Principle of Least Psychomotor Action: Modelling Situated Entropy in Optimization of Psychomotor Work Involving Human, Cyborg and Robot Workers


Abstract
1. Introduction
2. Principle of Least Psychomotor Action
2.1. Problem Statement
2.2. PLPA
3. Workers: PLPA and Human, Cyborg, Robot Psychomotor Skills
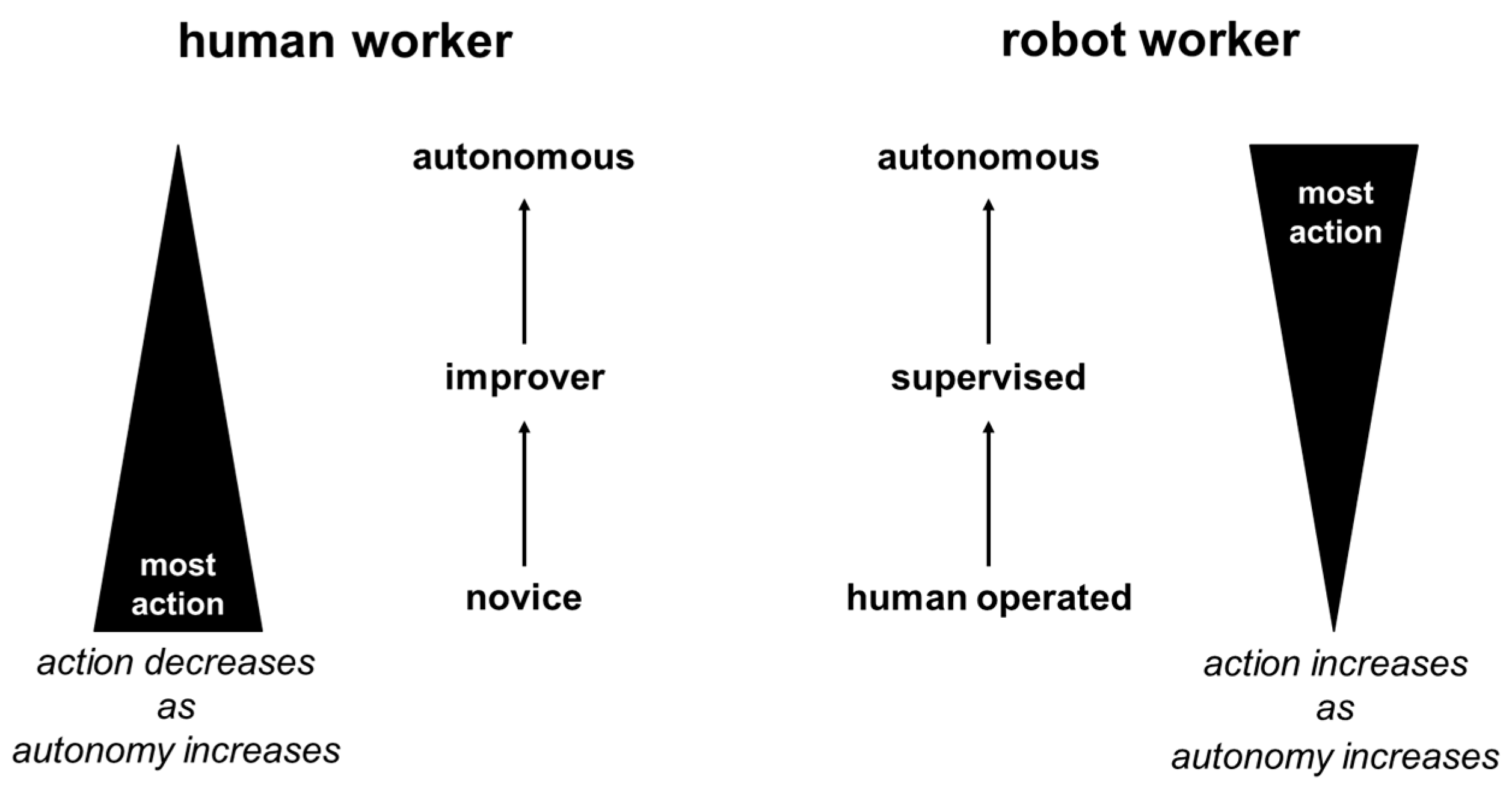
3.1. Human Workers and PLPA
3.2. Cyborg Workers and PLPA
3.3. Robot Workers and PLPA
3.4. Comparison of the PLPA Potential of Human, Cyborg and Robot Workers
4. Work: Engineering Work Setting, Composition and Uncertainty towards PLPA
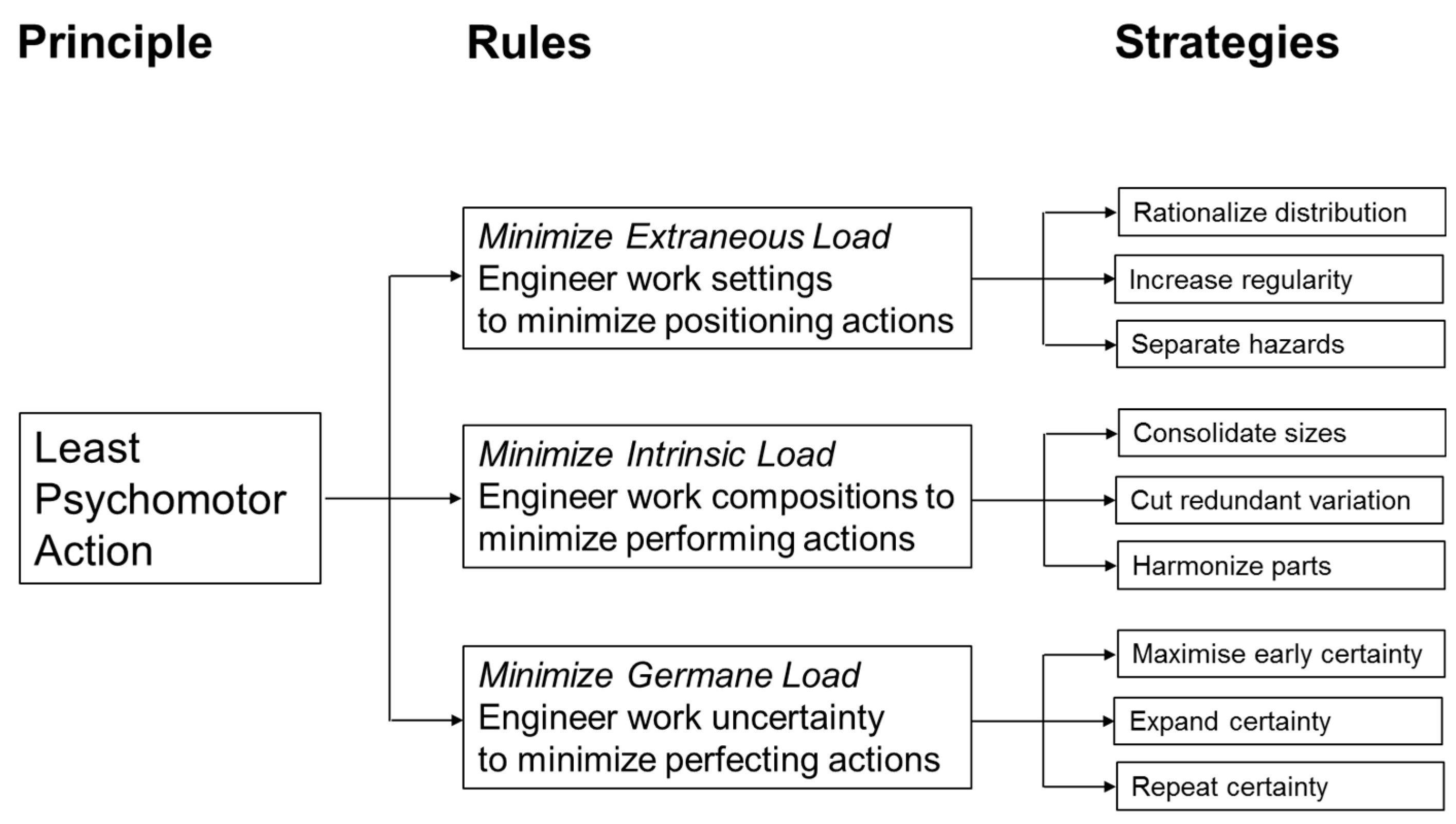
4.1. Engineering Design Rules and Strategies for PLPA
4.2. Positioning Action—Work Setting (Extraneous Load)
4.3. Performing Action—Work Composition (Intrinsic Load)
4.4. Perfecting Action—Work Uncertainty (Germane Load)
5. PLPA Modelling Examples
5.1. PLPA Modelling
5.2. Positioning Action Example: Extraneous Load from Agricultural Work Settings
5.3. Performing Action Example: Intrinsic Load from Soft Products Work Composition
5.4. Perfecting Action Example: Germane Load from Construction Work Uncertainty
5.5. Summary
6. Discussion
6.1. Background
6.2. Implications for Theory Building
6.3. Implications for Applied Research
6.4. Implications for Practice
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Beer, J.M.; Fisk, A.D.; Rogers, W.A. Toward a framework for levels of robot autonomy in human-robot interaction. J. Hum. Robot Interact. 2014, 3, 74–99. [Google Scholar] [CrossRef] [PubMed]
- Ström, D.P.; Bogoslavskyi, I.; Stachniss, C. Robust exploration and homing for autonomous robots. Robot. Auton. Syst. 2017, 90, 125–135. [Google Scholar] [CrossRef]
- Fitts, P.M.; Posner, M.I. Human Performance; Brooks: Belmont, CA, USA, 1967. [Google Scholar]
