Probabilistic Strategic Conflict-Management for 4D Trajectories in Free-Route Airspace

 ,
,  , , ,
, , ,  ,
,
Abstract
1. Introduction
2. Methods
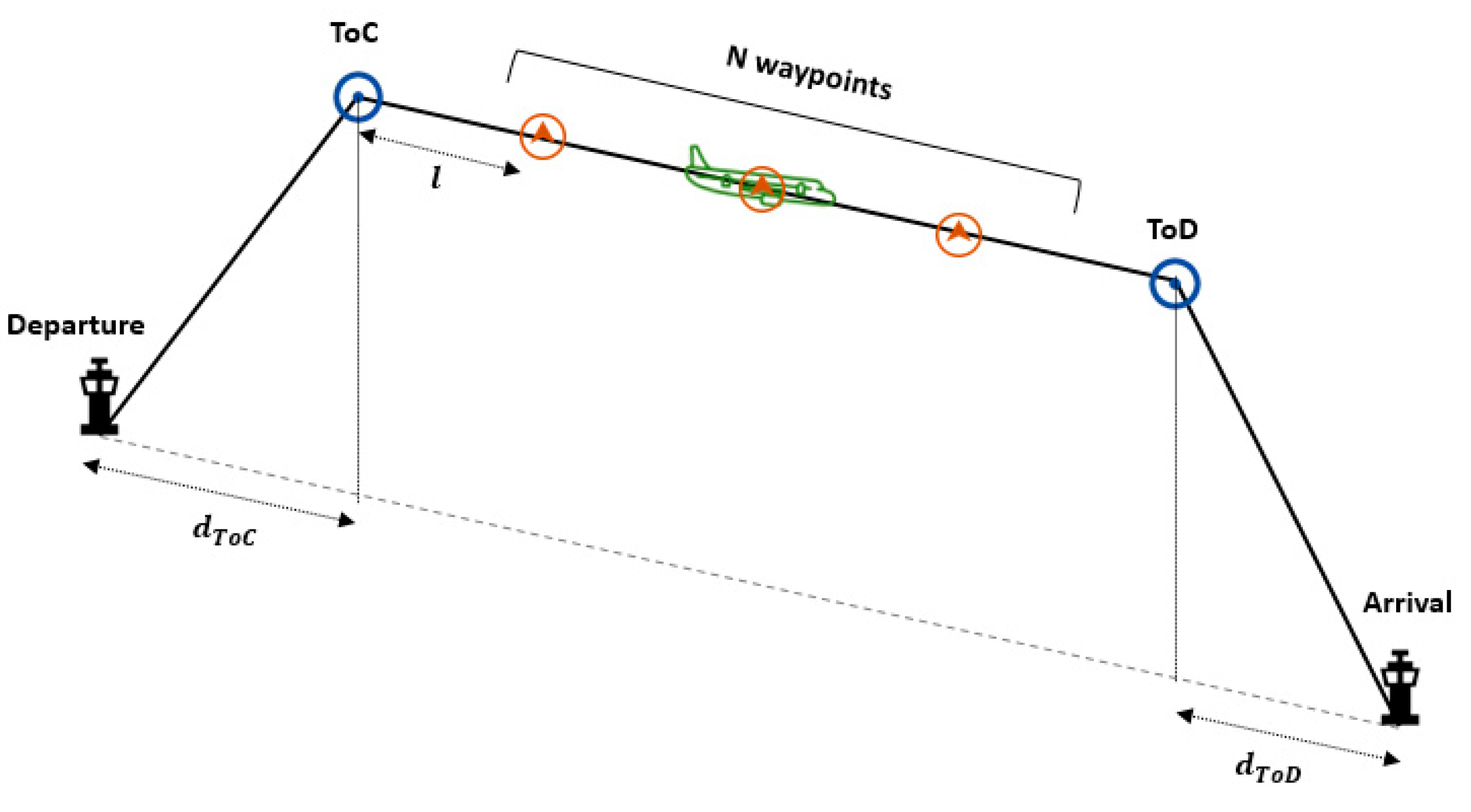
2.1. Path Modelling for Free-Route Airspace
2.2. Conflict-Detection Model
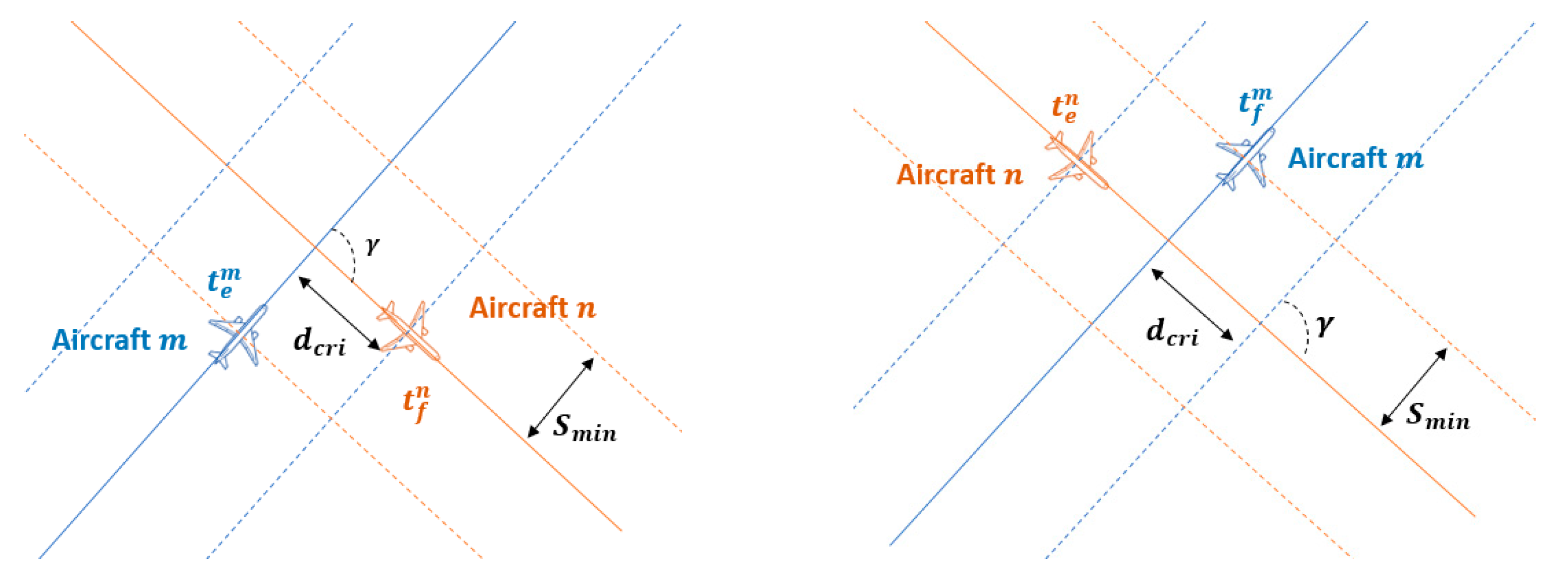
2.2.1. Critical Section
2.2.2. Temporary-Blocking Window
- The initial critical situation occurs when the aircraft is at the beginning of the critical section, and the aircraft is leaving.
