Representation and Characterization of Nonstationary Processes by Dilation Operators and Induced Shape Space Manifolds


Abstract
1. Introduction
2. The Structure of Semi-Positive-Definite Matrices and the Dilation Theory
2.1. Outline of the Dilation Theory
- there exists a larger space from which the original function (or matrix) is deduced;
- we can choose the “dilated” function to be simpler. For instance, when dealing with matrices, each of its coefficients can be expressed as the projection of a larger unitary matrix. In this case, we obtain a unitary dilation. This approach has been for example developed in [34,35,36] for the stationary dilation of periodically-correlated processes.
2.1.1. Dilation and Rotation of Contractions
2.1.2. Dilation and Isometries
2.1.3. Dilation and Measure
2.2. Construction of Dilation Matrices
- The operator is positive
- There exists a unique contraction Γ in such that
- for all k
- there exists a family of contraction such thatwhere is the Cholesky’s square-root of .
- If is a semi-positive definite complex-valued Toeplitz kernel, then all the are complex-valued and respect . The structure and the construction procedure for obtaining such a complex-valued parameter is identical whether the kernel is real or complex.
- The framework proposed by Constantinescu and recalled previously is quite general and can be extended to Matrix Orthogonal Polynomial on the Unit Circle (MOPUC) development. By referring to ([43], Section 3.1), matrix polynomials stem from a Szëgo recursion akin to the scalar case and thus provide a sequence of Verblunsky coefficients, or parcors that are matrices. Again in ([43], Section 3.11), a correspondence between MOPUC and CMV matrices [13] is provided, which are equivalent to dilation matrices. The construction procedure remains the same for the dilation matrices, but the