- Romiszowski, A. Volume II: The development of physical skills: Instruction in the psychomotor domain. In Instructional-Design Theories and Models: A New Paradigm of Instructional Theory; Reigeluth, C.M., Ed.; Lawrence Erlbaum Associates: Mahwah, NJ, USA, 1999; pp. 457–481. [Google Scholar]
- Jeong-kyoo, K. What you can learn from Chun’s elegant golf swing. The Korean Times, 21 September 2016. [Google Scholar]
- Nishiguchi, S.; Ogawa, K.; Yoshikawa, Y.; Chikaraishi, T.; Hirata, O.; Ishiguro, H. Theatrical approach: Designing human-like behaviour in humanoid robots. Robot. Auton. Syst. 2017, 89, 158–166. [Google Scholar] [CrossRef]
- Lin, X.; Schwartz, D.L.; Bransford, J. Intercultural adaptive expertise: Explicit and implicit lessons from Dr Hatano. Hum. Dev. 2007, 50, 65–72. [Google Scholar] [CrossRef]
- Perencevich, K.C.; Seidel, R.J.; Kett, A.L. From Principles of Learning to Strategies for Instruction: Empirically Based Ingredients to Guide Instructional Development; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Schwartz, D.L.; Bransford, J.; Sears, D. Efficiency and innovation in transfe. In Transfer of Learning from a Modern Multidisciplinary Perspective; Mestre, J., Ed.; Information Age Publishing: Greenwich, CT, USA, 2005. [Google Scholar]
- Ullén, F.; Hambrick, D.Z.; Mosing, M.A. Rethinking expertise: A multifactorial gene–environment interaction model of expert performance. Psychol. Bull. 2016, 142, 427. [Google Scholar] [CrossRef] [PubMed]
- Pfeifer, R.; Bongard, J. How the Body Shapes the Way We Think: A New View of Intelligence; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Wilson, M. Six Views of Embodied Cognition. Psychon. Bull. Rev. 2002, 9, 625–636. [Google Scholar] [CrossRef] [PubMed]
- Wilson, R.A.; Foglia, L. Embodied Cognition. In The Stanford Encyclopedia of Philosophy, Spring 2017 ed.; Zalta, E.N., Ed.; 2017; Available online: https://plato.stanford.edu/archives/spr2017/entries/embodied-cognition (accessed on 27 February 2018).
