Maximum Entropy Probability Density Principle in Probabilistic Investigations of Dynamic Systems



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- -
- —response components (space variables in the following): (i) —displacements; (ii) —velocities (j = 1, …, n),
- -
- —Gaussian white noise with constant cross-density in terms of the stochastic moments —number of acting noises
- -
- —mathematical mean value operator in the Gaussian meaning,
- -
- —continuous deterministic functions of state variables and time t; .
- -
- —drift coefficients;
- -
- —diffusion coefficients, .
2. Gibbs Entropy of Probability
- -
- —Boltzmann constant assigning S its physical meaning,
- -
- , see Equation (1)
3. Formulation of the Secondary Constraints
- -
- —matrix of white noise intensities (independent of time).
- -
- —operator of mathematical mean value.
4. One-Component Systems
4.1. Directly Finding the Extreme—Boltzmann’s Solution
4.2. First Order System with Complex Characteristics
- -
- are real coefficients,
- -
- is a Gaussian white noise with intensity K.
- -
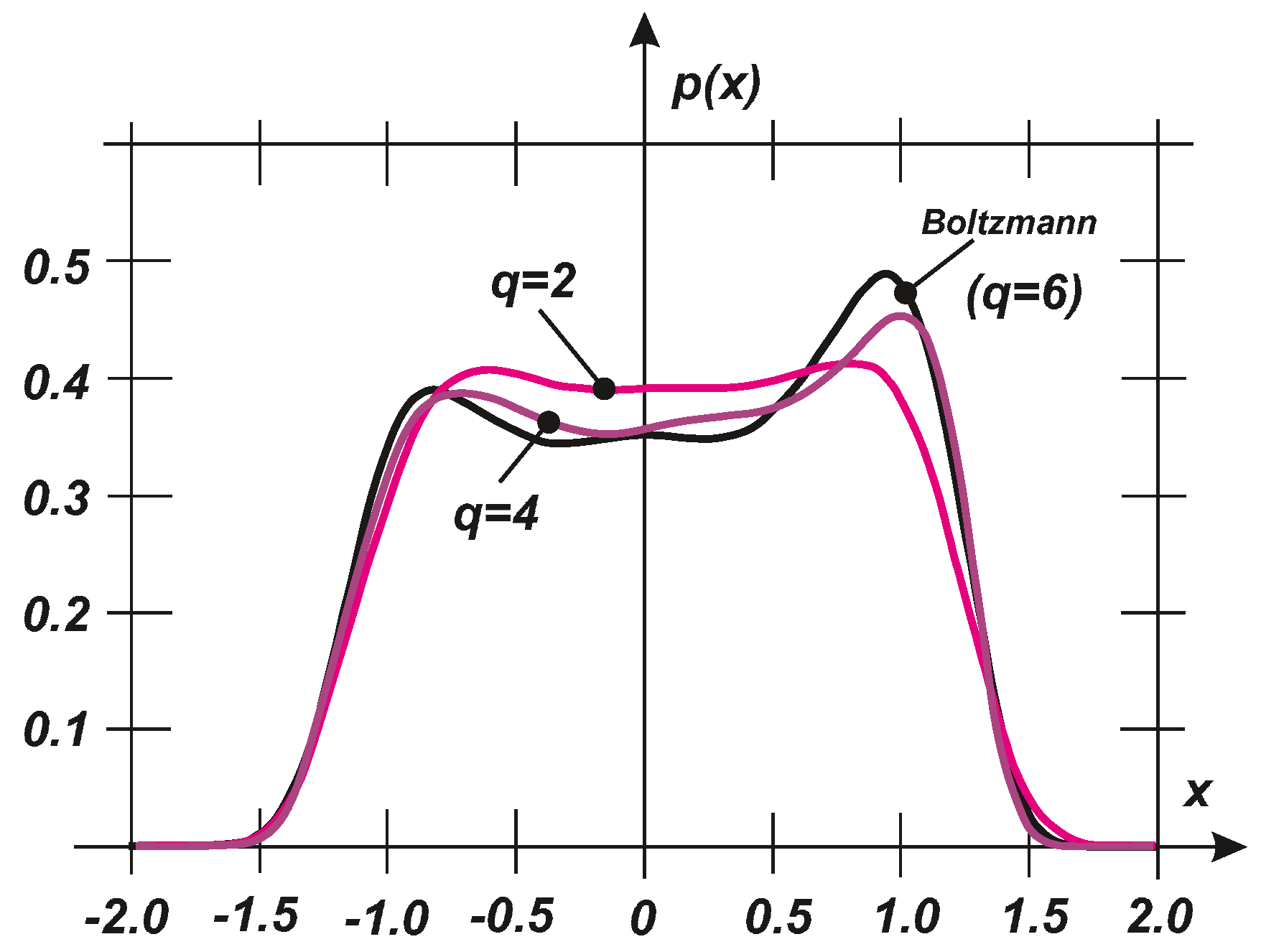
- —the exact PDF,
- -
- —the approximate PDF corresponding to , respectively.