- The final critical situation occurs when the aircraft is leaving the critical section, and the aircraft is entering.
3. Probabilistic Models
3.1. Uncertainty Associated With 4D Trajectories
3.2. Speed Uncertainty
3.2.1. Mode of Adjusted Speed
3.2.2. Mode of Updated Speed
3.3. Wind Uncertainty
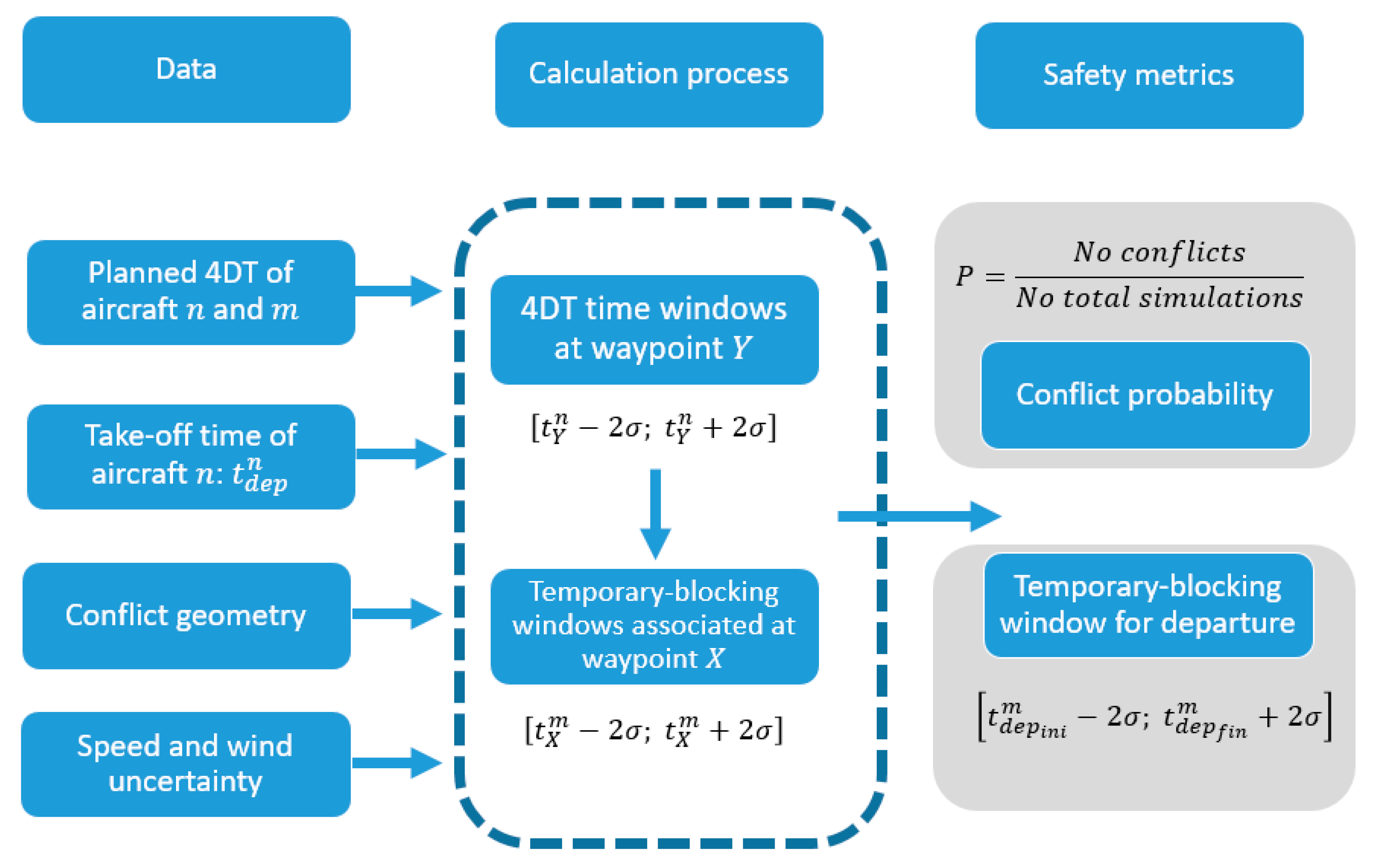
4. Probabilistic Assessment
- It is known the departing time of the aircraft () and the planned 4DT of both aircraft.
- It is calculated the 4DT time windows of the aircraft at the closest waypoint () to the intersection .
- According to the equations described in Section 2.2, the temporary-blocking window associated with aircraft at the waypoint is calculated . This temporary-blocking window is calculated for the probabilistic distribution of the aircraft based on its 4DT temporary windows.
- Once the whole temporary-blocking window at the waypoint is calculated for the aircraft , this value is extrapolated to the departing time: .
