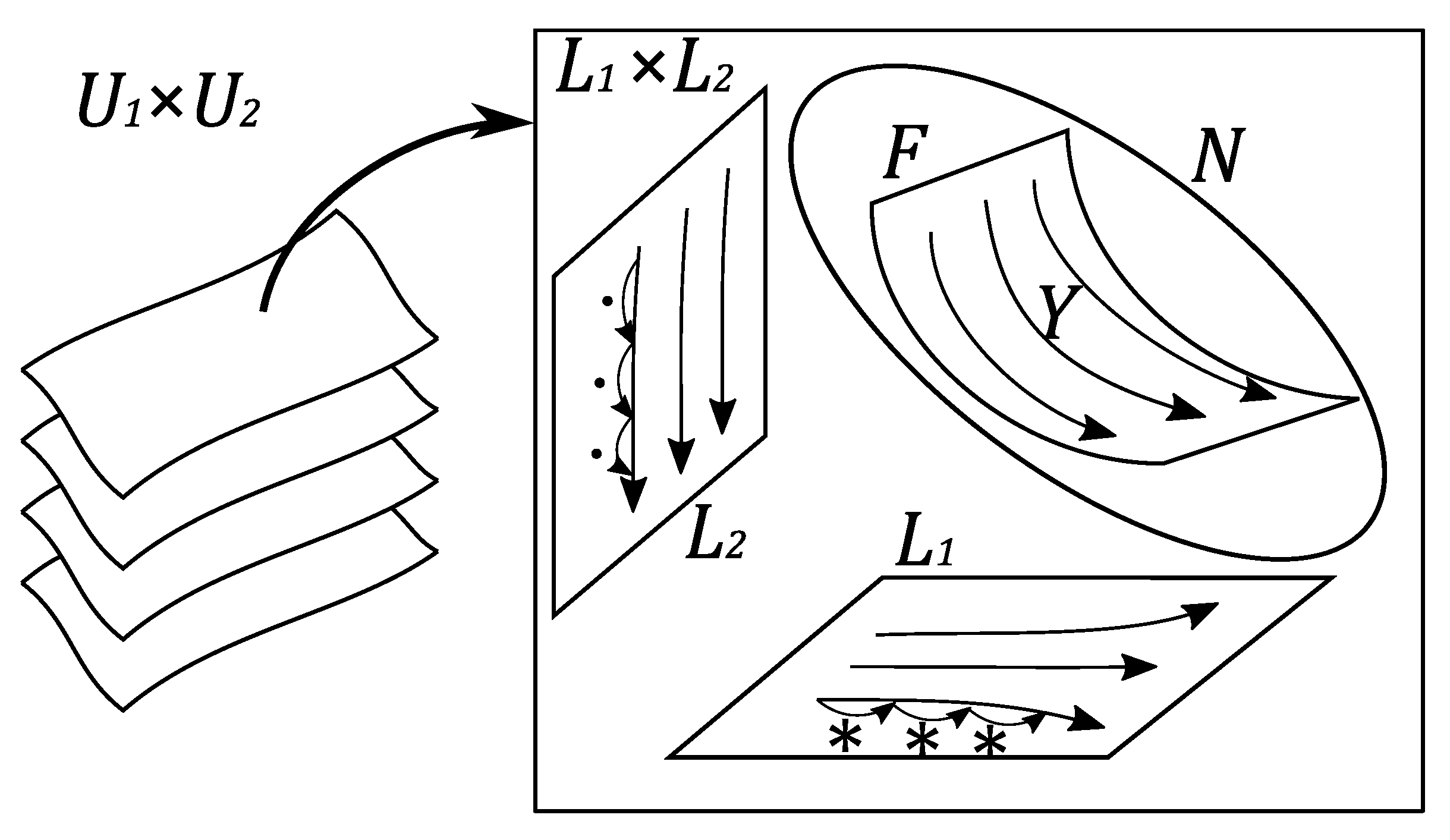
For any , the flow on the leaf presents the iteration of the operation ∗ on the first factor of and that of the operation · on the second factor as is described in Proposition 8 (see Figure 1).
From Corollary 1, we see that the flow model of Bayesian inference studied in [4,5] also works for the multivariate case. We prove the theorem.
Proof.
Take the vector field on . It satisfies , , and , and thus its restriction to N is the contact Hamiltonian vector field Y. It also satisfies (), where the right-hand sides vanish along . Given a point , we have the integral curve of Y with initial point . We can change the parameter of the curve on the first factor with to obtain an intensive e-geodesic. □
2.6. The Symmetry
The diffeomorphism with in Proposition 7 also appears in the standard construction of Hilbert modular cusps in [8]. We sketch the construction.
Since the function is linear in the logarithmic space , we can take points () so that the quotient of the primary leaf under the -action generated by , ..., is the total space of a vector bundle over . Here is the quotient of under the -lattice generated by the above points, and the fiber consists of the vectors .
In the univariate case (), on the logarithmic -plane, we can take any point of the line other than the origin. That is, we put and (). Then, the map sends to . The -action generated by it rolls up the level sets of H, so that the quotient of the logarithmic -plane becomes the cylinder , which is the base space. On the other hand, the -plane, which is the fiber, expands horizontally and contracts vertically. This is the inverse monodromy along . In general, we obtain a similar -bundle over if we take the points of in general position.
