Coexisting Infinite Orbits in an Area-Preserving Lozi Map


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Area-Preserving Lozi Map
2.1. The Classical Lozi Map
2.2. Stability for the Fixed Points
2.3. Quasi-Periodic Route to Chaos
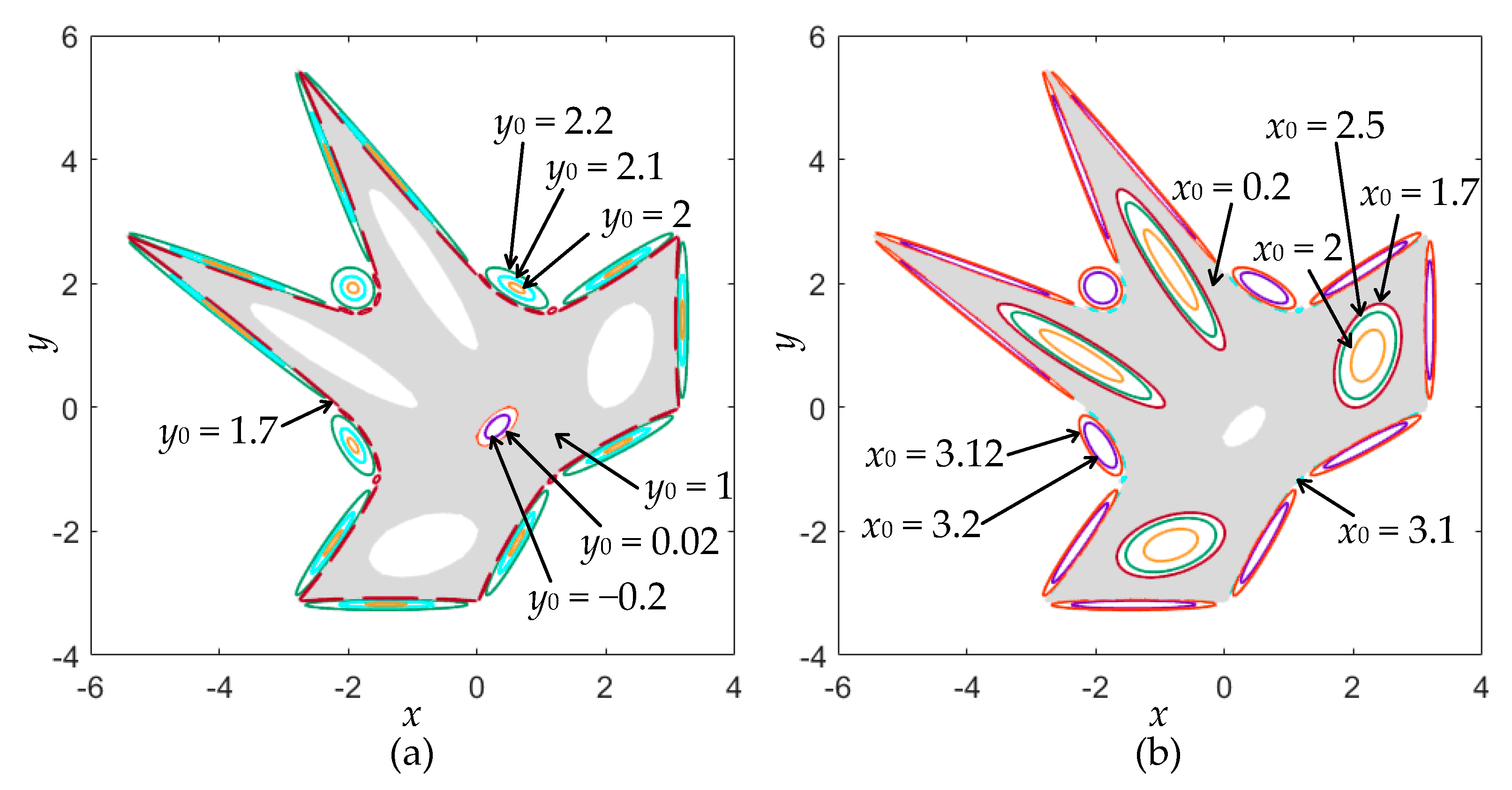
3. Initial Values-Related Coexisting Infinite Orbits
3.1. Coexisting Chaotic and Quasi-Periodic Orbits
3.2. Coexisting Chaotic and Periodic Orbits
3.3. Initial Values-Switched Iterative Sequences
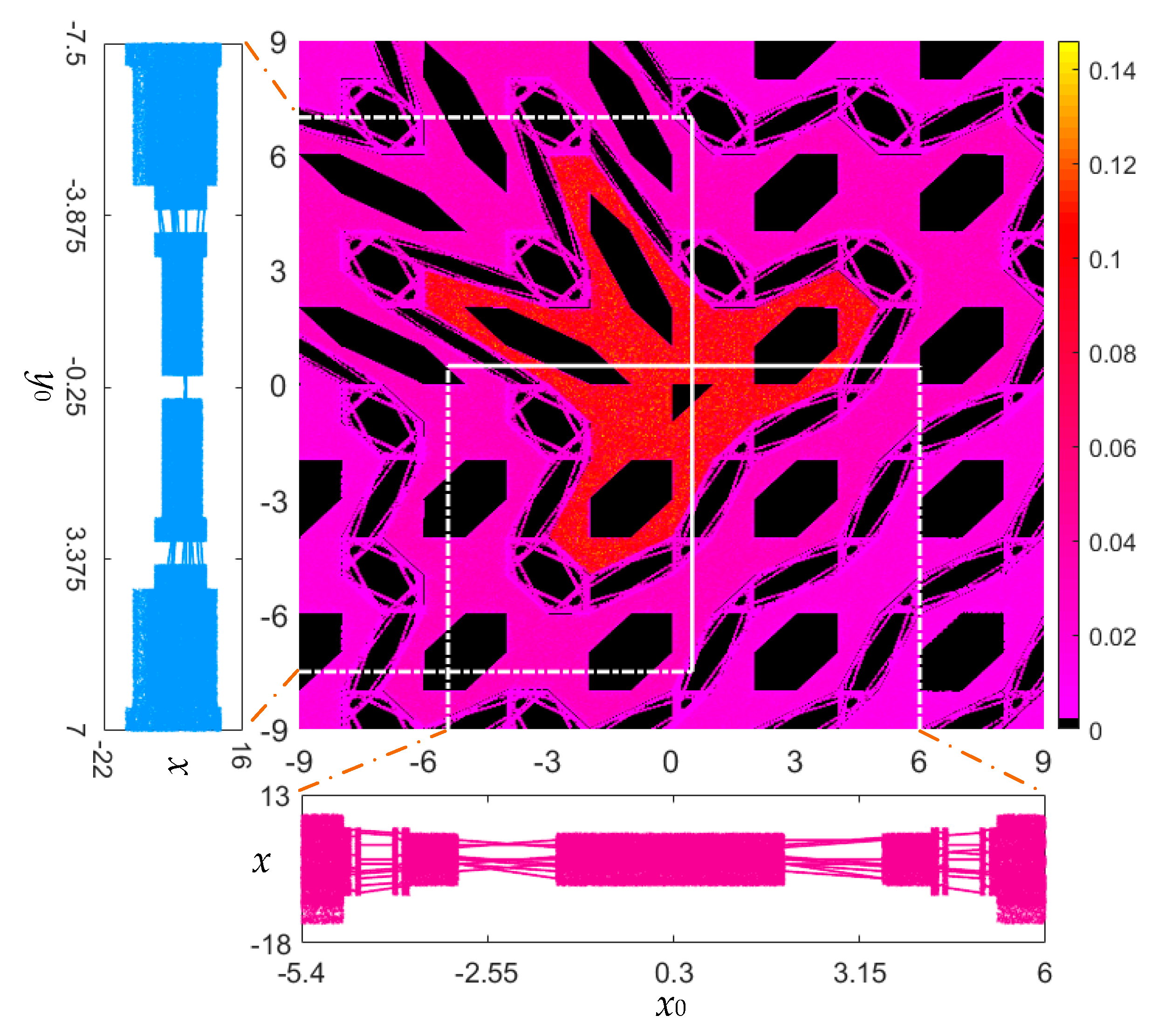
4. Initial Values-Related Complexity
4.1. SE-Based Complexity
4.2. SampEn-Based Complexity
5. Hardware Experiment
| Algorithm 1 The microcontroller-based main program |
| Initialize the microcontroller and configure the output pins; Set the length N of sequences, the Number M of interpolation; Set intermediate variables step1,2,3,4, temp1,2,3,4 and value1,2,3,4; while true Set four sets of (ai, bi, xi,0, yi,0) (i = 1,2,3,4); for i = 1 to N //system equation x1,i+1 = 1 − a1|x1,i| + y1,i; y1,i+1 = b1×1,i; … x4,i+1 = 1 − a4|x4,i| + y4,i; y4,i+1 = b4×4,i; //interpolation step1 = (x1,i+1 − x1,i)/M; … step4 = (x4,i+1 − x4,i)/M; for j = 0 to M − 1 temp1 = x1,i + j∙step1; value1 = (temp1 + 15)*4096/30; … temp4 = x4,i + j∙step4; value4 = (temp4 + 15)*4096/30; Transfer the value1,2,3,4 to TLV5618; end end |
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hua, Z.; Zhou, Y.; Bao, B. Two-dimensional sine chaotification system with hardware implementation. IEEE Trans. Ind. Inform. 2020, 16, 887–897. [Google Scholar] [CrossRef]
- Wang, N.; Li, C.Q.; Bao, H.; Chen, M.; Bao, B.C. Generating multi-scroll Chua’s attractors via simplified piecewise-linear Chua’s diode. IEEE Trans. Circuits Syst. I Reg. Pap. 2019, 66, 4767–4779. [Google Scholar] [CrossRef]
- Lan, R.; He, J.W.; Wang, S.H.; Liu, Y.N.; Luo, X.N. A parameter-selection-based chaotic system. IEEE Trans. Circuits Syst. II Exp. Briefs 2019, 66, 492–496. [Google Scholar] [CrossRef]
- Moysis, L.; Volos, C.; Jafari, S.; Munoz-Pacheco, J.M.; Kengne, J.; Rajagopal, K.; Stouboulos, I. Modification of the logistic map using fuzzy numbers with application to pseudorandom number generation and image encryption. Entropy 2020, 22, 474. [Google Scholar] [CrossRef]