5. Results and Discussion
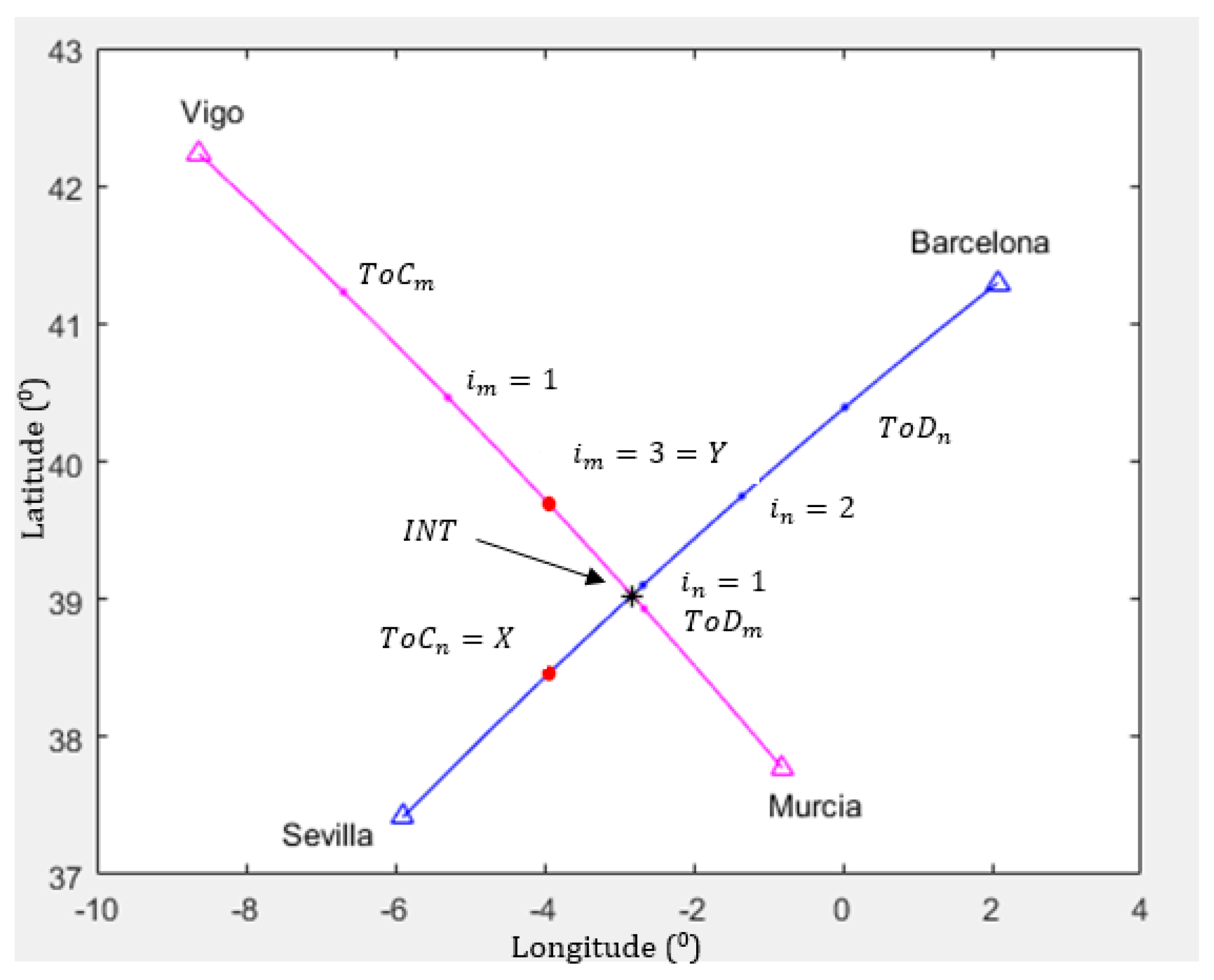
5.1. Description of Case Study
5.2. Conflict-Detection Management without Uncertainty
5.3. Probabilistic Assessment
5.3.1. 4DT Uncertainty
5.3.2. Speed Uncertainty
- The time span of the temporary-blocking window for the updated speed was 302 s, very similar to the 4DT uncertainty without speed uncertainty. Therefore, this technique increased the size of the temporary-blocking window and deteriorated the previous value of conflict-probability.
- The time span of the adjusted speed decreased to 166 s. This value was similar to the static case where no uncertainty was considered. The range of the speeds needed to correct the time windows were minor than 5%. This mode provided the most accurate results for conflict probability considering uncertainty. In this case, the pilot would adjust the speed once the aircraft reached a waypoint to ensure the time requirement of the following waypoint. The major limitation of this mode is that the aircraft had to modify its speed throughout the trajectory.
5.3.3. Wind Uncertainty
Constant Wind
- The variation of the time span increased with the wind intensity, although the increase was limited until 3.1% (9 s). Therefore, the variation of the wind intensity below 40 kts can be neglected with respect to the size of the temporary-blocking windows with 4DT.
- However, the temporal displacement of the temporary-blocking windows cannot be neglected. Those variations could generate a delay or advance for the same wind direction up to 168 s of delay (wind direction 140°) and 138 s of advancement (direction 320°). The size of the 4DT temporary-blocking windows without speed uncertainty is 283 s (Section 5.3.1), this implied that there were temporal displacements over 40%. In the case the static temporary-blocking windows were considered, the displacement could reach up to 100%.