5. Two-Component Systems
5.1. System with Diffusion Additive Excitation
- -
- —variances of for the adjoint linear system,
- -
- r—correlation of these coordinates.
5.2. Dynamic System with a Single Degree of Freedom
- -
- —cross-probability density of ,
- -
- s—intensity of white noise .
- -
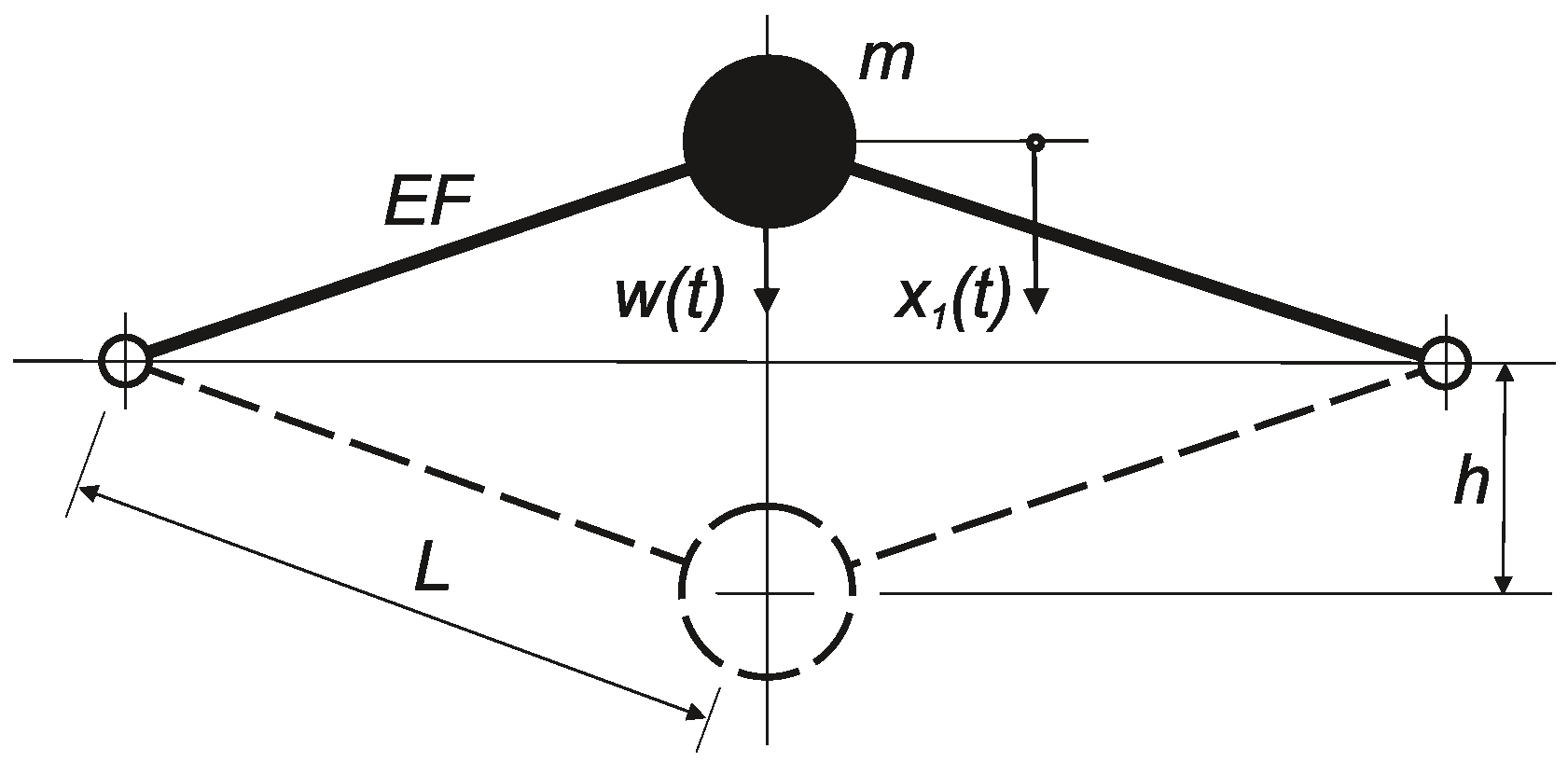
- h—Mieses strutted frame rise,
- -
- —“longitudinal stiffness” of one bar of the strutted frame,
- -
- m—concentrated mass in the movable node of the strutted frame.
6. Dynamic Systems with Many Degrees of Freedom
6.1. General Formulation
- -
- —diagonal square matrix of concentrated masses acting in individual degrees of freedom,
- -
- —diagonal matrix of viscose damping coefficients ,
- -
- —vectors of displacement or velocity, respectively, in individual degrees of freedom,
- -
- —vector of white noise with intensity applied as excitation forces
- -
- —rectangular matrix transforming white noise into relevant degrees of freedom,
- -
- —potential energy (scalar function of displacements ) of the system.
6.2. Stochastically Proportional Systems
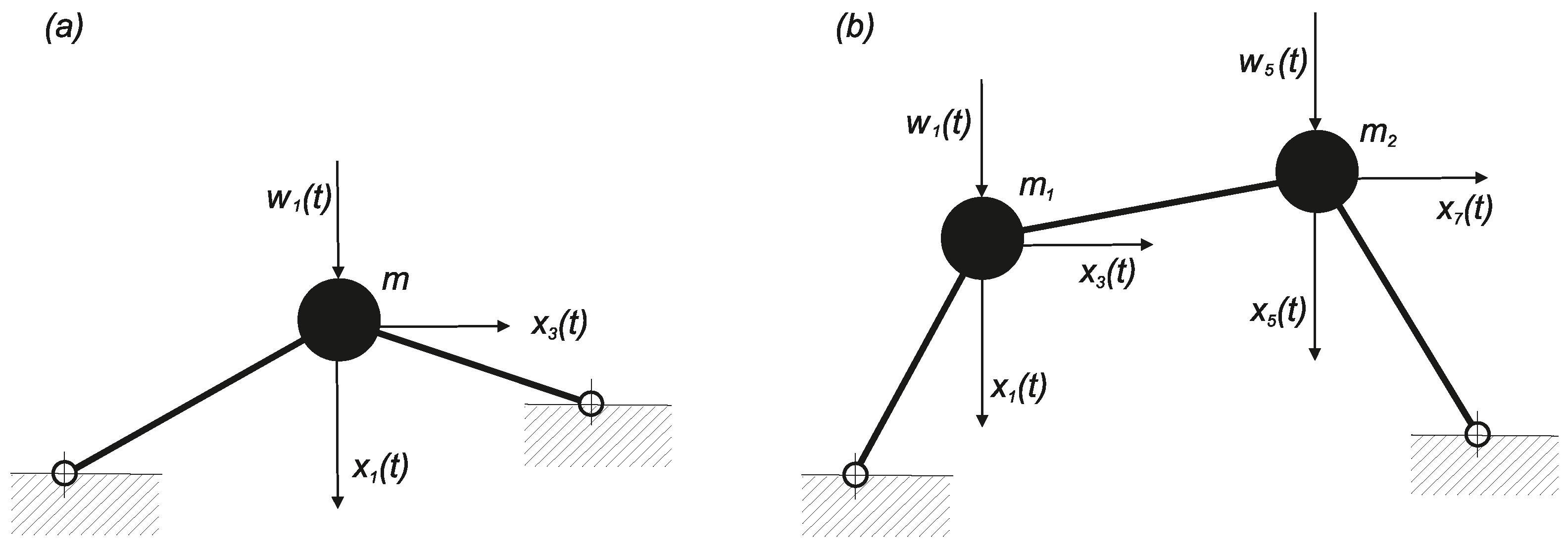
- The Mieses strutted frame with one mass and two degrees of freedom, as shown in Figure 9a, while only considering the SDOF system (vertical displacement) described in Section 5.2. At the level of , the algebraic system contained 70 unknown parameters and most of them equaled zero. Compared with Equation (55), the results did not differ qualitatively where the stochastic coherence velocity/displacement was still negligible, although the excitation acted only on one degree of freedom.
- A non-symmetrical strutted frame with two masses and four degrees of freedom, as shown in Figure 9b, at the level of . Again, the velocity and displacement interaction was negligibly small (it was impossible to determine based simply on the approximate character of the overall solution process). The stochastic relationship of the individual displacements varied considerably in terms of the dependence on the excitation intensity. This relationship was small when the excitation was generally small and local snap-through did not occur with high probability. However, it increased steeply locally or globally immediately after overcoming some energy barrier that kept the motion within local limits. The signs of the coefficients for the fourth powers of the polynomial in the exponent of the function were positive. Therefore, the boundary conditions in Equation (11) were satisfied without difficulty.