- Gilchrist, J.R.; Gruber, J.J. Psychomotor domains. Mot. Skills Theory Pract. 1984, 7, 57–70. [Google Scholar]
- Du, F.; Zhu, X.H.; Zhang, Y.; Friedman, M.; Zhang, N.; Uğurbil, K.; Chen, W. Tightly coupled brain activity and cerebral ATP metabolic rate. Proc. Natl. Acad. Sci. USA 2008, 105, 6409–6414. [Google Scholar] [CrossRef] [PubMed]
- Brossog, M.; Bornschlegl, M.; Franke, J. Reducing the energy consumption of industrial robots in manufacturing systems. Int. J. Adv. Manuf. Technol. 2015, 78, 1315–1328. [Google Scholar]
- Brynjolfsson, E.; McAfee, A. The Second Machine Age: Work, Progress, and Prosperity in a Time of Brilliant Technologies; W.W. Norton & Company: New York, NY, USA, 2014. [Google Scholar]
- Corbyn, Z. Robots are leaving the factory floor and heading for your desk—And your job. The Guardian, 9 February 2015. [Google Scholar]
- Ford, M. The rise of the ROBOTS: Technology and the Threat of Mass Unemployment; One World Publications: London, UK, 2015. [Google Scholar]
- Hollinger, J. Meet the cobots: Humans and robots together on the factory floor. Financial Times, 5 May 2016. [Google Scholar]
- Wang, X.V.; Kemény, Z.; Váncza, J.; Wang, L. Human–robot collaborative assembly in cyber-physical production: Classification framework and implementation. CIRP Ann. Manuf. Technol. 2017, 66, 5–8. [Google Scholar] [CrossRef]
- Boschma, R.; Frenken, K. The emerging empirics of evolutionary economic geography. J. Econ. Geogr. 2011, 11, 295–307. [Google Scholar] [CrossRef]
- Somwanshi, R.; Shindepatil, U.; Tule, D.; Mankar, A.; Ingle, N.; Rajamanya, G.B.D.V.; Deshmukh, A. Study and development of village as a smart village. Int. J. Sci. Eng. Res. 2016, 7, 395–408. [Google Scholar]
- Fox, S. Cyborgs, robots and society: Implications for the future of society from human enhancement with in-the-body technologies. Technologies 2018, 6, 50. [Google Scholar] [CrossRef]
- Fox, S. Beyond AI: Multi-Intelligence (MI) Combining natural and artificial intelligences in hybrid beings and systems. Technologies 2017, 5, 38. [Google Scholar] [CrossRef]
- Feynman, R.P. The Principle of Least Action in Quantum Mechanics. Ph.D. Thesis, Princeton University, Princeton, NJ, USA, 1942. [Google Scholar]
- Zhao, T.; Hua, Y.C.; Guo, Z.Y. The Principle of Least Action for Reversible Thermodynamic Processes and Cycles. Entropy 2018, 20, 542. [Google Scholar] [CrossRef]
- Gibbs, S. Elon Musk drafts in humans after robots slow down Tesla Model 3 production. The Guardian, 16 April 2018. [Google Scholar]
- Taylor, E.F. A call to action. Am. J. Phys. 2003, 71, 423–425. [Google Scholar] [CrossRef]
- Kline, M. Mathematical Thought from Ancient to Modern Times; Oxford University Press: New York, USA, 1972; pp. 167–168. [Google Scholar]
- Terekhovich, V. Metaphysics of the principle of least action. Stud. Hist. Philos. Sci. Part B Stud. Hist. Philos. Mod. Phys. 2018, 62, 189–201. [Google Scholar] [CrossRef]
- Crandall, B.; Klein, G.; Klein, G.A.; Hoffman, R.R. Working Minds: A Practitioner’s Guide to Cognitive Task Analysis; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Beilock, S.L. Beyond the playing field: Sport psychology meets embodied cognition. Int. Rev. Sport Exerc. Psychol. 2008, 1, 19–30. [Google Scholar] [CrossRef]
- Krakauer, J.W.; Shadmehr, R. Consolidation of motor memory. Trends Neurosci. 2006, 29, 58–64. [Google Scholar] [CrossRef] [PubMed]
- Cappuccio, M. Flow, choke, skill. The role of the non-conscious in sport performance. In Before Consciousness: In Search of the Fundamentals of Mind; Radman, Z., Ed.; Andrews UK Limited: Luton, UK, 2017; pp. 246–283. [Google Scholar]
- Smith, A.M.; Malo, S.A.; Laskowski, E.R.; Sabick, M.; Cooney, W.P.; Finnie, S.B.; Crews, D.J.; Eischen, J.J.; Hay, I.D.; Detling, N.J.; et al. A multidisciplinary study of the ‘yips’ phenomenon in golf. Sports Med. 2000, 30, 423–437. [Google Scholar] [CrossRef] [PubMed]
- Humphrey, G. The Story of Man’s Mind; Small, Maynard and Company: Boston, MA, USA, 1923; p. 109. [Google Scholar]
- Tyagi, A. A Principle of Least Computational Action (preliminary version). In Proceedings of the Workshop on Physics and Computation, Dallas, TX, USA, 4–6 October 1992; pp. 262–266. [Google Scholar]
- Tyagi, A. Energy-Time Trade-offs in VLSI Computations. In Proceedings of the Ninth Conference on Foundations of Software Technology & Theoretical Computer Science, Bangalore, India, 19–21 December 1989; pp. 301–311. [Google Scholar]
