A Feature Extraction Method of Ship-Radiated Noise Based on Fluctuation-Based Dispersion Entropy and Intrinsic Time-Scale Decomposition


Abstract
:1. Introduction
2. Methods
2.1. Intrinsic Time-Scale Decomposition (ITD)
- (1)
- Let denote the all local extremas of at time points , and define . We can define baseline signal point as:where and is typical selected as 0.5.
- (2)
- We can define piecewise linear baseline extracting operator of the signal as:
- (3)
- Using the baseline signal as the original signal, repeat steps (1–2), and the original signal is decomposed into:where, is the proper rotation component (PRC), is monotonic trend signal.
- ITD eliminates the needs of sophisticated ‘sifting’ and spline interpolation of local extremas, which are necessary in EMD method. Therefore, the reduction of the computational complexity of ITD allows obtaining the instantaneous parameters of the signal in real time.
- The various instantaneous parameters obtained by ITD decomposition can accurately express the time-varying characteristics of the non-stationary signal frequency (the instantaneous time resolution of the time-frequency information is equal to the time scale corresponding to the extreme point in the input signal). It is worth noting that the time-frequency information is not restricted by the time-frequency uncertainty comparing with one obtained by traditional integral transform.
2.2. Fluctuation-Based Dispersion Entropy
- (1)
- Define time series is , is mapped to , according to normal distribution function, where and the normal distribution function is defined as:where, and respectively represents expectation and standard deviation of time series.
- (2)
- The is linearly mapped to an integer from 1 to .where shows the member of the classified time series and rounding involves either increasing or decreasing a number to the next digit.
- (3)
- Calculate the embedded vector :
- (4)
- The dispersion pattern is defined as: . Each is mapped to a dispersion pattern , where . The number of possible dispersion patterns assigned to each vector is equal to since has elements and each can be one of the integers from to .
- (5)
- For each dispersion pattern , relative frequency is defined as follows:where, represents the number of mapped to . Actually, shows the ratio of to .
- (5)
- According to the definition of Shannon entropy, the FDispEn of original time series is defined as:
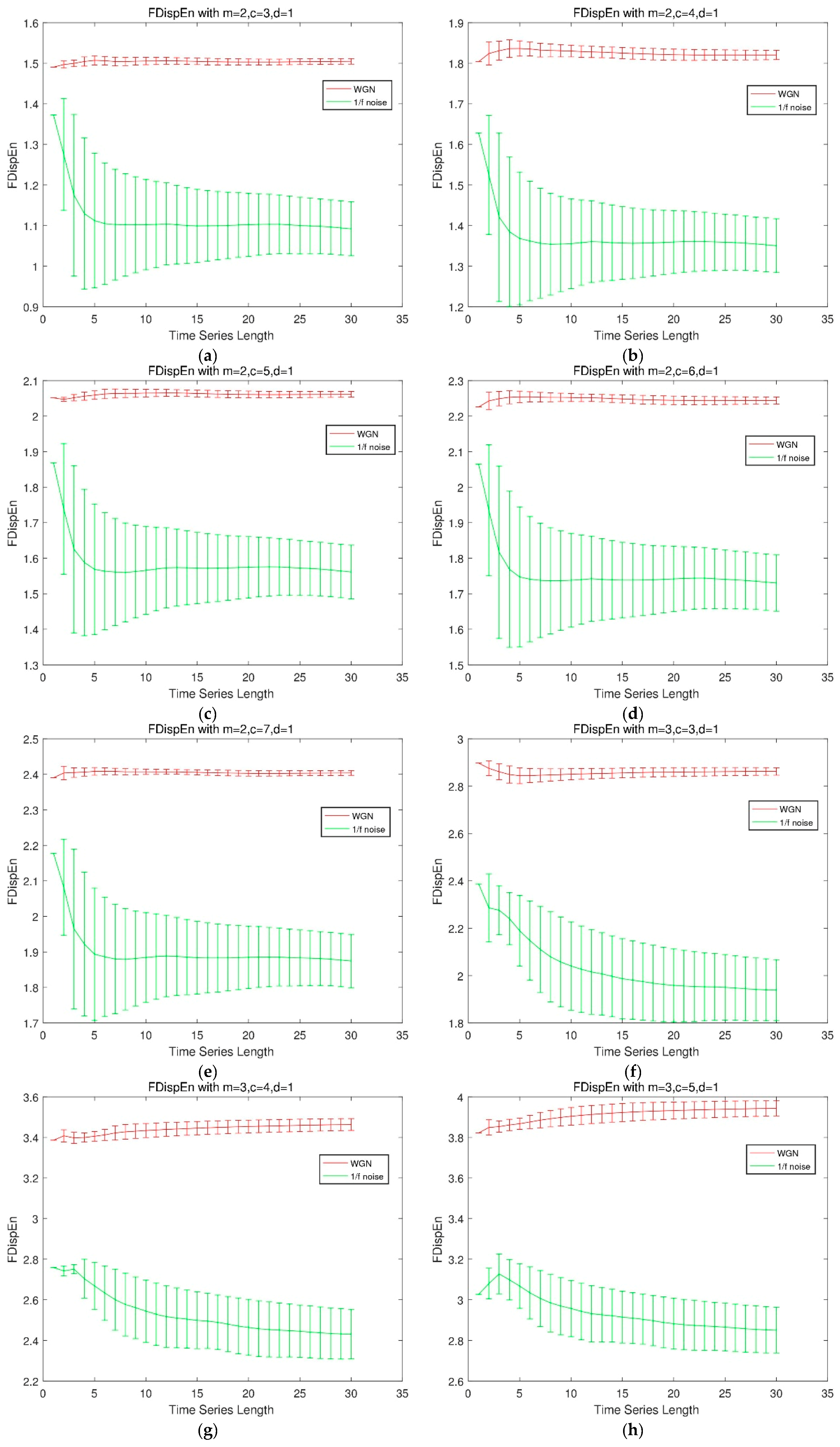
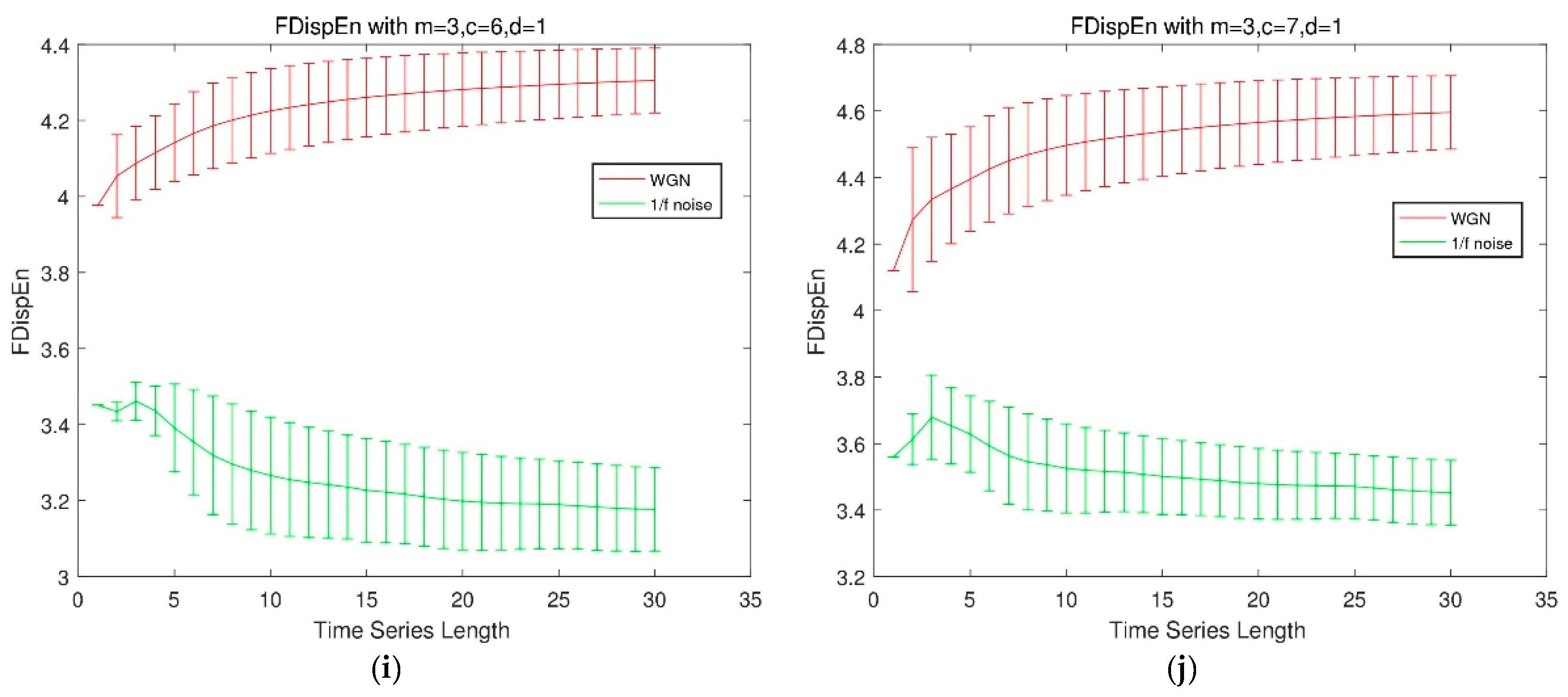
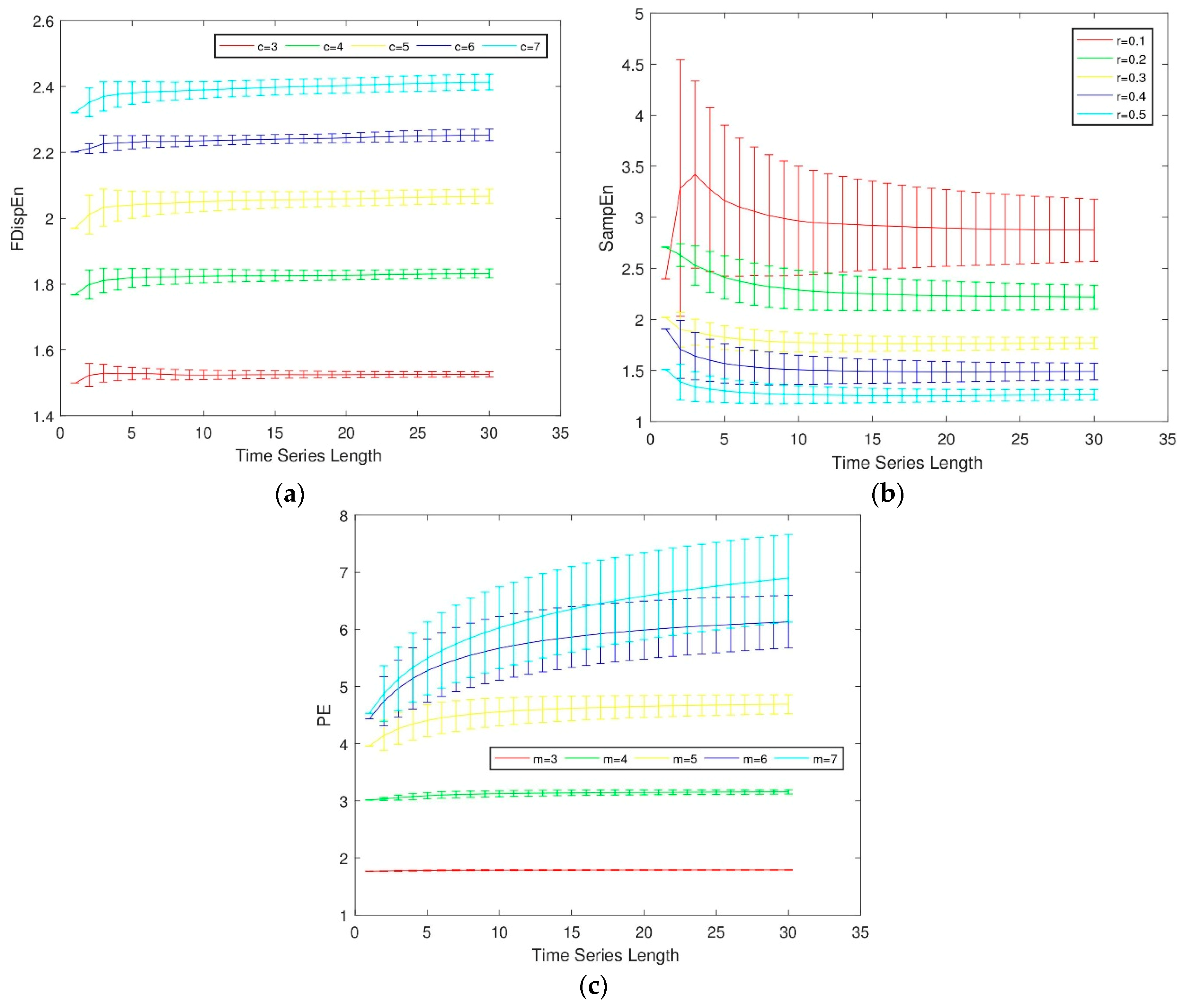
2.3. Performance Analysis of FDispEn
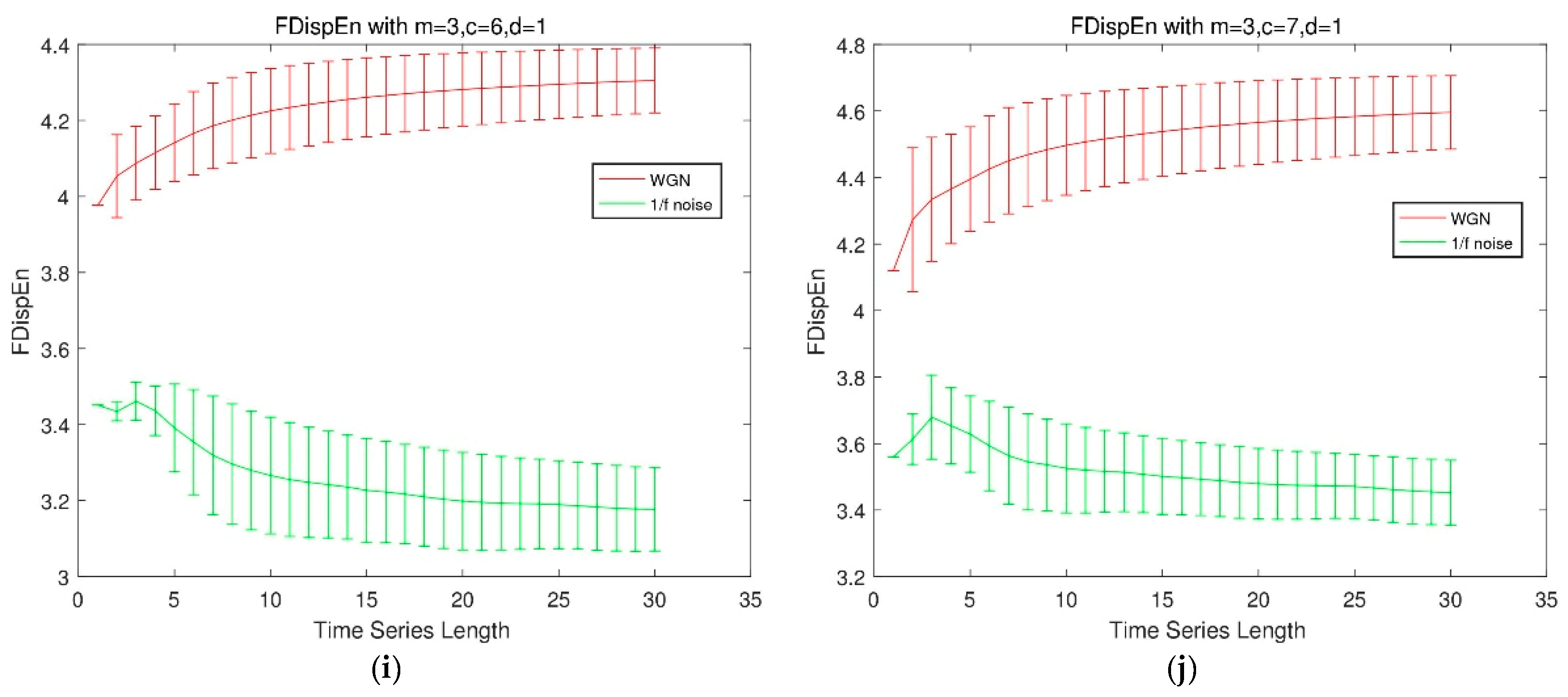
- We compare the FDispEn values of different lengths of Gaussian white noise and noise under different parameter combinations, and make the mean variance diagram. Gaussian white noise and noise with size of 3000 are divided into 30 small groups. The results are shown in Figure 1.