6.3. Transformation of the System with Respect to Nonlinear Normal Modes
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| FEM | Finite Element Method |
| FPE | Fokker–Planck Equation |
| MDOF | Multi-Degree of Freedom |
| SDOF | Single Degree of Freedom |
| Probability Density Function | |
| NNM | Nonlinear Normal Mode |
| SPS | Stochastically Proportional System |
| AS | Alternate System |
References
- Askar, A.; Cakmak, A. Seismic waves in random media. Probab. Eng. Mech. 1988, 3, 124–129. [Google Scholar] [CrossRef]
- Langley, R. Wave transmission through one-dimensional near periodic structures: Optimum and random disorder. J. Sound Vib. 1995, 188, 717–743. [Google Scholar] [CrossRef]
- Manolis, G. Acoustic and seismic wave propagation in random media. In Computational Stochastic Mechanics; Cheng, A.D., Yang, C.Y., Eds.; Elsevier: Southampton, UK, 1993; Chapter 26; pp. 597–622. [Google Scholar]
- Náprstek, J. Wave propagation in semi-infinite bar with random imperfections of density and elasticity module. J. Sound Vib. 2008, 310, 676–693. [Google Scholar] [CrossRef]
- Náprstek, J.; Fischer, C. Planar compress wave scattering and energy diminution due to random inhomogeneity of material density. In Proceedings of the 16th World Conference on Earthquake Engineering, Santiago, Chile, 9–13 January 2017. [Google Scholar]
- Náprstek, J. Sound wave scattering at randomly rough surfaces in Fraunhofer domain. In Proceedings of the Engineering Mechanics 2000 ASCE, Austin, TX, USA, 21–24 May 2000; paper N-8. Tassoulas, J., Ed.; University of Texas: Austin, TX, USA, 2000. 8p. [Google Scholar]
- Zembaty, Z.; Castellani, A.; Boffi, G. Spectral analysis of the rotational component of eartquake motion. Probab. Eng. Mech. 1993, 8, 5–14. [Google Scholar] [CrossRef]
- Zembaty, Z. Vibrations of bridge structure under kinematic wave excitations. J. Struct. Eng. 1997, 123, 479–488. [Google Scholar] [CrossRef]
- Kanai, K. Seismic-Empirical Formula for the Seismic Characteristics of the Ground; Bulletin of the Earthquake Research Institute: Tokyo, Japan, 1957; Volume 35, pp. 309–325. [Google Scholar]