- Lin, C.-Y.; Wu, J.-L. Cryptanalysis and improvement of a chaotic map-based image encryption system using both plaintext related permutation and diffusion. Entropy 2020, 22, 589. [Google Scholar] [CrossRef]
- Ding, L.; Ding, Q. The establishment and dynamic properties of a new 4D hyperchaotic system with its application and statistical tests in gray images. Entropy 2020, 22, 310. [Google Scholar] [CrossRef]
- Kocamaz, U.E.; Çiçek, S.; Uyaroğlu, Y. Secure communication with chaos and electronic circuit design using passivity-based synchronization. J. Circuits Syst. Comp. 2018, 27, 1850057. [Google Scholar] [CrossRef]
- Lai, Q.; Chen, S. Coexisting attractors generated from a new 4D smooth chaotic system. Int. J. Control Autom. Syst. 2016, 14, 1124–1131. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, G.Y.; Shen, Y.R.; Yuan, F.; Yu, S.M. Hidden coexisting attractors in a chaotic system without equilibrium point. Int. J. Bifurc. Chaos 2018, 28, 1830033. [Google Scholar] [CrossRef]
- Yuan, F.; Wang, G.; Wang, X. Extreme multistability in a memristor-based multi-scroll hyper-chaotic system. Chaos 2016, 26, 073107. [Google Scholar] [CrossRef]
- Chen, M.; Li, M.; Yu, Q.; Bao, B.; Xu, Q.; Wang, J. Dynamics of self-excited attractors and hidden attractors in generalized memristor-based Chua’s circuit. Nonlinear Dyn. 2015, 81, 215–226. [Google Scholar] [CrossRef]
- Chen, C.J.; Chen, J.Q.; Bao, H.; Chen, M.; Bao, B.C. Coexisting multi-stable patterns in memristor synapse-coupled Hopfield neural network with two neurons. Nonlinear Dyn. 2019, 95, 3385–3399. [Google Scholar] [CrossRef]
- Njitacke, Z.T.; Kengne, J. Complex dynamics of a 4D Hopfield neural networks (HNNs) with a nonlinear synaptic weight: Coexistence of multiple attractors and remerging Feigenbaum trees. AEU Int. J. Electron. Commun. 2018, 93, 242–252. [Google Scholar] [CrossRef]
- Bao, B.C.; Xu, Q.; Bao, H.; Chen, M. Extreme multistability in a memristive circuit. Electron. Lett. 2016, 52, 1008–1010. [Google Scholar] [CrossRef]