- (2)
- The influence of data size on the calculation result of FDispEn
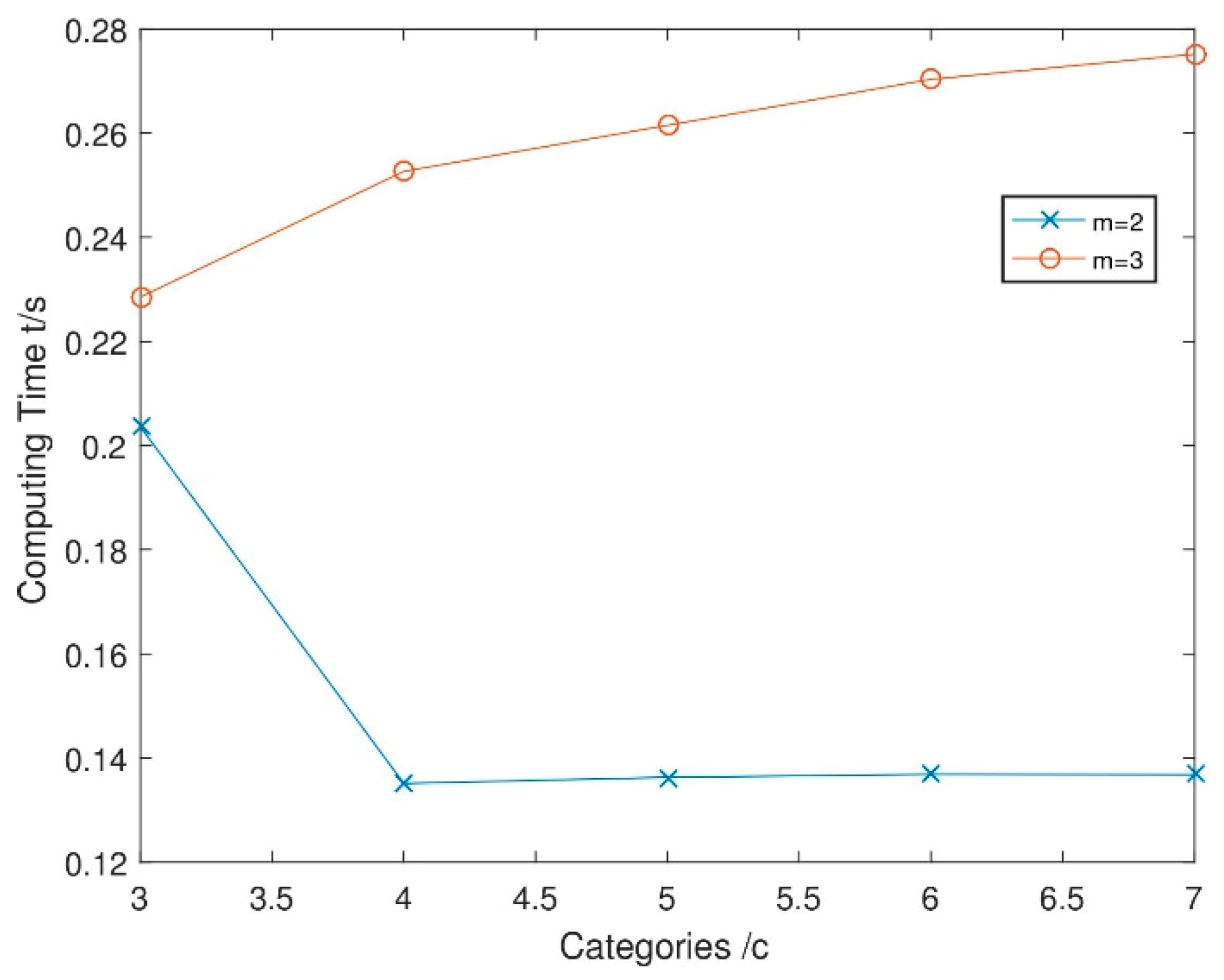
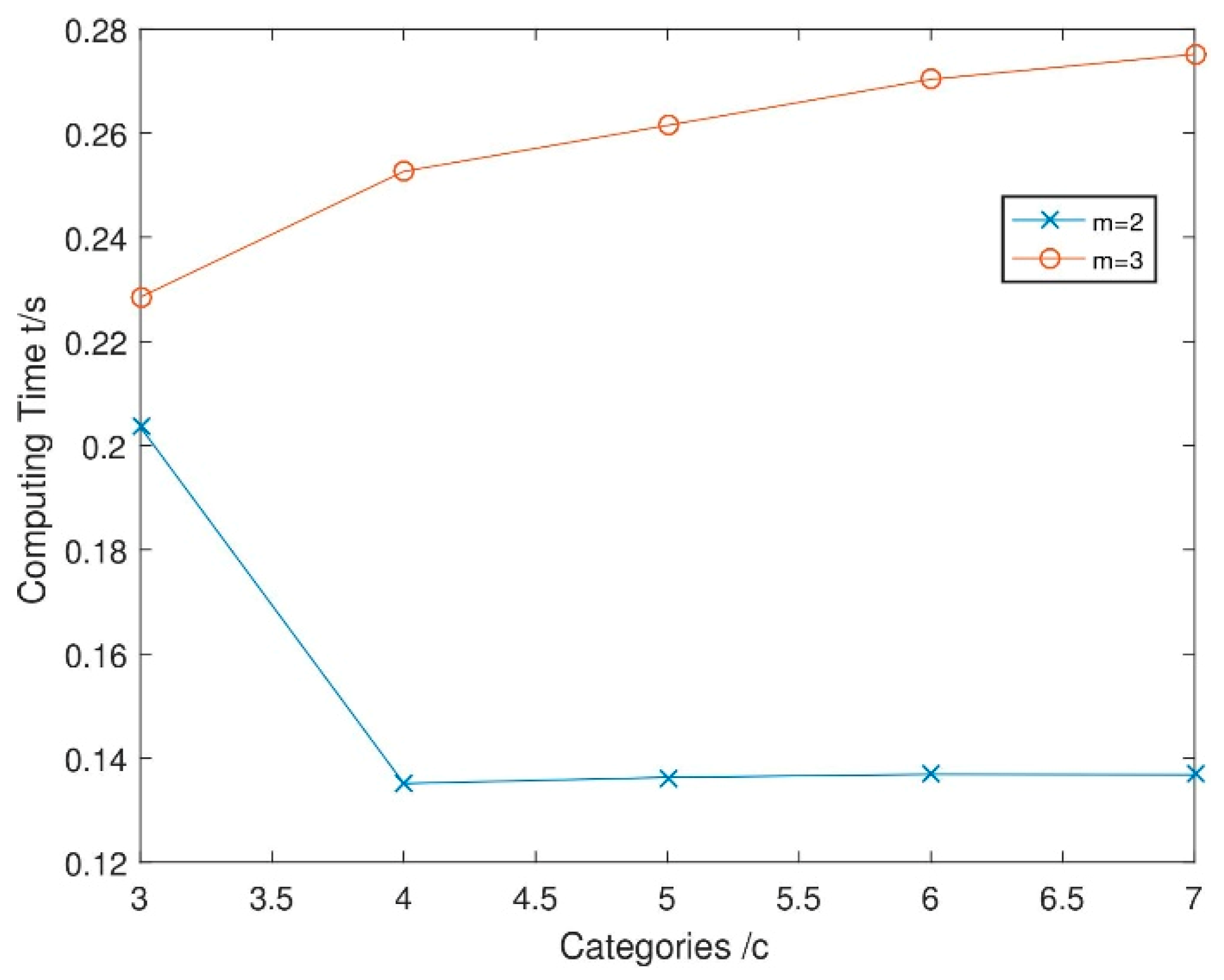
- (3)
- Compare the computational performance of FDispEn with different parameters.