- Tajimi, H. A statistical method of determining the maximum response of a building structure during an earthquake. In Proceedings of the 2nd World Conference on Earthquake Engineering, Tokyo, Japan, 11–18 July 1960; Science Council of Japan: Tokyo-Kyoto, Japan, 1960; pp. 781–798. [Google Scholar]
- Lin, Y.; Cai, G. Probabilistic Structural Dynamics; McGraw-Hill: New York, NY, USA, 1995. [Google Scholar]
- Bolotin, V. Random Vibrations of Elastic Systems (in Russian); Nauka: Moskva, Russia, 1979. [Google Scholar]
- de Boor, C. Practical Guide to Splines; Springer: New York, NY, USA, 1987. [Google Scholar]
- Malat, S. Multiresolution approximation and wavelets. Trans. Am. Math. Soc. 1989, 315, 59–88. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. A 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Zembaty, Z.; Krenk, S. Response spectra of spatial ground motion. In Proceedings of the 10th European Conference on Earthquake Engineering, Vienna, Austria, 28 August–2 September 1994; Flesch, R., Ed.; Balkema: Rotterdam, The Netherlands, 1994; pp. 1271–1275. [Google Scholar]
- Fischer, C. Decomposition of the seismic excitation. In Proceedings of the EURODYN’99 Conference, Prague, Czech Republic, 7–10 June 1999; Frýba, L., Náprstek, J., Eds.; Balkema: Rotterdam, The Netherlands, 1999; pp. 1111–1116. [Google Scholar]
- Náprstek, J.; Fischer, O. Comparison of classical and stochastic solution to seismic response of structures. In Proceedings of the 11th European Conference on Earthquake Engineering, Paris, France, 6–11 September 1998; CD ROM. Bisch, P., Ed.; Balkema: Rotterdam, The Netherlands, 1998; p. 13. [Google Scholar]
- Náprstek, J. Non-stationary response of structures excited by random seismic processes with time variable frequency content. Soil Dyn. Earthq. Eng. 2002, 22, 1143–1150. [Google Scholar] [CrossRef]
- European Committee for Standardization (Ed.) Eurocode 8. Design Provisions for Earthquake Resistance of Structures; CEN: Brussels, Belgium, 1996. [Google Scholar]
- Tondl, A.; Ruijgrok, T.; Verhulst, F.; Nabergoj, R. Autoparametric Resonance in Mechanical Systems; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Náprstek, J. Non-linear auto-parametric vibrations in civil engineering systems. In Trends in Civil and Structural Engineering Computing; Topping, B., Neves, L.C., Barros, R., Eds.; Saxe-Coburg Publications: Stirlingshire, UK, 2009; Chapter 14; pp. 293–317. [Google Scholar]
- Pugachev, V.; Sinitsyn, I. Stochastic Differential Systems—Analysis and Filtering; J. Willey: Chichester, UK, 1987. [Google Scholar]