- Glăveanu, V.P. Habitual creativity: Revising habit, reconceptualizing creativity. Rev. Gen. Psychol. 2012, 16, 78–92. [Google Scholar] [CrossRef]
- Guida, A.; Gobet, F.; Tardieu, H.; Nicolas, S. How chunks, long-term working memory and templates offer a cognitive explanation for neuroimaging data on expertise acquisition: A two-stage framework. Brain Cogn. 2012, 79, 221–244. [Google Scholar] [CrossRef] [PubMed]
- Toner, J. Habitual reflexivity and skilled action. Body Soc. 2017, 23, 3–26. [Google Scholar] [CrossRef]
- Friston, K. The free-energy principle: A unified brain theory? Nat. Rev. Neurosci. 2010, 11, 127–138. [Google Scholar] [CrossRef] [PubMed]
- Friston, K.J.; Stephan, K.E. Free-energy and the brain. Synthese 2007, 159, 417–458. [Google Scholar] [CrossRef] [PubMed]
- Collell, G.; Fauquet, J. Brain activity and cognition: A connection from thermodynamics and information theory. Front. Psychol. 2015, 6, 818. [Google Scholar] [CrossRef] [PubMed]
- Fox, S. Reliable autonomous production systems: Combining industrial engineering methods and situation awareness modelling in critical realist design of autonomous production systems. Systems 2018, 6, 26. [Google Scholar] [CrossRef]
- Anderson, L.W.; Krathwohl, D.R. A Taxonomy for Learning, Teaching, and Assessing: A Revision of Bloom’s Taxonomy of Educational Objectives; Longman: New York, NY, USA, 2001. [Google Scholar]
- Dawson, W.R. Extensions to Bloom’s Taxonomy of Educational Objectives; Putney Publishing: Sidney, Australia, 1998. [Google Scholar]
- Ferris, T.L.J.; Aziz, S.M. A psychomotor skills extension to Bloom’s taxonomy of education objectives for engineering education. In Proceedings of the Exploring Innovation in Education and Research, Tainan, Taiwan, 1–5 March 2005. [Google Scholar]
- Uang, S.N.; Shih, T.S.; Chang, C.H.; Chang, S.M.; Tsai, C.J.; Deshpande, C.G. Exposure assessment of organic solvents for aircraft paint stripping and spraying workers. Sci. Total Environ. 2006, 356, 38–44. [Google Scholar] [CrossRef] [PubMed]
- Rohrer, D.; Taylor, K.; Pashler, H.; Wixted, J.T.; Cepeda, N.J. The effect of overlearning on long-term retention. Appl. Cogn. Psychol. 2005, 19, 361–374. [Google Scholar] [CrossRef]
- Wulf, G.; Shea, C.H. Understanding the role of augmented feedback: The good, the bad, and the ugly. In Skill Acquisition in Sport: Research, Theory and Practice; Williams, A.M., Hodges, N.J., Eds.; Routledge: London, UK, 2004; pp. 121–144. [Google Scholar]
- Kaufman, H.H.; Wiegand, R.L.; Tunick, R.H. Teaching surgeons to operate: Principles of psychomotor skills training. Acta Neurochir. 1987, 87, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Schmidt, R.A.; Lee, T.D. Motor Control and Learning, 4th ed.; Human Kinetics: Champaign, IL, USA, 2005. [Google Scholar]
- Epstein, S.R. Craft guilds, apprenticeship, and technological change in preindustrial Europe. J. Econ. Hist. 1998, 58, 684–713. [Google Scholar] [CrossRef]
- Doray, B. From Taylorism to Fordism; Free Association Books: London, UK, 1988. [Google Scholar]
- Taylor, F.W. The Principles of Scientific Management; Harper Brothers: New York, NY, USA, 1911. [Google Scholar]
- Oakland, J.S. Total Quality Management and Operational Excellence; Routledge: Abingdon, UK; London, UK, 2014. [Google Scholar]
- Parker, S.; Wall, T.D. Job and Work Design: Organizing Work to Promote Well-Being and Effectiveness; Sage: Thousand Oaks, CA, USA, 1998. [Google Scholar]
- Fox, S. Leapfrog skills: Combining vertical and horizontal multi-skills to overcome trade-offs that limit prosperity growth. Technol. Soc. 2016, 47, 129–139. [Google Scholar] [CrossRef]
- Teicholz, P. Labor-productivity declines in the construction industry: Causes and remedies (another look). AECbytes, 14 March 2013. [Google Scholar]
- Chung, K.H.; Ross, M.F. Differences in motivational properties between job enlargement and job enrichment. Acad. Manag. Rev. 1977, 2, 113–122. [Google Scholar] [CrossRef]
- Carvalko, J. The Techno-human Shell: A Jump in the Evolutionary Gap; Sunbury Press: Mechanicsburg, PA, USA, 2012. [Google Scholar]
- Halacy, D.S. Cyborg: Evolution of the Superman; Harper and Row Publishers: New York, NY, USA, 1965. [Google Scholar]
- Haraway, D.A. Cyborg Manifesto: Science, Technology, and Socialist-Feminism in the Late Twentieth Century. In Simians, Cyborgs and Women: The Reinvention of Nature; Routledge: New York, USA, 1991; pp. 150–182. [Google Scholar]
- Eveleth, R. Why did I implant a chip in my hand? My so-called cyborg life. Popular Science, 24 May 2016. [Google Scholar]