parcors become in that case matrices (they are matrix-valued Verblunsky coefficients), which can be obtained by a matrix version of the Schur/Geronimus algorithm [44].
3. Analysis of Curves on a Manifold Induced by the Dilation
3.1. Preliminaries on Lie Groups
- The geodesics through e (the identity element) are the integral curves , that is, the one-parameter groups. In addition, because left and right are isometries and isometries maps geodesics to geodesics, the geodesics through any point are the left (right) translates of the geodesics through eOf course, we have
- The Levi-Civita connection is given by :
3.2. Basic Outline of Geometry
3.3. Metric and Distance over and
3.4. The Geodesic Equation
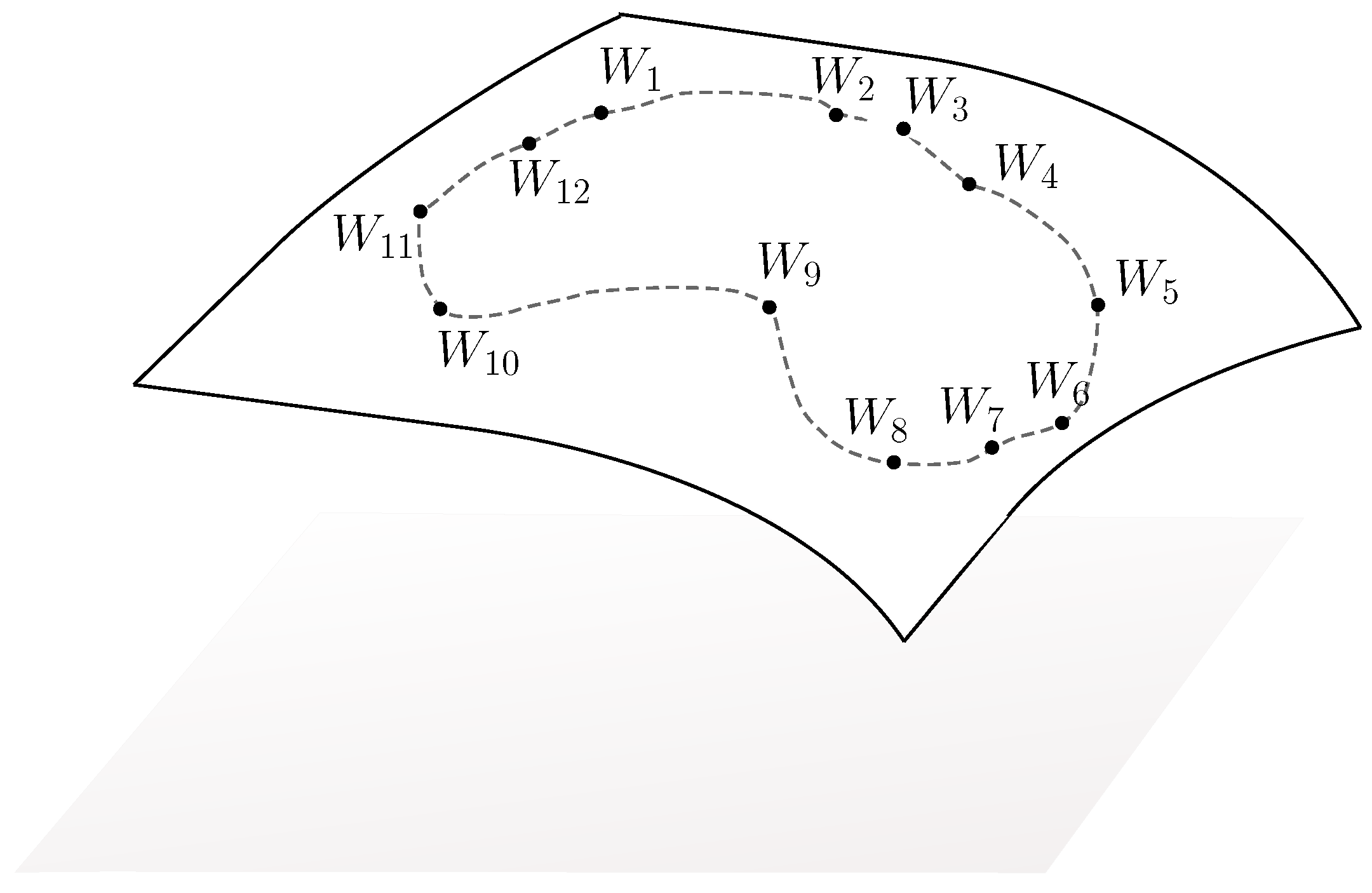
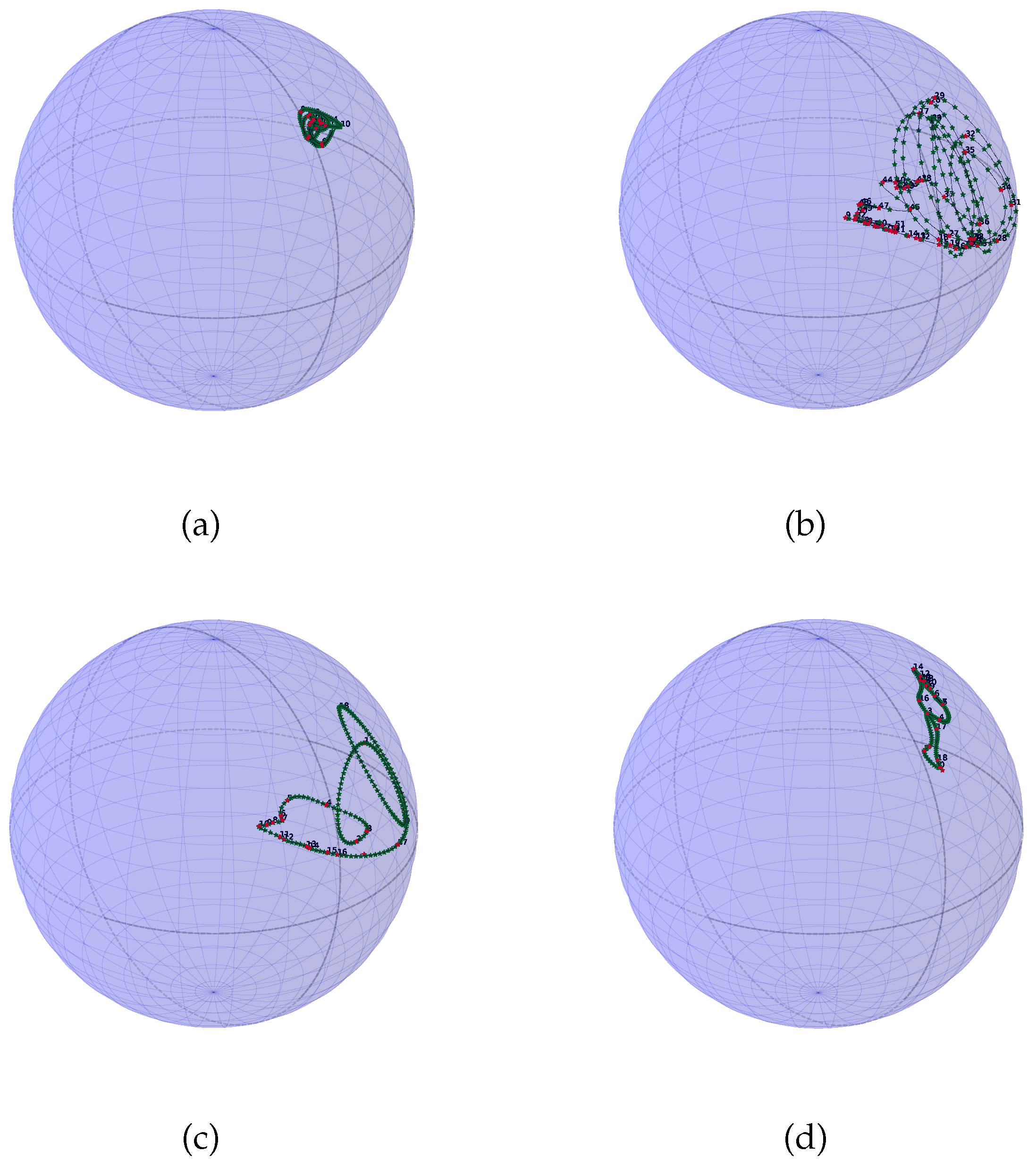
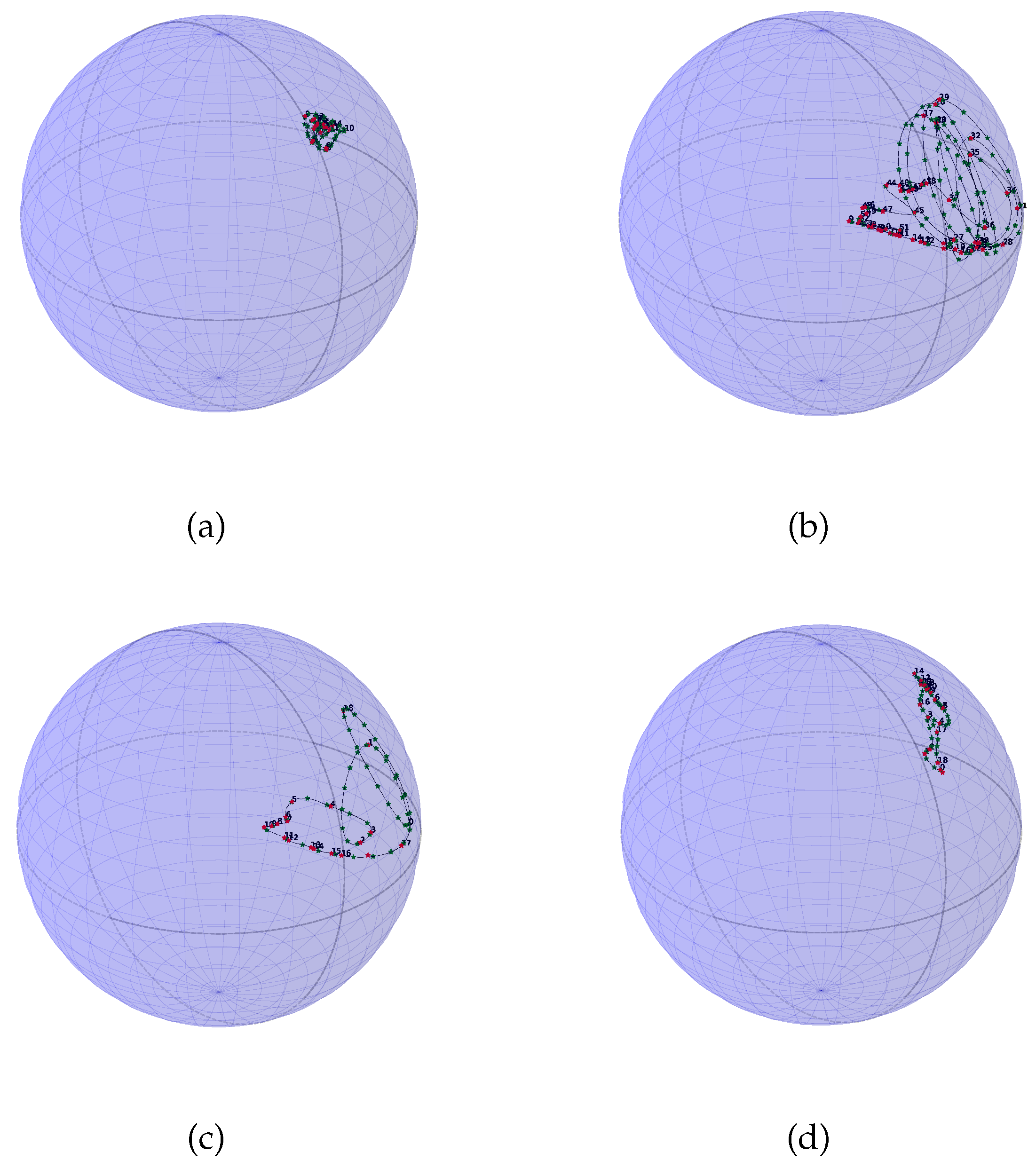
- Input: a set of rotation matrices , seen as a partial observation of a closed trajectory on .