Variable Wind
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Eurocontrol. EUROCONTROL Seven-Year Forecast February 2018. Available online: https://www.eurocontrol.int/publication/seven-year-forecast-flight-movements-and-service-units-february-2019 (accessed on 30 March 2019).
- SESAR JU. SESAR Solutions Catalogue 2019, 3rd ed. 2019. Available online: https://www.sesarju.eu/index.php/newsroom/brochures-publications/sesar-solutions-catalogue (accessed on 11 June 2019).
- SESAR Joint Undertaking. SESAR 2020 Concept of Operations. 2017. Available online: https://www.sesardeploymentmanager.eu/wp-content/uploads/2016/12/421968-SESAR-Deployment-Programme-edition-2017-Hfdst-1.pdf (accessed on 22 February 2019).
- Rodríguez-Sanz, Á.; Comendador, F.G.; Valdés, R.M.A.; Pérez-Castán, J.A.; García, P.G.; Godoy, M.N.G.N. 4D-trajectory time windows: Definition and uncertainty management. Aircr. Eng. Aerosp. Technol. 2019, 91, 761–782. [Google Scholar] [CrossRef]
- Matsuno, Y.; Tsuchiya, T. Stochastic 4D Trajectory Optimization for Aircraft Conflict Resolution. In Proceedings of the 2014 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2014. [Google Scholar]
- Margellos, K.; Lygeros, J. Toward 4-D Trajectory Management in Air Traffic Control: A Study Based on Monte Carlo Simulation and Reachability Analysis. IEEE Trans. Control Syst. Technol. 2013, 21, 1820–1833. [Google Scholar] [CrossRef]
- Casado, E.; Goodchild, C.; Vilaplana, M. Identification and Initial Characterization of Sources of Uncertainty Affecting the Performance of Future Trajectory Management Automation Systems. Presented at 2nd International Conference on Application and Theory of Automation in Command and Control Systems, London, UK, 29–31 May 2012. [Google Scholar]
- Chaimatanan, S.; Delahaye, D.; Mongeau, M. Aircraft 4D Trajectories Planning under Uncertainties. In Proceedings of the 2015 IEEE Symposium Series on Computational Intelligence (SSCI 2015), Cape Town, South Africa, 7–10 December 2015; pp. 51–58. [Google Scholar] [CrossRef]
- SESAR. SESAR Concept of Operations Step 2 Edition 2014 (Ed. 01.01.00); SESAR Joint Undertaking: Brussels, Belgium, 2014. [Google Scholar]
- Krozel, J.; Peters, M.E.; Hunter, G. Conflict Detection and Resolution for Future Air Transportation; TR97138-01; NASA: Washington, DC, USA, 1997.
- Kuchar, J.K.; Yang, L.C. Conflict Detection and Resolution, Air Traffic Control, Alerting Systems, Warning Systems. IEEE Trans. Intell. Transp. Syst. 2000, 1, 179–189. [Google Scholar] [CrossRef]
- Erzberger, H.; Heere, K. Algorithm and Operational Concept for Resolving Short-Range Conflicts. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2010, 224, 225–243. [Google Scholar] [CrossRef]
- Lehouillier, T.; Nasri, M.I.; Soumis, F.; Desaulniers, G.; Omer, J. Solving the Air Conflict Resolution Problem Under Uncertainty Using an Iterative Biobjective Mixed Integer Programming Approach. Transp. Sci. 2017, 51, 1242–1258. [Google Scholar] [CrossRef][Green Version]
- Sunil, E.; Ellerbroek, J.; Hoekstra, J.M.; Maas, J. Three-Dimensional Conflict Count Models for Unstructured and Layered Airspace Designs. Transp. Res. Part C Emerg. Technol. 2018, 95, 295–319. [Google Scholar] [CrossRef]
- Alam, S.; Shafi, K.; Abbass, H.A.; Barlow, M. An Ensemble Approach for Conflict Detection in Free Flight by Data Mining. Transp. Res. Part C Emerg. Technol. 2009, 17, 298–317. [Google Scholar] [CrossRef]
- Paielli, R.A.; Erzberger, H. Conflict Probability Estimation for Free Flight. J. Guid. Control. Dyn. 1997, 20, 588–596. [Google Scholar] [CrossRef]
- Paielli, R.A.; Erzberger, H. Trajectory Specification for Terminal Air Traffic: Pairwise Conflict Detection and Resolution. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- Barnier, N.; Allignol, C. 4D-Trajectory Deconfliction Through Departure Time Adjustment. Available online: https://hal-enac.archives-ouvertes.fr/hal-00938231/ (accessed on 28 January 2009).
