A New Chaotic System with Stable Equilibrium: Entropy Analysis, Parameter Estimation, and Circuit Design


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
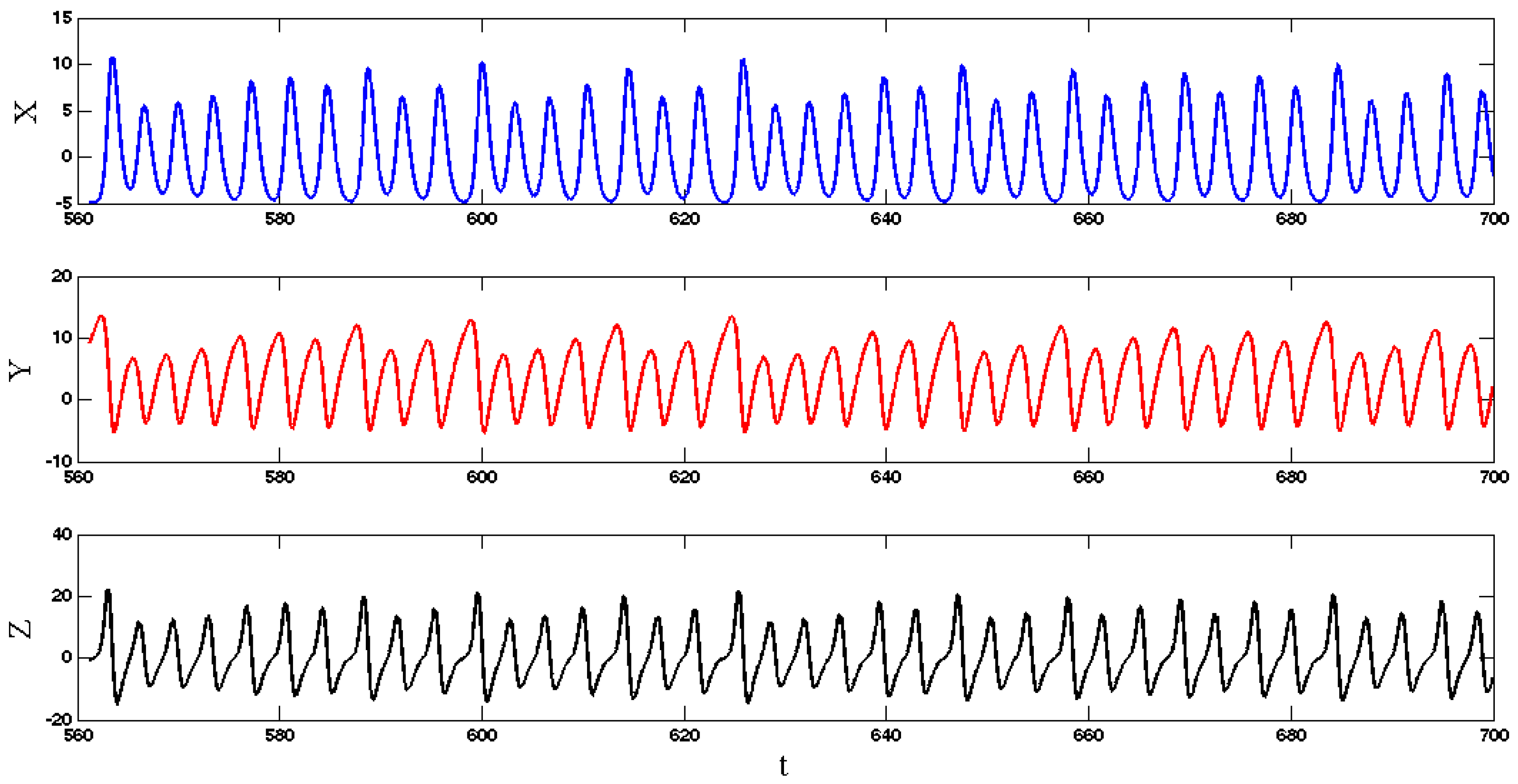
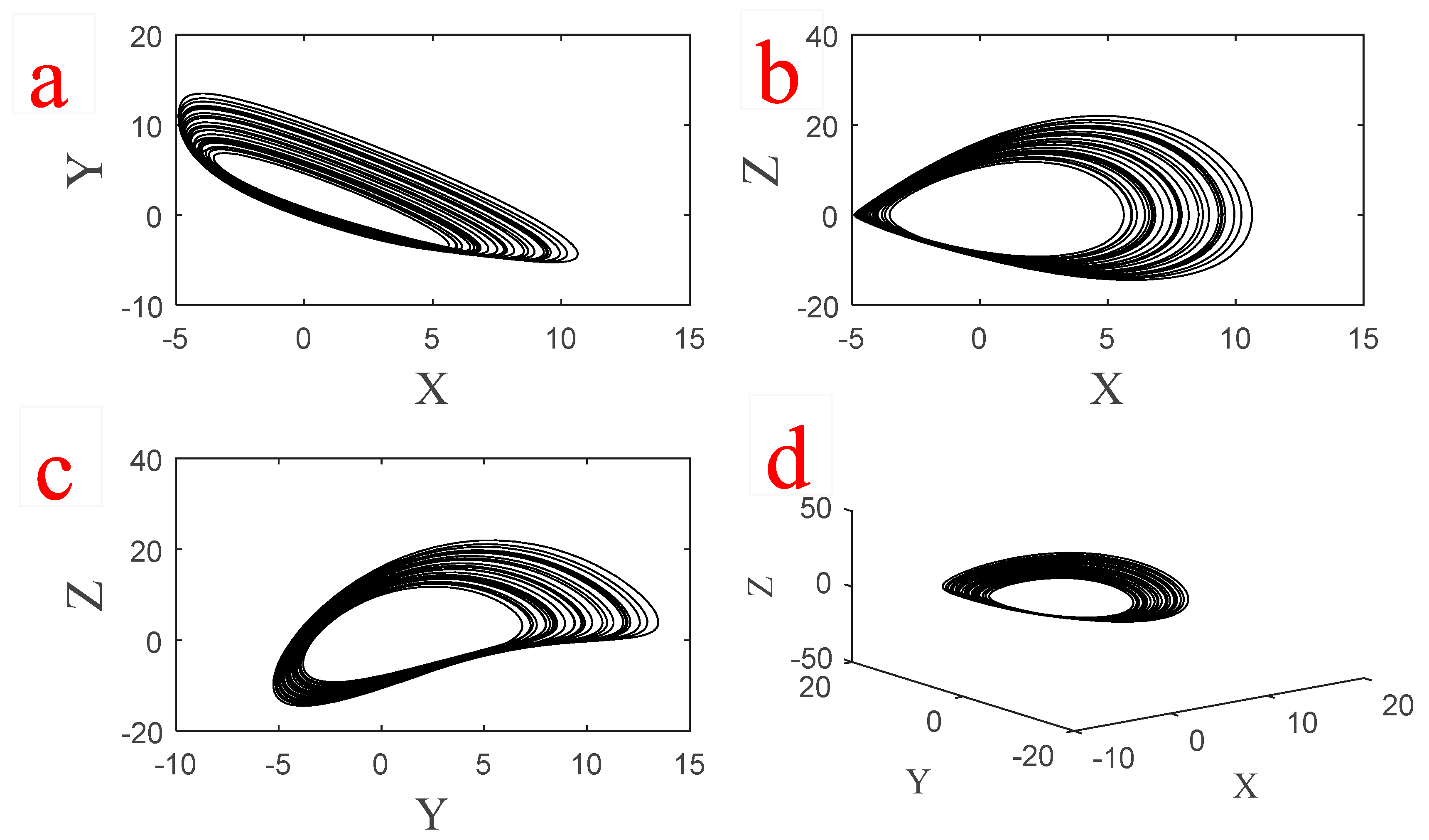
2. System Description
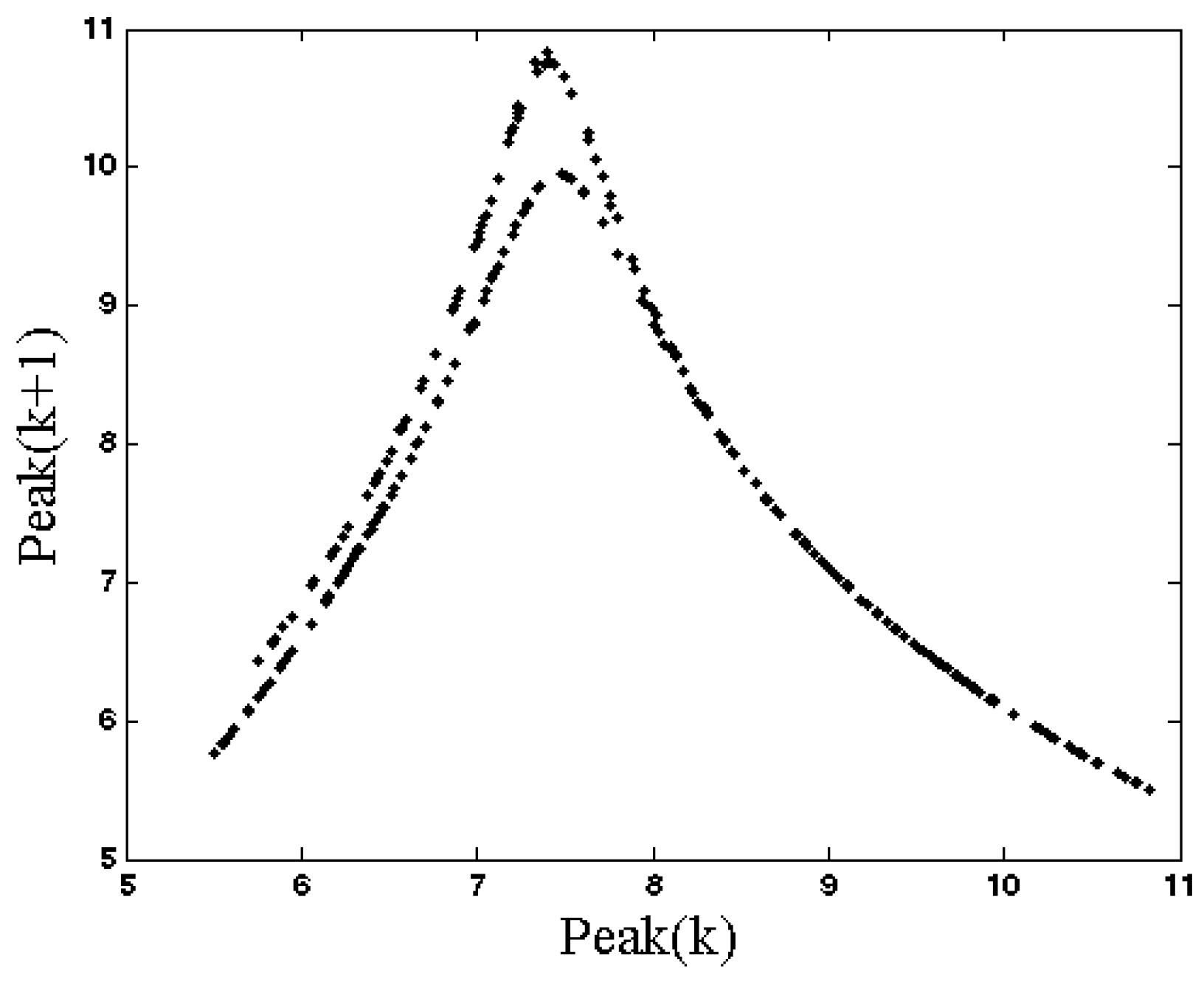
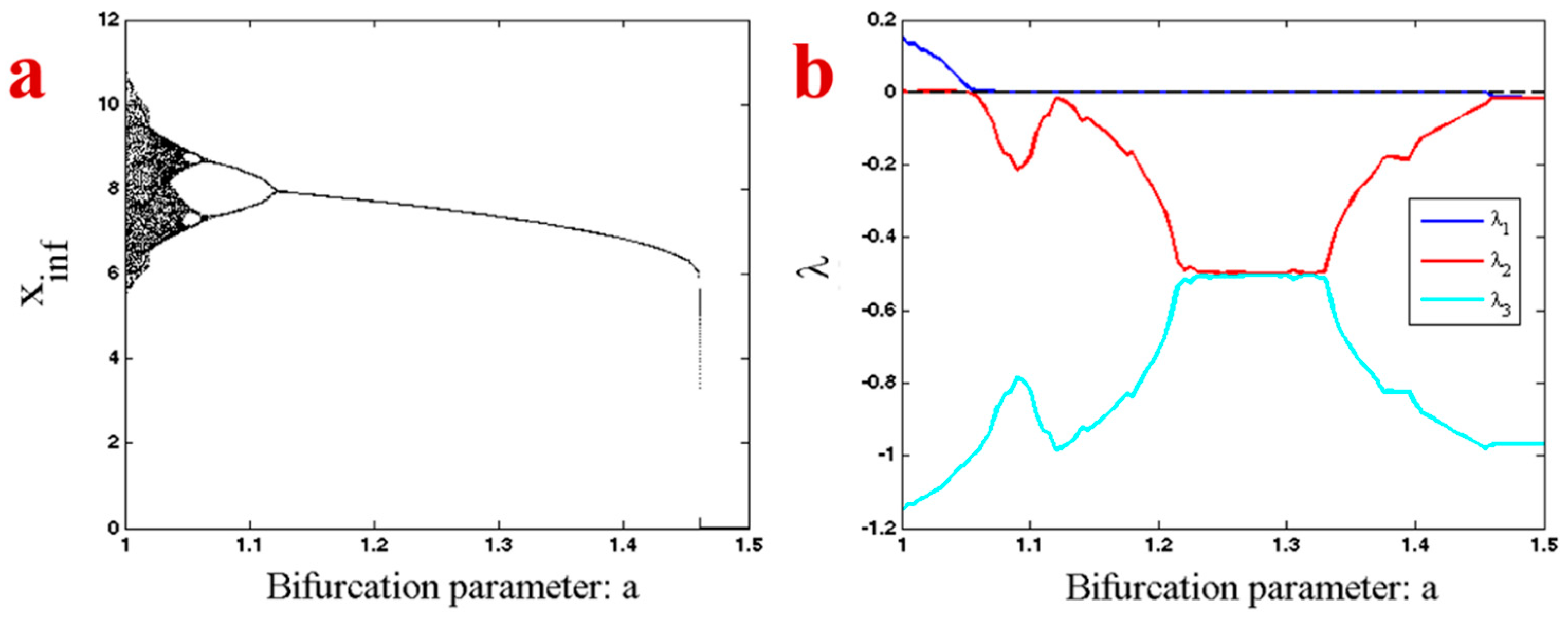
3. Bifurcation Analysis
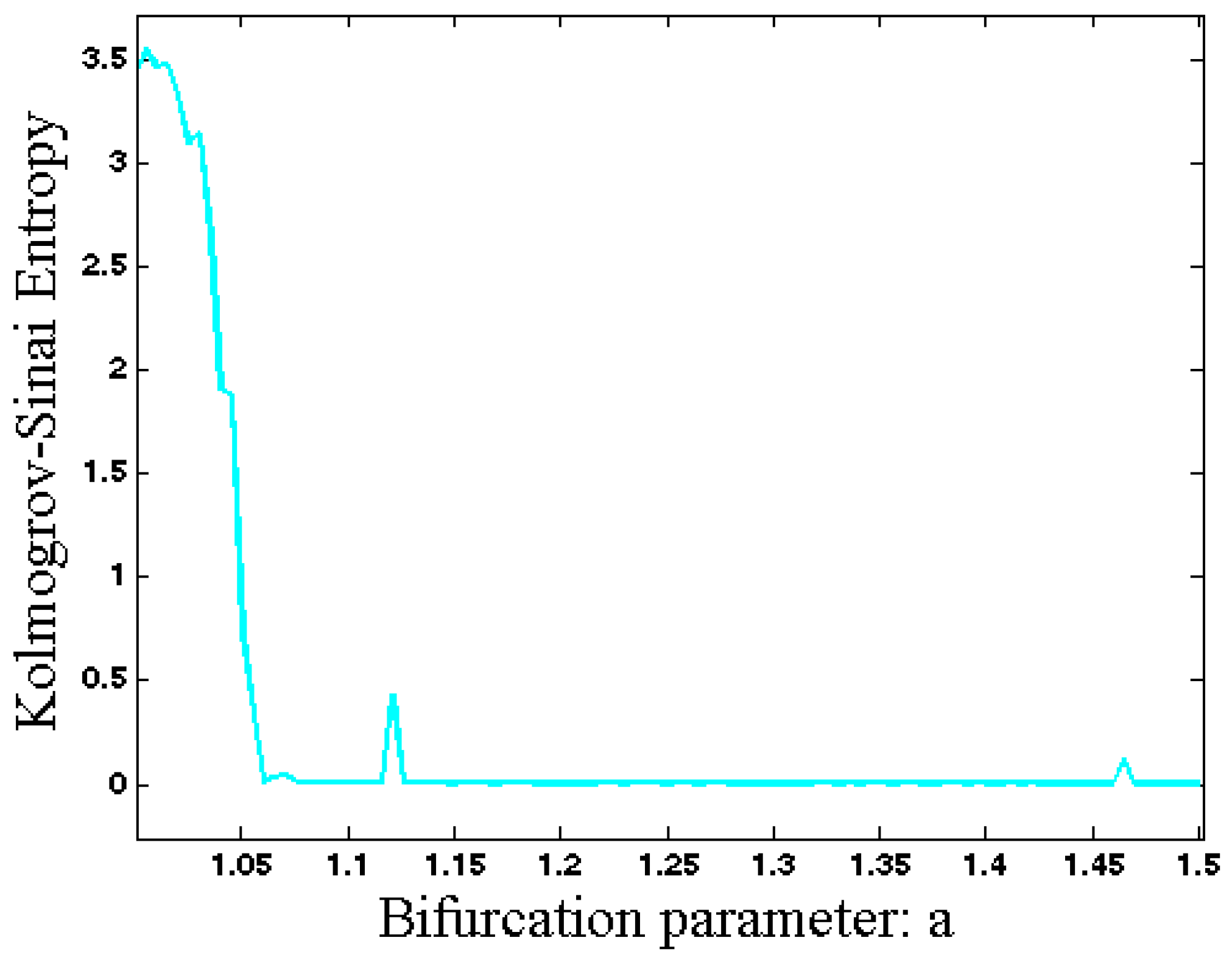
4. Entropy Analysis
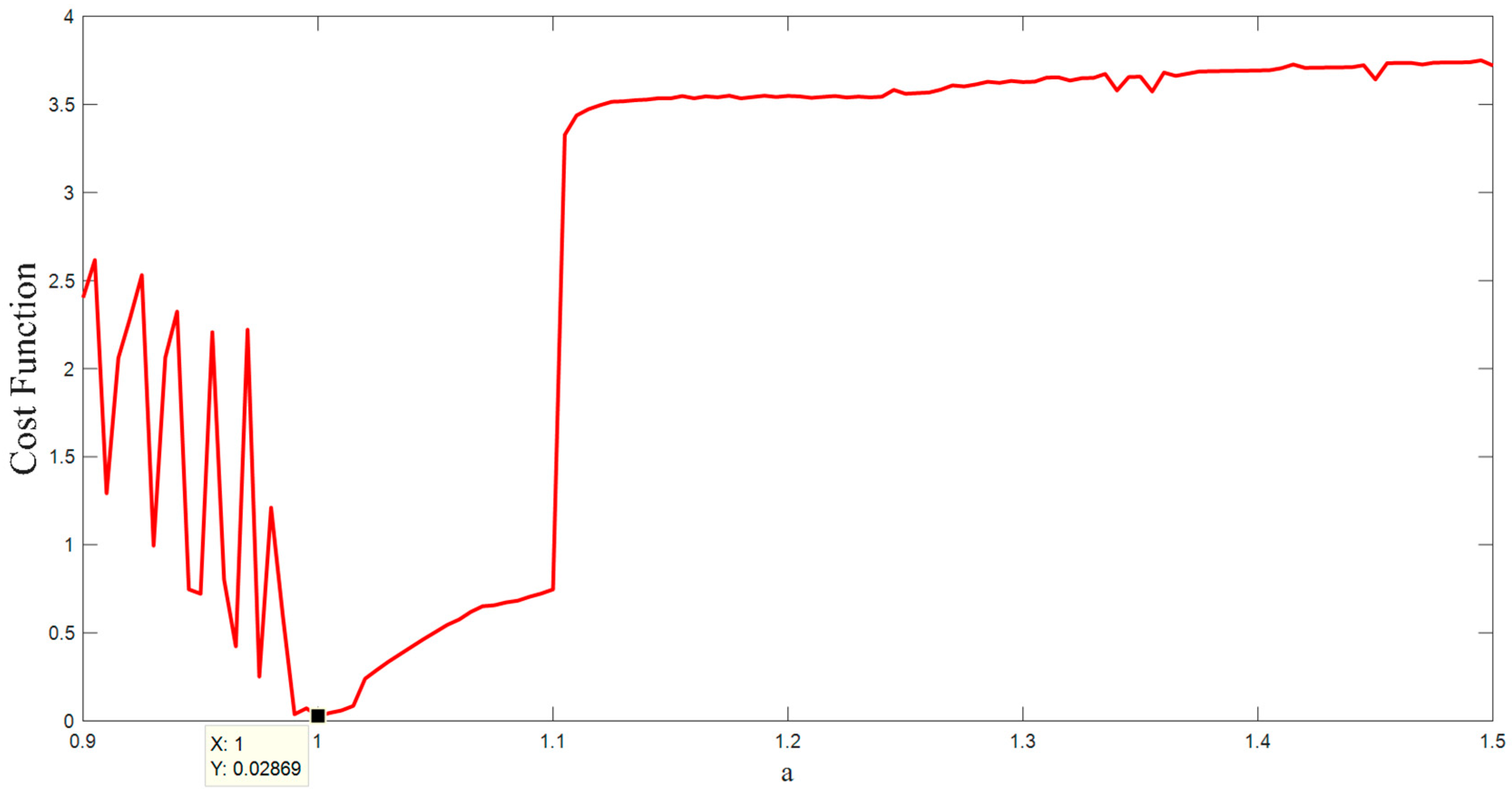
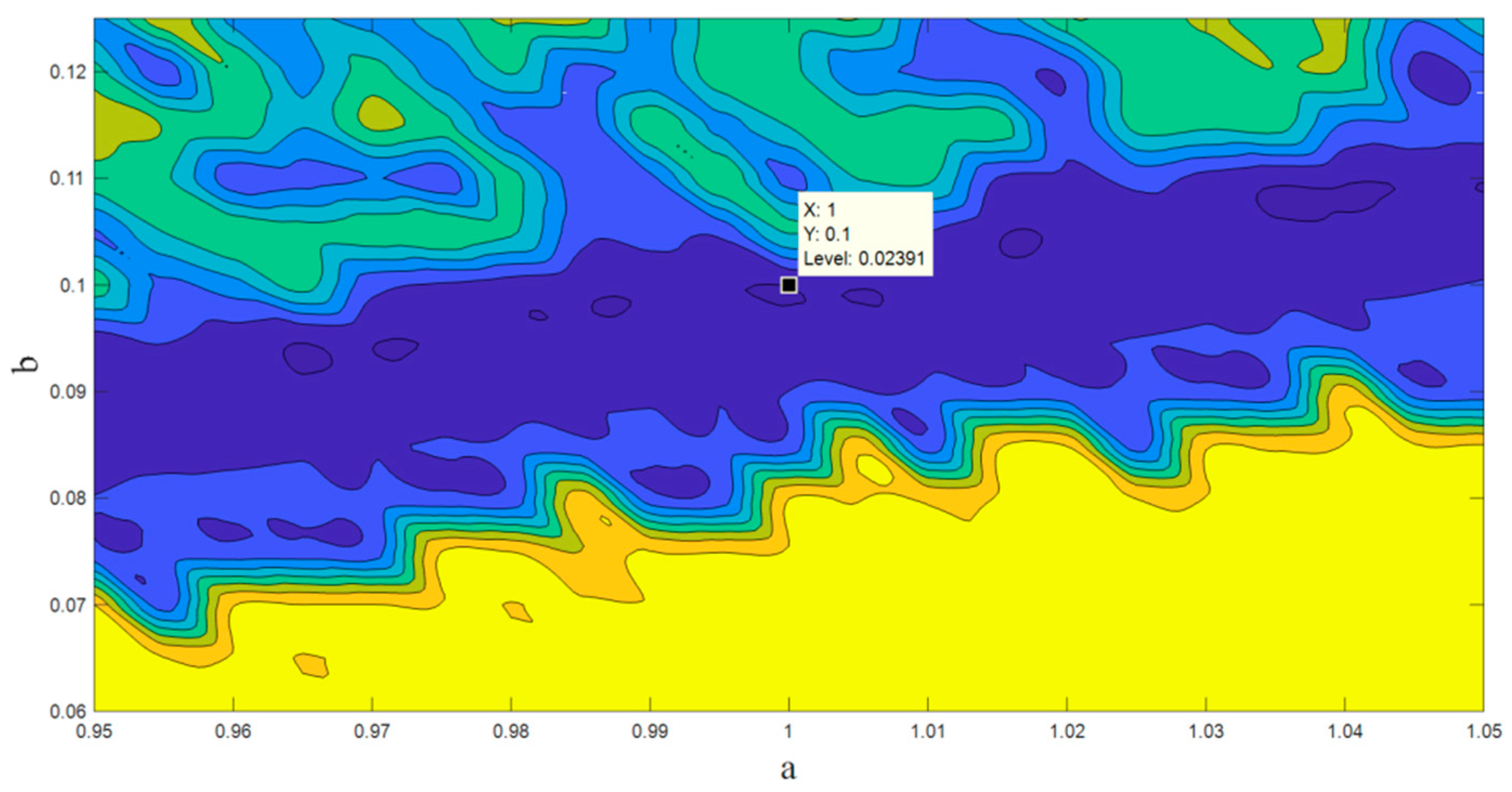
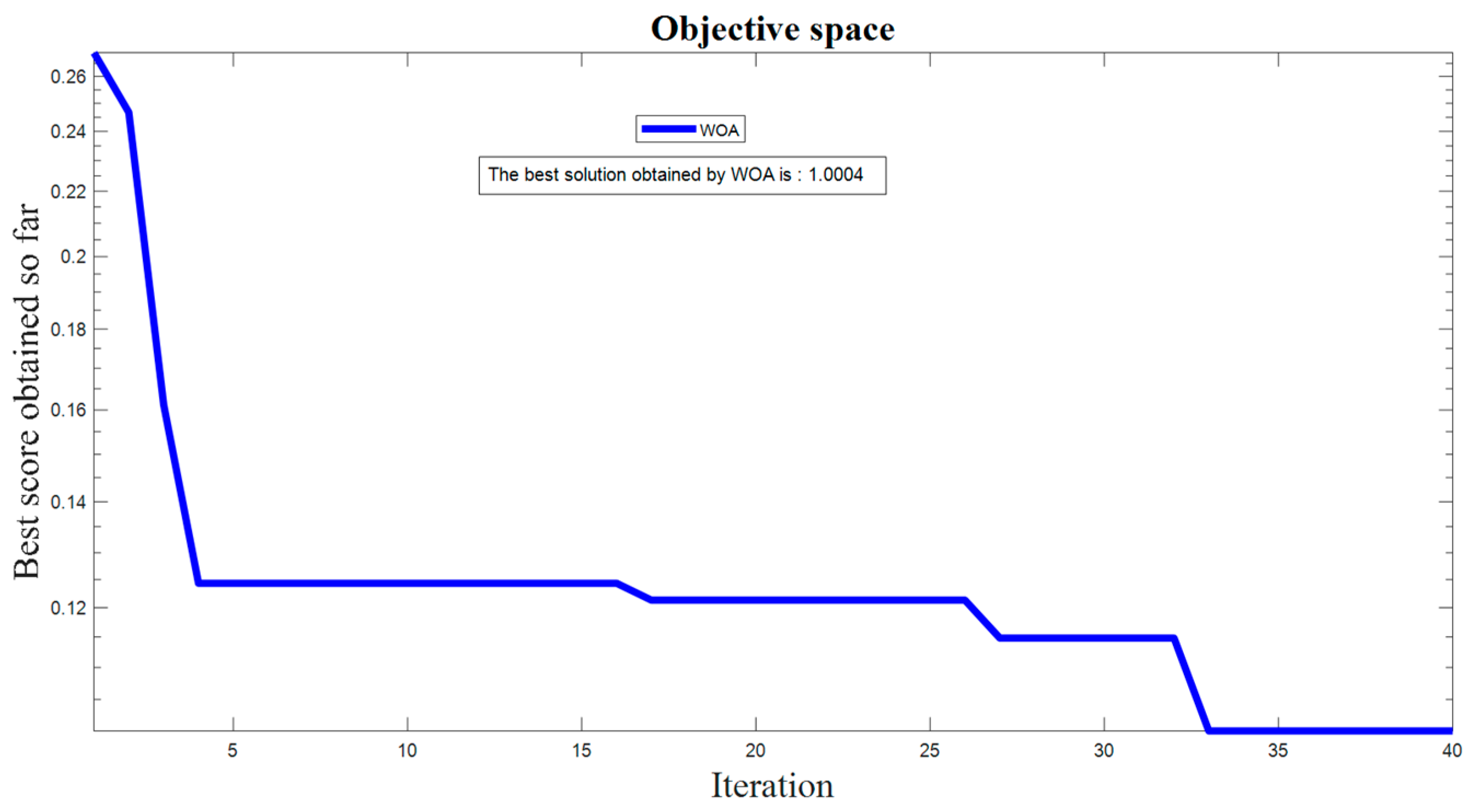
5. Parameter Estimation
6. Circuit Design
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lorenz, E.N. Deterministic nonperiodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef]
- Chen, G.; Ueta, T. Yet another chaotic attractor. Int. J. Bifurc. Chaos 1999, 9, 1465–1466. [Google Scholar] [CrossRef]
- Jafari, S.; Sprott, J.; Golpayegani, S.M.R.H. Elementary quadratic chaotic flows with no equilibria. Phys. Lett. A 2013, 377, 699–702. [Google Scholar] [CrossRef]
- Wei, Z. Dynamical behaviors of a chaotic system with no equilibria. Phys. Lett. A 2011, 376, 102–108. [Google Scholar] [CrossRef]
- Lao, S.-K.; Shekofteh, Y.; Jafari, S.; Sprott, J.C. Cost function based on Gaussian mixture model for parameter estimation of a chaotic circuit with a hidden attractor. Int. J. Bifurc. Chaos 2014, 24, 1450010. [Google Scholar] [CrossRef]
- Wang, X.; Chen, G. A chaotic system with only one stable equilibrium. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 1264–1272. [Google Scholar] [CrossRef]
- Jafari, S.; Sprott, J. Simple chaotic flows with a line equilibrium. Chaos Solitons Fractals 2013, 57, 79–84. [Google Scholar] [CrossRef]
- Rajagopal, K.; Karthikeyan, A.; Srinivasan, A. Bifurcation and chaos in time delayed fractional order chaotic memfractor oscillator and its sliding mode synchronization with uncertainties. Chaos Solitons Fractals 2017, 103, 347–356. [Google Scholar] [CrossRef]