- Map the set of matrices into the a set of matrices in the Lie algebra using the inverse exponential map.
- Go back in the base manifold with the exponential map.
- Shift the interpolated curve in order to fulfill the condition and compute the SRV transformation given by (41)
- Compute the distance defined by (38). The optimization is carried out by dynamic programming.
- Output: distance between two curves in the manifold defined by the set of curves in , and geodesic path between the curves.
3.5. Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Defect Operator, Elementary Rotation
- There exists a contraction Γ in z such that ,
- .
- The operator in is a contraction
- is a contraction and, for , there exists uniquely determined contractions such that .
Appendix B. Geodesic Equation in the Space of Curve
References
- Auger, F.; Flandrin, P.; Lin, Y.-T.; McLaughlin, S.; Meignen, S.; Oberlin, T.; Wu, H.-T. Time-Frequency Reassignment and Synchrosqueezing: An Overview. IEEE Signal Process. Mag. 2013, 30, 32–41. [Google Scholar] [CrossRef]
- Flandrin, P. Time-Frequency/Time-Scale Analysis; Academic Press: Cambridge, MA, USA, 1999; Volume 10. [Google Scholar]
- Hurd, H.L.; Miamee, A. Periodically Correlated Random Sequences: Spectral Theory and Practice; Wiley Series in Probability and Statistics; John Wiley: Hoboken, NJ, USA, 2007. [Google Scholar]
- Napolitano, A. Cyclostationarity: New trends and applications. Signal Process. 2016, 120, 385–408. [Google Scholar] [CrossRef]
- Dégerine, S.; Lambert-Lacroix, S. Characterization of the partial autocorrelation function of nonstationary time series. J. Multivar. Anal. 2003, 87, 46–59. [Google Scholar] [CrossRef]
- Lambert-Lacroix, S. Extension of Autocovariance Coefficients Sequence for Periodically Correlated Processes. J. Time Ser. Anal. 2005, 26, 423–435. [Google Scholar] [CrossRef]
- Desbouvries, F. Unitary Hessenberg and state-space model based methods for the harmonic retrieval problem. IEE Proc. Radar Sonar Navig. 1996, 143, 346–348. [Google Scholar] [CrossRef]
- Yang, L.; Arnaudon, M.; Barbaresco, F. Riemannian median, geometry of covariance matrices and radar target detection. In Proceedings of the 7th European Radar Conference, Paris, France, 30 September–1 October 2010; pp. 415–418. [Google Scholar]
- Bingham, N.H. Szego’s Theorem and Its Probabilistic Descendants. Prob. Surv. 2012, 9, 287–324. [Google Scholar] [CrossRef]
- Simon, B. Orthogonal Polynomials on the Unit Circle Part 1 and Part 2; American Mathematical Society: Providence, RI, USA, 2009; Volume 54. [Google Scholar]
- Delsarte, P.; Genin, Y.V.; Kamp, Y.G. Orthogonal polynomial matrices on the unit circle. IEEE Trans. Circuits Syst. 1978, 25, 149–160. [Google Scholar] [CrossRef]