- Arnold, L. Random Dynamical Systems; Springer: Berlin/Heidelberg, Germany, 1998. [Google Scholar]
- Gichman, I.; Skorochod, A. Stochasticheskije Differencialnyje Uravnenija (in Russian); Naukova dumka: Kiev, Ukraine, 1968. [Google Scholar]
- Grasman, J.; Van Herwaarden, O. Asymptotic Methods for the Fokker–Planck Equation and the exit Problem in Applications; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Náprstek, J. Some properties and applications of eigen functions of the Fokker–Planck operator. In Proceedings of the Engineering Mechanics 2005, Svratka, Czech Republic, 9–12 May 2005; Fuis, V., Krejčí, P., Návrat, T., Eds.; FME TU: Brno, Czech Republic, 2005; p. 12. [Google Scholar]
- Weinstein, E.; Benaroya, H. The van Kampen expansion for the Fokker–Planck equation of a Duffing oscillator. J. Stat. Phys. 1994, 77, 667–679. [Google Scholar] [CrossRef]
- Spencer, B.; Bergman, L. On the numerical solution of the Fokker–Planck equation for nonlinear stochastic systems. Nonlinear Dyn. 1993, 4, 357–372. [Google Scholar] [CrossRef]
- Masud, A.; Bergman, L. Application of multi-scale finite element methods to the solution of the Fokker–Planck equation. Comput. Methods Appl. Mech. Eng. 2005, 194, 1513–1526. [Google Scholar] [CrossRef]
- Náprstek, J.; Král, R. Finite element method analysis of Fokker–Planck equation in stationary and evolutionary versions. Adv. Eng. Softw. 2014, 72, 28–38. [Google Scholar] [CrossRef]
- Náprstek, J.; Král, R. Theoretical background and implementation of the finite element method for multi-dimensional Fokker–Planck equation analysis. Adv. Eng. Softw. 2017, 113, 54–75. [Google Scholar]
- Jaynes, E. Information theory and statistical mechanics. Phys. Rev. 1957, 106, 620–630. [Google Scholar] [CrossRef]
- Kullback, S. Information Theory and Statistics; Chapman and Hall: New York, NY, USA, 1959. [Google Scholar]
- Sarlis, N.V.; Skordas, E.S.; Varotsos, P.A.; Nagao, T.; Kamogawa, M.; Tanaka, H.; Uyeda, S. Minimum of the order parameter fluctuations of seismicity before major earthquakes in Japan. Proc. Natl. Acad. Sci. USA 2013, 110, 13734–13738. [Google Scholar] [CrossRef] [PubMed]
- Varotsos, P.A.; Sarlis, N.V.; Skordas, E.S.; Tanaka, H. A plausible explanation of the b-value in the Gutenberg–Richter law from first Principles. Proc. Jpn. Acad. B 2004, 80, 429–434. [Google Scholar] [CrossRef]