- Geisinger, K.E. Airspace Conflict Equations. Transp. Sci. 1985, 19, 139–153. [Google Scholar] [CrossRef]
- ICAO. Doc 9689-AN/953 - Manual on Airspace Planning Methodology for the Determination of Separation Minima. Available online: https://searchworks.stanford.edu/view/4026380 (accessed on 18 January 2019).
- Netjasov, F. Framework for Airspace Planning and Design Based on Conflict Risk Assessment Part 1: Conflict Risk Assessment Model for Airspace Strategic Planning. Transp. Res. Part C Emerg. Technol. 2012, 24, 190–212. [Google Scholar] [CrossRef]
- Speijker, L.J.P.; Blom, H.A.P.; Bakker, G.J.; Karwal, A.K.; Van baren, G.B.; Klompstra, M.B.; Kruijsen, E.A.C. RASMAR Final Report: Risk Analysis of Simultaneous Missed Approaches on Schiphol Converging Runways I9R and 22; Nationaal Nationaal Lucht- en Ruimtevaartlaboratorium: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Henry, M.; Schmitz, S.; Revenko, N.; Kelbaugh, K. A Monte Carlo Simulation for Evaluating Airborne Collision Risk in Intersecting Runways. In Proceedings of the AIAA Modeling and Simulation Technologies (MST) Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar]
- Pérez-Castán, J.A.; Gómez Comendador, F.; Rodríguez-Sanz, A.; Barragán Montes, R.; Arnaldo Valdés, R.; Pérez Sanz, L. Impact of Continuous Climb Operations on Airport Capacity. Transp. Res. Part C Emerg. Technol. 2018, 96, 231–250. [Google Scholar] [CrossRef]
- Pérez-Castán, J.A.; Comendador, F.G.; Rodríguez-Sanz, Á.; Barragán, R.; Arnaldo-Valdés, R.M. Design of a Conflict-Detection Air Traffic Control Tool for the Implementation of Continuous Climb Operations: A Case Study at Palma TMA. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 095441001983119. [Google Scholar] [CrossRef]
- Pérez-Castán, J.A.; Comendador, F.G.; Rodriguez-Sanz, Á.; Arnaldo Valdés, R.M.; Agueda, G. RPAS Integration in Non-Segregated Airspace: Safety Metrics for Tactical Planning. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233. [Google Scholar] [CrossRef]
- Erzberger, H.; Lauderdale, T.A.; Chu, Y.-C. Automated conflict resolution, arrival management, and weather avoidance for air traffic management. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2012, 226, 930–949. [Google Scholar] [CrossRef]
- EUROCONTROL. European Aviation in 2040—Challenges of Growth. 2018. Available online: https://www.eurocontrol.int/publication/challenges-growth-2018 (accessed on 26 January 2020).
- EUROCONTROL. User Manual for the Base of Aircraft DAta (BADA), Family 4. 2014. Available online: https://www.eurocontrol.int/publication/user-manual-base-aircraft-data-bada (accessed on 26 January 2020).
- Rey, D.; Rapine, C.; Fondacci, R.; Faouzi, N.-E. Subliminal Speed Control in Air Traffic Management: Optimization and Simulation. Transp. Sci. 2016, 50, 240–262. [Google Scholar] [CrossRef]
- Piric, S.; De Boer, R.J.; Roelen, A.; Karanikas, N.; Kaspers, S. How Does Aviation Industry Measure Safety Performance Current Practice and Limitations. Int. J. Aviat. Manag. 2019, 4, 224. [Google Scholar] [CrossRef]
- Campos, L.M.B.C.; Marques, J.M.G. On a Dimensionless Alternative to the ICAO Target Level of Safety. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 230, 1548–1557. [Google Scholar] [CrossRef]
- Netjasov, F.; Janic, M. A Review of Research on Risk and Safety Modelling in Civil Aviation. J. Air Transp. Manag. 2008, 14, 213–220. [Google Scholar] [CrossRef]
- Netjasov, F. Framework for Airspace Planning and Design Based on Conflict Risk Assessment. Part 2: Conflict Risk Assessment Model for Airspace Tactical Planning. Transp. Res. Part C Emerg. Technol. 2012, 24, 213–226. [Google Scholar] [CrossRef]
- Pérez-Castán, J.A.; Gómez Comendador, F.; Rodríguez-Sanz, Á.; Arnaldo Valdés, R.M. Conflict-Risk Assessment Model for Continuous Climb Operations. Aerosp. Sci. Technol. 2019, 84, 812–820. [Google Scholar] [CrossRef]
- EUROCONTROL. “RECAT-EU” European Wake Turbulence Categorisation and Separation Minima on Approach and Departure. 2018. Available online: https://www.eurocontrol.int/publication/european-wake-turbulence-categorisation-and-separation-minima-approach-and-departure (accessed on 26 January 2020).