- Barbaresco, F. Radar micro-Doppler Signal Encoding in Siegle Unit Poly-Disk for Machine Learning in Fisher Metric Space. In Proceedings of the 2018 19th International Radar Symposium (IRS), Bonn, Germany, 20–22 June 2018. [Google Scholar]
- Simon, B. CMV matrices: Five years after. J. Comput. Appl. Math. 2007, 208, 120–154. [Google Scholar] [CrossRef]
- Ammar, G.; Gragg, W.; Reichel, L. Constructing a Unitary Hessenberg Matrix from Spectral Data; Springer: Berlin, Germany, 1991; pp. 385–395. [Google Scholar]
- Masani, P. Dilations as Propagators of Hilbertian Varieties. SIAM J. Math. Anal. 1978, 9, 414–456. [Google Scholar] [CrossRef]
- Constantinescu, T. Schur Parameters, Factorization and Dilation Problems; Birkhäuser: Basel, Switzerland, 1995. [Google Scholar]
- Nagy, B.S.; Foias, C.; Bercovici, H.; Kérchy, L. Harmonic Analysis of Operators on Hilbert Space; Springer: New York, NY, USA, 2010. [Google Scholar]
- Arsene, G.; Constantinescu, T. The Structure of the Naimark Dilation and Gaussian Stationary Processes. Integral Equ. Oper. Theory 1985, 8, 181–204. [Google Scholar] [CrossRef]
- Arnaudon, M.; Barbaresco, F.; Yang, L. Riemannian Medians and Means With Applications to Radar Signal Processing. IEEE J. Sel. Top. Signal Process. 2013, 7, 595–604. [Google Scholar] [CrossRef]
- Barbaresco, F. Interactions between symmetric cone and information geometries: Bruhat-tits and siegel spaces models for high resolution autoregressive doppler imagery. In Emerging Trends in Visual Computing; Springer: Berlin, Germany, 2009; pp. 124–163. [Google Scholar]
- Desbouvries, F. Geometrical Aspects of Linear Prediction Algorithms. Available online: http://www.math.ucsd.edu/helton/MTNSHISTORY/CONTENTS/2000PERPIGNAN/CDROM/articles/B85.pdf (accessed on 9 September 2018).
- Desbouvries, F. Non-euclidean geometrical aspects of the schur and levinson-szego algorithms. IEEE Trans. Inf. Theory 2003, 49, 1992–2003. [Google Scholar] [CrossRef]
- Balaji, B.; Barbaresco, F.; Decurninge, A. Information geometry and estimation of Toeplitz covariance matrices. In Proceedings of the 2014 International Radar Conference, Lille, France, 13–17 October 2014; pp. 1–4. [Google Scholar]
- Barbaresco, F. Geometric Radar Processing based on Fréchet distance: Information geometry versus Optimal Transport Theory. In Proceedings of the 2011 12th International Radar Symposium (IRS), Leipzig, Germany, 7–9 September 2011; pp. 663–668. [Google Scholar]
- Barbaresco, F. Information Geometry of Covariance Matrix: Cartan-Siegel Homogeneous Bounded Domains, Mostow/Berger Fibration and Fréchet Median. In Matrix Information Geometry; Springer: Berlin/Heidelberg, Germany, 2013; pp. 199–255. [Google Scholar]
- Lipeng, N.; Xianhua, J.; Georgiou, T. Geometric methods for structured covariance estimation. In Proceedings of the 2012 American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 1877–1882. [Google Scholar]