- Pham, V.-T.; Jafari, S.; Volos, C.; Vaidyanathan, S.; Kapitaniak, T. A chaotic system with infinite equilibria located on a piecewise linear curve. Opt.-Int. J. Light Electron Opt. 2016, 127, 9111–9117. [Google Scholar] [CrossRef]
- Barati, K.; Jafari, S.; Sprott, J.C.; Pham, V.-T. Simple Chaotic Flows with a Curve of Equilibria. Int. J. Bifurc. Chaos 2016, 26, 1630034. [Google Scholar] [CrossRef]
- Tolba, M.F.; Said, L.A.; Madian, A.H.; Radwan, A.G. FPGA implementation of fractional-order integrator and differentiator based on Grünwald Letnikov’s definition. In Proceedings of the 2017 29th International Conference on Microelectronics (ICM), Beirut, Lebanon, 10–13 December 2017; pp. 1–4. [Google Scholar]
- Kingni, S.T.; Pham, V.-T.; Jafari, S.; Kol, G.R.; Woafo, P. Three-Dimensional Chaotic Autonomous System with a Circular Equilibrium: Analysis, Circuit Implementation and Its Fractional-Order Form. Circuits Syst. Signal Process. 2016, 35, 1933–1948. [Google Scholar] [CrossRef]
- Ismail, S.M.; Said, L.A.; Rezk, A.A.; Radwan, A.G.; Madian, A.H.; Abu-Elyazeed, M.F.; Soliman, A.M. Generalized fractional logistic map encryption system based on FPGA. AEU-Int. J. Electron. Commun. 2017, 80, 114–126. [Google Scholar] [CrossRef]
- Jafari, S.; Sprott, J.C.; Molaie, M. A simple chaotic flow with a plane of equilibria. Int. J. Bifurc. Chaos 2016, 26, 1650098. [Google Scholar] [CrossRef]
- Bao, B.; Jiang, T.; Wang, G.; Jin, P.; Bao, H.; Chen, M. Two-memristor-based Chua’s hyperchaotic circuit with plane equilibrium and its extreme multistability. Nonlinear Dyn. 2017, 89, 1157–1171. [Google Scholar] [CrossRef]
- Jafari, S.; Sprott, J.C.; Pham, V.-T.; Volos, C.; Li, C. Simple chaotic 3D flows with surfaces of equilibria. Nonlinear Dyn. 2016, 86, 1349–1358. [Google Scholar] [CrossRef]