- Bao, B.C.; Jiang, T.; Wang, G.Y.; Jin, P.P.; Bao, H.; Chen, M. Two-memristor-based Chua’s hyperchaotic circuit with plane equilibrium and its extreme multistability. Nonlinear Dyn. 2017, 89, 1157–1171. [Google Scholar] [CrossRef]
- Chen, M.; Sun, M.; Bao, H.; Hu, Y.; Bao, B. Flux–Charge analysis of two-memristor-based Chua’s circuit: Dimensionality decreasing model for detecting extreme multistability. IEEE Trans. Ind. Electron. 2020, 67, 2197–2206. [Google Scholar] [CrossRef]
- Sausedo-Solorio, J.M.; Pisarchik, A.N. Dynamics of unidirectionally coupled bistable Hénon maps. Phys. Lett. A 2011, 375, 3677–3681. [Google Scholar] [CrossRef]
- Pisarchik, A.N. Controlling the multistability of nonlinear systems with coexisting attractors. Phys. Rev. E 2001, 64, 046203. [Google Scholar] [CrossRef]
- Natiq, H.; Banerjee, S.; Ariffin, M.R.K.; Said, M.R.M. Can hyperchaotic maps with high complexity produce multistability? Chaos 2019, 29, 011103. [Google Scholar] [CrossRef]
- Zhusubaliyev, Z.T.; Mosekilde, E. Multistability and hidden attractors in a multilevel DC/DC converter. Math. Comput. Simul. 2015, 109, 32–45. [Google Scholar] [CrossRef]
- Bao, B.C.; Li, H.Z.; Zhu, L.; Zhang, X.; Chen, M. Initial-switched boosting bifurcations in 2D hyperchaotic map. Chaos 2020, 30, 033107. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.-P.; Liu, Y.; Wei, Z.-C.; Jiang, H.-B.; Bi, Q.-S. A novel class of two-dimensional chaotic maps with infinitely many coexisting attractors. Chin. Phys. B 2020, 29, 060501. [Google Scholar] [CrossRef]
- Bao, H.; Hua, Z.Y.; Wang, N.; Zhu, L.; Chen, M.; Bao, B.C. Initials-boosted coexisting chaos in a 2D Sine map and its hardware implementation. IEEE Trans. Ind. Inform. 2020. [Google Scholar] [CrossRef]
- Lozi, R. Un attracteur étrange (?) du type attracteur de Hénon. J. Phys. Colloq. 1978, 39, 9–10. [Google Scholar] [CrossRef]
- Botella–Soler, V.; Castelo, J.M.; Oteo, J.A.; Ros, J. Bifurcations in the Lozi map. J. Phys. A Math. Theor. 2011, 44, 305101. [Google Scholar] [CrossRef]
- Rybalova, E.; Semenova, N.; Strelkova, G.; Anishchenko, V. Transition from complete synchronization to spatio-temporal chaos in coupled chaotic systems with nonhyperbolic and hyperbolic attractors. Eur. Phys. J. Spec. Top. 2017, 226, 1857–1866. [Google Scholar] [CrossRef]