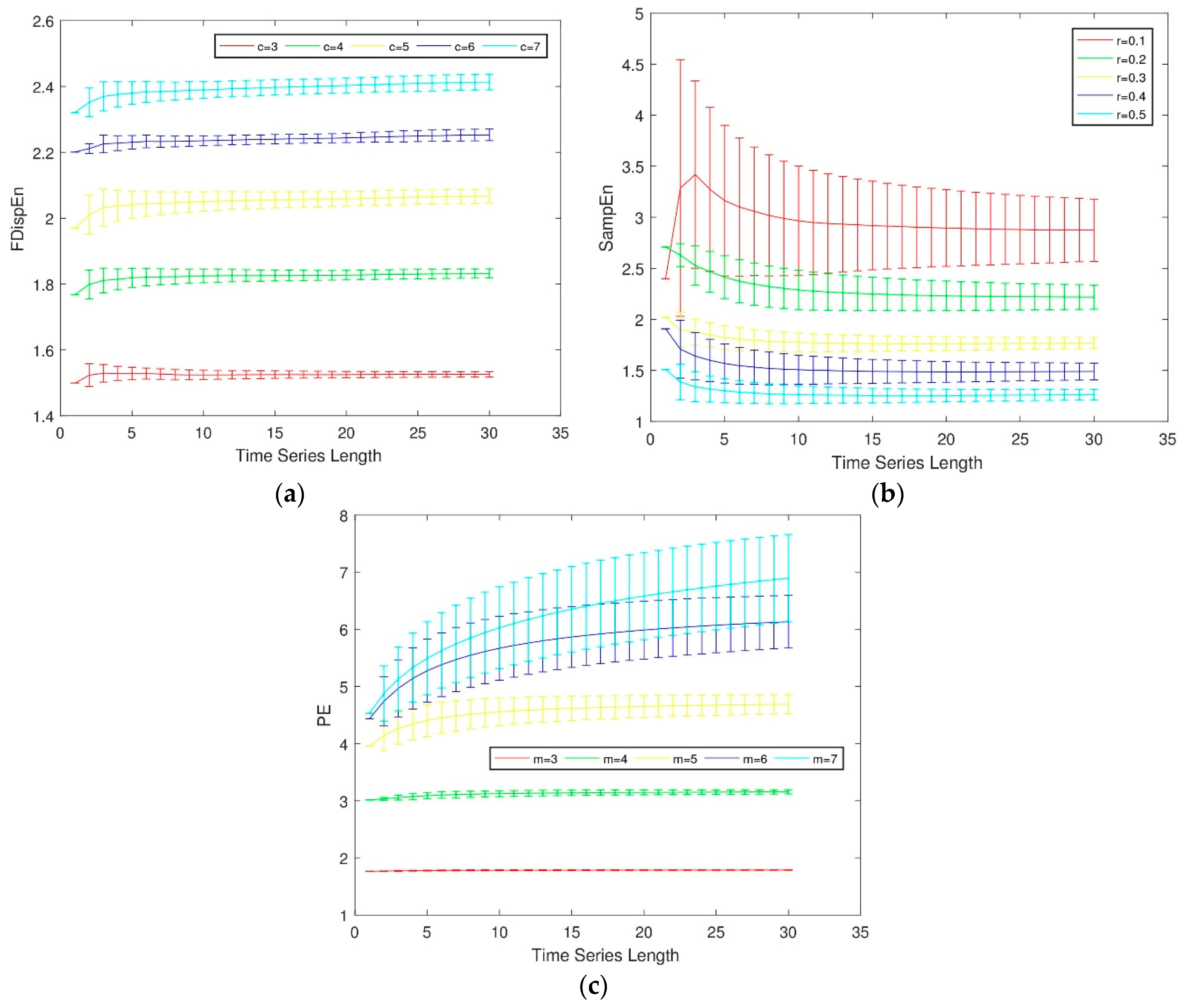
- (4)
- Comparisons of FDispEn with sample entropy (SampEn) and permutation entropy (PE)
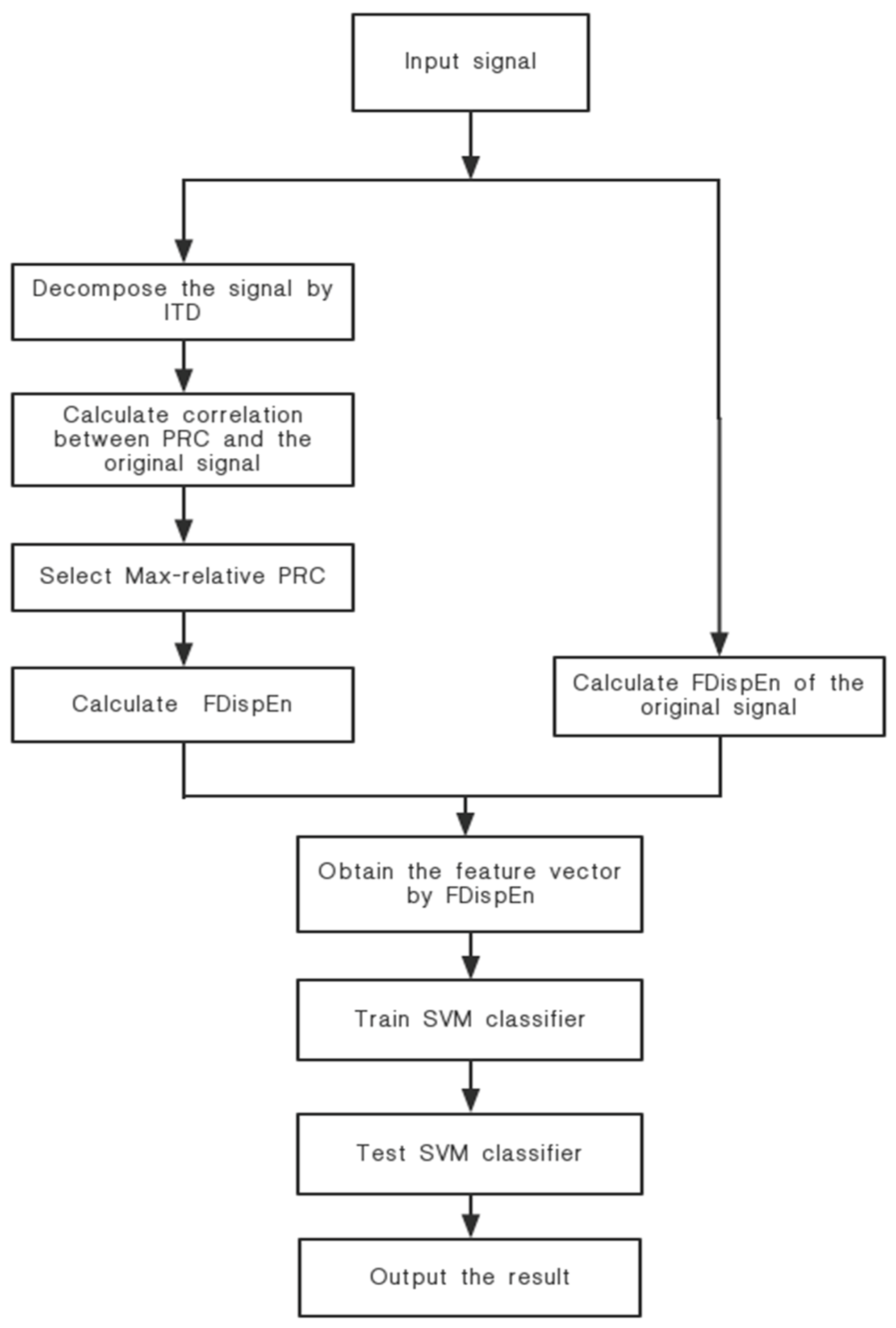
3. Feature Extraction Method of Ship-Radiated Noise Using FDispEn and ITD
3.1. Feature Extraction Technique Using FDispEn and ITD
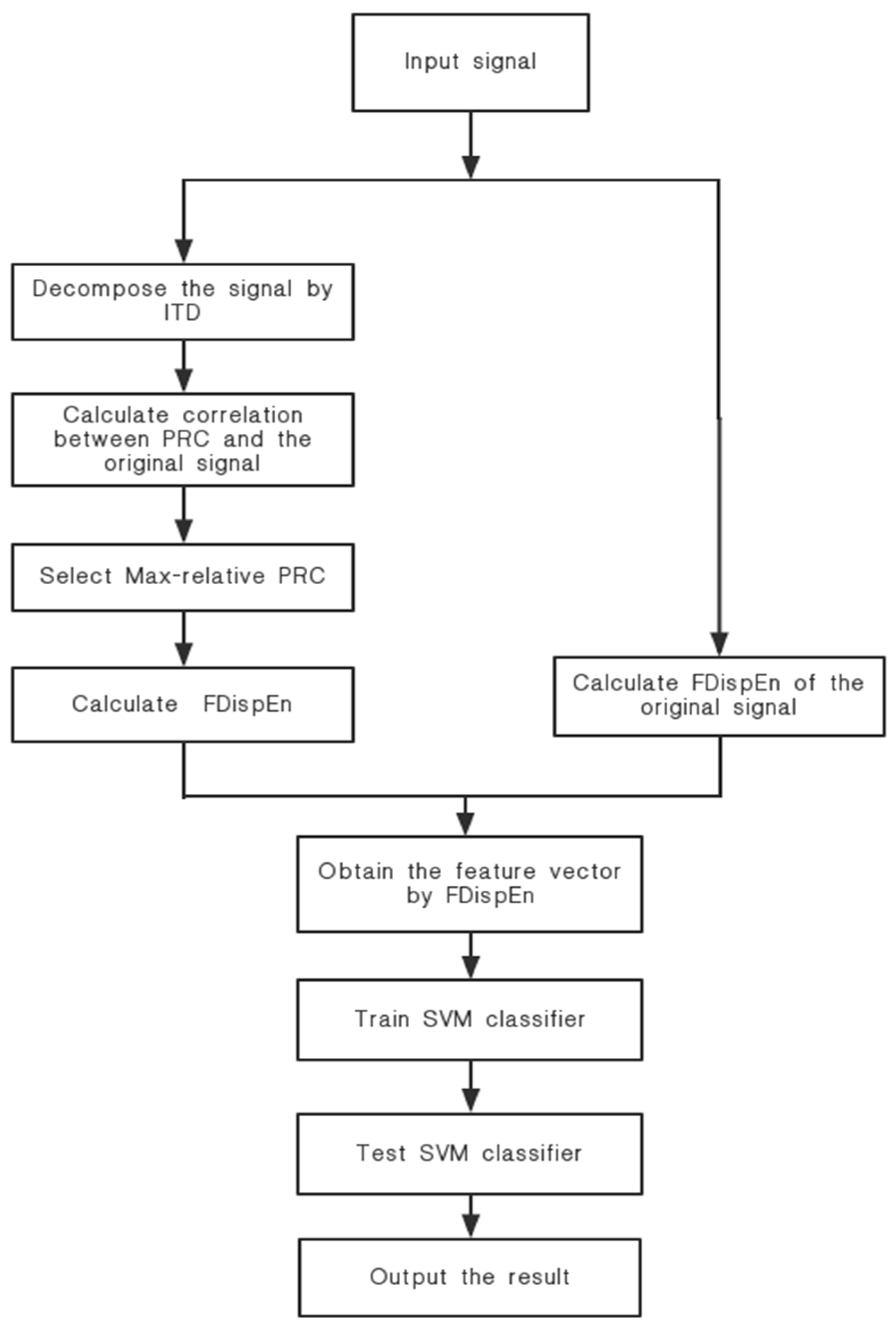
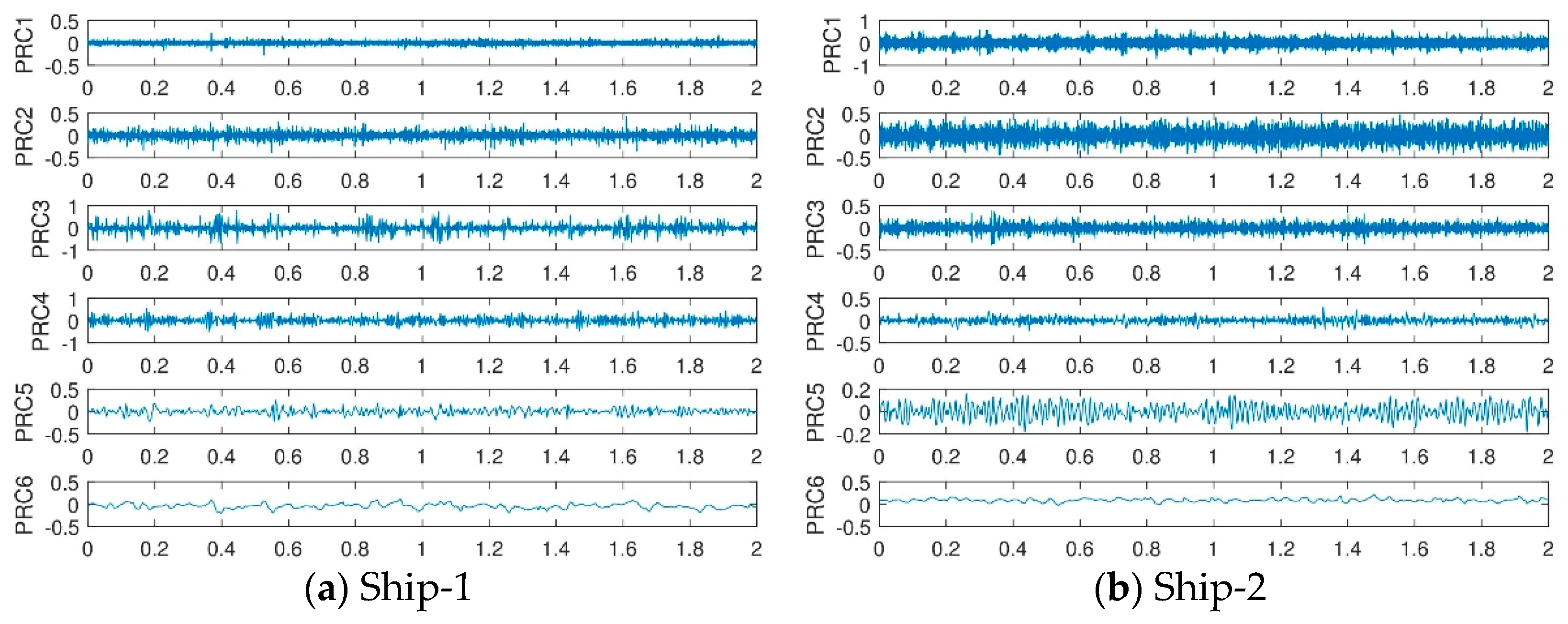
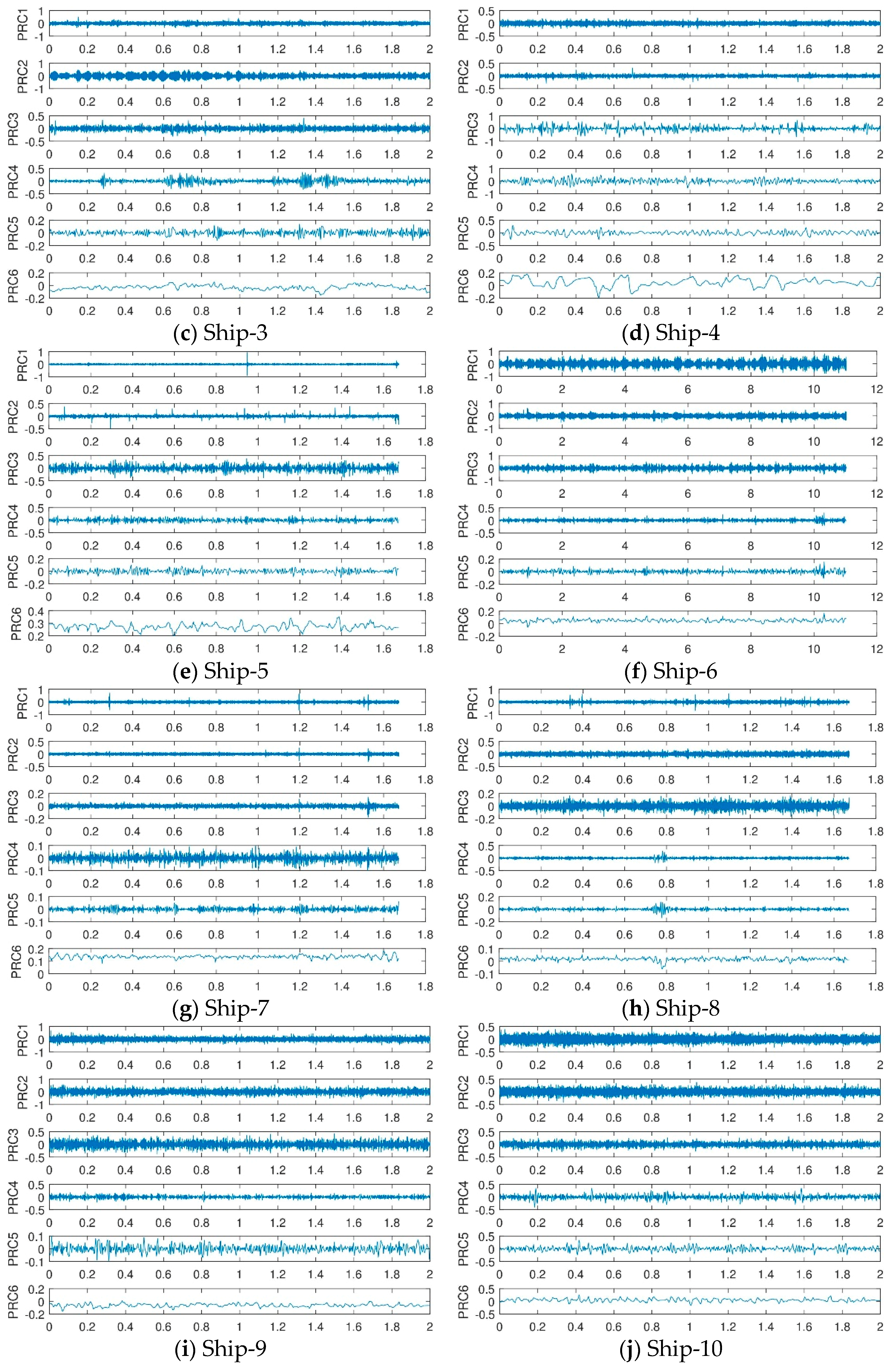
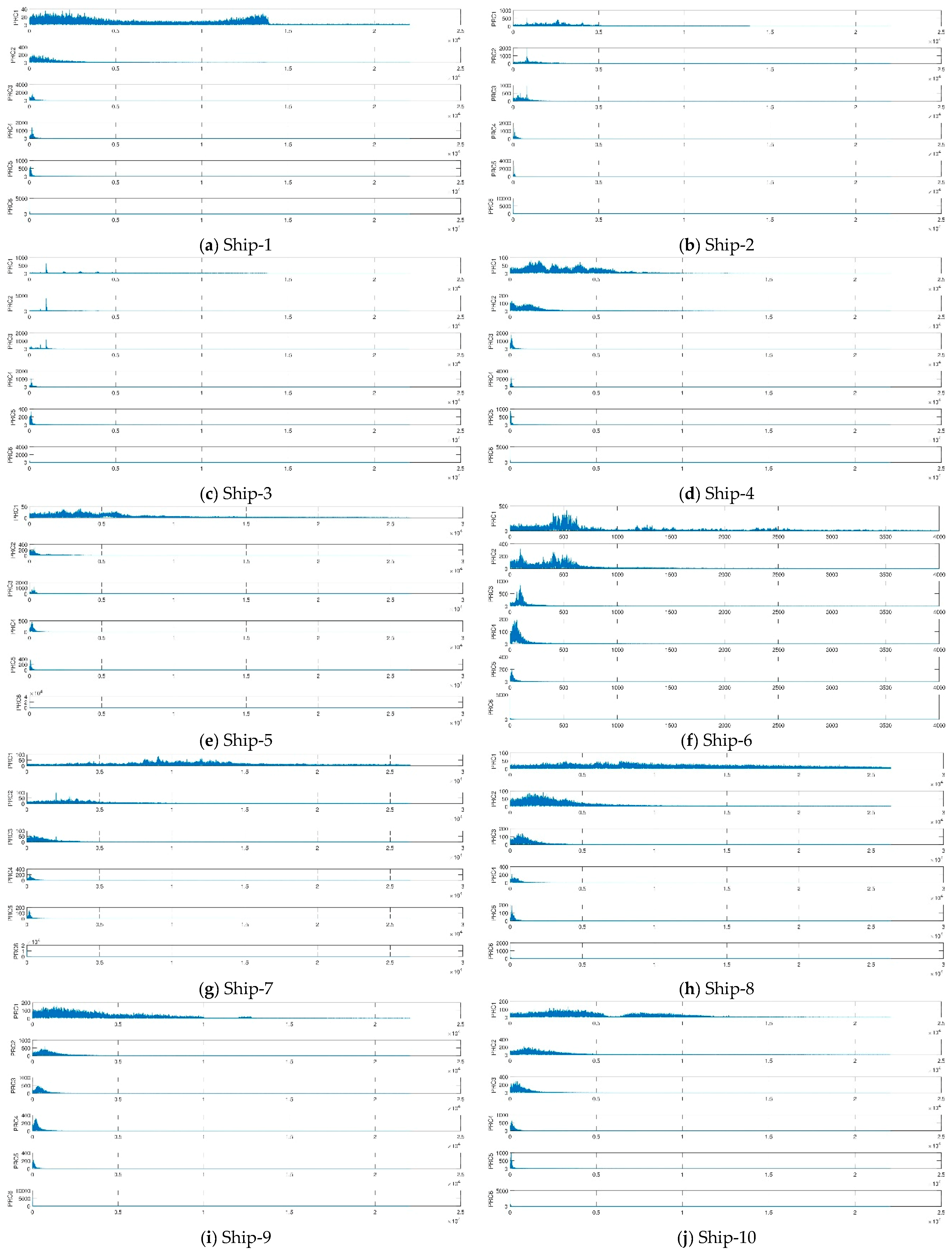
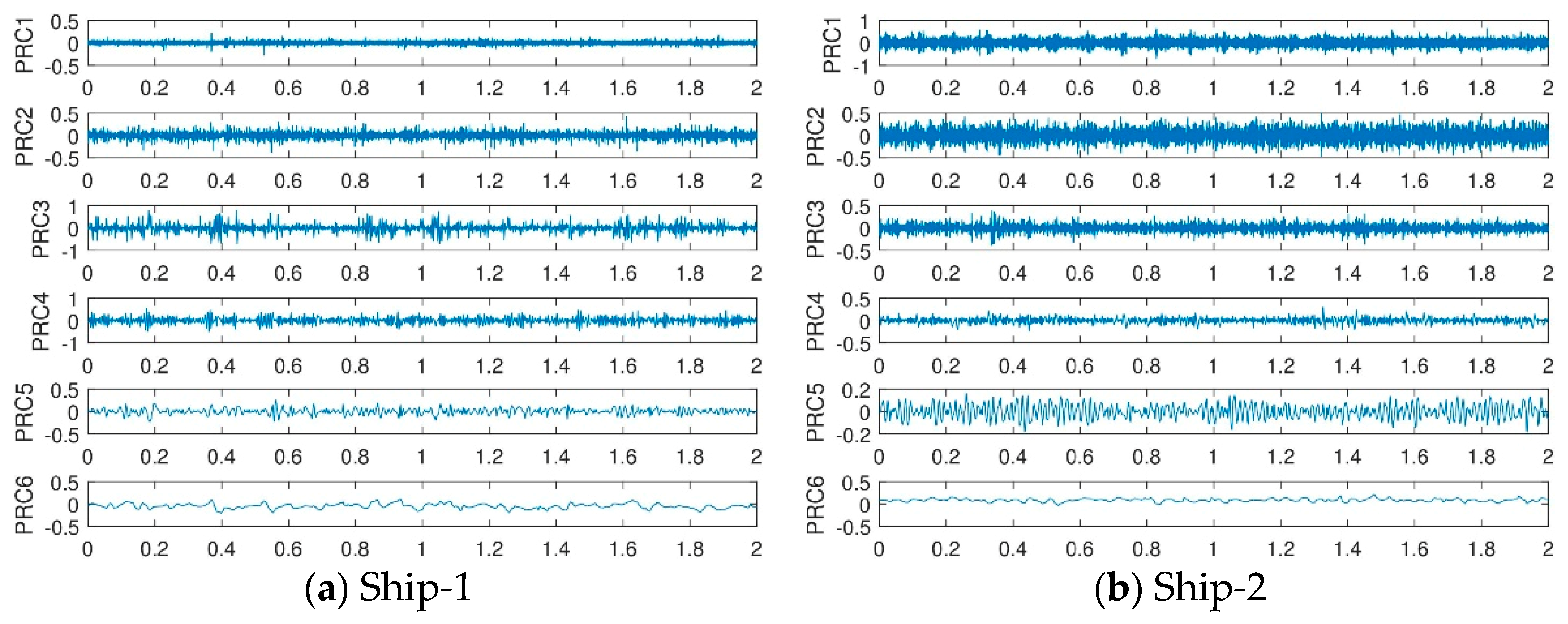
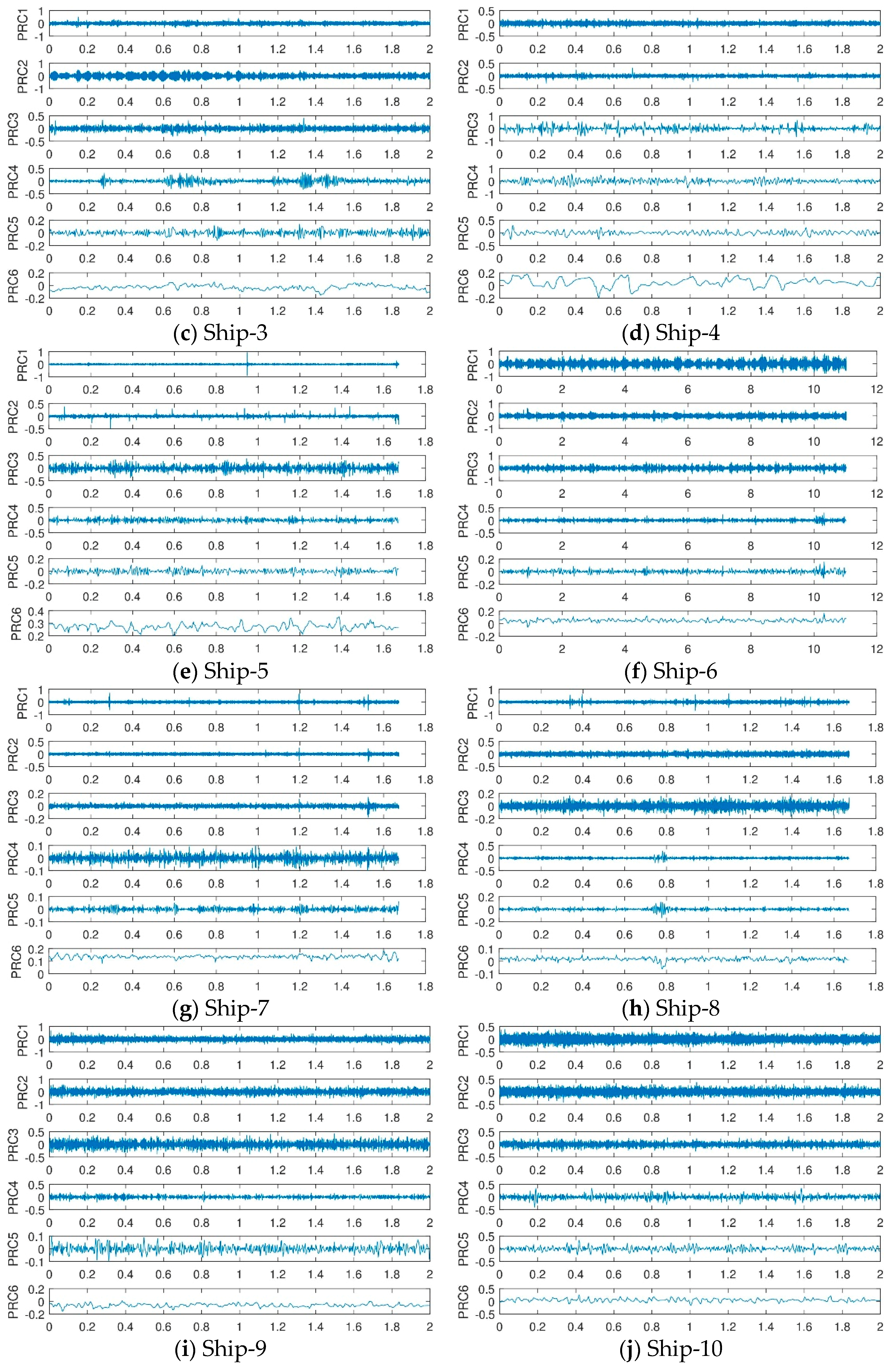