- Popescu, A. This $425 DIY Implant Will Make You a Cyborg: Cyborg Nest manufactures DIY kits meant to bring transhumanism to the masses. Bloomberg, 16 February 2017. [Google Scholar]
- Beckerle, P.; Christ, O.; Schürmann, T.; Vogt, J.; von Stryk, O.; Rinderknecht, S. A human-machine-centered design method for (powered) lower limb prosthetics. Robot. Auton. Syst. 2017, 95, 1–12. [Google Scholar] [CrossRef]
- Yan, T.; Cempini, M.; Oddo, C.M.; Vitiello, N. Review of assistive strategies in powered lower-limb orthoses and exoskeletons. Robot. Auton. Syst. 2015, 64, 120–136. [Google Scholar] [CrossRef]
- Thompson, A. Lowe’s is building an exoskeleton to help its workers lift heavy stuff. Popular Mechanics, 16 May 2017. [Google Scholar]
- Nilsson, M.; Ingvast, J.; Wikander, J.; von Holst, H. The Soft Extra Muscle system for improving the grasping capability in neurological rehabilitation. In Proceedings of the IEEE-EMBS Conference on Biomedical Engineering and Sciences, Langkawi, Malaysia, 17–19 December 2012; pp. 412–417. [Google Scholar]
- Novak, D.; Riener, R. A survey of sensor fusion methods in wearable robotics. Robot. Auton. Syst. 2015, 73, 155–170. [Google Scholar] [CrossRef]
- Clement, R.G.E.; Bugler, K.E.; Oliver, C.W. Bionic prosthetic hands: A review of present technology and future aspirations. Surgeon 2011, 9, 336–340. [Google Scholar] [CrossRef] [PubMed]
- Heo, P.; Gu, G.M.; Lee, S.J.; Rhee, K.; Kim, J. Current hand exoskeleton technologies for rehabilitation and assistive engineering. Int. J. Precis. Eng. Manuf. 2012, 13, 807–824. [Google Scholar] [CrossRef]
- De Almeida Ribeiro, P.R.; Brasil, F.L.; Witkowski, M.; Shiman, F.; Cipriani, C.; Vitiello, N.; Carrozza, M.C.; Soekadar, S.R. Controlling assistive machines in paralysis using brain waves and other biosignals. Adv. Hum. Comput. Interact. 2013, 2013, 1–9. [Google Scholar] [CrossRef]
- Matsuhashi, M.; Hallett, M. The timing of the conscious intention to move. Eur. J. Neurosci. 2008, 28, 2344–2351. [Google Scholar] [CrossRef] [PubMed]
- Lee, K.; Liu, D.; Perroud, L.; Chavarriaga, R.; Millán, J.D.R. A brain-controlled exoskeleton with cascaded event-related desynchronization classifiers. Robot. Auton. Syst. 2017, 90, 15–23. [Google Scholar] [CrossRef]
- Chiviacowsky, S.; Wulf, G. Self-controlled feedback: Does it enhance learning because performers get feedback when they need it? Res. Q. Exerc. Sport 2002, 73, 408–415. [Google Scholar] [CrossRef] [PubMed]
- Gosselin, F.; Bouchigny, S.; MéGard, C.; Taha, F.; Delcampe, P.; d’Hauthuille, C. Haptic systems for training sensorimotor skills: A use case in surgery. Robot. Auton. Syst. 2013, 61, 380–389. [Google Scholar] [CrossRef]
- Constantinescu, C.; Popescu, D.; Muresan, P.C.; Stana, S.I. Exoskeleton-centered Process Optimization in Advanced Factory Environments. Procedia CIRP 2016, 41, 740–745. [Google Scholar] [CrossRef]
- Umetani, Y.; Yamada, Y.; Morizono, T.; Yoshida, T.; Aoki, S. “Skil Mate” wearable exoskeleton robot. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Tokyo, Japan, 12–15 October 1999; pp. 984–988. [Google Scholar]
- Dinh, B.K.; Xiloyannis, M.; Cappello, L.; Antuvan, C.W.; Yen, S.C.; Masia, L. Adaptive backlash compensation in upper limb soft wearable exoskeletons. Robot. Auton. Syst. 2017, 92, 173–186. [Google Scholar] [CrossRef]
- Zhou, L.; Li, Y.; Bai, S. A human-centered design optimization approach for robotic exoskeletons through biomechanical simulation. Robot. Auton. Syst. 2017, 91, 337–347. [Google Scholar] [CrossRef]
- Fallon, J.B.; Irvine, D.R.; Shepherd, R.K. Cochlear implants and brain plasticity. Hear. Res. 2008, 238, 110–117. [Google Scholar] [CrossRef] [PubMed]
- Kral, A.; Sharma, A. Developmental neuroplasticity after cochlear implantation. Trends Neurosci. 2012, 35, 111–122. [Google Scholar] [CrossRef] [PubMed]
- Brooks, R.A. Elephants don’t play chess. Robot. Auton. Syst. 1990, 6, 3–15. [Google Scholar] [CrossRef]
- Moravec, H. Mind Children: The Future of Robot and Human Intelligence; Harvard University Press: Cambridge, MA, USA, 1988. [Google Scholar]
- Abbeel, P.; Ng, A.Y. Apprenticeship learning via inverse reinforcement learning. In Proceedings of the 21st International Conference on Machine Learning, Banff, AB, Canada, 4–8 July 2004; pp. 1–8. [Google Scholar]
- Pignat, E.; Calinon, S. Learning adaptive dressing assistance from human demonstration. Robot. Auton. Syst. 2017, 93, 61–75. [Google Scholar] [CrossRef]