- Sun, K.; Sprott, J. A simple jerk system with piecewise exponential nonlinearity. Int. J. Nonlinear Sci. Numer. Simul. 2009, 10, 1443–1450. [Google Scholar] [CrossRef]
- Leonov, G.; Kuznetsov, N.; Vagaitsev, V. Localization of hidden Chua’s attractors. Phys. Lett. A 2011, 375, 2230–2233. [Google Scholar] [CrossRef]
- Leonov, G.; Kuznetsov, N.; Vagaitsev, V. Hidden attractor in smooth Chua systems. Phys. D Nonlinear Phenom. 2012, 241, 1482–1486. [Google Scholar] [CrossRef]
- Leonov, N.V.; Kuznetsov, G.A. Hidden attractors in dynamical systems. From hidden oscillations in Hilbert–Kolmogorov, Aizerman, Kalman problems to hidden chaotic attractor in Chua circuits. Int. J. Bifurc. Chaos 2013, 23, 1330002. [Google Scholar] [CrossRef]
- Leonov, G.; Kuznetsov, N.; Kiseleva, M.; Solovyeva, E.; Zaretskiy, A. Hidden oscillations in mathematical model of drilling system actuated by induction motor with a wound rotor. Nonlinear Dyn. 2014, 77, 277–288. [Google Scholar] [CrossRef]
- Leonov, G.; Kuznetsov, N.; Mokaev, T. Hidden attractor and homoclinic orbit in Lorenz-like system describing convective fluid motion in rotating cavity. Commun. Nonlinear Sci. Numer. Simul. 2015, 28, 166–174. [Google Scholar] [CrossRef]
- Leonov, G.A.; Kuznetsov, N.V.; Mokaev, T.N. Homoclinic orbits, and self-excited and hidden attractors in a Lorenz-like system describing convective fluid motion. Eur. Phys. J. Spec. Top. 2015, 224, 1421–1458. [Google Scholar] [CrossRef]
- Danca, M.-F.; Kuznetsov, N. Hidden chaotic sets in a Hopfield neural system. Chaos Solitons Fractals 2017, 103, 144–150. [Google Scholar] [CrossRef]
- Danca, M.-F.; Kuznetsov, N.; Chen, G. Unusual dynamics and hidden attractors of the Rabinovich–Fabrikant system. Nonlinear Dyn. 2017, 88, 791–805. [Google Scholar] [CrossRef]
- Kuznetsov, N.; Leonov, G.; Yuldashev, M.; Yuldashev, R. Hidden attractors in dynamical models of phase-locked loop circuits: Limitations of simulation in MATLAB and SPICE. Commun. Nonlinear Sci. Numer. Simul. 2017, 51, 39–49. [Google Scholar]