- Pennec, X. Intrinsic statistics on Riemannian manifolds: Basic tools for geometric measurements. J. Math. Imaging Vis. 2006, 25, 127–154. [Google Scholar] [CrossRef]
- Pennec, X.; Fillard, P.; Ayache, N. A Riemannian framework for tensor computing. Int. J. Comput. Vis. 2006, 66, 41–66. [Google Scholar] [CrossRef]
- Barbaresco, F.; Ruiz, M. Radar detection for nonstationary Doppler signal in one burst based on information geometry: Distance between paths on covariance matrices manifold. In Proceedings of the 2015 European Radar Conference (EuRAD), Paris, France, 9–11 September 2015; pp. 41–44. [Google Scholar]
- Le Brigant, A.; Arnaudon, M.; Barbaresco, F. Optimal Matching Between Curves in a Manifold. In Proceedings of the 2017 International Conference on Geometric Science of Information, Paris, France, 7–9 November 2017; pp. 57–64. [Google Scholar]
- Arnold, V. Sur la Géométrie Différentielle des Groupes de Lie de Dimension Infinie et Ses Applications à L’hydrodynamique des Fluides Parfaits. Annales de l’institut Fourier 1966, 319–361. (In French) [Google Scholar] [CrossRef]
- Kailath, T.; Bruckstein, A.M. Naimark Dilations, State-Space Generators and Transmission Lines. In Advances in Invariant Subspaces and Other Results of Operator Theory; Douglas, R.G., Pearcy, C.M., Nagy, B.S., Vasilescu, F.-H., Voiculescu, D., Arsene, G., Eds.; Birkhäuser: Basel, Switzerland, 1986; pp. 173–186. [Google Scholar]
- Sayed, A.H.; Constantinescu, T.; Kailath, T. Recursive Construction of Multichannel Transmission Lines with a Maximum Entropy Property. In Codes, Graphs, and Systems; Springer: Berlin, Germany, 2002; pp. 259–290. [Google Scholar]
- Makagon, A.; Salehi, H. Notes on infinite dimensional stationary sequences. In Probability Theory on Vector Spaces IV; Cambanis, S., Weron, A., Eds.; Lecture Notes in Mathematics; Springer: Berlin/Heidelberg, Germany, 1989; Volume 1391, pp. 200–238. [Google Scholar]
- Miamee, A. Spectral dilation of L(B,H)-valued measures and its application to stationary dilation for Banach space valued processes. Indiana Univ. Math. J. 1989, 38, 841–860. [Google Scholar] [CrossRef]
- Miamee, A. Periodically Correlated Processes and Their Stationary Dilations. SIAM J. Appl. Math. 1990, 50, 1194–1199. [Google Scholar] [CrossRef]
- Bochner, S. Vorlesungen über Fouriersche Integrale; Mathematik und ihre Anwendungen, Akademie-Verlag: Leipzig, Germany, 1932. [Google Scholar]
- Foias, C.; Frazho, A.E. A Geometric Approach to Positive Definite Sequences. In The Commutant Lifting Approach to Interpolation Problems; Birkhäuser: Basel, Switzerland, 1990; pp. 497–546. [Google Scholar]
- Frazho, A.E.; Arthur, E. On Stochastic Bilinear Systems. In Modelling and Application of Stochastic Processes; Springer: Boston, MA, USA, 1986; pp. 214–241. [Google Scholar]