- Bentivegna, D.C.; Atkeson, C.G.; Cheng, G. Learning tasks from observation and practice. Robot. Auton. Syst. 2004, 47, 163–169. [Google Scholar] [CrossRef]
- Gu, Y.; Sheng, W.; Crick, C.; Ou, Y. Automated assembly skill acquisition and implementation through human demonstration. Robot. Auton. Syst. 2018, 99, 1–16. [Google Scholar] [CrossRef]
- Billard, A.; Calinon, S.; Dillmann, R.; Schaal, S. Robot programming by demonstration. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1371–1394. [Google Scholar]
- Vishwakarma, D.K.; Kapoor, R.; Dhiman, A. A proposed unified framework for the recognition of human activity by exploiting the characteristics of action dynamics. Robot. Auton. Syst. 2016, 77, 25–38. [Google Scholar] [CrossRef]
- Calinon, S.; Billard, A. Active teaching in robot programming by demonstration. In Proceedings of the IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Jeju, Korea, 26–29 August 2007; pp. 702–707. [Google Scholar]
- Lockerd, A.; Breazeal, C. Tutelage and socially guided robot learning. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, 28 September–2 October 2004; Volume 4, pp. 3475–3480. [Google Scholar]
- Nehaniv, C.L. Nine Billion Correspondence Problems. In Imitation and Social Learning in Robots, Humans and Animals; Nehaniv, C.L., Dautenhahn, K., Eds.; Cambridge University Press: Cambridge, UK, 2007; pp. 35–42. [Google Scholar]
- Muñoz, P.; R-Moreno, M.D.; Barrero, D.F. Unified framework for path-planning and task-planning for autonomous robots. Robot. Auton. Syst. 2016, 82, 1–14. [Google Scholar] [CrossRef]
- Wolfe, J.A.; Marthi, B.; Russell, S.J. Combined task and motion planning for mobile manipulation. In Proceedings of the 20th International Conference Automated Planning and Scheduling (ICAPS 2010), Toronto, ON, Canada, 12–16 May 2010; pp. 254–258. [Google Scholar]
- Decker, M.; Fischer, M.; Ott, I. Service robotics and human labor: A first technology assessment of substitution and cooperation. Robot. Auton. Syst. 2017, 87, 348–354. [Google Scholar] [CrossRef]
- McEvoy, M.A.; Correll, N. Materials that couple sensing, actuation, computation, and communication. Science 2015, 347, 6228. [Google Scholar] [CrossRef] [PubMed]
- Müller, V.C.; Hoffmann, M. What is morphological computation? On how the body contributes to cognition and control. Artif. Life 2017, 23, 1–24. [Google Scholar] [CrossRef] [PubMed]
- Hauser, H.; Ijspeert, A.; Füchslin, R.; Pfeifer, R.; Maass, W. The role of feedback in morphological computation with compliant bodies. Biol. Cybern. 2012, 106, 595–613. [Google Scholar] [CrossRef] [PubMed]
- Kurowski, S.; von Stryk, O. A systematic approach to the design of embodiment with application to bio-inspired compliant legged robots. In Proceedings of the Intelligent Robots and Systems Conference, Hamburg, Germany, 28 September–2 October 2015; Zhang, J., Knoll, A., Eds.; IEEE: New York, NY, USA, 2015; pp. 3771–3778. [Google Scholar]
- Amigoni, F.; Luperto, M.; Schiaffonati, V. Toward generalization of experimental results for autonomous robots. Robot. Auton. Syst. 2017, 90, 4–14. [Google Scholar] [CrossRef]
- Fernandez-Gauna, B.; Lopez-Guede, J.M.; Graña, M. Transfer learning with partially constrained models: Application to reinforcement learning of linked multicomponent robot system control. Robot. Auton. Syst. 2013, 61, 694–703. [Google Scholar] [CrossRef]
- Lu, J.; Behbood, V.; Hao, P.; Zuo, H.; Xue, S.; Zhang, G. Transfer learning using computational intelligence: A survey. Knowl. Based Syst. 2015, 80, 14–23. [Google Scholar] [CrossRef]
- Tay, N.N.W.; Botzheim, J.; Kubota, N. Joint probabilistic approach for real-time face recognition with transfer learning. Robot. Auton. Syst. 2016, 75, 409–421. [Google Scholar] [CrossRef]
- Rothfeder, J. At Toyota, the automation is human-powered. The Fast Company, 5 September 2017. [Google Scholar]
- Giffi, C.; Dollar, B.; Drew, M.; McNelly, J.; Carrick, G.; Gangula, B. The Skills Gap in US Manufacturing 2015 and Beyond; Deloitte Development LLC: Washington, DC, USA, 2015. [Google Scholar]
- Fox, S.; Kotelba, A.; Niskanen, I. Cognitive Factories: Modeling Situated Entropy in Physical Work Carried Out by Humans and Robots. Entropy 2018, 20, 659. [Google Scholar] [CrossRef]
- Fox, S. A preliminary methodology for Generative Production Systems. J. Manuf. Technol. Manag. 2011, 22, 348–364. [Google Scholar] [CrossRef]
- Leaney, P.; Wittenberg, G. Design for assembling: The evaluation methods of Hitachi, Boothroyd and Lucas. Assem. Autom. 1992, 12, 8–17. [Google Scholar] [CrossRef]