- Dudkowski, D.; Jafari, S.; Kapitaniak, T.; Kuznetsov, N.V.; Leonov, G.A.; Prasad, A. Hidden attractors in dynamical systems. Phys. Rep. 2016, 637, 1–50. [Google Scholar] [CrossRef]
- Hassard, B.D.; Kazarinoff, N.D.; Wan, Y.-H. Theory and Applications of Hopf Bifurcation; CUP Archive: Cambridge, UK, 1981; Volume 41. [Google Scholar]
- Stankevich, N.V.; Dvorak, A.; Astakhov, V.; Jaros, P.; Kapitaniak, M.; Perlikowski, P.; Kapitaniak, T. Chaos and Hyperchaos in Coupled Antiphase Driven Toda Oscillators. Regul. Chaotic Dyn. 2018, 23, 120–126. [Google Scholar] [CrossRef]
- Jaros, P.; Brezetsky, S.; Levchenko, R.; Dudkowski, D.; Kapitaniak, T.; Maistrenko, Y. Solitary states for coupled oscillators with inertia. Chaos Interdiscip. J. Nonlinear Sci. 2018, 28, 011103. [Google Scholar] [CrossRef] [PubMed]
- Kapitaniak, T.; Leonov, G.A. Multistability: Uncovering hidden attractors. Eur. Phys. J. Spec. Top. 2015, 224, 1405–1408. [Google Scholar] [CrossRef]
- Lai, Q.; Chen, S. Generating multiple chaotic attractors from Sprott B system. Int. J. Bifurc. Chaos 2016, 26, 1650177. [Google Scholar] [CrossRef]
- Lai, Q.; Wang, L. Chaos, bifurcation, coexisting attractors and circuit design of a three-dimensional continuous autonomous system. Opt.-Int. J. Light Electron Opt. 2016, 127, 5400–5406. [Google Scholar] [CrossRef]
- Kengne, J.; Njitacke, Z.; Fotsin, H. Dynamical analysis of a simple autonomous jerk system with multiple attractors. Nonlinear Dyn. 2016, 83, 751–765. [Google Scholar] [CrossRef]
- Ma, J.; Wu, F.; Ren, G.; Tang, J. A class of initials-dependent dynamical systems. Appl. Math. Comput. 2017, 298, 65–76. [Google Scholar] [CrossRef]
- Wei, Z.; Moroz, I.; Liu, A. Degenerate Hopf bifurcations, hidden attractors, and control in the extended Sprott E system with only one stable equilibrium. Turk. J. Math. 2014, 38, 672–687. [Google Scholar] [CrossRef]
