Adaptive Leader-Following Consensus of Multi-Agent Systems with Unknown Nonlinear Dynamics

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Preliminaries
2.1. Graph Theory
 , ) be an undirected graph with a set of nodes
= {v1, …, vN} and a set of edges ⊆
×
. The node indices belong to a finite index set = {1, …, N}. An edge of is denoted by an unordered pair (vi, vj), which means that node vi and vj can exchange information with each other. Let us define a weighted adjacency matrix
, ) be an undirected graph with a set of nodes
= {v1, …, vN} and a set of edges ⊆
×
. The node indices belong to a finite index set = {1, …, N}. An edge of is denoted by an unordered pair (vi, vj), which means that node vi and vj can exchange information with each other. Let us define a weighted adjacency matrix
 = [αij ] ∈ ℝN×N as follows: αij = αji > 0 if (vi, vj) ∈ , otherwise αij = αji = 0. Moreover, we assume that αii = 0 for all i ∈ . The set of neighbors of node i is denoted by Ni = {j ∈ : (vi, vj) ∈ }. Define the degree matrix as D = diag{d1, …, dN} with di = ∑j∈Ni αij. The symmetric Laplacian matrix corresponding to the undirected graph ℊ is defined as L = D −
. A path is a sequence of unordered edges of the form (vi1, vi2), (vi2, vi3), …, where vij ∈
. The graph ℊ is called connected if there is a path between any two nodes.
= [αij ] ∈ ℝN×N as follows: αij = αji > 0 if (vi, vj) ∈ , otherwise αij = αji = 0. Moreover, we assume that αii = 0 for all i ∈ . The set of neighbors of node i is denoted by Ni = {j ∈ : (vi, vj) ∈ }. Define the degree matrix as D = diag{d1, …, dN} with di = ∑j∈Ni αij. The symmetric Laplacian matrix corresponding to the undirected graph ℊ is defined as L = D −
. A path is a sequence of unordered edges of the form (vi1, vi2), (vi2, vi3), …, where vij ∈
. The graph ℊ is called connected if there is a path between any two nodes.2.2. Problem Formulation
Assumption 1
Assumption 2
 = (
= (
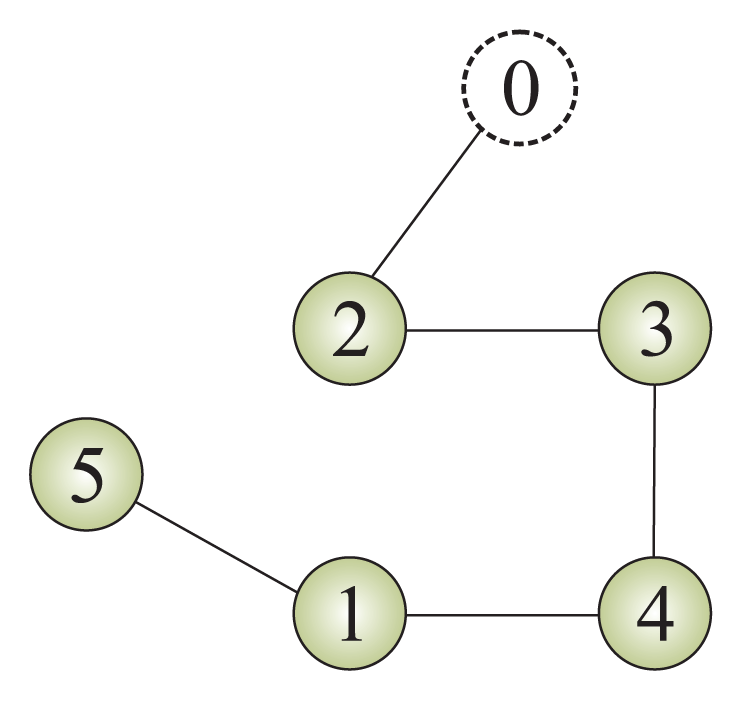
 , ̄) to model the interaction topology between N followers and the leader (labeled as v0), where
= {v0, v1, …, vN} and ̄ ⊆
×
. To depict whether the followers are connected to the leader in
, we define a leader adjacency matrix
, ̄) to model the interaction topology between N followers and the leader (labeled as v0), where
= {v0, v1, …, vN} and ̄ ⊆
×
. To depict whether the followers are connected to the leader in
, we define a leader adjacency matrix
 = diag{α10, …, αN0} ∈ ℝN×N, where αi0 > 0 if follower vi is connected to the leader across the communication link (vi, v0), otherwise, αi0 = 0. If we define a new matrix H = L+
, the following lemma plays a key role in the sequel.