- Perform ITD decomposition on different types of ship-radiated noise, and decompose to obtain a series of proper rotation components and one residual component.
- Calculate the correlation between several proper rotation components obtained from the decomposition and the original signal, and select the proper rotation component with large correlation coefficients as the characteristic parameter to calculate the fluctuation-based dispersion entropy value.
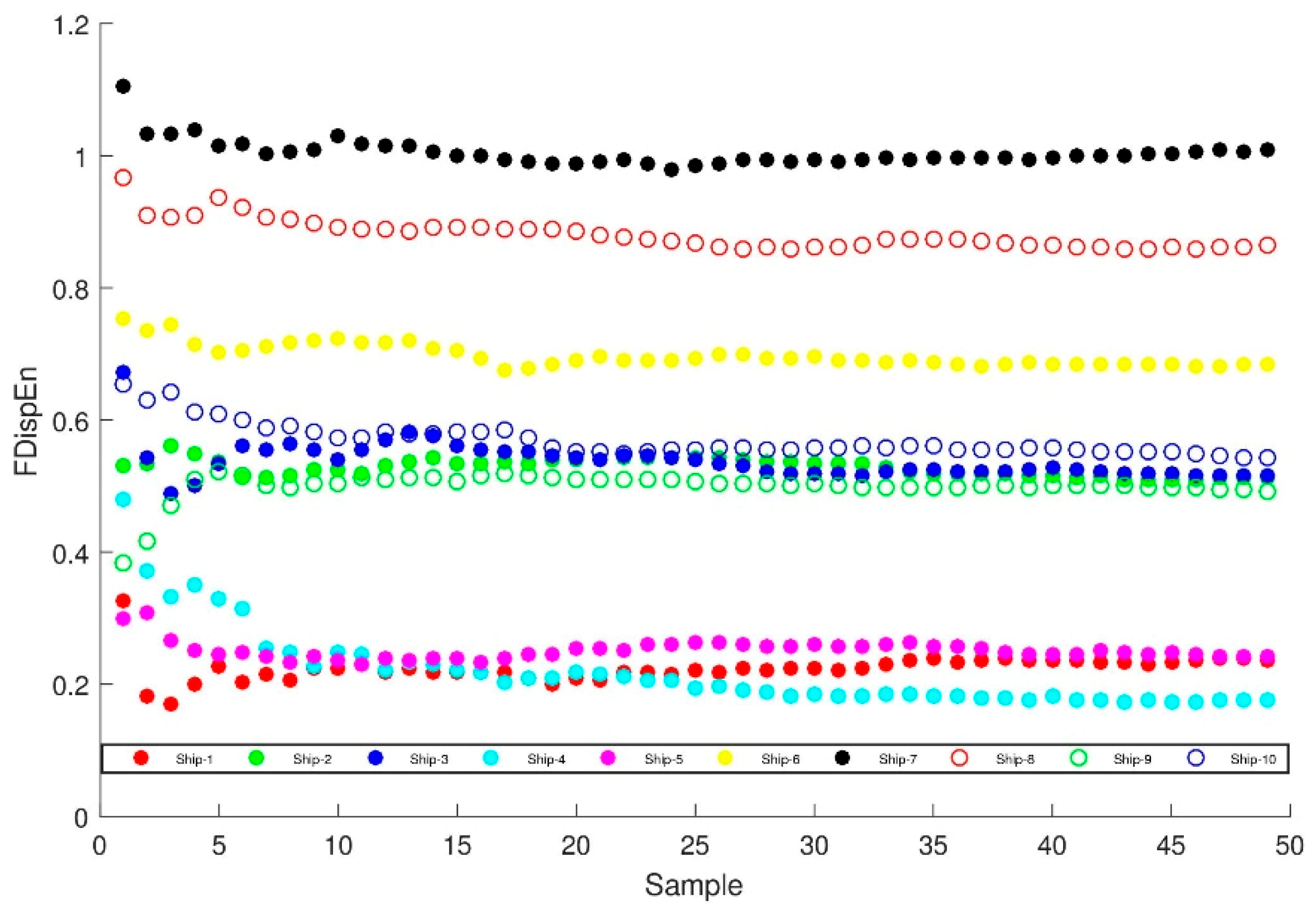
- Compare the fluctuation-based dispersion entropy of ship-radiated noise without ITD decomposition, so as to realize the feature extraction of ship-radiated noise complexity.