- Wei, Z.; Zhang, W. Hidden hyperchaotic attractors in a modified Lorenz–Stenflo system with only one stable equilibrium. Int. J. Bifurc. Chaos 2014, 24, 1450127. [Google Scholar] [CrossRef]
- Hilborn, R.C. Chaos and Nonlinear Dynamics: An Introduction for Scientists and Engineers; Oxford University Press: Oxford, UK, 2000. [Google Scholar]
- Vaidyanathan, S.; Volos, C.; Pham, V.-T.; Madhavan, K.; Idowu, B.A. Adaptive backstepping control, synchronization and circuit simulation of a 3-D novel jerk chaotic system with two hyperbolic sinusoidal nonlinearities. Arch. Control Sci. 2014, 24, 375–403. [Google Scholar] [CrossRef]
- Tam, W.M.; Lau, F.C.; Chi, K.T. Digital Communications with Chaos: Multiple Access Techniques and Performance; Elsevier: New York, NY, USA, 2010. [Google Scholar]
- Molaie, M.; Jafari, S.; Sprott, J.C.; Golpayegani, S.M.R.H. Simple chaotic flows with one stable equilibrium. Int. J. Bifurc. Chaos 2013, 23, 1350188. [Google Scholar] [CrossRef]
- Kant, N.A.; Dar, M.R.; Khanday, F.A.; Psychalinos, C. Ultra-low-Voltage Integrable Electronic Realization of Integer-and Fractional-Order Liao’s Chaotic Delayed Neuron Model. Circuits Syst. Signal Process. 2017, 36, 4844–4868. [Google Scholar] [CrossRef]
- Tsirimokou, G.; Psychalinos, C.; Elwakil, A.S.; Salama, K.N. Electronically tunable fully integrated fractional-order resonator. IEEE Trans. Circuits Syst. II Express Br. 2018, 65, 166–170. [Google Scholar] [CrossRef]
- Bertsias, P.; Psychalinos, C.; Radwan, A.G.; Elwakil, A.S. High-Frequency Capacitorless Fractional-Order CPE and FI Emulator. Circuits Syst. Signal Process. 2017, 37, 2694–2713. [Google Scholar] [CrossRef]
- Tang, Y.X.; Khalaf, A.J.M.; Rajagopal, K.; Pham, V.T.; Jafari, S.; Tian, Y. A new nonlinear oscillator with infinite number of coexisting hidden and self-excited attractors. Chin. Phys. B 2018, 27, 040502. [Google Scholar] [CrossRef]