- Andersen, T.B.; Jensen, P.S.; Skovsgaard, C.V. The heavy plow and the agricultural revolution in Medieval Europe. J. Dev. Econ. 2016, 118, 133–149. [Google Scholar] [CrossRef]
- White, L. Medieval Technology and Social Change; Oxford University Press: Oxford, UK, 1962. [Google Scholar]
- Armstrong, T.; Buckle, P.; Fine, L.; Hagberg, M.; Haring-Sweeney, M.; Martin, B.; Punnett, L.; Silverstein, B.; Sjøgaard, G.; Theorell, T.; et al. Musculoskeletal Disorders: Work-related Risk Factors and Prevention. Int. J. Occup. Environ. Health 1996, 2, 239–246. [Google Scholar]
- Schleip, R.; Müller, D.G. Training principles for fascial connective tissues: Scientific foundation and suggested practical applications. J. Bodyw. Mov. Ther. 2013, 17, 103–115. [Google Scholar] [CrossRef] [PubMed]
- Ahmad Shah, Z.A.; Singh, R.; Dar, M.A.; Matoo, J.M.; Mir, R. An analysis of socio-personal characteristics of apple growers and their attitude towards apple cultivation in District Shopian of J&K. Adv. Res. 2017, 12, 1–11. [Google Scholar]
- Davidson, J.R.; Silwal, A.; Hohimer, C.J.; Karkee, M.; Mo, C.; Zhang, Q. Proof-of-concept of a robotic apple harvester. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 634–639. [Google Scholar]
- Boothroyd, G.; Dewhurst, P.; Knight, W.A. Product Design for Manufacture and Assembly; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Kardos, C.; Kovács, A.; Váncza, J. Decomposition approach to optimal feature-based assembly planning. CIRP Ann. Manuf. Technol. 2017, 66, 417–420. [Google Scholar] [CrossRef]
- Bahnes, N.; Kechar, B.; Haffaf, H. Cooperation between Intelligent Autonomous Vehicles to enhance container terminal operations. J. Innov. Digit. Ecosyst. 2016, 3, 22–29. [Google Scholar] [CrossRef]
- Colgate, J.E.; Peshkin, M.; Klostermeyer, S.H. Intelligent assist devices in industrial applications: A review. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003), Las Vegas, NV, USA, 27–31 October 2003; pp. 2516–2521. [Google Scholar]
- Davidekova, M.; Mjartan, M.; Greguš, M. Implementing virtual reality into employee education in production sector of automotive industry: Creating worker training for assembling car dashboard in virtual reality. Ad Alta J. Interdiscip. Res. 2017, 7, 185–190. [Google Scholar]
- Schweder, J. Turning out lights on the factory floor. Automation World, 22 February 2017. [Google Scholar]
- Stacey, K.; Nicolaou, A. Stitched up by robots. Financial Times, 18 July 2017. [Google Scholar]
- Weick, K.E. Small wins. Am. Psychol. 1984, 39, 40–49. [Google Scholar] [CrossRef]
- Amirapu, A.; Subramania, A. Manufacturing futures: For India, Reversing the process of de-industrialisation will be hard. Business Standard, 9 May 2014. [Google Scholar]
- Dasgupta, S.; Singh, A. Manufacturing, Services and Premature Deindustrialization in Developing Countries: A Kaldorian Analysis; UNU-WIDER, United Nations University Research Papers 2006, No. 2006/49; UNU: Tokyo, Japan, 2006. [Google Scholar]
- Rodrik, D. Premature deindustrialization. J. Econ. Growth 2016, 21, 1–33. [Google Scholar] [CrossRef]
- Fox, S.; Alptekin, B. A taxonomy of manufacturing distributions and their comparative relations to sustainability. J. Clean. Prod. 2018, 172, 1823–1834. [Google Scholar] [CrossRef]
- Elliot, L. Robots will not lead to fewer jobs—But the hollowing out of the middle class. The Guardian, 20 August 2017. [Google Scholar]
- Kotlikoff, L.J.; Burns, S. The Clash of Generations: Saving Ourselves, Our Kids, and Our Economy; MIT Press: Cambridge, MA, USA, 2012. [Google Scholar]
- Duffy, J.; Papageorgiou, C.; Perez-Sebastian, F. Capital-skill complementarity? Evidence from a panel of countries. Rev. Econ. Stat. 2004, 86, 327–344. [Google Scholar] [CrossRef]
- Griliches, Z. Capital-skill complementarity. Rev. Econ. Stat. 1969, 51, 465–468. [Google Scholar] [CrossRef]
- Desilver, D. Most Americans Unaware that as U.S. Manufacturing Jobs Have Disappeared, Output Has Grown; Pew Research Center: Washington, DC, USA, 2017. [Google Scholar]
- Elkington, J. Towards the sustainable corporation: Win–win–win business strategies for sustainable development. Calif. Manag. Rev. 1994, 36, 90–100. [Google Scholar] [CrossRef]
- Kaunitz, A.M. Are hospital claims about the robotic approach to gynecologic surgery based on reliable data—Or mostly hype? OBG Manag. 2012, 24, 55–56. [Google Scholar]
