1. Introduction
The idea that all finite observers are characterized by uncertainty and must pay, in energetic currency, to reduce their uncertainty was introduced into classical physics by Boltzmann [
1]. Shannon [
2] showed that information obtained from observations can be naturally quantized into answers to yes/no questions and hence measured in bits. Landauer [
3,
4] then showed that such information has been “obtained” and is available for future use only after it has been irreversibly recorded on some physical medium. The resulting classical theory of
observation—the exchange of energy for information—states that, for any finite, physically implemented observer
O, each bit of irreversibly recorded uncertainty reduction (equivalently, each bit of information gain) costs
, where
is Boltzmann’s constant,
T is temperature, and
ln2, is a measure of
O’s information-aquisition efficiency that can for simplicity be considered constant. As all classical observations in practice take place at
, this energetic cost is always positive. This classical theory of observation has two familiar practical consequences: observations are limited to finite resolution and records of their outcomes to finite bit strings, and only some finite number of such finite-resolution observations can be made in any finite time.
The consequences of this classical, thermodynamic limitation to finite, finite-resolution observations have been investigated in both classical and quantum settings, particularly as they bear on issues of noise (i.e., uncontrolled degrees of freedom) and measurement uncertainty. It has been known since the pioneering work of Spekkens and colleagues [
5,
6], for example, that classical statistical mechanics reproduces wave-packet quantum theory in the special case in which wave packets are Gaussian. Jennings and Leifer [
7] review this and other work, showing that classical statistical mechanics reproduces “quantum” features and behavior including the uncertainty principle, non-commutativity of measurements, state teleportation and the no-cloning theorem when a finite-resource restriction limiting the number and resolution of measurements is imposed. Krechmer [
8] shows that “quantum” measurement disturbance and non-commutativity of observables result whenever two measurement devices are calibrated using the same physical standard.
My aim here is to investigate a different set of consequences of the classical thermodynamic restriction to finite energy resources and hence to finite, finite-resolution observations: its consequences for an observer’s ability to
identify the physical system being observed. The question of system identification has largely been neglected by theoretical physics, although it is of obvious practical relevance to experimental physics. Discussions of quantum measurement, for example, standardly examine the interaction between an observer and a fixed, well-defined system that is typically stipulated a priori by stipulating its Hilbert space (for reviews, see [
9,
10]). System identification has received more attention from engineers and computer scientists. Moore, for example, proved in 1956 that finite, finite-resolution observations cannot fully determine the state space of an otherwise-uncharacterized physical system; in particular, they cannot determine its state-space dimension
d ([
11] Theorem 2; see [
12,
13] for discussion). This result underlies the proven unsolvability of the halting problem in classical computer science [
14]. Both of these results, however, rely on limits in which numbers of degrees of freedom become arbitrarily large, and neither considers the quantitative cost of system identification.
Here I characterize the thermodynamic cost of system identification in a general, operational framework covering both classical and quantum systems and investigate some of its consequences. The next section characterizes the system identification problem operationally as a search problem constrained by a finite-resource restriction. The consequences of this restriction for system identification and characterization are then discussed (
Section 3), and the finite-resource restriction is shown to forbid the arbitrary refinement of state spaces of observed systems to assumed “objective” or “ontic” state spaces even when these are (
Section 4). I then focus on two types of system-identification problems that regularly arise in practice: the identification of a single system at multiple, significantly separated times (
Section 5) and the identification of a single system by multiple, spacelike-separated observers (
Section 6). I show in each case that classical correlations of measurement outcomes are insufficient, in principle, for reliable system identification. A similar point regarding the second class of problems has been made previously by Grinbaum [
15]. Violations of Leggett–Garg [
16] and Bell [
17] inequalities, respectively, thus arise naturally as requirements for reliable system identification in these settings. These results extend and elaborate on previous work of a more systems-theoretic nature [
12,
13,
18,
19]. The general theory of observation as a physical process, including the central role of the observer’s memory as an encoding of observational outcomes, has also recently been discussed by Kupervasser [
20].