- Alghassab, M.; Mahmoud, A.; Zohdy, M.A. Nonlinear Control of Chaotic Forced Duffing and Van der Pol Oscillators. Int. J. Mod. Nonlinear Theory Appl. 2017, 6, 26. [Google Scholar] [CrossRef]
- Njah, A. Synchronization via active control of parametrically and externally excited Φ6 Van der Pol and Duffing oscillators and application to secure communications. J. Vib. Control 2011, 17, 493–504. [Google Scholar] [CrossRef]
- He, Q.; Wang, L.; Liu, B. Parameter estimation for chaotic systems by particle swarm optimization. Chaos Solitons Fractals 2007, 34, 654–661. [Google Scholar] [CrossRef]
- Tang, Y.; Guan, X. Parameter estimation for time-delay chaotic system by particle swarm optimization. Chaos Solitons Fractals 2009, 40, 1391–1398. [Google Scholar] [CrossRef]
- Wang, L.; Xu, Y. An effective hybrid biogeography-based optimization algorithm for parameter estimation of chaotic systems. Expert Syst. Appl. 2011, 38, 15103–15109. [Google Scholar] [CrossRef]
- Jafari, S.; Hashemi Golpayegani, S.M.R.; Jafari, A.H.; Gharibzadeh, S. Some remarks on chaotic systems. Int. J. Gen. Syst. 2012, 41, 329–330. [Google Scholar] [CrossRef]
- Jafari, S.; Hashemi Golpayegani, S.M.R.; Daliri, A. Parameters identification of chaotic systems by quantum-behaved particle swarm optimization. Int. J. Comput. Math. 2009, 86, 2225–2235, Comment on Int. J. Comput. Math. 2013, 90, 903–905. [Google Scholar]
- Jafari, S.; Hashemi Golpayegani, S.M.R.; Rasoulzadeh Darabad, M. Parameter identification and synchronization of fractional-order chaotic systems. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 305–316, Comment on Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 811–814. [Google Scholar]
- Shekofteh, Y.; Jafari, S.; Sprott, J.C.; Hashemi Golpayegani, S.M.R.; Almasganj, F. A gaussian mixture model based cost function for parameter estimation of chaotic biological systems. Commun. Nonlinear Sci. Numer. Simul. 2015, 20, 469–481. [Google Scholar] [CrossRef]