- Timotin, D. Prediction theory and choice sequences: An alternate approach. In Advances in Invariant Subspaces and Other Results of Operator Theory; Springer: Berlin, Germany, 1986; pp. 341–352. [Google Scholar]
- Tseng, M.C. Contractions, Matrix Paramatrizations, and Quantum Information. arXiv, 2006; arXiv:quant-ph/0610259. [Google Scholar]
- Tseng, M.C.; Ramakrishna, V. Dilation Theoretic Parametrizations of Positive Matrices with Applications to Quantum Information. arXiv, 2006; arXiv:quant-ph/0610021. [Google Scholar]
- Damanik, D.; Pushnitski, A.; Simon, B. The Analytic Theory of Matrix Orthogonal Polynomials. Surv. Approx. Theory 2008, 4, 1–85. [Google Scholar]
- Bakonyi, M.; Constantinescu, T. Pitman Research Notes in Math. In Schur’s Algorithm and Several Applications; Longman Sc and Tech: Harlow, UK, 1992; Volume 261. [Google Scholar]
- Le Brigant, A. Computing distances and geodesics between manifold-valued curves in the SRV framework. arXiv, 2016; arXiv:1601.02358. [Google Scholar] [CrossRef]
- Le Brigant, A. A discrete framework to find the optimal matching between manifold-valued curves. arXiv, 2017; arXiv:1703.05107. [Google Scholar] [CrossRef]
- Celledoni, E.; Eslitzbichler, M.; Schmeding, A. Shape Analysis on Lie Groups with Applications in Computer Animation. arXiv, 2015; arXiv:1506.00783. [Google Scholar] [CrossRef]
- Zhang, Z.; Su, J.; Klassen, E.; Le, H.; Srivastava, A. Video-based action recognition using rate-invariant analysis of covariance trajectories. arXiv, 2015; arXiv:1503.06699. [Google Scholar]
- Le Brigant, A.; Arnaudon, M.; Barbaresco, F. A Probability on the Spaces of Curvesand the Associated Metric Spaces via Information Geometry; Radar Application. Ph.D. Thesis, Université de Bordeaux, Bordeaux, France, 4 July 2017. [Google Scholar]
- Kobayashi, S.; Nomizu, K. Foundations of Differential Geometry; Interscience Publishers: New York, NY, USA, 1963; Volume 1. [Google Scholar]
- Kriegl, A.; Michor, P.W. Aspects of the theory of infinite dimensional manifolds. Differ. Geom. Appl. 1991, 1, 159–176. [Google Scholar] [CrossRef]
- Michor, P.W.; Mumford, D. Shiva Mathematics Series. In Manifolds on Differential Mappings; Birkhauser: Basel, Switzerland, 1980; Volume 3. [Google Scholar]
- Michor, P.W.; Mumford, D. An overview of the Riemannian metrics on shape spaces of curves using the Hamiltonian approach. Appl. Comput. Harmon. Anal. 2007, 23, 74–113. [Google Scholar] [CrossRef]
- Michor, P.W. Topics in Differential Geometry; Graduate Studies in Mathematics American Mathematical Society: Providence, RI, USA, 2008; Volume 93. [Google Scholar]
- Srivastava, A.; Klassen, E.; Joshi, S.H.; Jermyn, I.H. Shape Analysis of Elastic Curves in Euclidean Spaces. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 1415–1428. [Google Scholar] [CrossRef] [PubMed]