2. Formalizing System Identification as a Search Process
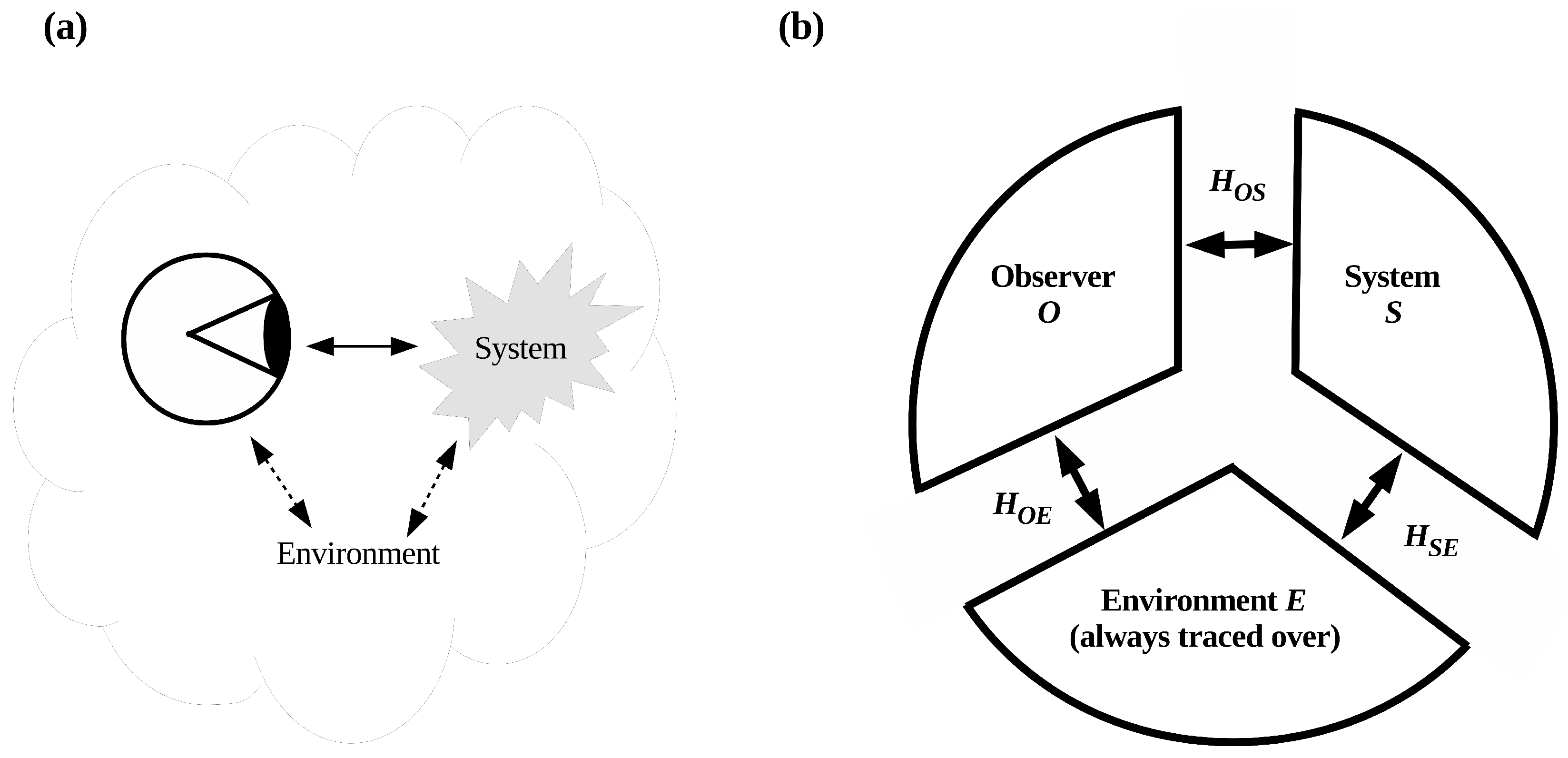
Characterizing the thermodynamic cost of system identification requires redescribing observation in a way that makes the process of system identification explicit. Consider the standard, classical “picture” of observation shown in
Figure 1. Here the “observer” is a physical system that interacts with a “system of interest” to obtain observational outcomes. Both observer and system are embedded in a surrounding environment, which can be regarded as “everything else” in the universe. This classical picture of observation is carried over unchanged into quantum theory, where the “observer” now terminates the von Neumann chain [
21] by recording their outcome(s) in a thermodynamically irreversible way. It provides, by including the surrounding environment, the setting for environmental decoherence [
22,
23,
24,
25,
26,
27,
28]. Tegmark has emphasized that the observer
O in this setting comprises
only the degrees of freedom that record observational outcomes, while the system
S comprises only the “pointer” degrees of freedom that specify these outcomes; all other degrees of freedom are considered part of the “environment”
E and traced over [
29]. Tracing out the environment assures that information about the state of
S reaches
O only through the channel defined by the
interaction, specified in
Figure 1b by the Hamiltonian
. The alternative channel via the environment
E, given by the Hamiltonian
, contributes only classical noise. In the alternative “environment as witness” formulation of decoherence developed by Zurek and colleagues [
30,
31,
32,
33],
O is assumed to be located sufficiently far from
S that
. In this formulation, all information about
S obtained by
O flows through the channel
. The state
of the environment is regarded as “encoding” this information, with the encoding of information about the positions of macroscopic objects by the ambient photon field as the canonical example.
This conventional conception of observation, even when made precise using the formalism of decoherence, tells us nothing about how the observer
identifies the system of interest. The system
S is given a priori in
Figure 1: the interactions
,
,
,
, and
are all assumed to be given and well-defined. To include system identification in the picture, it is useful to describe it in operational terms. Suppose I want Alice to report the observational outcome registered by a particular macroscopic apparatus located in a laboratory filled with many other systems. How much information do I need to give Alice to assure that she reports the outcome from the
right apparatus? In this scenario, the finite-resource restriction on Alice is clear: I can give Alice at most a finite description of the apparatus that I want her to report an outcome from. I could instruct her, for example, to locate a black laptop labeled “data 3,” running linux, with a counter window open, and to report the outcome displayed in the counter window. I could add that “data 3” is connected to an ADC in the third rack from the right wall. Alice must then enter the laboratory and
look for, using observational means at her disposal, an apparatus matching my finite description. The informational basis of this operational scenario can be made precise as follows:
Finite-resource restriction: No observer can employ more that a finite number of finite-resolution observational outcomes to identify a system of interest.
Classically, an observer subject to the finite-resource restriction has only a finite number of finite-resolution criteria for system identification; in quantum theory, this corresponds to a finite number of discrete-valued observables. Such criteria or observables can be considered to be binary without loss of generality.