- Jafari, S.; Sprott, J.C.; Pham, V.-T.; Hashemi Golpayegani, S.M.R.; Jafari, A.H. A New Cost Function for Parameter Estimation of Chaotic Systems Using Return Maps as Fingerprints. Int. J. Bifurc. Chaos 2014, 24, 1450134. [Google Scholar] [CrossRef]
- Kingni, S.T.; Jafari, S.; Simo, H.; Woafo, P. Three-dimensional chaotic autonomous system with only one stable equilibrium: Analysis, circuit design, parameter estimation, control, synchronization and its fractional-order form. Eur. Phys. J. Plus 2014, 129, 76. [Google Scholar] [CrossRef]
- Wang, Z.; Abdolmohammadi, H.R.; Alsaadi, F.E.; Hayat, T.; Pham, V.-T. A new oscillator with infinite coexisting asymmetric attractors. Chaos Solitons Fractals 2018, 110, 252–258. [Google Scholar] [CrossRef]
- Hu, X.; Liu, C.; Liu, L.; Ni, J.; Yao, Y. Chaotic dynamics in a neural network under electromagnetic radiation. Nonlinear Dyn. 2018, 91, 1541–1554. [Google Scholar] [CrossRef]
- Hu, X.; Liu, C.; Liu, L.; Ni, J.; Li, S. An electronic implementation for Morris–Lecar neuron model. Nonlinear Dyn. 2016, 84, 2317–2332. [Google Scholar] [CrossRef]
- Lee, K.S.; Geem, Z.W. A new meta-heuristic algorithm for continuous engineering optimization: Harmony search theorypractice. Comput. Methods Appl. Mech. Eng. 2005, 194, 3902–3933. [Google Scholar] [CrossRef]
- Hu, X.; Liu, C.; Liu, L.; Yao, Y.; Zheng, G. Multi-scroll hidden attractors and multi-wing hidden attractors in a 5-dimensional memristive system. Chin. Phys. B 2017, 26, 110502. [Google Scholar] [CrossRef]
- Hu, X.; Liu, C.; Liu, L.; Ni, J.; Li, S. Multi-scroll hidden attractors in improved Sprott A system. Nonlinear Dyn. 2016, 86, 1725–1734. [Google Scholar] [CrossRef]
- Majhi, S.; Perc, M.; Ghosh, D. Chimera states in a multilayer network of coupled and uncoupled neurons. Chaos Interdiscip. J. Nonlinear Sci. 2017, 27, 073109. [Google Scholar] [CrossRef] [PubMed]
