
A Cost/Speed/Reliability Tradeoff to Erasing †

Abstract
:1. Introduction
2. The Erasing Problem
Kullback–Leibler Cost
3. Solution to the Erasing Problem
4. Interpreting the KL Cost
4.1. Path Space Szilard–Landauer Correspondence
4.2. Thermodynamic Interpretation
4.2.1. Thermodynamics on a Two-State Markov Chain
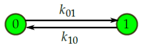
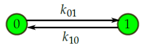
- Consider again the two-state continuous-time Markov chain with passive dynamics given by transition rates and .
![]() Let and denote the internal energy of states “0” and “1”, respectively. Then, the equilibrium distribution is given by and . We also have from detailed balance. Together this yields
Let and denote the internal energy of states “0” and “1”, respectively. Then, the equilibrium distribution is given by and . We also have from detailed balance. Together this yields - Now consider the same two-state system with a control applied to it by means of a field of potential so that the potential energy in state i becomes . The transition rates due to the control become and . By a reasoning similar to how we derived Equation (9), we getCombining with Equation (9), this yields
- Given a distribution on the states, we can define the following thermodynamic quantities:
- Expected internal energy .
- Entropy .
- Nonequilibrium free energy .
- Given a transition from state i to state j in the presence of the control field, we can define the following thermodynamic quantities:
- Heat dissipated .
- Entropy increase of the system .
- Suppose the system is described at time t by a distribution . Define the Current so that .
- We can further compute
- Define Total Entropy Production to be the total entropy produced from time 0 to time t. In other words, andAfter simplification,which is a statement of the second law of thermodynamics.
- The following identity is immediateand is another form of the first law.
{kind=link}
4.2.2. Thermodynamic Cost for Rapid Erasing of a Reliable Bit
4.2.3. Link between KL-Cost and Thermodynamic Work
4.3. Large Deviations Interpretation
4.4. Gibbs Measure
5. Conclusions
Acknowledgments
Conflicts of Interest
References
- Szilard, L. Über die Entropieverminderung in einem thermodynamischen System bei Eingriffen intelligenter Wesen. Z. Phys. 1929, 53, 840–856. (In German) [Google Scholar] [CrossRef]
- Landauer, R. Irreversibility and heat generation in the computing process. IBM J. Res. Dev. 1961, 5, 183–191. [Google Scholar] [CrossRef]
- Esposito, M.; van den Broeck, C. Second law and Landauer principle far from equilibrium. Europhys. Lett. 2011, 95, 40004. [Google Scholar] [CrossRef]
- Gopalkrishnan, M. The Hot Bit I: The Szilard–Landauer correspondence. 2013; arXiv:1311.3533. [Google Scholar]
- Reeb, D.; Wolf, M.M. An improved Landauer principle with finite-size corrections. New J. Phys. 2014, 16, 103011. [Google Scholar] [CrossRef]
- Laughlin, S.B.; de Ruyter van Steveninck, R.R.; Anderson, J.C. The metabolic cost of neural information. Nat. Neurosci. 1998, 1, 36–41. [Google Scholar] [CrossRef] [PubMed]
- Mudge, T. Power: A first-class architectural design constraint. Computer 2001, 34, 52–58. [Google Scholar] [CrossRef]
- Von Neumann, J. Theory of Self-Reproducing Automata; University of Illinois Press: Urbana, IL, USA, 1966; p. 66. [Google Scholar]
- Bennett, C.H. The thermodynamics of computation—A review. Int. J. Theor. Phys. 1982, 21, 905–940. [Google Scholar] [CrossRef]
- Aurell, E.; Gawȩdzki, K.; Mejía-Monasterio, C.; Mohayaee, R.; Muratore-Ginanneschi, P. Refined second law of thermodynamics for fast random processes. J. Stat. Phys. 2012, 147, 487–505. [Google Scholar] [CrossRef]
- Diana, G.; Bagci, G.B.; Esposito, M. Finite-time erasing of information stored in fermionic bits. Phys. Rev. E 2013, 87, 012111. [Google Scholar] [CrossRef] [PubMed]
- Zulkowski, P.R.; DeWeese, M.R. Optimal finite-time erasure of a classical bit. Phys. Rev. E 2014, 89, 052140. [Google Scholar] [CrossRef] [PubMed]
- Salamon, P.; Nitzan, A. Finite time optimizations of a Newton’s law Carnot cycle. J. Chem. Phys. 1981, 74, 441482. [Google Scholar] [CrossRef]
- Swanson, J.A. Physical versus logical coupling in memory systems. IBM J. Res. Dev. 1960, 4, 305–310. [Google Scholar] [CrossRef]
- Alicki, R. Information is not physical. 2014; arXiv:1402.2414. [Google Scholar]
- Todorov, E. Efficient computation of optimal actions. Proc. Natl. Acad. Sci. USA 2009, 106, 11478–11483. [Google Scholar] [CrossRef] [PubMed]
- Fleming, W.H.; Mitter, S.K. Optimal control and nonlinear filtering for nondegenerate diffusion processes. Stochastics 1982, 8, 63–77. [Google Scholar] [CrossRef]
- Kappen, H.J. Path integrals and symmetry breaking for optimal control theory. J. Stat. Mech. 2005, 2005, P11011. [Google Scholar] [CrossRef]
- Kappen, H.J. Linear theory for control of nonlinear stochastic systems. Phys. Rev. Lett. 2005, 95, 200201. [Google Scholar] [CrossRef] [PubMed]
- Theodorou, E.A. Iterative Path Integral Stochastic Optimal Control: Theory and Applications to Motor Control. Ph.D. Thesis, University of Southern California, Los Angeles, CA, USA, 2011. [Google Scholar]
- Theodorou, E.; Todorov, E. Relative entropy and free energy dualities: Connections to path integral and KL control. In Proceedings of the 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 1466–1473.