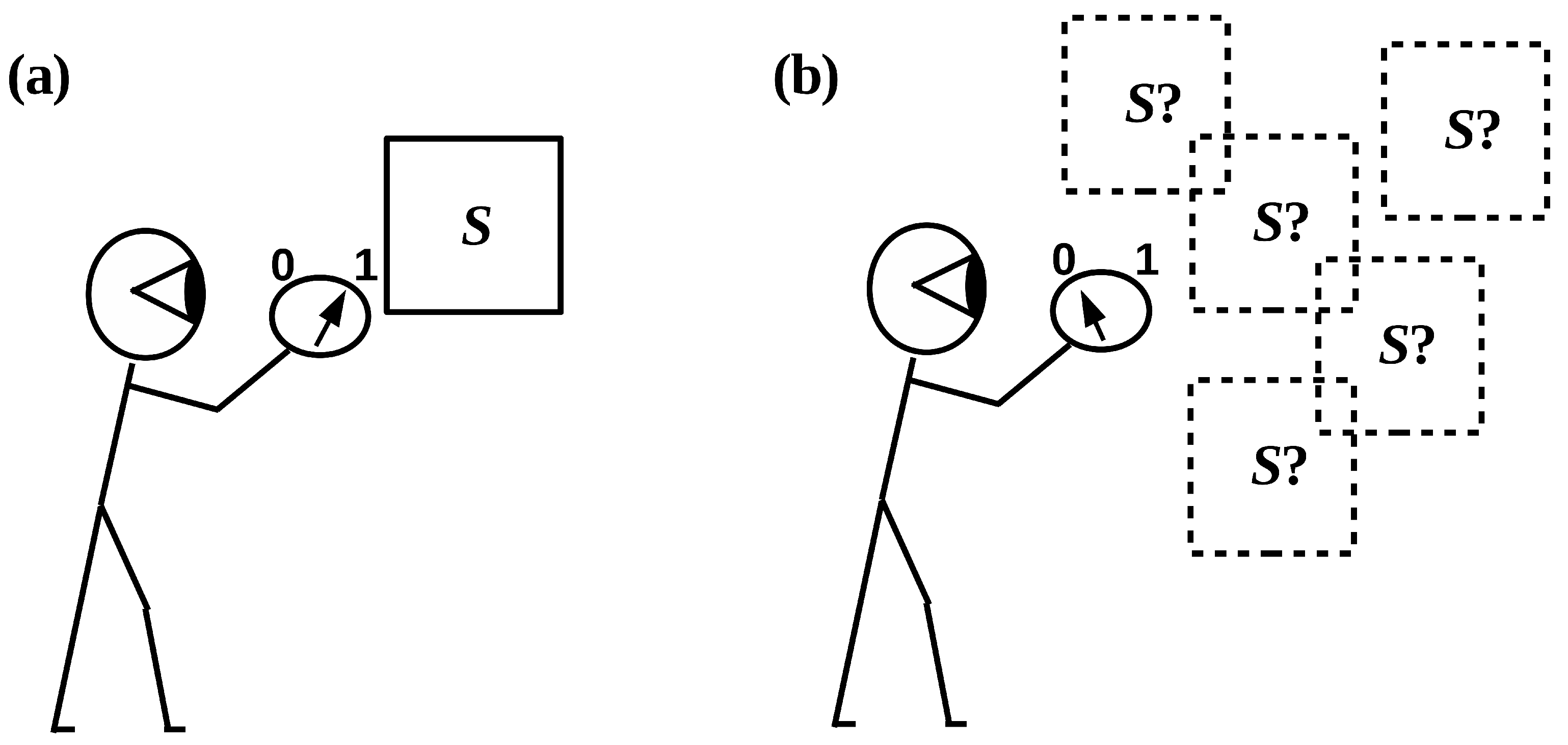
It is obviously circular to assume that, when Alice enters the laboratory, she can identify the apparatus satisfying her finite criteria (or finite observables) without having to look at anything else: this is equivalent to assuming that the apparatus is given a priori and hence does not need to be identified. To
identify the apparatus
S, Alice must
distinguish it, using her criteria/observables, from everything else in the laboratory, i.e., from
E. Alice must, in other words, employ her criteria/observables to
search the combined system
until she finds
S. Hence, she is in the position illustrated in
Figure 2b, not that of
Figure 2a as is standardly assumed.