- Schiavone, M.B.; Kuo, E.C.; Naumann, R.W.; Burke, W.M.; Lewin, S.N.; Neugut, A.I.; Hershman, D.L.; Herzog, T.J.; Wright, J.D. The commercialization of robotic surgery: Unsubstantiated marketing of gynecologic surgery by hospitals. Am. J. Obstet. Gynecol. 2012, 207, 174-e1–174-e7. [Google Scholar] [CrossRef] [PubMed]
- Zalasiewicz, J.; Williams, M.; Waters, C.N.; Barnosky, A.D.; Palmesino, J.; Rönnskog, A.S.; Edgeworth, M.; Neal, C.; Cearreta, A.; Ellis, E.C.; et al. Scale and diversity of the physical technosphere. Anthr. Rev. 2017, 4, 9–22. [Google Scholar]
- Harbour, R.; Scemama, S. Surprise: Robots aren’t replacing humans in key areas of manufacturing. Forbes, 3 February 2017. [Google Scholar]
- Gibbs, S. Mercedes-Benz Swaps Robots for People on Its Assembly Lines; The Guardian: London, UK, 2016. [Google Scholar]
- Abbott, R.; Bogenschneider, B. Should Robots Pay Taxes? Tax Policy in the Age of Automation. Harv. Law Policy Rev. 2018, 12. [Google Scholar] [CrossRef]
- Fox, S. Domesticating artificial intelligence: Expanding human self-expression through applications of artificial intelligence in prosumption. J. Consum. Cult. 2018, 18, 169–183. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Worker Type | Autonomous Psychomotor Work Skills | |
|---|---|---|
| Internal Action and External Action | Improvement Challenges | |
| Human | Internal: Little, if any, conscious thought required in familiar settings. Internal: Little, if any, conscious through required in new settings. External: No supervision required External: Irreducible simplicity of fluid elegance in motions | Human autonomous psychomotor skills are in short supply. Requires instruction with demonstration followed by practice with feedback to enable autonomous psychomotor work skills. Yet, there are shortages of trainers who can provide demonstration and feedback. |
| Cyborg | Internal: More conscious thought required in familiar settings. Internal: More conscious through required in new settings. External: No supervision required External: More complexity and less elegance in motions | Enhancing technologies can immediately increase some human capabilities involved in psychomotor work skills, but they can increase the amount of conscious thought required. |
| Robot | Internal: Computational effort required in familiar settings. Internal: More computational effort required in new settings. External: Supervision required in new settings. External: Irreducible simplicity of fluid elegance in motions is possible. | Soft robotics, morphological computation, and learning by demonstration are not equal to the human capacity for autonomous psychomotor work skills enabled by least action internally and least action externally. |
| Worker Type | Work Example | Worker Type Advantage |
|---|---|---|
| Human | Agricultural work on slippery undulating sloping ground | Si is lowest by human reference to appropriate w for human general psychomotor abilities and Se is lowest because only human body weight is being maneuvered and it is maneuvered using human general psychomotor abilities. |
| Cyborg | One-of-a-kind construction work | Si is lowest by reference to appropriate I through AR, if it does not introduce higher than human cH(t), and Se is lowest because physical motion is supported by exoskeletons, if they do not introduce higher than human cI(t) |
| Robot | Soft product manufacturing work | Robotic innovations that minimize both Si and Se, rather than reducing one but increasing the other, can introduce lower S than very labor-intensive human practices that are not well-suited to improvement with cyborg technologies. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fox, S.; Kotelba, A. Principle of Least Psychomotor Action: Modelling Situated Entropy in Optimization of Psychomotor Work Involving Human, Cyborg and Robot Workers. Entropy 2018, 20, 836. https://doi.org/10.3390/e20110836
Fox S, Kotelba A. Principle of Least Psychomotor Action: Modelling Situated Entropy in Optimization of Psychomotor Work Involving Human, Cyborg and Robot Workers. Entropy. 2018; 20(11):836. https://doi.org/10.3390/e20110836
Chicago/Turabian StyleFox, Stephen, and Adrian Kotelba. 2018. "Principle of Least Psychomotor Action: Modelling Situated Entropy in Optimization of Psychomotor Work Involving Human, Cyborg and Robot Workers" Entropy 20, no. 11: 836. https://doi.org/10.3390/e20110836
APA StyleFox, S., & Kotelba, A. (2018). Principle of Least Psychomotor Action: Modelling Situated Entropy in Optimization of Psychomotor Work Involving Human, Cyborg and Robot Workers. Entropy, 20(11), 836. https://doi.org/10.3390/e20110836