- Stulp, F.; Theodorou, E.A.; Schaal, S. Reinforcement learning with sequences of motion primitives for robust manipulation. IEEE Trans. Robot. 2012, 28, 1360–1370. [Google Scholar] [CrossRef]
- Dvijotham, K.; Todorov, E. A unified theory of linearly solvable optimal control. In Proceedings of the 27th Conference on Uncertainty in Artificial Intelligence (UAI 2011), Barcelona, Spain, 14–17 July 2011.
- Kappen, H.J.; Gómez, V.; Opper, M. Optimal control as a graphical model inference problem. Mach. Learn. 2012, 87, 159–182. [Google Scholar] [CrossRef]
- Van den Broek, B.; Wiegerinck, W.; Kappen, B. Graphical model inference in optimal control of stochastic multi-agent systems. J. Artif. Intell. Res. 2008, 32, 95–122. [Google Scholar]
- Wiegerinck, W.; van den Broek, B.; Kappen, H. Stochastic optimal control in continuous space-time multi-agent systems. 2012; arXiv:1206.6866. [Google Scholar]
- Horowitz, M.B. Efficient Methods for Stochastic Optimal Control. Ph.D. Thesis, California Institute of Technology, Pasadena, CA, USA, 2014. [Google Scholar]
- Dupuis, P.; Ellis, R.S. A Weak Convergence Approach to the Theory of Large Deviations; Wiley: New York, NY, USA, 2011. [Google Scholar]
- Jaynes, E.T. Information theory and statistical mechanics. Phys. Rev. 1957, 106, 620–630. [Google Scholar] [CrossRef]
- Propp, M.B. The Thermodynamic Properties of Markov Processes. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1985. [Google Scholar]
- Sekimoto, K. Kinetic characterization of heat bath and the energetics of thermal ratchet models. J. Phys Soc. Jpn. 1997, 66, 1234–1237. [Google Scholar] [CrossRef]
- Seifert, U. Stochastic thermodynamics, fluctuation theorems and molecular machines. Rep. Prog. Phys. 2012, 75, 126001. [Google Scholar] [CrossRef] [PubMed]
- Browne, C.; Garner, A.J.P.; Dahlsten, O.C.O.; Vedral, V. Guaranteed energy-efficient bit reset in finite time. Phys. Rev. Lett. 2014, 113, 100603. [Google Scholar] [CrossRef] [PubMed]
- Schrödinger, E. Uber die umkehrung der naturgesetze, sitzung ber preuss. Akad. Wiss. Berlin Phys. Math. 1931, 2, 144–153. (In German) [Google Scholar]
- Beurling, A. An automorphism of product measures. Ann. Math. 1960, 72, 189–200. [Google Scholar] [CrossRef]
- Föllmer, H. Random fields and diffusion processes. In École d’Été de Probabilités de Saint-Flour XV–XVII, 1985–87; Springer: Berlin/Heidelberg, Germany, 1988; pp. 101–203. [Google Scholar]
- Aebi, R. Schrödinger Diffusion Processes; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar]
- Wissner-Gross, A.D.; Freer, C.E. Causal entropic forces. Phys. Rev. Lett. 2013, 110, 168702. [Google Scholar] [CrossRef] [PubMed]
- Zwanzig, R. Nonequilibrium Statistical Mechanics; Oxford University Press: New York, NY, USA, 2001. [Google Scholar]
© 2016 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gopalkrishnan, M. A Cost/Speed/Reliability Tradeoff to Erasing. Entropy 2016, 18, 165. https://doi.org/10.3390/e18050165
Gopalkrishnan M. A Cost/Speed/Reliability Tradeoff to Erasing. Entropy. 2016; 18(5):165. https://doi.org/10.3390/e18050165
Chicago/Turabian StyleGopalkrishnan, Manoj. 2016. "A Cost/Speed/Reliability Tradeoff to Erasing" Entropy 18, no. 5: 165. https://doi.org/10.3390/e18050165
APA StyleGopalkrishnan, M. (2016). A Cost/Speed/Reliability Tradeoff to Erasing. Entropy, 18(5), 165. https://doi.org/10.3390/e18050165