- SESAR Joint Undertaking. Optimised Airspace User Operations. 2016. Available online: https://www.eurocontrol.int/project/optimised-airspace-users-operations (accessed on 26 January 2020).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| City-Pair | Sevilla-Barcelona | Vigo-Murcia |
|---|---|---|
| Departure | 5°53′35″ W, 37°25′05″ N | 8°37′36″ W, 42°13′54″ N |
| Arrival | 2°04′42″ E, 41°17′49″ N | 0°48′45″ W, 37°46′30″ N |
| Mach | = 0.78 | = 0.78 |
| Flight Level | 350 | 350 |
| Climbing time | = 25:00 | = 26:00 |
| Departure time | - | = 00:00 |
| Time at intersection | - | = 47:00 |
| Mode | Temporary-Blocking Windows | Time Span (sec) |
|---|---|---|
| Updated speed | [20:36; 25:38] | 302 |
| Adjusted speed | [21:44; 24:30] | 166 |
| Wind Direction | Intensity (kts) | ||||||
|---|---|---|---|---|---|---|---|
| 0 | 5 | 10 | 15 | 20 | 30 | 40 | |
| 0° | [20:43; 25:31] | [20:29; 25:15] | [20:16; 25:03] | [19:54; 24:43] | [19:50; 24:38] | [19:18; 24:06] | [18:42; 23:32] |
| 20° | [20:31; 25:19] | [20:26; 25:15] | [20:15; 25:05] | [20:05; 24:55] | [19:36; 24:26] | [19:13; 24:05] | |
| 40° | [20:40; 25:28] | [20:38; 25:28] | [20:31; 25:20] | [20:27; 25:18] | [20:14; 25:06] | [20:03; 24:55] | |
| 60° | [20:48; 25:37] | [20:49; 25:39] | [20:49; 25:41] | [20:50; 25:42] | [20:48; 25:42] | [20:55; 25:51] | |
| 80° | [20:54; 25:44] | [20:53; 25:45] | [21:12; 25:36] | [21:18; 26:10] | [21:35; 26:30] | [21:52; 26:49] | |
| 100° | [21:02; 25:50] | [21:11; 26:01] | [21:23; 26:14] | [21:45; 26:39] | [22:12; 27:07] | [22:42; 27:38] | |
| 120° | [20:57; 25:47] | [21:15; 26:06] | [21:43; 26:33] | [21:57; 26:49] | [22:32; 27:26] | [23:15; 28:12] | |
| 140° | [21:05; 25:53] | [21:32; 26:24] | [21:44; 26:35] | [21:59; 26:51] | [22:47; 27:40] | [23:31; 28:24] | |
| 160° | [20:56; 25:46] | [21:23; 26:12] | [21:49; 26:41] | [21:59; 26:49] | [22:41; 27:31] | [23:21; 28:13] | |
| 180° | [20:59; 25:47] | [21:18; 26:06] | [21:32; 26:20] | [21:51; 26:39] | [22:18; 27:07] | [22:53; 27:41] | |
| 200° | [21:00; 25:50] | [21:07; 25:54] | [21:17; 26:05] | [21:23; 26:11] | [21:49; 26:35] | [22:09; 26:55] | |
| 220° | [20:52; 25:40] | [21:03; 25:15] | [20:57; 25:43] | [20:58; 25:44] | [21:15; 26:00] | [21:20; 26:03] | |
| 240° | [20:47; 25:35] | [20:46; 25:32] | [20:41; 25:27] | [20:37; 25:21] | [20:38; 25:21] | [20:29; 25:10] | |
| 260° | [20:36; 25:23] | [20:34; 25:20] | [20:19; 25:04] | [20:09; 24:52] | [19:52; 24:36] | [19:42; 24:23] | |
| 280° | [20:29; 25:17] | [20:23; 25:09] | [20:04; 24:50] | [19:58; 24:42] | [19:24; 24:08] | [19:05; 23:46] | |