- Burg, J. New concepts in power spectra estimation. Presented at the 40th Annual International SEG Meeting, New Orleans, LA, USA, 10 November 1970. [Google Scholar]
- Stocks, N. Information transmission in parallel threshold arrays: Suprathreshold stochastic resonance. Phys. Rev. E 2001, 63, 041114. [Google Scholar] [CrossRef] [PubMed]
- McDonnell, M.; Stock, N.; Pearce, C.; Abbott, D. Stochastic Resonance: From Suprathreshold Stochastic Resonance to Stochastic Signal Quantization; Cambridge University Press: Cambridge, NY, USA, 2008. [Google Scholar]
- Cieslikiewicz, W. Determination of the Probability Distribution of a Sea Surface Elevation via Maximum Entropy Method (in Polish); Rep. Institute of Hydro-Engineering, Polish Acad. Sci.: Gdansk, Poland, 1988. [Google Scholar]
- Sargent, M., III; Scully, M.; Lamb, W., Jr. Laser Physics; Addison-Wesley: Reading, UK, 1974. [Google Scholar]
- Dong, W.; Bao, A.; Shah, H. Use of maximum entropy principle in earthquake recurrence relationship. Bull. Seismol. Soc. Am. 1984, 74, 725–737. [Google Scholar]
- Herzel, H.; Ebeling, W.; Schmitt, A. Entropies of biosequencies: The role of repeats. Phys. Rev. E 1994, 6, 5061. [Google Scholar] [CrossRef]
- Rosenblueth, E.; Karmeshu; Hong, H.P. Maximum entropy and discretization of probability distributions. Probab. Eng. Mech. 1987, 2, 58–63. [Google Scholar] [CrossRef]
- Tagliani, A. Principle of Maximum Entropy and probability distributions: definition of applicability field. Probab. Eng. Mech. 1989, 4, 99–104. [Google Scholar] [CrossRef]
- Sobczyk, K.; Trebicki, J. Maximum entropy principle in stochastic dynamics. Probab. Eng. Mech. 1990, 5, 102–110. [Google Scholar] [CrossRef]
- Sobczyk, K.; Trebicki, J. Maximum entropy principle and nonlinear stochastic oscillators. Phys. A Stat. Mech. Its Appl. 1993, 193, 448–468. [Google Scholar] [CrossRef]
- Náprstek, J. Principle of maximum entropy of probability density in stochastic mechanics of elastic systems. In Proceedings of the Dynamics of Machines ’95, Prague, Czech Republic, 1–2 February 1995; Dobiáš, I., Ed.; IT ASCR: Prague, Czech Republic, 1995; pp. 115–122. [Google Scholar]
- Náprstek, J. Application of the maximum entropy principle to the analysis of non-stationary response of SDOF/MDOF systems. In Proceedings of the 2nd European Non-Linear Oscillations Conference—EUROMECH, Prague, Czech Republic, 9–13 September 1996; Půst, L., Peterka, F., Eds.; IT ASCR: Prague, Czech Republic, 1996; pp. 305–308. [Google Scholar]