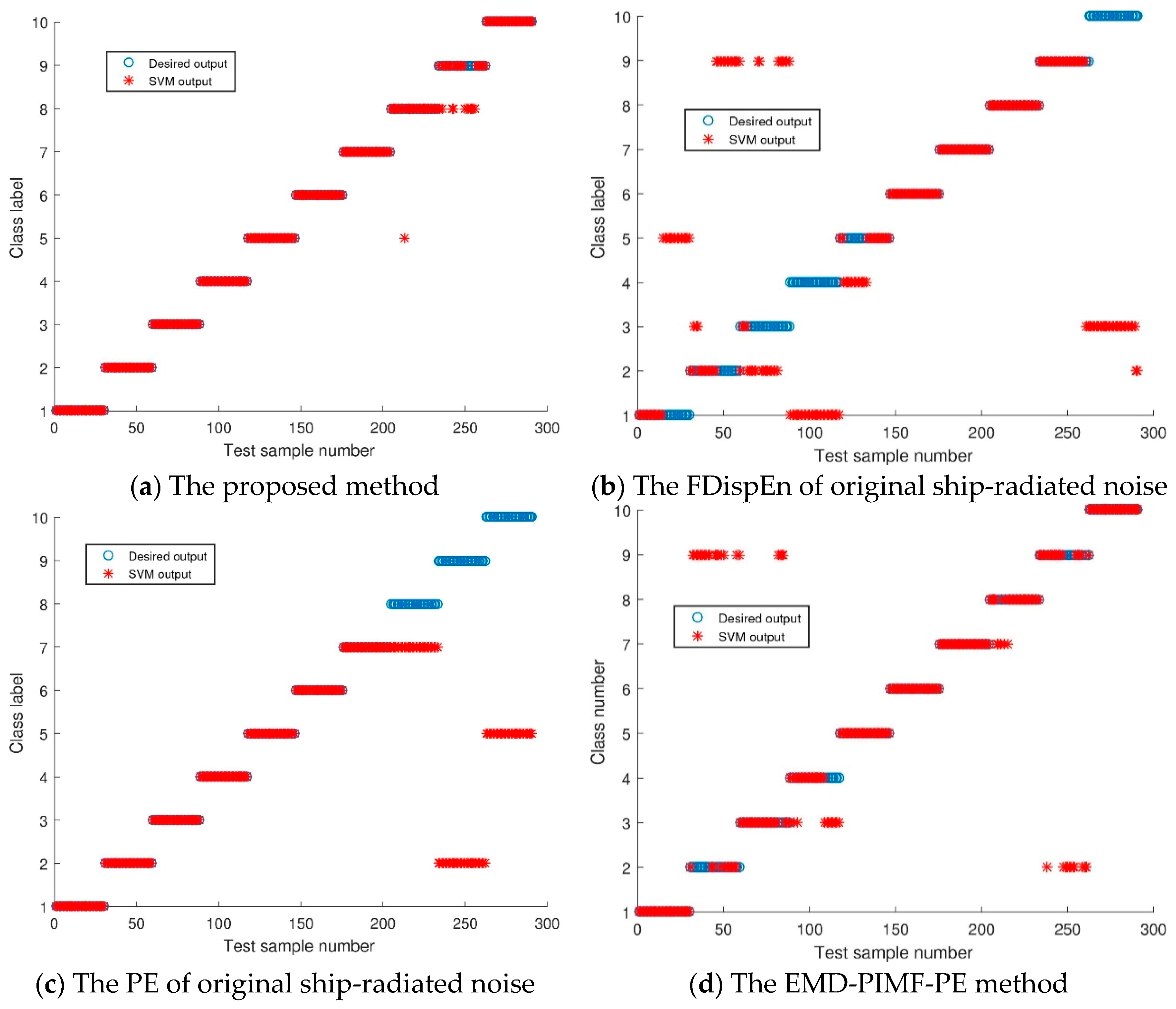
- The result of Step 2 as the feature vector is input into the support vector machine for classification to verify the effectiveness of this method.
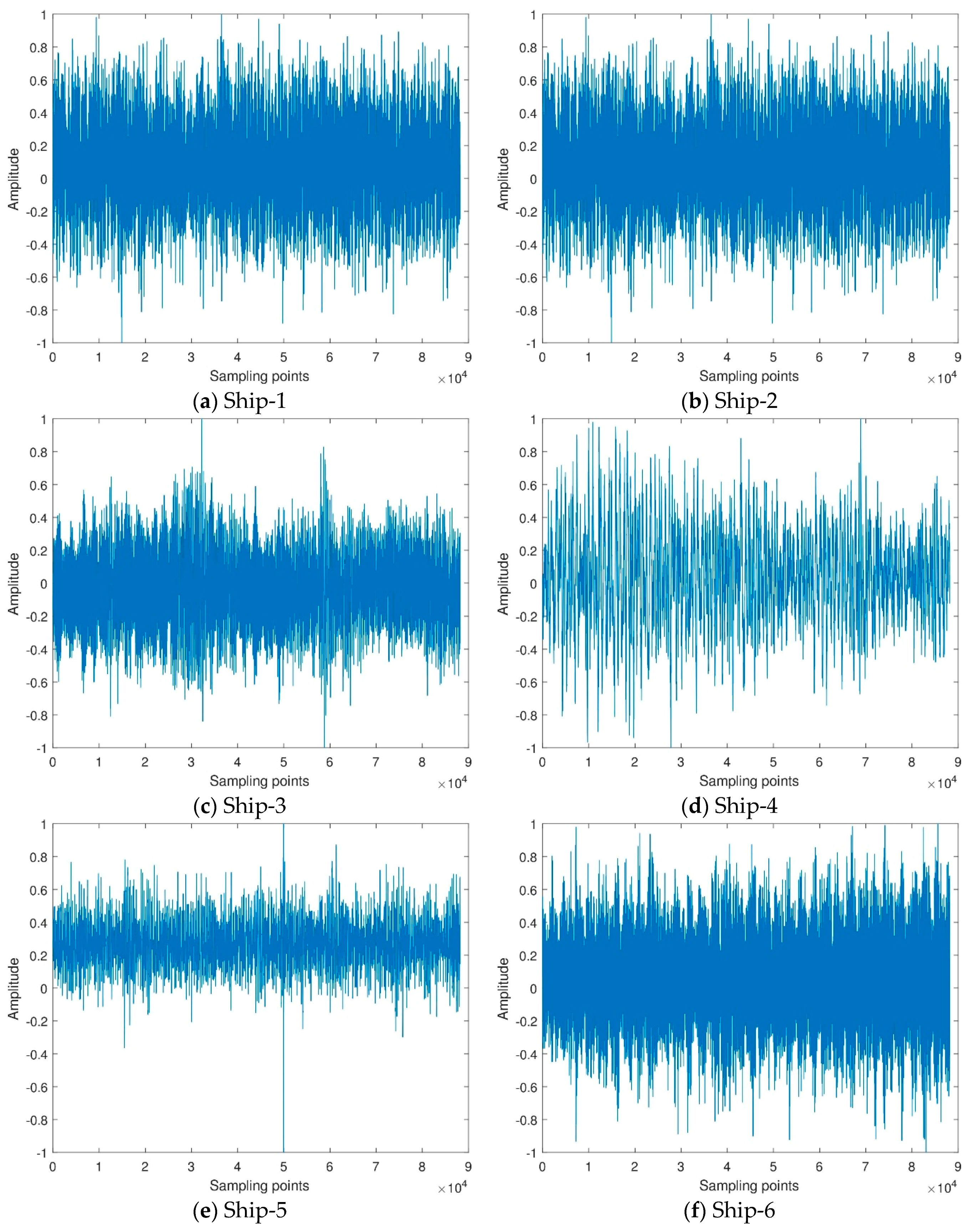
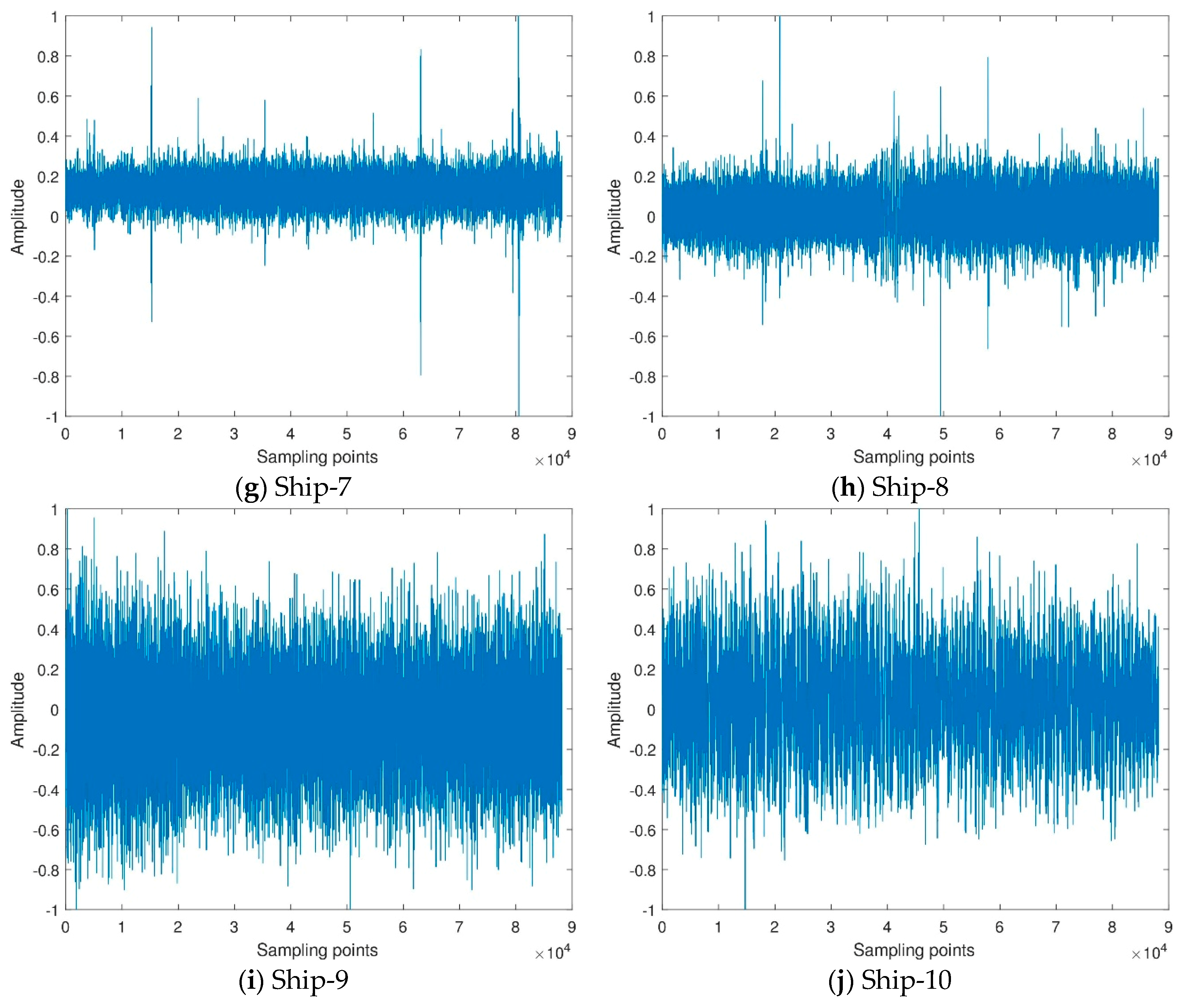
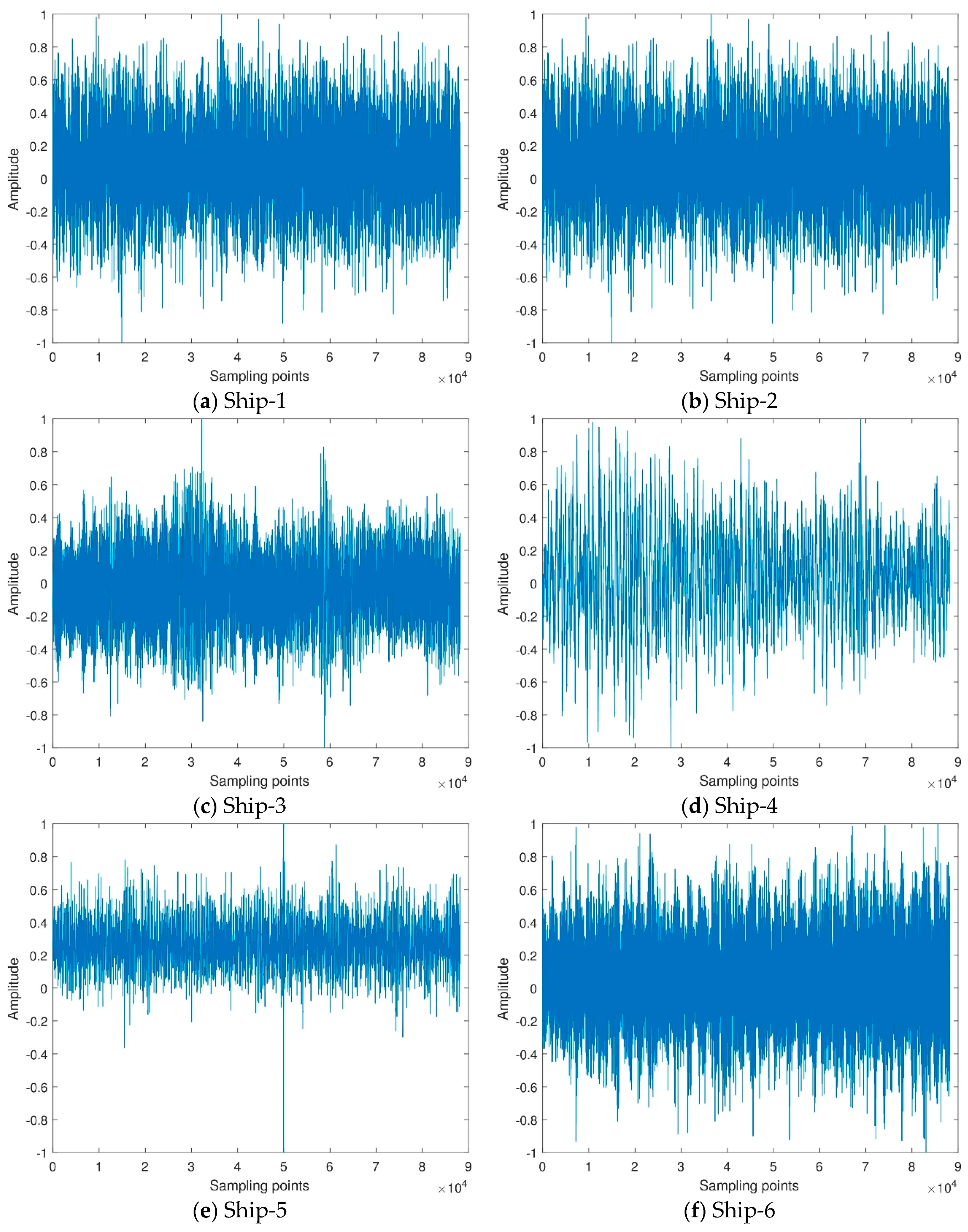
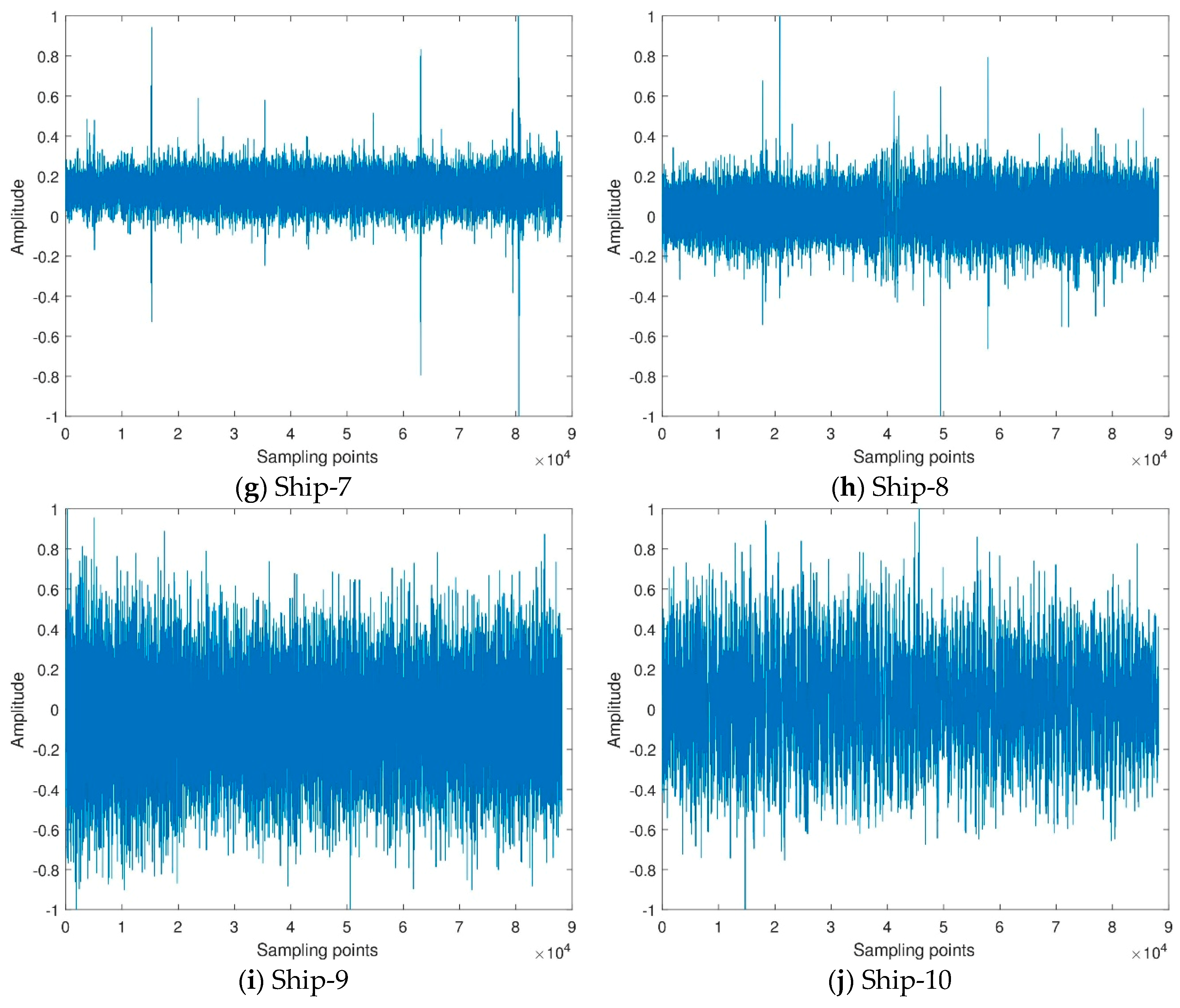
3.2. Application
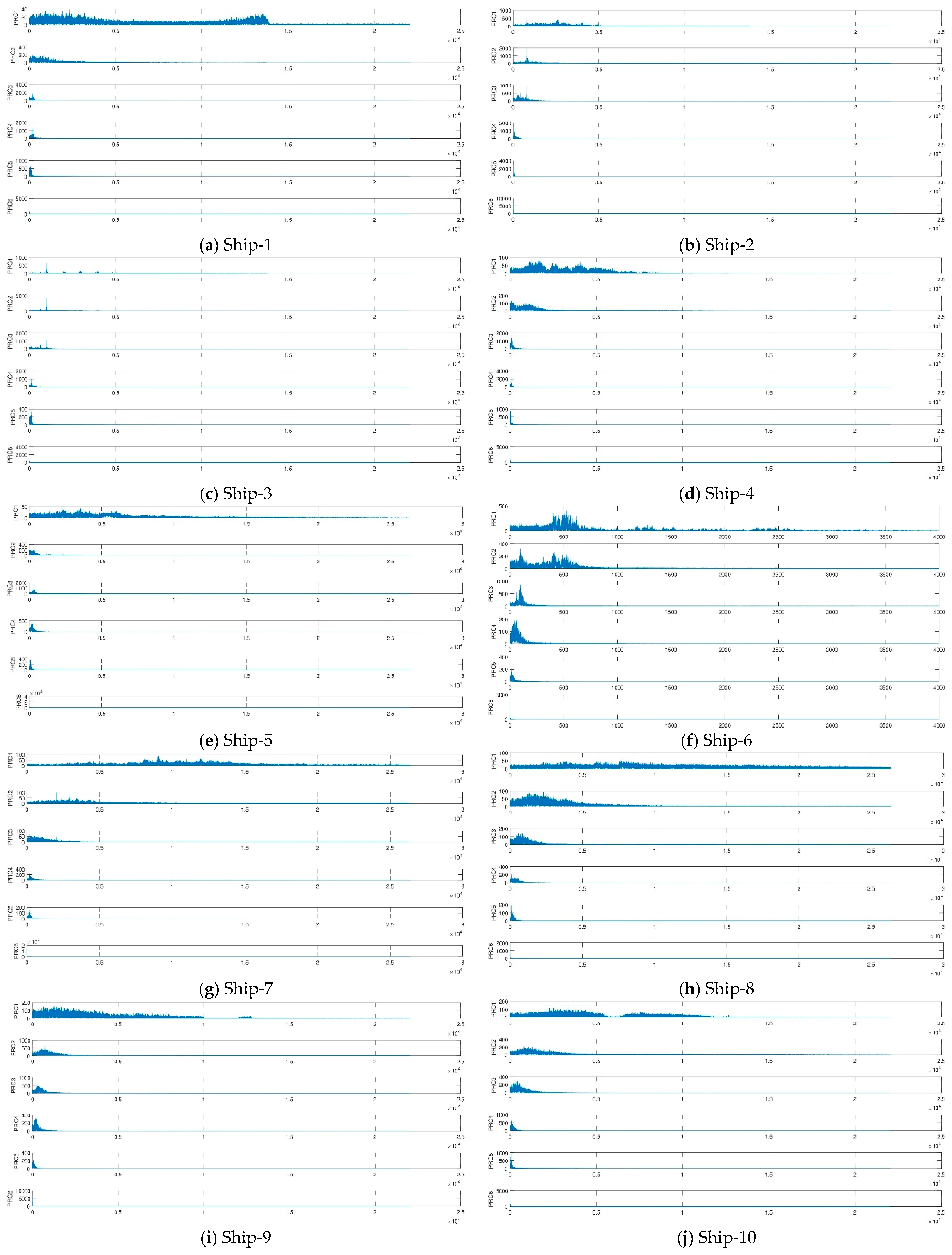