From Proposition 7, we see that the leaf of the secondary foliation with the set , as well as the pair of the 1-forms with the function H, descends to the -bundle. If there exists further a -lattice on the fiber which is simultaneously preserved by the maps (), we obtain a -bundle over . Such a choice of would be number theoretical. Indeed, this is the case for Hilbert modular cusps. Moreover, we are considering the 1-forms , which descend to the -bundle. See [9] for the standard construction with special attention to these 1-forms.
We should notice that the vector field Y does not descend to the -bundle. However, every actual Bayesian inference along Y eventually stops. Thus, we may take sufficiently large and consider Y as a locally supported vector field to perform the inference in the quotient space.
3. Discussion
Finally, we would like to comment on the transverse geometry of the primary foliation. The author conjectures that it has some relation to the M-theory. See e.g., [10] for a relation between Poisson geometry and matrix theoretical or non-commutative geometrical physics.
The premetric on U can be decomposed as
The first term on the right-hand side presents the fiber premetric , where and . If (), then we have the (non-information geometrical) Pythagorean-type formula
Note that each term in this expression does not depend on . The second term on the right-hand side can be expressed as
This presents the discretized version of the following restriction of the Fisher information g:
We have the orthonormal frame with respect to this metric which consists of
This frame satisfies the relations of the unitriangular algebra, where denotes Kronecker’s delta. Using the dual coframe , the relations can be expressed as
The transverse section of the primary foliation of is the product of two copies of the unitriangular Lie group, which we would like to call the bi-unitriangular group. We fix the frame (respectively, the coframe) of the transverse section consisting of the above (respectively, ) in the first factor and their copies (respectively, ) in the second factor . The quotient manifold of the bi-unitriangular group by a cocompact lattice inherits a Riemannian metric from the sum of Fisher informations, and carries the following global -plectic structure (, ):
We notice that, in the symplectic case where , the quotient manifold admits no Kähler structure (see [11]). However, it is still remarkable that the transverse symplectic 6-manifold is naturally ignored in the Bayesian inference described in this paper. Conjecturally, a similar model would help us to treat events in parallel worlds (or blanes) in the same “psychological” procedure.
Funding
This research received no external funding.
Conflicts of Interest
The author declares no conflict of interest.
References
- Amari, S. Information Geometry and Its Applications; Springer: Tokyo, Japan, 2016. [Google Scholar]
- Ay, N.; Jost, J.; Le, H.V.; Schwachhöfer, L. Information Geometry; Springer: Gewerbesrasse, Switzerland, 2017. [Google Scholar]
- Felice, N.; Ay, N. Towards a Canonical Divergence within Information Geometry. arXiv 2018, arXiv:1806.11363. [Google Scholar]
- Mori, A. Information geometry in a global setting. Hiroshima Math. J. 2018, 48, 291–306. [Google Scholar] [CrossRef]
- Mori, A. A concurrence theorem for alpha-connections on the space of t-distributions and its application. Hokkaido Math. J. 2020, in press. [Google Scholar]
- Geiges, H. An Introduction to Contact Topology; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Snoussi, H. Bayesian information geometry: Application to prior selection on statistical manifolds. In Advances in Imaging and Electron Physics 146; Hawkes, P., Ed.; Elsevier: San Diego, CA, USA, 2007; pp. 163–207. [Google Scholar]
- Hirzebruch, F. Hilbert modular surfaces. Enseign. Math. 1973, 19, 183–281. [Google Scholar]
- Massot, P.; Niederkrüger, K.; Wendl, C. Weak and strong fillability of higher dimensional contact manifolds. Invent. Math. 2013, 192, 287–373. [Google Scholar] [CrossRef]
- Kuntner, N.; Steinacker, H. On Poisson geometries related to noncommutative emergent gravity. J. Geom. Phys. 2012, 62, 1760–1777. [Google Scholar] [CrossRef]
- Cordero, L.; Fernández, M.; Gray, A. Symplectic manifolds with no Kähler structure. Topology 1986, 25, 375–380. [Google Scholar] [CrossRef]
Figure 1.
On any leaf of the primary foliation of , there is a bi-contact hypersurface N carrying the bi-contact Hamiltonian vector field Y. Because of the dimension, the surface F in the figure presents simultaneously a leaf of the secondary foliation and a leaf of the tertiary foliation of that leaf. The flow on the tertiary leaf traces the common lift of the iteration of ∗ on and the iteration of · on .
Figure 1.
On any leaf of the primary foliation of , there is a bi-contact hypersurface N carrying the bi-contact Hamiltonian vector field Y. Because of the dimension, the surface F in the figure presents simultaneously a leaf of the secondary foliation and a leaf of the tertiary foliation of that leaf. The flow on the tertiary leaf traces the common lift of the iteration of ∗ on and the iteration of · on .

© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Mori, A. Global Geometry of Bayesian Statistics. Entropy 2020, 22, 240. https://doi.org/10.3390/e22020240
AMA Style
Mori A. Global Geometry of Bayesian Statistics. Entropy. 2020; 22(2):240. https://doi.org/10.3390/e22020240
Chicago/Turabian StyleMori, Atsuhide. 2020. "Global Geometry of Bayesian Statistics" Entropy 22, no. 2: 240. https://doi.org/10.3390/e22020240
APA StyleMori, A. (2020). Global Geometry of Bayesian Statistics. Entropy, 22(2), 240. https://doi.org/10.3390/e22020240
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.