- Namazi, H.; Daneshi, A.; Azarnoush, H.; Jafari, S.; Towhidkhah, F. Fractal based analysis of the influence of auditory stimuli on eye movements. Fractals 2018, 26, 1850040. [Google Scholar] [CrossRef]
- Gosak, M.; Stožer, A.; Markovič, R.; Dolenšek, J.; Marhl, M.; Slak Rupnik, M.; Perc, M. The relationship between node degree and dissipation rate in networks of diffusively coupled oscillators and its significance for pancreatic beta cells. Chaos Interdiscip. J. Nonlinear Sci. 2015, 25, 073115. [Google Scholar] [CrossRef] [PubMed]
- Smirnova, R.; Zakrzhevsky, M.; Schukin, I. Global analysis of the nonlinear Duffing-van der Pol type equation by a bifurcation theory and complete bifurcation groups method. Vibroeng. Procedia 2014, 3, 139–143. [Google Scholar]










© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kapitaniak, T.; Mohammadi, S.A.; Mekhilef, S.; Alsaadi, F.E.; Hayat, T.; Pham, V.-T. A New Chaotic System with Stable Equilibrium: Entropy Analysis, Parameter Estimation, and Circuit Design. Entropy 2018, 20, 670. https://doi.org/10.3390/e20090670
Kapitaniak T, Mohammadi SA, Mekhilef S, Alsaadi FE, Hayat T, Pham V-T. A New Chaotic System with Stable Equilibrium: Entropy Analysis, Parameter Estimation, and Circuit Design. Entropy. 2018; 20(9):670. https://doi.org/10.3390/e20090670
Chicago/Turabian StyleKapitaniak, Tomasz, S. Alireza Mohammadi, Saad Mekhilef, Fawaz E. Alsaadi, Tasawar Hayat, and Viet-Thanh Pham. 2018. "A New Chaotic System with Stable Equilibrium: Entropy Analysis, Parameter Estimation, and Circuit Design" Entropy 20, no. 9: 670. https://doi.org/10.3390/e20090670
APA StyleKapitaniak, T., Mohammadi, S. A., Mekhilef, S., Alsaadi, F. E., Hayat, T., & Pham, V.-T. (2018). A New Chaotic System with Stable Equilibrium: Entropy Analysis, Parameter Estimation, and Circuit Design. Entropy, 20(9), 670. https://doi.org/10.3390/e20090670