- Gibbs, J. Elementary Principles in Statistical Mechanics; Dover Publications: New York, NY, USA, 1960. [Google Scholar]
- Reif, F. Statistical Physics—Berkeley Physics Course-Vol.5; Mc Graw Hill: New York, NY, USA, 1965. [Google Scholar]
- Michlin, S. Variational Methods in Mathematical Physics (in Russian); Nauka: Moskva, Russia, 1970. [Google Scholar]
- Náprstek, J.; Fischer, C. Semi-analytical stochastic analysis of the generalized van der Pol system. App. Comput. Mech. 2018, 12, 45–58. [Google Scholar] [CrossRef][Green Version]
- Zubarev, D. Neravnovesnaja Statističeskaja Termodinamika (in Russian); Nauka: Moskva, Russia, 1971. [Google Scholar]
- Kullback, S.; Leibler, R. On information and sufficiency. Ann. Math. Stat. 1951, 22, 79–86. [Google Scholar] [CrossRef]
- Kloeden, P.; Platen, E. Numerical Solution of Stochastic Differential Equations; Springer: Berlin/Heidelberg, Germany, 1992. [Google Scholar]
- Rosenberg, R. Normal modes of non-linear dual-mode systems. J. Appl. Mech. 1960, 27, 263–268. [Google Scholar] [CrossRef]
- Vakakis, A.; Manevitch, L.; Mikhlin, Y.; Pilipchuk, V.; Zevin, A. Normal Modes and Localization in Non-Linear Systems; Wiley: New York, NY, USA, 1996. [Google Scholar]
- Kerschen, G.; Peeters, M.; Golinval, J.; Vakakis, A. Non-linear normal modes, Part I: A useful framework for the structural dynamicist. Mech. Syst. Signal Process. 2009, 23, 170–194. [Google Scholar] [CrossRef]









© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Náprstek, J.; Fischer, C. Maximum Entropy Probability Density Principle in Probabilistic Investigations of Dynamic Systems. Entropy 2018, 20, 790. https://doi.org/10.3390/e20100790
Náprstek J, Fischer C. Maximum Entropy Probability Density Principle in Probabilistic Investigations of Dynamic Systems. Entropy. 2018; 20(10):790. https://doi.org/10.3390/e20100790
Chicago/Turabian StyleNáprstek, Jiří, and Cyril Fischer. 2018. "Maximum Entropy Probability Density Principle in Probabilistic Investigations of Dynamic Systems" Entropy 20, no. 10: 790. https://doi.org/10.3390/e20100790
APA StyleNáprstek, J., & Fischer, C. (2018). Maximum Entropy Probability Density Principle in Probabilistic Investigations of Dynamic Systems. Entropy, 20(10), 790. https://doi.org/10.3390/e20100790