To make this idea of searching
W for
S precise, suppose as above that an observer
O and world
W are given as collections of physical degrees of freedom, and assume for the present that they are quantum systems characterized by Hilbert spaces
and
, respectively. Suppose further that
O can perform
n distinct (but not necessarily orthogonal) binary-outcome measurements
on
W, that
O’s thermodynamic cost per bit of recorded outcome is
as above, that deploying the
has no other energetic consequences, and that
O’s interaction with
W consists entirely of deploying the
. In this case, each of the
can be regarded as extracting one bit of information from
W and exhausting
of waste heat into
W. The operations
can be regarded informally as “questions to Nature” such as “is what I see before me a laptop?” or “is it black?” and formally as Hermitian operators on
in the usual way. No assumption need be made at this point about whether the
commute; this question is addressed in
Section 3. For simplicity, suppose
O deploys the
one at a time in the fixed order
, that each of the
is deployed for a fixed time
, the time required for
O to record one bit, and that
O makes
m cycles of measurements. The total elapsed time during which
O makes measurements on
W is then
. Taking the
interaction to be given by a Hamiltonian operator
on
, the total action is
To make
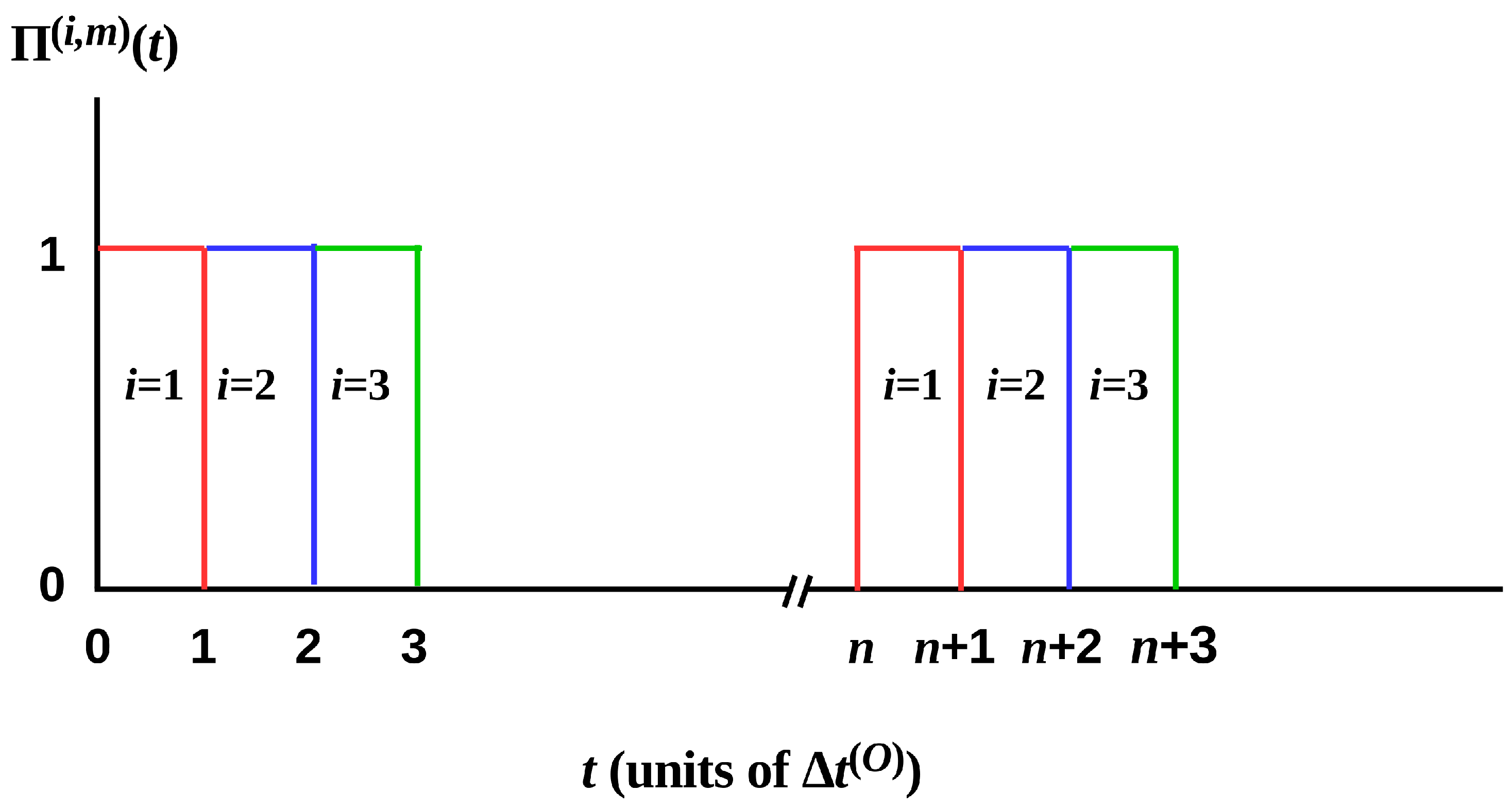
explicit in the simplest case of sequential, equal-duration measurements, let
be the rectangular Pi function with offset
i,
, duty cycle
n, and the number of cycles
m, i.e
where
This
is a sequence, starting at
, of
m unit-height rectangular pulses with width
and separation
as shown in
Figure 3. In this case, we can write, for
,
with the heat dissipated by the action of the
kth measurement operator during the first
cycles of measurement given by
If the requirement of a fixed sequence of equal-duration measurements is now dropped and
O is simply assumed to make
N total observations, Equation (
3) can be generalized, for
, to
subject to the constraints that, at all
t,
and, for any positive integer
,
Here the function
is naturally interpreted as the probability of deploying the measurement
at
t. The sequence of outcomes obtained will depend on the
; however, the incremental heat dissipation, expressed in Equation (
7), of the measurements will not.
With
finite,
t can be treated as having only integer values
and hence regarded as a counter. This counter must be internal to
O, as otherwise the values of
t would be observational outcomes obtained from an external clock by some subset of the
and the above representation would be circular. The record of
O’s
N observations can, in this case, be represented as
Table 1 indexed by integer values of
t:
A table of this form contains all of the information about W available to O following N observations. The energetic cost of these data to O is , which is dissipated into W as waste heat. The counter t can, alternatively, be regarded as counting sets of k simultaneously measurable outcomes obtained “in parallel” at a cost of ; however, here we will maintain the convention that outcomes are obtained sequentially at discrete time steps.
As noted above, finite observations at finite resolution cannot fully determine the state space of an otherwise-uncharacterized system [
11]. The only information about
W available to
O are the outcomes
of
N finite-resolution observations; hence,
O cannot determine the state space of
W, i.e., the assumed Hilbert space
or even its dimension
, and
ipso facto can specify the measurements
being performed on
W only operationally. The complete set of possible outcomes of the
are, however, fully specified: each action with
produces an outcome
. Associating each of these
with a unit basis vector
constructs a binary space
with dimension
(equality if the
are orthogonal and all are employed at least once), which we can call the
apparent or
observable state space of
W for
O. Each “observation” by
O can, therefore, be thought of not as an action with some
on
W but as an operation on
with a binary-valued POVM
that selects the same outcome
as
. The Hilbert spaces standardly employed in quantum theory are constructed in this way using possible outcomes as basis vectors and are hence “apparent” in this sense. The operators
are, similarly, standardly defined in terms of the outcomes they produce, i.e., as operators on such apparent state spaces; in this case, the relation
can be viewed as operationally defining
. This standard practice justifies our starting assumption that
O and
W can be treated as quantum systems. The same formalism can be employed to represent finite, finite-resolution measurements of classical systems by requiring that all states be Gaussian [
6,
7].