3.2.1. Analysis of Ship-Radiated Noise Using ITD
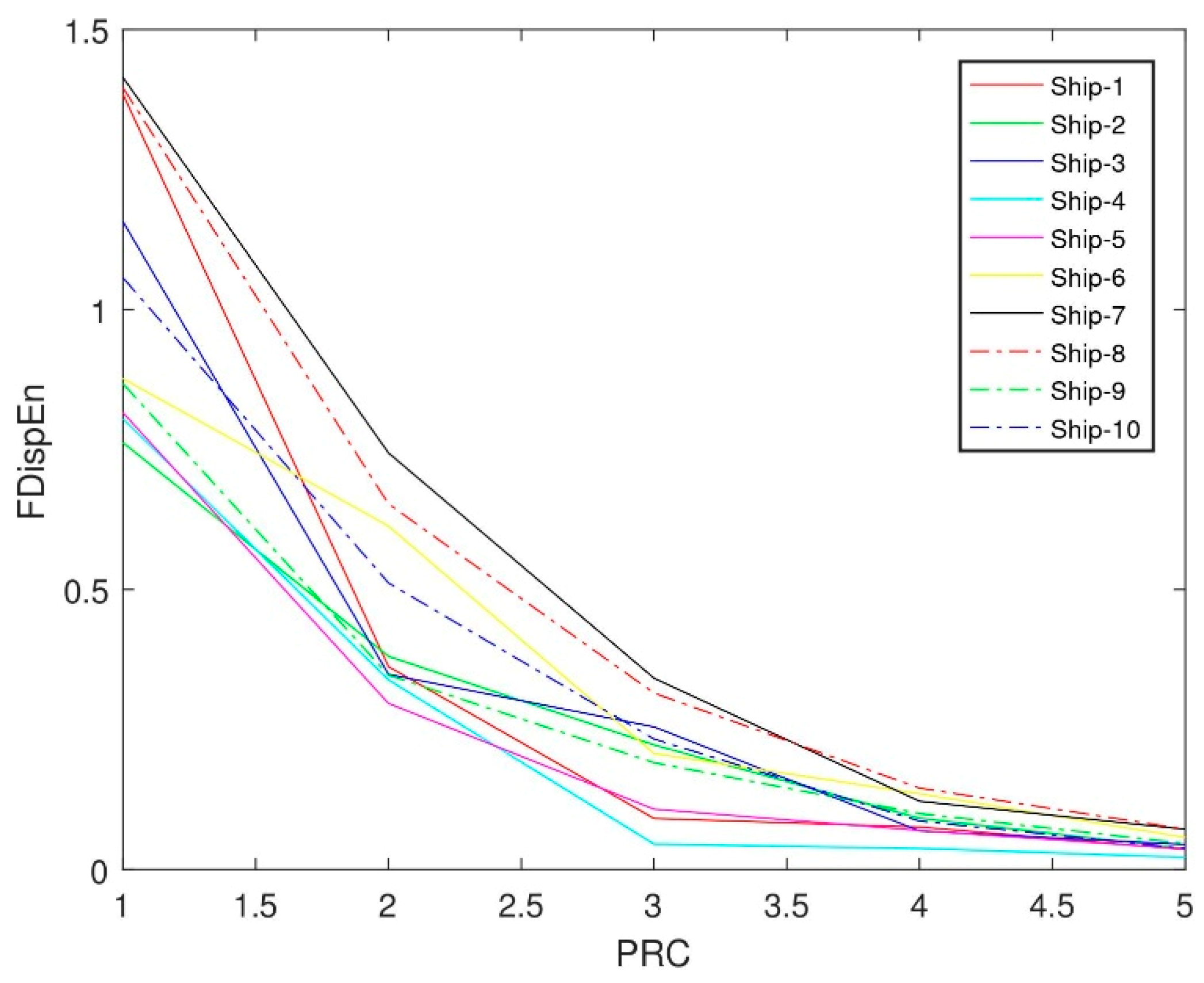
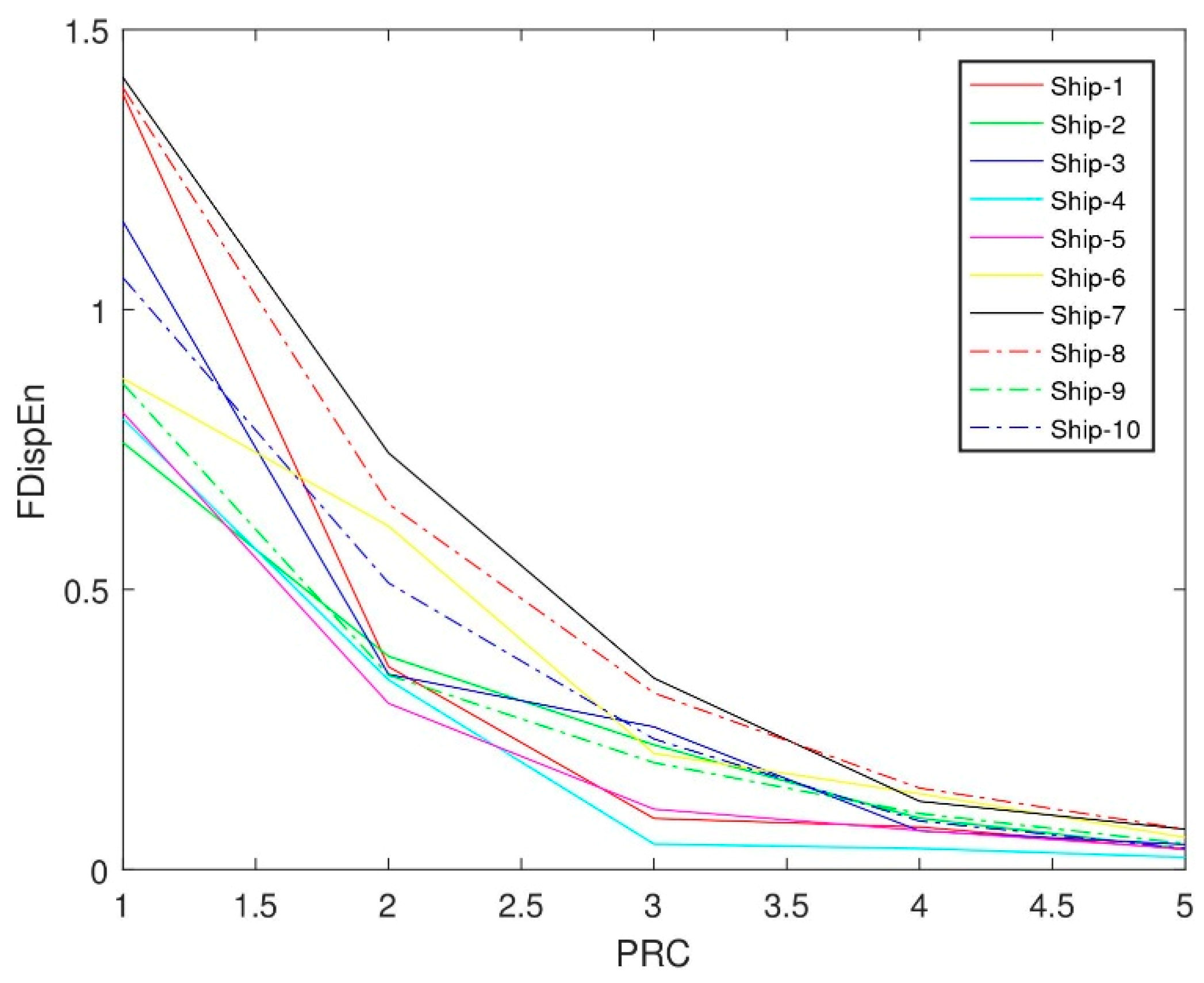
3.2.2. Fluctuation-Based Dispersion Entropy of Each Order PRC
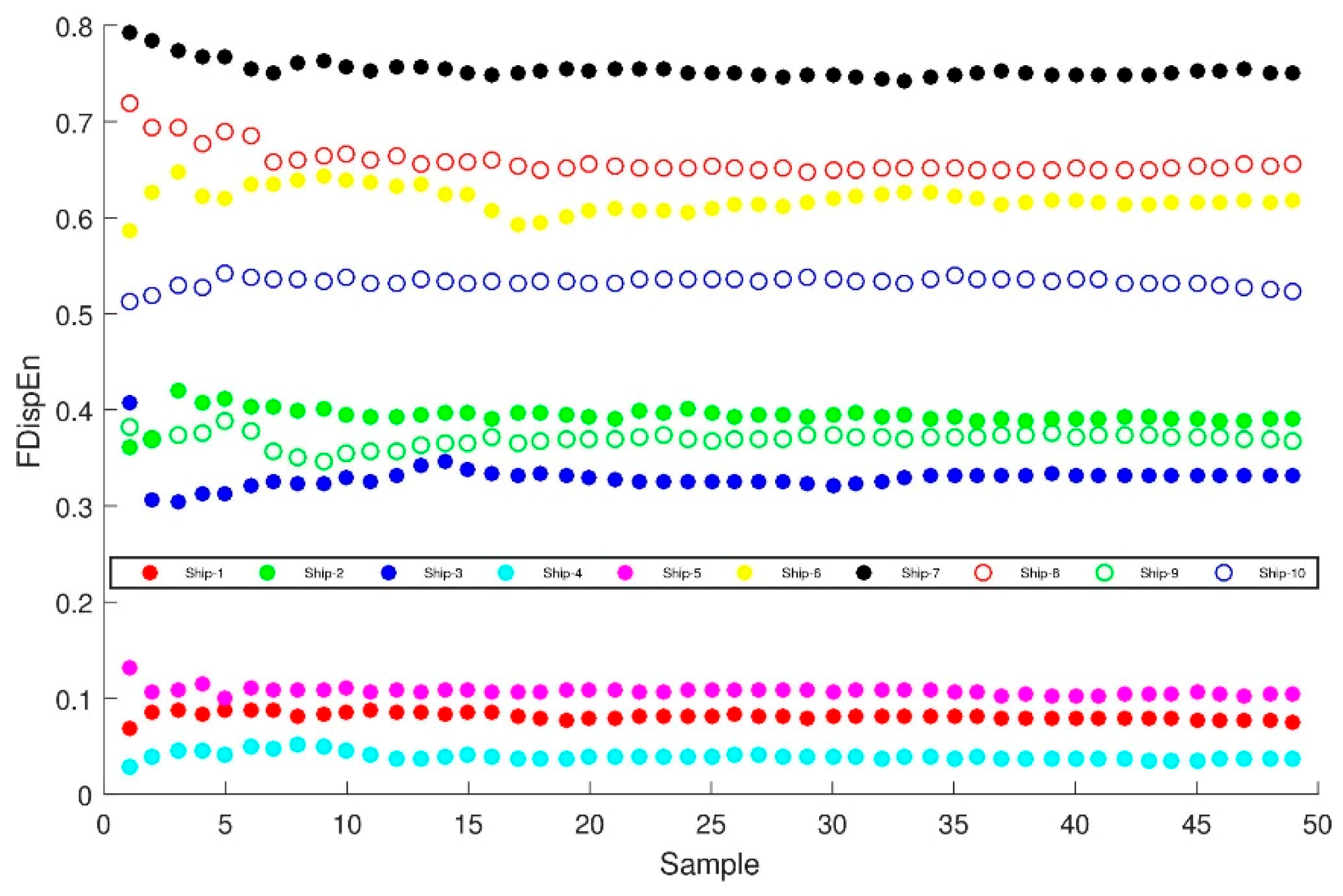
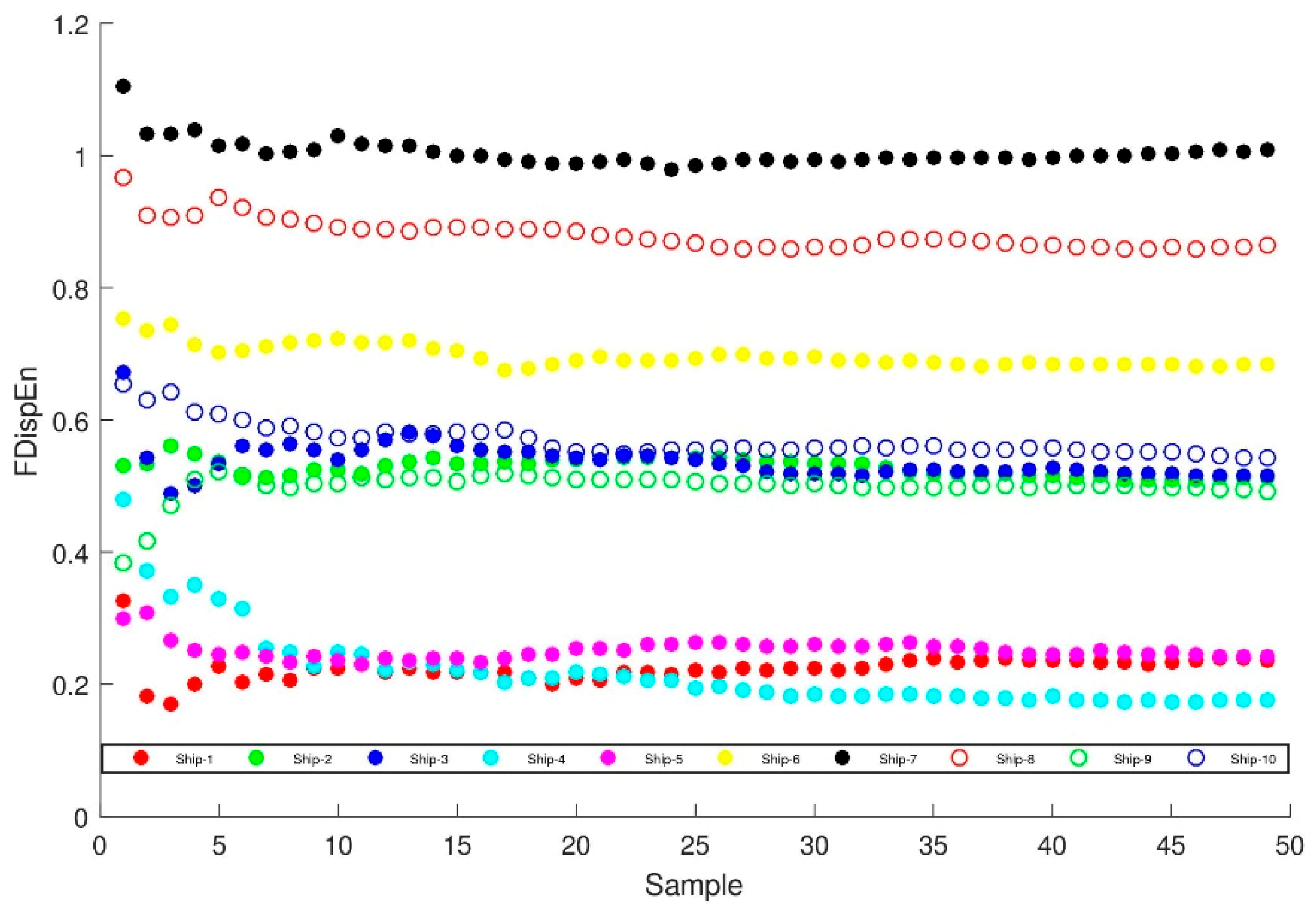
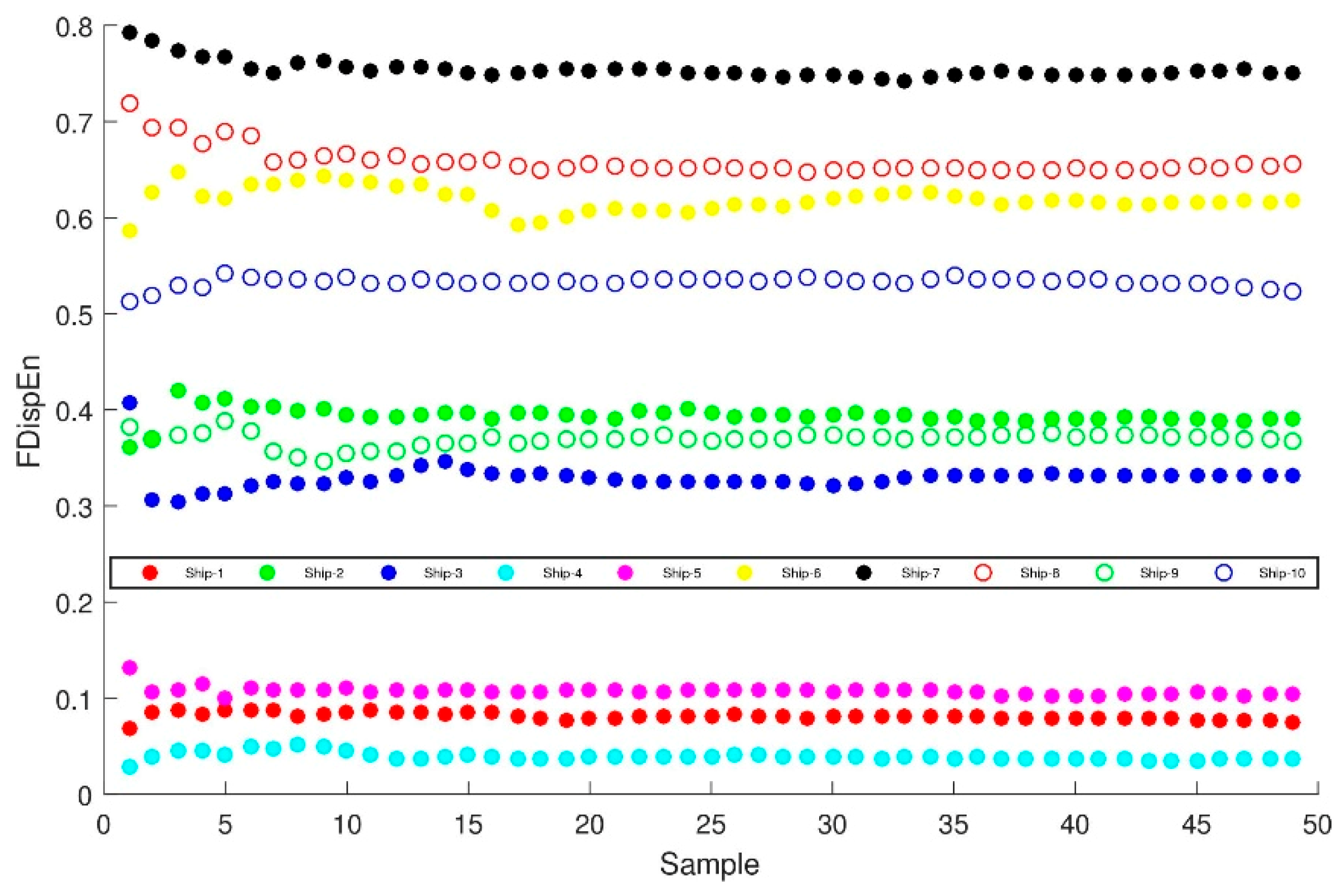
3.2.3. The Fluctuation-Based Dispersion Entropy of PRCs with the Highest Correlation Coefficient
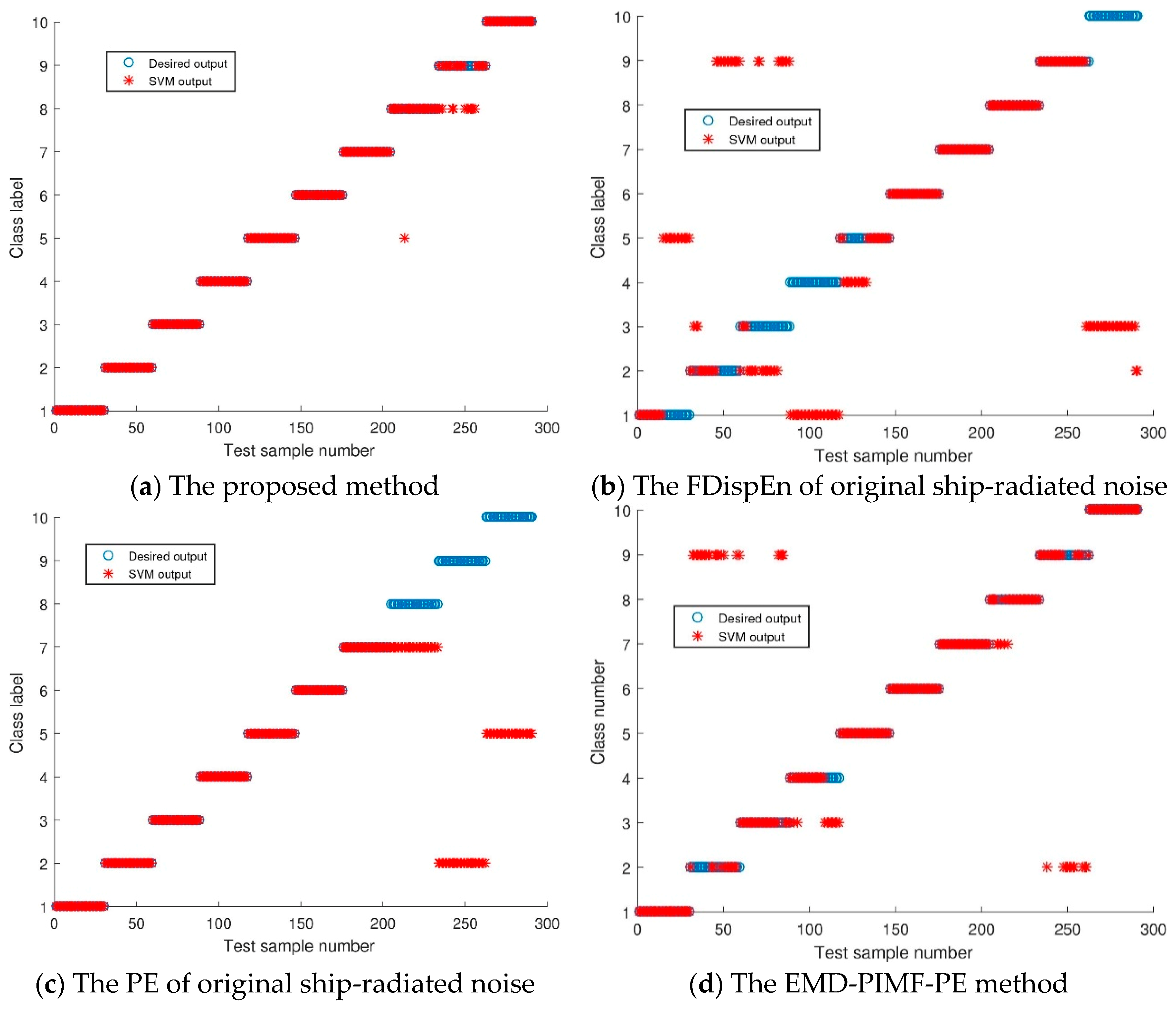
4. Comparison of Feature Extraction Methods of Ship-Radiated Noise
5. Classification
6. Conclusions
- ITD method as a novel signal decomposition is introduced. ITD method accurately extract the dynamic characteristics of non-stationary signal with fewer numbers of iterations and a small edge effect such that it is capable of online processing in real time. It was first applied to underwater acoustic signal decomposition.