| 300° | [20:20; 25:10] | [20:06; 24:52] | [19:54; 24:39] | [19:43; 24:29] | [19:09; 24:51] | [18:38; 23:20] | |
| 320° | [20:27; 25:15] | [20:06; 24:52] | [19:51; 24:37] | [19:30; 24:16] | [18:56; 24:43] | [18:25; 23:09] | |
| 340° | [20:30; 25:18] | [20:09; 24:56] | [19:55; 24:42] | [19:34; 24:20] | [19:08; 24:56] | [18:26; 23:12] | |
| Variable Wind | Difference | Displacement | ||
|---|---|---|---|---|
| 0° | [19:23; 24:02] | 2 sec | (0.7%) | −5 sec |
| 20° | [19:54; 24:28] | 0 sec | (0%) | 2 sec |
| 40° | [20:22; 24:04] | 1 sec | (0.3%) | −2.5 sec |
| 60° | [20:25; 24:46] | 0 sec | (0%) | 4 sec |
| 80° | [21:26; 24:29] | 0 sec | (0%) | −1 sec |
| 100° | [22:32; 24:04] | −1 sec | (−0.3%) | −2.5 sec |
| 120° | [22:28; 24:28] | −2 sec | (−0.7%) | 3 sec |
| 140° | [22:27; 24:38] | −1 sec | (−0.3%) | −1.5 sec |
| 160° | [22:27; 24:31] | 0 sec | (0%) | 0 sec |
| 180° | [22:27; 24:07] | −1 sec | (−0.3%) | 0.5 sec |
| 200° | [21:26; 24:35] | 0 sec | (0%) | 0 sec |
| 220° | [21:25; 24:55] | −1 sec | (−0.4%) | −4.5 sec |
| 240° | [20:25; 24:16] | 1 sec | (0.4%) | −5.5 sec |
| 260° | [19:54; 24:39] | −3 sec | (–1.1%) | 4.5 sec |
| 280° | [19:44; 24:11] | −2 sec | (−0.7%) | 4 sec |
| 300° | [19:23; 24:51] | 1 sec | (0.4%) | −0.5 sec |
| 320° | [18:53; 24:42] | 0 sec | (0%) | −1 sec |
| 340° | [18:23; 24:45] | −2 sec | (−0.7%) | −5 sec |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pérez-Castán, J.A.; Rodríguez-Sanz, Á.; Pérez Sanz, L.; Arnaldo Valdés, R.M.; Gómez Comendador, V.F.; Greatti, C.; Serrano-Mira, L. Probabilistic Strategic Conflict-Management for 4D Trajectories in Free-Route Airspace. Entropy 2020, 22, 159. https://doi.org/10.3390/e22020159
Pérez-Castán JA, Rodríguez-Sanz Á, Pérez Sanz L, Arnaldo Valdés RM, Gómez Comendador VF, Greatti C, Serrano-Mira L. Probabilistic Strategic Conflict-Management for 4D Trajectories in Free-Route Airspace. Entropy. 2020; 22(2):159. https://doi.org/10.3390/e22020159
Chicago/Turabian StylePérez-Castán, Javier Alberto, Álvaro Rodríguez-Sanz, Luis Pérez Sanz, Rosa M. Arnaldo Valdés, V. Fernando Gómez Comendador, Clemence Greatti, and Lidia Serrano-Mira. 2020. "Probabilistic Strategic Conflict-Management for 4D Trajectories in Free-Route Airspace" Entropy 22, no. 2: 159. https://doi.org/10.3390/e22020159
APA StylePérez-Castán, J. A., Rodríguez-Sanz, Á., Pérez Sanz, L., Arnaldo Valdés, R. M., Gómez Comendador, V. F., Greatti, C., & Serrano-Mira, L. (2020). Probabilistic Strategic Conflict-Management for 4D Trajectories in Free-Route Airspace. Entropy, 22(2), 159. https://doi.org/10.3390/e22020159