3. Distinguishing Reference from Pointer Degrees of Freedom
We now turn to the question of commutativity requirements for the . To be of empirical interest, a “system” S must (1) be distinguishable from its surroundings, (2) be sufficiently persistent in time to permit multiple observations (at minimum, “preparation” followed by observation), and (3) occupy more than one state. Determining the state of S at multiple times requires an ability to distinguish S from its surroundings, i.e., to identifyS, at multiple times. Hence, any system S of empirical interest can be decomposed as , where the generalized “pointer” component P indicates the system’s time-varying state, and the remaining “reference” component R permits, by remaining in a time-invariant state , re-identification of S at multiple times. For ordinary items of laboratory apparatus like voltmeters or oscilloscopes, size, shape, mass, and the layout of controls and displays on the surface are components of R and their fixed, system-identifying values are components of , while the position of the apparatus, what the leads are connected to, control settings, and what is indicated on the displays are components of P. The state of S is then given by with fixed and only free to vary. Requiring S to be identifiable by observation is thus requiring to be separable as . If my laptop’s mass or the color of its exterior casing, for example, become entangled with what is displayed in one of its windows, I will no longer be able to identify it by observation.
This requirement of re-identifiability can be formulated using Zurek’s notion of a “predictability sieve” [
28], a criterion that allows the future state of a system, here the state
of the time-invariant reference component
R, to be predicted with confidence. Predictability is only assured if, for all
i,
where the measurement operators
act on
R but not
P (cf. [
28]; Equation 4.41). In practice, it is sufficient that, for all
i,
for some sufficiently small
over the course of an experiment involving multiple observations. Given Equation (
5), the predictability sieve condition expressed in Equation (
8) requires that system identification using the
does not disturb system identity and that pointer-state measurements using some set of measurement operators
that act only on
P do not disrupt system identification, i.e.,
for all
. Nothing, however, requires the pointer measurements
to all mutually commute, and they do not, for example, if calibration is included ([
8] or
Section 5 below). With these definitions, system
identification is distinct from system
preparation; operations employed for preparation must preserve system identity and thus must commute with the
, but need not, and in general will not, commute with the
. Preparation and observation of the “pointer state”
of
P will be considered equivalent in what follows.
In terms of the equivalent operators defined on the apparent state space , an “observable system” S in W can now be operationally defined as
Definition 1. An observable system S in W is a collection of mutually commuting POVMs defined on the apparent state space with specified outcomes that measure “reference” degrees of freedom of W that are fixed and no longer free in S and hence “identify” S, together with a distinct collection of POVMs defined on with unspecified binary outcomes that measure “pointer” degrees of freedom of W that remain free in S, where for each , for every .
Note that, while O and W are collections of degrees of freedom and are hence “ontic” entities, observable systems are collections of operations and outcomes and are hence in some sense “epistemic” entities. The notations “S,” “R,” “P,” and, below, “E” will be maintained for consistency with the literature, and to recognize that in practice systems are standardly defined in terms of observational outcomes as noted above.
The
l pointer degrees of freedom of
S comprise its pointer
P and their measured outcome values constitute its pointer states
. While the
selecting pointer outcomes are not required to commute, at least pairs of pointer outcomes must be compatible in any “interesting” system (an EPR/Bell experiment, for example, requires simultaneous measurement of two pointer states, the “measurement setting” and the outcome, by each observer (
Section 6)). The collection
of
k specified (POVM, outcome) pairs specifies the pointer-state independent reference component
R and its time-invariant state
. We require that
and
. For macroscopic systems such as laboratory apparatus, the number of pointer degrees of freedom
. Hence, the number of reference degrees of freedom
; this will be assumed in what follows.
Two observable systems
S and
are discernible in isolation only if they differ by at least one reference (POVM, outcome) pair. Every observable system
S has a
complement that is the maximal observable system that does not overlap
S. In the limit
,
, i.e.,
as defined above. This limit cannot, clearly, be reached with finite observational resources; the consequences of this are considered in
Section 4 below.
Several remarks are in order:
Remark 1. Observable systems are defined here in terms of both the assumed partition of “the universe” into O and W and the operations employed by O to identify them. They are, therefore, observer-relative in the sense defined by Rovelli [35] for quantum states. However, as noted above, the present considerations apply to both classical and quantum systems provided the finite-resource restriction is respected. This observer-relativity naturally suggests counterfactual indefiniteness, i.e., that “unidentified systems have no states” (cf. [36]), regardless of the equations of motion they obey while being observed. Remark 2. The “world” W is not an observable system. As the notion of “system identification” loses any operational meaning.
Remark 3. The apparent state space coarse-grains W. As will be made precise in the next section, unless (hence effectively, ), waste heat cannot be dissipated by O and commutativity of observables breaks down. This corresponds to the “large environment” assumption of decoherence.
Remark 4. No assumption is made that W exhibits objective classical randomness. The characterization of the energetic cost of observation as waste heat reflects O’s objective uncertainty about the distribution of this energetic input across the degrees of freedom of W.