- Bauer, M.; Bruveris, M.; Marsland, S.; Michor, P.W. Constructing reparameterization invariant metrics on spaces of plane curves. Differ. Geom. Appl. 2014, 34, 139–165. [Google Scholar] [CrossRef]
- Michor, P.W.; Mumford, D. Vanishing geodesic distance on spaces of submanifolds and diffeomorphisms. Doc. Math 2005, 10, 217–245. [Google Scholar]
- Bauer, M.; Bruveris, M.; Michor, P.W. Why Use Sobolev Metrics on the Space of Curves. In Riemannian Computing in Computer Vision; Springer: Cham, Switzerland, 2016; pp. 233–255. [Google Scholar]
- Gelman, A.; Carlin, J.B.; Stern, H.S.; Dunson, D.B.; Vehtari, A.; Rubin, D.B. Bayesian Data Analysis; CRC Press: Boca Raton, FL, USA, 2014; Volume 2. [Google Scholar]
- Yili, L.; Wong, K.M. Riemannian Distances for Signal Classification by Power Spectral Density. IEEE J. Sel. Top. Signal Process. 2013, 7, 655–669. [Google Scholar] [CrossRef]
- Hofer, M.; Pottmann, H. Energy-minimizing Splines in Manifolds. ACM Trans. Graph. 2004, 23, 284–293. [Google Scholar] [CrossRef]
- Shingel, T. Interpolation in special orthogonal groups. IMA J. Num. Anal. 2009, 29, 731–745. [Google Scholar] [CrossRef]
- Pilté, M.; Barbaresco, F. Tracking quality monitoring based on information geometry and geodesic shooting. In Proceedings of the 2016 17th International Radar Symposium (IRS), Krakow, Poland, 10–12 May 2016; pp. 1–6. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
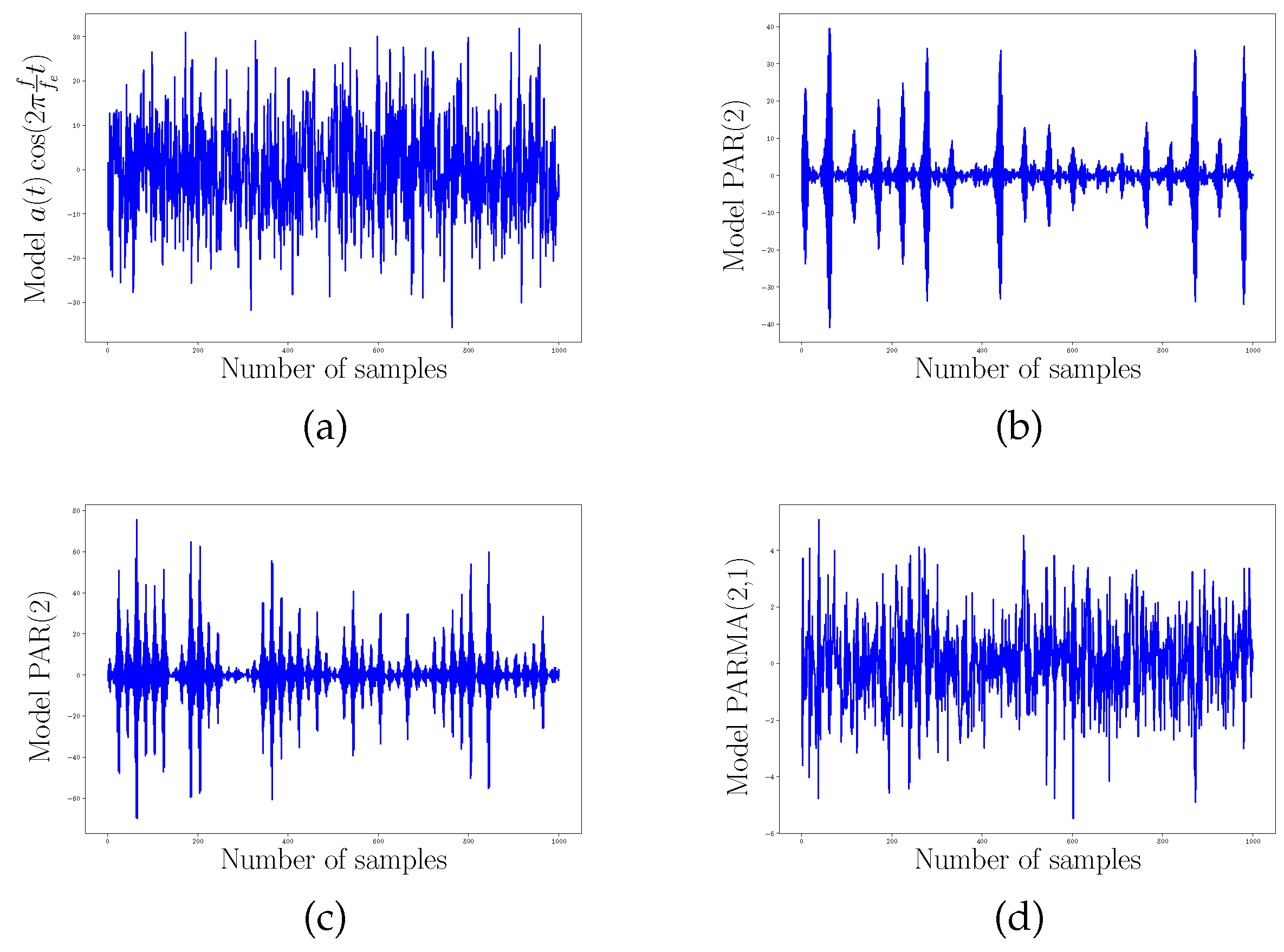
| Model of Signal Displayed in Figure 4 | Distance to the Signal of Figure 8 | |||||
|---|---|---|---|---|---|---|
| SO(3) | SO(4) | SO(5) | ||||
| 200 pts | 50 pts | 200 pts | 50 pts | 200 pts | 50 pts | |
| (a) | 5.72 | 4.47 | 97.19 | 26.86 | 526.36 | 95.47 |
| (b)—100 pts instead of 50 pts | 31.63 | 28.98 | 41.78 | 12.98 | 298.64 | 220.32 |
| (c) | 3.44 | 3.29 | 90.89 | 20.23 | 476.55 | 116.06 |
| (d) | 4.!9 | 4.50 | 187.42 | 50.36 | 621.51 | 171.73 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dugast, M.; Bouleux, G.; Marcon, E. Representation and Characterization of Nonstationary Processes by Dilation Operators and Induced Shape Space Manifolds. Entropy 2018, 20, 717. https://doi.org/10.3390/e20090717
Dugast M, Bouleux G, Marcon E. Representation and Characterization of Nonstationary Processes by Dilation Operators and Induced Shape Space Manifolds. Entropy. 2018; 20(9):717. https://doi.org/10.3390/e20090717
Chicago/Turabian StyleDugast, Maël, Guillaume Bouleux, and Eric Marcon. 2018. "Representation and Characterization of Nonstationary Processes by Dilation Operators and Induced Shape Space Manifolds" Entropy 20, no. 9: 717. https://doi.org/10.3390/e20090717
APA StyleDugast, M., Bouleux, G., & Marcon, E. (2018). Representation and Characterization of Nonstationary Processes by Dilation Operators and Induced Shape Space Manifolds. Entropy, 20(9), 717. https://doi.org/10.3390/e20090717