- Simulation experiments demonstrate that the fluctuation-based dispersion entropy has the advantage of introducing class division and alignment, making it more robust when dealing with noisy signals compared with SampEn and PE. Therefore, this paper applied the fluctuation-based dispersion entropy to underwater acoustic signal processing.
- Analysis of the separability of the fluctuation-based dispersion entropy of each order PRC, it is often the case that only one PRC with the principal features is selected for feature extraction. In this paper, the entropy is weighted by the highest correlation coefficient, so the importance of each PRC is considered.
- The method proposed in this paper can extract the characteristics of ship-radiated noise more precisely and comprehensively. The classification recognition rate for ten types of ship-radiated noise signals is 95.8763%.
Author Contributions
Funding
Conflicts of Interest
References
- Yan, Z.; Li, Y. Application of principal component analysis to ship-radiated noise classification and recogniion. Appl. Acoust. 2009, 28, 20–26. [Google Scholar]
- Zhang, X.H.; Wang, J.C.; Lin, L.J. Feature extraction of ship-radiated noises based on wavelet transform. Acta Acust. 1997, 22, 139–144. [Google Scholar]
- Sweldens, W. The Lifting Scheme: A construction of second generation wavelets. SIAM J. Math. Anal. 1998, 29, 511–546. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. A study of the characteristics of white noise using the empirical mode decomposition method. Proc. R. Soc. A: Math. Phys. Eng. Sci. 2004, 460, 1597–1611. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise assisted dataanalysis method Center for Ocean land Atmosphere Studies. Tech. Rep. 2006, 1, 1–41. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Chen, X. Ships’radiated noise feature extraction based on EEMD. J. Vib. Shock 2017, 36, 114–119. [Google Scholar]
- Chen, J.-S.; Wang, J.; Gui, L. An improved EEMD method and its application in rolling bearing fault diagnosis. J. Vib. Shock 2018, 37, 51–56. [Google Scholar]
- Imani, M.; Ghoreishi, S.F.; Braga-Neto, U.M. Bayesian Control of Large MDPs with Unknown Dynamics in Data-Poor Environments. In Proceedings of the 32nd International Conference on Neural Information Processing Systems, Montréal, QC, Canada, 3–8 December 2018. [Google Scholar]
- Imani, M.; Ghoreishi, S.F.; Allaire, D.; Braga-Neto, U. MFBO-SSM: Multi-Fidelity Bayesian Optimization for Fast Inference in State-Space Models; Association for the Advancement of Artificial Intelligence: Menlo Park, CA, USA, 2019. [Google Scholar]
- Martis, R.J.; Acharya, U.R.; Tan, J.H.; Petznick, A.; Tong, L.; Chua, C.K.; Ng, E.Y.K. Application of intrinsic time-scale decomposition (ITD) to EEG signals for automated seizure prediction signals for automated seizure prediction. Int. J. Neural Syst. 2013, 23. [Google Scholar] [CrossRef]
- Wang, D.-J.; Liu, Z.-W.; Wei, J.; Wang, W.; Nie, Z.-S. Method to correct atmospheric pressure effects based on ensemble empirical mode decomposition. Chin. J. Geophys. 2018, 61, 504–520. [Google Scholar]
- Gao, Y.-C. A Research on Application of Hilbert-Huang Transform in the Underwater Acoustic Signal Processing. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2009. [Google Scholar]
- De Araujo, D.B.; Tedeschi, W.; Santos, A.C.D.; Elias, J., Jr.; Neves, U.P.; Baffa, O. Shannon entropy applied to the analysis of event-related fMRI time series. NeuroImage 2003, 20, 311–317. [Google Scholar] [CrossRef]
- Zhao, Z.H.; Yang, S.P. Sample Entropy Based Roller Bearing Fault Diagnosis Method. J. Vib. Shock 2012, 31, 136–140. [Google Scholar]
- Li, Y.; Wang, L.; Li, X.; Yang, X. A Novel Linear Spectrum Frequency Feature Extraction Technique for Warship Radio Noise Based on Complete Ensemble Empirical Mode Decomposition with Adaptive Noise, Duffing Chaotic Oscillator, and Weighted-Permutation Entropy. Entropy 2019, 21, 507. [Google Scholar] [CrossRef]
- Li, Y.; Chen, X.; Yu, J.; Yang, X. A Fusion Frequency Feature Extraction Method for Underwater Acoustic Signal Based on Variational Mode Decomposition, Duffing Chaotic Oscillator and a Kind of Permutation Entropy. Electronics 2019, 8, 61. [Google Scholar] [CrossRef]
- Rostaghi, M.; Azami, H. Dispersion Entropy: A Measure for Time Series Analysis. IEEE Signal Process. Lett. 2016, 23, 610–614. [Google Scholar] [CrossRef]
- Azami, H.; Escudero, J. Amplitude- and Fluctuation-Based Dispersion Entropy. Entropy 2018, 20, 210. [Google Scholar] [CrossRef]
- Frei, M.G.; Osorio, I. Intrinsic time-scale decomposition: Time–frequency–energy analysis and real-time filtering of non-stationary signals. Proc. R. Soc. A Math. Phys. Eng. Sci. 2007, 463, 321–342. [Google Scholar] [CrossRef]
- Dagher, I.; Azar, F. Improving the SVM gender classification accuracy using clustering and incremental learning. Expert Syst. 2019, 36, e12372. [Google Scholar] [CrossRef]
- Li, Y.-X.; Li, Y.-A.; Chen, Z.; Chen, X. Feature Extraction of Ship-Radiated Noise Based on Permutation Entropy of the Intrinsic Mode Function with the Highest Energy. Entropy 2016, 18, 393. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order | Ship-1 | Ship-2 | Ship-3 | Ship-4 | Ship-5 | Ship-6 | Ship-7 | Ship-8 | Ship-9 | Ship-10 |
|---|---|---|---|---|---|---|---|---|---|---|
| PRC2 | 0.4754 | 0.7200 | 0.7637 | 0.3532 | 0.5062 | 0.6947 | 0.5545 | 0.6679 | 0.8094 | 0.5749 |
| PRC3 | 0.7777 | 0.5563 | 0.5489 | 0.752 | 0.8388 | 0.6541 | 0.5006 | 0.6401 | 0.7203 | 0.5726 |
| PRC4 | 0.7891 | 0.3765 | 0.4537 | 0.777 | 0.6489 | 0.2646 | 0.5288 | 0.5063 | 0.3332 | 0.5719 |
| PRC5 | 0.1341 | 0.3501 | 0.2130 | 0.4045 | 0.2193 | 0.0176 | 0.3718 | 0.3246 | 0.0482 | 0.5568 |
| PRC6 | 0.0303 | 0.1105 | 0.0882 | 0.0589 | 0.0187 | 0.0049 | 0.1372 | 0.0217 | 0.0038 | 0.3191 |
| Parameter | Ship-1 | Ship-2 | Ship-3 | Ship-4 | Ship-5 | Ship-6 | Ship-7 | Ship-8 | Ship-9 | Ship-10 |
|---|---|---|---|---|---|---|---|---|---|---|
| The order of PRC with the highest correlation coefficient | PRC4 | PRC2 | PRC2 | PRC4 | PRC3 | PRC2 | PRC2 | PRC2 | PRC2 | PRC2 |
| Fluctuation-based dispersion entropy | 0.0759 | 0.3807 | 0.3485 | 0.0376 | 0.1078 | 0.6134 | 0.7440 | 0.6528 | 0.3471 | 0.5117 |
| Parameter | Ship-1 | Ship-2 | Ship-3 | Ship-4 | Ship-5 | Ship-6 | Ship-7 | Ship-8 | Ship-9 | Ship-10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Mean1 | 0.2240 | 0.5282 | 0.5374 | 0.2188 | 0.2513 | 0.6972 | 1.0039 | 0.8806 | 0.4996 | 0.5693 |
| Std1 | 0.0209 | 0.0129 | 0.0276 | 0.0621 | 0.0143 | 0.0175 | 0.0196 | 0.0224 | 0.0227 | 0.0252 |
| Rang1 | 0.1693~0.3277 | 0.5087~0.5620 | 0.4872~0.6716 | 0.173~0.4801 | 0.2314~0.3097 | 0.6764~0.7538 | 0.9799~1.1043 | 0.8576~0.9662 | 0.382~0.522 | 0.542~0.6552 |
| Mean2 | 0.0808 | 0.3939 | 0.3294 | 0.039 | 0.1072 | 0.6185 | 0.7540 | 0.6583 | 0.3694 | 0.5329 |
| Std2 | 0.0037 | 0.0085 | 0.0138 | 0.004 | 0.0044 | 0.0125 | 0.0094 | 0.0145 | 0.0073 | 0.0051 |
| Range2 | 0.0687~0.088 | 0.3621~0.4199 | 0.3035~0.4078 | 0.0286~0.0509 | 0.0995~0.1319 | 0.5871~0.6468 | 0.7431~0.7920 | 0.6482~0.7195 | 0.3473~0.3894 | 0.5126~0.5428 |
| Methods | Accuracy Rate |
|---|---|
| The proposed method | 95.8763% |
| The FDispEn of original ship-radiated noise | 54.2955% |
| The PE of original ship-radiated noise | 70.1031% |
| The EMD-PIMF-PE method | 83.1615% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Li, Y.; Zhang, K. A Feature Extraction Method of Ship-Radiated Noise Based on Fluctuation-Based Dispersion Entropy and Intrinsic Time-Scale Decomposition. Entropy 2019, 21, 693. https://doi.org/10.3390/e21070693
Li Z, Li Y, Zhang K. A Feature Extraction Method of Ship-Radiated Noise Based on Fluctuation-Based Dispersion Entropy and Intrinsic Time-Scale Decomposition. Entropy. 2019; 21(7):693. https://doi.org/10.3390/e21070693
Chicago/Turabian StyleLi, Zhaoxi, Yaan Li, and Kai Zhang. 2019. "A Feature Extraction Method of Ship-Radiated Noise Based on Fluctuation-Based Dispersion Entropy and Intrinsic Time-Scale Decomposition" Entropy 21, no. 7: 693. https://doi.org/10.3390/e21070693
APA StyleLi, Z., Li, Y., & Zhang, K. (2019). A Feature Extraction Method of Ship-Radiated Noise Based on Fluctuation-Based Dispersion Entropy and Intrinsic Time-Scale Decomposition. Entropy, 21(7), 693. https://doi.org/10.3390/e21070693