Remark 5. The requirement that every commutes with all enables repeated pointer measurements to have the same outcome, and hence enables “ideal measurements” as defined by Cabello [37], provided calibration procedures are implemented as discussed in Section 5. Remark 6. The support of the and in can be considered the apparent or observable state space of S; again, this is the usual approach to defining state spaces for stipulated quantum systems. State transitions in can be represented as actions of a discrete observed propagator . This maps each observational outcome to its successor and so can be regarded as defining a computational process, regardless of whether the system S is classical or quantum, provided the finite-resource restriction is respected [19]. 4. System Identification Cannot Be Arbitrarily Refined
In contrast to the operational, observer-dependent conception of “systems” defined above, classical (or “effectively classical”) macroscopic systems such as laboratory apparatus are standardly thought of as both observation- and observer-independent. They are, in particular, standardly viewed both as invariant under decompositions of “the universe” into alternative observer—world pairs—and as well-defined independently of any particular observer or observables (see [
38] for an example of this “realist” position). Let us use the notation
to indicate an observer-independent (“objective” or “ontic”) system, i.e., one that is considered well-defined in the absence of any observers, reserving
S for “observed systems” defined operationally as above in terms of sets of observational outcomes. It is, for example, completely standard in classical physics to describe two observers interacting with or otherwise obtaining information about a single, observer-independent, macroscopic “object”
. This assumption of observer-independence is often carried over into quantum theory. Extensions of the environment as witness formulation of decoherence to models of quantum Darwinism [
32,
33] or quantum-state broadcasting [
39,
40], for example, postulate that multiple observers can independently interact with separable, redundant encodings of the eigenvalues of a single, observer-independent interaction
between an observer-independent quantum system
and its observer-independent environment
. That such an encoding is redundant, i.e., that the multiple “copies” of the information are encoded by the single, objectively well-defined interaction
must be assumed a priori, as it cannot be established by observation [
41]. It is also commonly assumed, for example, in stating the Pusey–Barrett–Rudolph theorem [
42] that multiple “copies” of a single quantum system can be acted upon (e.g., prepared and/or measured) independently by multiple, mutually distant observers. The copies in this case are assumed to objectively have all and only the same degrees of freedom, the same self-Hamiltonian, and the same interaction with their respective environments.
Here we consider whether, and to what extent, observers subject to the finite resource restriction imposed in
Section 2 can identify, and hence either prepare or measure, a postulated “objective” system
. We first consider, in this section, the case of a single observer
O interacting during one time period with a single
. We then consider two cases of practical interest: in
Section 5, that of a single observer interacting with
during multiple time periods and, in
Section 6, that of multiple observers interacting with
during a single time period. We show that violations of Leggett–Garg and Bell inequalities, respectively, can be interpreted as criteria for successful system identification in these two scenarios.
As noted above, the methods developed here apply equally to both classical and quantum systems provided the finite-resource restriction is respected. Let us now assume, as is typical in classical physics and as the simplest case, that
W has an
observer-independent, classical state
, and first consider the finite case in which
W can be described by a
-dimensional, classical, binary state space, e.g., a real Hilbert space. Let us also assume that an observer-independent, classical system
is embedded in
W, that
O obtains information specifically from
while dumping waste heat specifically into an observer-independent environment
defined by
, and that the dimension
. We assume that
O interacts with
via a set of operators
as defined by Equation (
5) above. The outcomes
of this interaction can be associated with unit vectors to construct the apparent state space
of
O’s observed system
S as described above. In this case,
O can, given a sufficient number (i.e.,
) of binary measurement operators, refine the observed
S to the objective
, i.e., the dimension
, at a energetic cost of
where
t is a time coordinate associated with
W, and
is the interval in
t required by
O to identify
S at the given refinement. By dissipating
exclusively into
,
O assures that
remains undisturbed. It is this transfer of waste heat to a large, unobserved, observer-independent environment that enables the typical classical assumption of arbitrary measurement resolution and hence real-valued measurement outcomes.
If the assumption that
O obtains information specifically from
is now dropped and
O is required to
identify by observation as described above,
O must search and therefore interact with, in the limit, all of
W. In this case, refining the observed
S to the objective
requires refining the apparent state space
to the full “ontic” state space of
W. The number of measurement operators required is now
, and the energetic cost is now
where now
. In this limit,
is transferred, on average, to every binary degree of freedom of
W. The environment
can no longer be treated as an unobserved “sink” for waste heat, as in the limit every degree of freedom of
W must be examined to see whether it is a degree of freedom of the as-yet unidentified
. Equation (
11) does not depend in any way on
W being classical but rather is a straightforward consequence of Equation (
5); it is, therefore, completely general. Hence, we have the following.
Theorem 1. An observed system S cannot be refined to an objective system with finite resources.
Proof. Consider the states
and
acted on by measurement operators
and
, respectively, for some
. As
, under increasing refinement, the maximum value of
, and the energy difference between
and
at maximum
k,
. None of the
are, however, orthogonal to
, so in this case
. This violates the predictability sieve condition expressed in Equation (
9), rendering
no longer invariant. Hence,
S is, by definition, unidentifiable in this limit, and the desired refinement of
S to
fails. ☐
Note that Equation (
11) is independent of
: the energy dissipation required for system identification increases with
even if
. As
or becomes continuous, arbitrary refinement of
requires
and again commutativity of the (now infinitely or continuously many)
fails. Theorem 1 thus provides a quantitative extension of Moore’s qualitative result that finite, finite-resolution observations cannot fully determine the state space of an otherwise-uncharacterized system [
11], and shows that it holds even in a finite “world”
W.