- Hénon, M. A two-dimensional mapping with a strange attractor. Commun. Math. Phys. 1976, 50, 69–77. [Google Scholar] [CrossRef]
- Liu, Z.H.; Chen, S.G. Synchronization of a conservative map. Phys. Rev. E 1997, 56, 1585–1589. [Google Scholar]
- Wang, N.; Zhang, G.S.; Bao, H. Infinitely many coexisting conservative flows in a 4D conservative system inspired by LC circuit. Nonlinear Dyn. 2020, 99, 3197–3216. [Google Scholar] [CrossRef]
- He, S.B.; Sun, K.H.; Wang, H.H. Complexity analysis and DSP implementation of the fractional-order Lorenz hyperchaotic system. Entropy 2015, 17, 8299–8311. [Google Scholar] [CrossRef]
- Richman, J.S.; Moorman, J.R. Physiological time-series analysis using approximate entropy and sample entropy. Am. J. Physiol. Heart Circ. Physiol. 2000, 278, H2039–H2049. [Google Scholar] [CrossRef]
- Kaffashi, F.; Foglyano, R.; Wilson, C.G.; Loparo, K.A. The effect of time delay on approximate & sample entropy calculations. Phys. D 2008, 237, 3069–3074. [Google Scholar]
- Zambrano-Serrano, E.; Muñoz-Pacheco, J.M.; Campos-Cantón, E. Chaos generation in fractional-order switched systems and its digital implementation. AEU Int. J. Electron. Commun. 2017, 79, 43–52. [Google Scholar] [CrossRef]
- Li, H.Z.; Hua, Z.Y.; Bao, H.; Zhu, L.; Chen, M.; Bao, B.C. Two-dimensional memristive hyperchaotic maps and application in secure communication. IEEE Trans. Ind. Electron. 2020. [Google Scholar] [CrossRef]














© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Li, K.; Chen, M.; Bao, B. Coexisting Infinite Orbits in an Area-Preserving Lozi Map. Entropy 2020, 22, 1119. https://doi.org/10.3390/e22101119
Li H, Li K, Chen M, Bao B. Coexisting Infinite Orbits in an Area-Preserving Lozi Map. Entropy. 2020; 22(10):1119. https://doi.org/10.3390/e22101119
Chicago/Turabian StyleLi, Houzhen, Kexin Li, Mo Chen, and Bocheng Bao. 2020. "Coexisting Infinite Orbits in an Area-Preserving Lozi Map" Entropy 22, no. 10: 1119. https://doi.org/10.3390/e22101119
APA StyleLi, H., Li, K., Chen, M., & Bao, B. (2020). Coexisting Infinite Orbits in an Area-Preserving Lozi Map. Entropy, 22(10), 1119. https://doi.org/10.3390/e22101119