System identification cannot, therefore, be arbitrarily refined to the limit of an “objective system” even in classical physics. The predictability sieve expressed in Equation (
8) that allows system identification is only operable provided the measurement interaction
and the apparent state space dimension
. Coarse-graining
W is, therefore, required to identify any embedded system
S, even if
W is classical; if observer-independent “objective systems” exist in
W, identifiable systems only approximate them. An observed
S can, at best, only be associated with a set
of objective systems that could, in some theoretical model specifying some set of reference operators
, generate the observational outcomes
that identify
S. The dimensions of the elements of
are constrained only by
and
as upper and lower bounds, respectively. Hence, Theorem 1 rules out any confirmation by finite observations that two independently observed systems
S and
, whether classical or quantum, are copies of a single objective
.
In practice, observers search for systems only locally, effectively coupling a small, searched region of
W to a large, unobserved reservoir—the rest of
W—into which energy can be dissipated. If this coupling is weak and the dissipation constant
, the predictability sieve condition expressed in Equation (
9) fails as search resolution increases, i.e., as
. Observers typically search even for macroscopic systems at low resolution and then refine the search slightly after plausible candidates have been identified. One may, for example, locate multiple systems of the right size and shape to be one’s laptop and then refine the search by looking for identifying marks, checking the splash screen, etc. Refining the search toward an “objective” limit by examining every transistor, much less every atom, disrupts the commutativity of the
and is therefore infeasible.
5. System Identification at Multiple Times
Let be the observed system identified when O deploys n measurement operators during the interval between and t. Theorem 1 above show that S cannot be refined to some specific objective . However, can be associated with a set of all objective systems for which the would yield, at t, the outcomes obtained. For example, if is identified by the two criteria of being red and having no linear dimension greater than 1 m, then the set contains all objective systems meeting these criteria at t. If O deploys the at multiple times, a sequence , , , etc. is obtained, with corresponding sets of objective systems , , , etc. The sequence , , and identifies a single observed system S if there is a time-invariant set of reference outcome values that fixes a reference state and hence a reference component . However, O cannot determine by observation that or even , as doing so requires determining the self-Hamiltonians of the , i.e., arbitrarily accurate refinement forbidden by Theorem 1. To continue the previous example, O cannot determine that each red thing will remain red or that each small thing will remain small without examining, for each thing, more degrees of freedom than color and size. Hence, even perfect correlation of each of the reference outcome values between all pairs of measurement times cannot gaurantee that O is interacting with the same objective system(s) at t, , , etc. If the probability distributions over pointer outcome values are time-invariant, their time correlations are similarly insufficient to guarantee that O is interacting with the same objective system(s) at all measurement times. Hence, we have the following.
Theorem 2. If for a set of measurements and measurement times and , the two-time outcome correlation functions satisfy the Leggett–Garg inequality, the observed system S identified by the cannot be associated with any single element of the set of objective systems associated with S.
Proof. Mapping each binary outcome from
to
, the Leggett–Garg inequality can be written
for consecutive measurements at
, and
[
16]. The reference outcomes
and hence the reference state
must remain fixed at all observation times to identify
S; hence, the
satisfy this inequality trivially. To see that the fixed
cannot identify any particular element of the set
of objective systems associated with
S, it is enough to note that obtaining
from a measurement on
at
t provides no evidence that
was in state
at
. Hence, if
is to be identified, it must be identified by correlations between the pointer outcomes
. If these satisfy the Leggett–Garg inequality, however, each measurement of the
is independent of all previous as well as all future measurements. Hence, no measurement of the
on
at
t can provide information about the state of
at
. It is, therefore, consistent with both constant
and classically correlated
that outcomes have been obtained from a different element of
at each measurement time. ☐
Theorem 2 restates, in effect, the general principle that classical correlation does not imply joint causation; even perfectly correlated outcome values can have different causal sources. It shows, in the present context, that an observed system S cannot be associated with a particular objective without violating the Leggett–Garg inequality. Violations of this inequality provide, therefore, evidence that a single objective system has been identified over time.
To assure violations of the Leggett–Garg inequality, O must choose pointer measurement operators such that, for , , i.e., the pointer state must “remember” previous applications of . Pointer states with this property are commonplace in classical systems; magnetic hysteresis and work hardening in metals are familiar examples. Direct measurements of such states are not non-disturbing. If the pointer states of a macroscopic apparatus “remember” disturbances caused by previous measurements in this way, the standard corrective is frequent recalibration. Calibrating an apparatus, i.e., using measurement of a designated standard to adjust (i.e., intentionally disturb), the pointer state of the apparatus, effectively erases the memory of the previous measurement-induced disturbance. By providing evidence that the Leggett–Garg inequality has been violated, a need for re-calibration provides evidence of previous use and hence evidence that a single objective system , i.e., the apparatus, has been identified.
System identification over time, therefore, requires a significant asymmetry between reference and pointer degrees of freedom. Measurements of reference degrees of freedom must be non-disturbing in order for the reference state to remain fixed and the observed system S to be identifiable. If S is to be identified with an objective , however, consecutive pointer measurements cannot be non-disturbing. Re-preparing between designated, non-consecutive “informative” measurements, i.e., re-calibration to erase the memory of previous measurements, allows the “informative” measurements to be mutually non-disturbing and hence ideal.
Quantum violations of the Leggett–Garg inequality can, clearly, only be observed if the pointer state component exhibiting the violation is not re-prepared by calibration between measurements. Observing quantum Leggett–Garg violations while maintaining a constant objective
requires at least one pointer state component that both exhibits memory of previous measurements and can be recalibrated between measurements. An apparatus control setting that is re-set, and hence re-prepared, between measurements satisfies this requirement. Here the “standard” to which the state of the control setting is effectively being calibrated is the observer who manipulates the setting. Note that such control settings cannot, while preserving their function of enabling re-preparation and hence re-identification, become entangled with other components of
P that register the observational outcomes of interest. As in the case of
R becoming entangled with
P discussed in
Section 3 above, entanglement between control and outcome-registering components of
P can lead to system-identification failure.
6. Joint System Identification by Multiple Observers
Suppose Alice deploys measurement operators
with outcomes
to identify and obtain pointer-state outcomes from an observed system
and Bob, who is spacelike separated from Alice at each measurement time
t, deploys measurement operators
with outcomes
to identify and obtain pointer-state outcomes from an observed system
. Under what conditions can Alice and Bob conclude, when later comparing their separate sequences of observations, that they were observing two “parts” of the same objective system
? It is useful to consider this question from the perspective of an adversarial game; from this perspective, Alice and Bob determining that they share a single
is equivalent to Alice and Bob determining that they share a communication channel that cannot be, or at least has not been, manipulated by an adversary, Charlie. Suppose
S and
are connected by a classical, timelike communication channel
C, such that
. Under what conditions can Alice and Bob conclude that their observations of
S and
are unaffected by Charlie breaching and manipulating the channel
C? In particular, under what conditions can Alice and Bob conclude that their observational outcomes obtained from
S and
are not the result of Charlie breaching
C and sending instructions to
S and
that determine the observational outcomes? This question has been extensively investigated in the guise of quantum communication security [
43,
44], and the answer is well known. Any pattern of classical correlations between
and
can be undetectably produced by a manipulative Charlie; therefore, no pattern of classical correlations between Alice’s and Bob’s observational outcomes can demonstrate that the channel
C is secure. Hence, we have the following.
Theorem 3. If correlations between sequences and of observational outcomes obtained by spacelike-separated observers A and B are consistent with a deterministic hidden-variable theory, they cannot mutually identify a single jointly observed objective system .
Proof. Any pattern of correlations between the and the that is consistent with a deterministic hidden-variable theory can be implemented by Charlie; hence, any such pattern of correlations is consistent with A and B observing separate systems, both of which are manipulated by Charlie. ☐
As the reference states and remain fixed throughout Alice’s and Bob’s measurements to identify the observed systems S and , respectively, and hence remain perfectly classically correlated, Theorem 3 effectively concerns patterns of correlations between the pointer-state outcomes and the . Such pointer-state correlations only permit identification of a single jointly observed objective system if they are inconsistent with any deterministic hidden-variable theory.
Patterns of pointer-state correlations that are inconsistent with any deterministic hidden-variable theory are well-known in the special case in which Alice and Bob perform a canonical EPR/Bell type experiment. In this case, their sets of pointer measurement operators
and
, respectively, each comprise one “control setting” observable and two mutually noncommuting, two-valued “outcome” observables; the observed correlations between the “outcome” observables are inconsistent with any deterministic hidden-variable theory if and only if they violate at least one Bell/CHSH inequality [
45]. Mermin [
46] explicitly considers deterministic hidden variables as “instruction sets” carried by particles from a central source to spacelike-separated detectors in discussing such experiments. Correlations that violate one or more Bell/CHSH inequalities cannot be replicated by such instruction sets or by a manipulative Charlie, and so provide evidence that Alice and Bob are jointly observing a single objective system
. Such correlations can, in particular, identify an entangled state of
that Alice and Bob share (for recent experimental demonstrations, see [
47,
48,
49]). They cannot, however, by Theorem 1, specify the complete state space of
. Therefore, they cannot identify the one system that Alice and Bob are guaranteed to share under any circumstances, viz. the system comprising everything in the universe except Alice and Bob.
Two features of the use of Bell/CHSH inequalities as an entanglement witness are of particular relevance to system identification. First, at least one of the
and one of the
must measure the state of a pointer observable not manipulable by Charlie. In the canonical EPR-type experimental setup, these observables correspond to the orientation settings for the polarization/spin measurements, which are assumed to be freely chosen by Alice and Bob, respectively, at each
t. This free-choice assumption rules out super-determinism [
50] by preventing Charlie from specifying correlations involving these settings. As seen in
Section 5 above, the existence of at least one pointer observable controlled by the observer enables objective system identification over time. Hence, the free-choice assumption can also be viewed as the assumption that Alice and Bob can each, independently, identify their respective apparatus as objective. Second, Alice and Bob must, after their observations have been completed, exchange a classical message encoding their observational outcomes to compute the correlations observed. This separate, classical communication step (i.e., use of a LOCC (Local Operations, Classical Communication) protocol) is required for shared entanglement to serve as a communication resource [
51]. It introduces a second system, the classical message, that Alice and Bob must share, but without the restriction of spacelike separation. The separate, local observations employed in a LOCC protocol can be regarded as detecting a Bell/CHSH inequality violation only if the joint identification of this later, classical message—in practice, Alice and Bob agreeing that they have securely shared reports of their outcomes—is regarded as unproblematic.
Theorem 3 shows that joint system identification by spacelike-separated observers is demonstrable empirically only within quantum theory; in classical theory it can at best be
assumed. By showing that joint system identification requires use of a LOCC protocol, it suggests that all systems are equivalent to communication channels. This idea is implicit in operational reconstructions of quantum theory [
52,
53] and has been made explicit by Grinbaum [
15].






{kind=link}
{kind=link}
{kind=link}