= diag{α10, …, αN0} ∈ ℝN×N, where αi0 > 0 if follower vi is connected to the leader across the communication link (vi, v0), otherwise, αi0 = 0. If we define a new matrix H = L+
, the following lemma plays a key role in the sequel.Lemma 1
is connected, then the symmetric matrix H associated with is positive definite.3. Consensus Analysis
3.1. Distributed Adaptive Controller Design
3.2. Stability Analysis
Remark 1
Remark 2
Theorem 1
is connected and φk (k = 0, 1, …, N) are uniformly bounded. Then, the distributed control law (5)–(6) combined with the adaptive law (13) solves the leader-following consensus problem if the coupling strength c is chosen as:Proof
is connected, we know that H is positive definite from Lemma 1. Then, there exists a unitary matrix U ∈ ℝN×N, such that:Remark 3
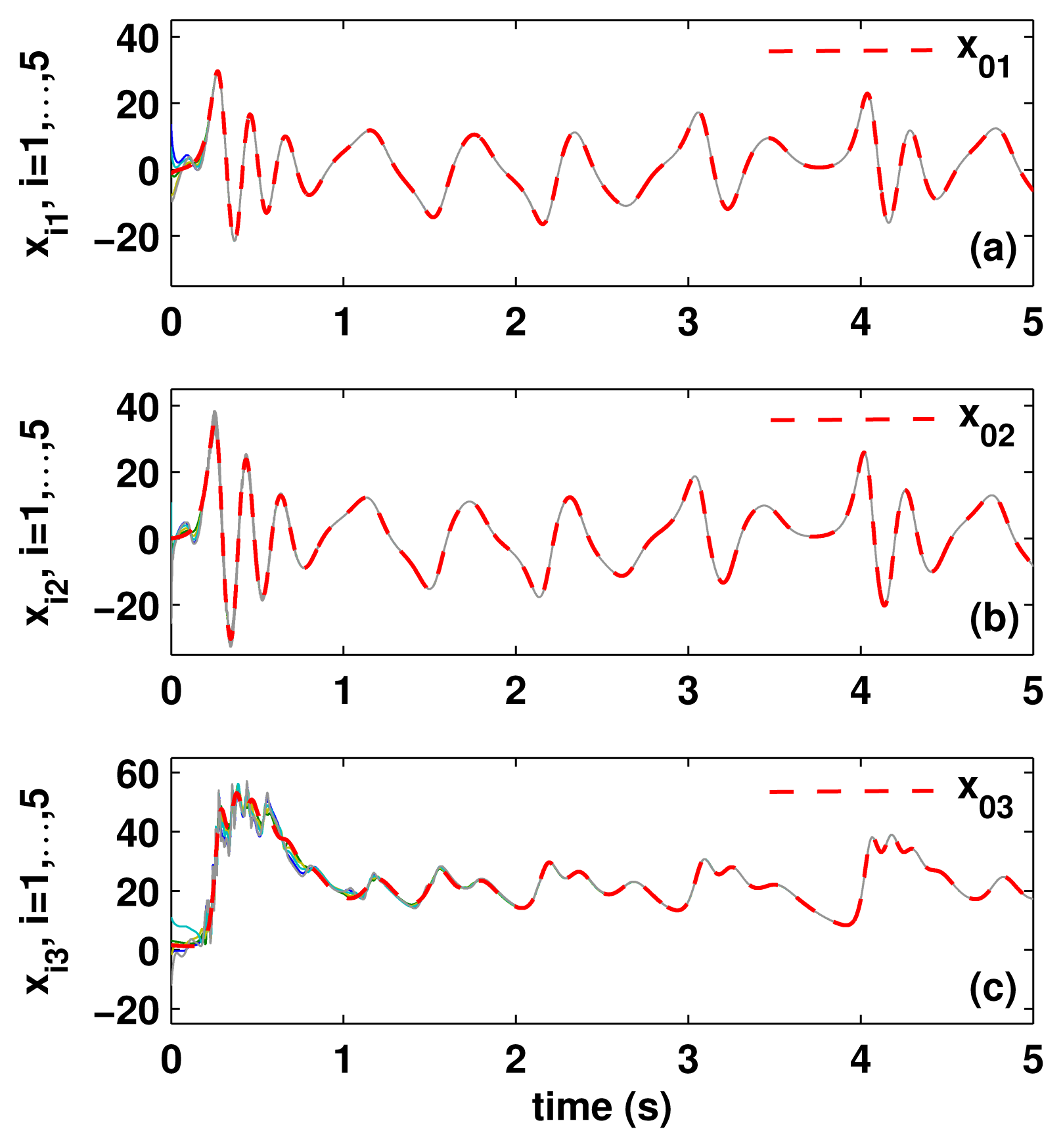
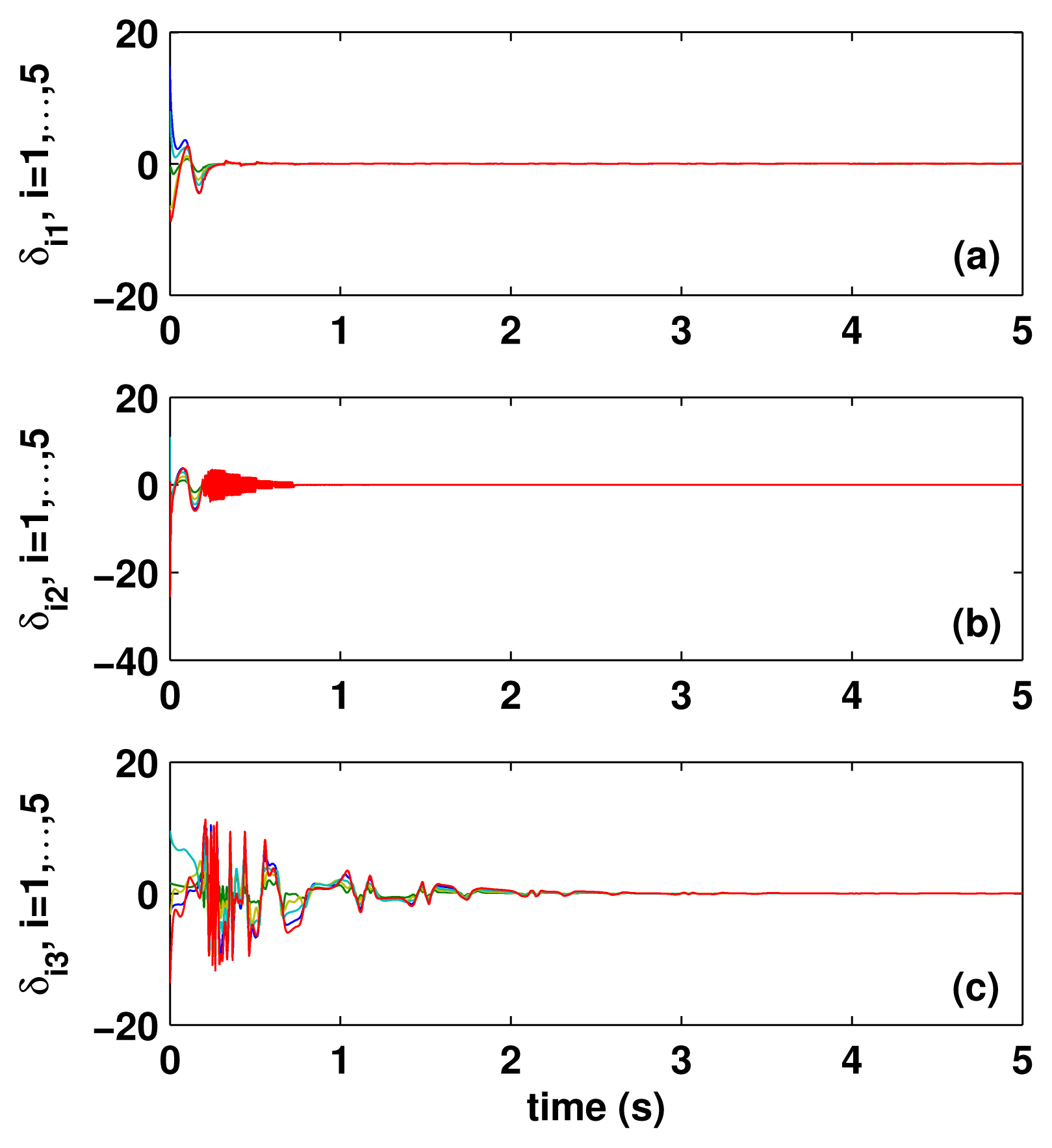
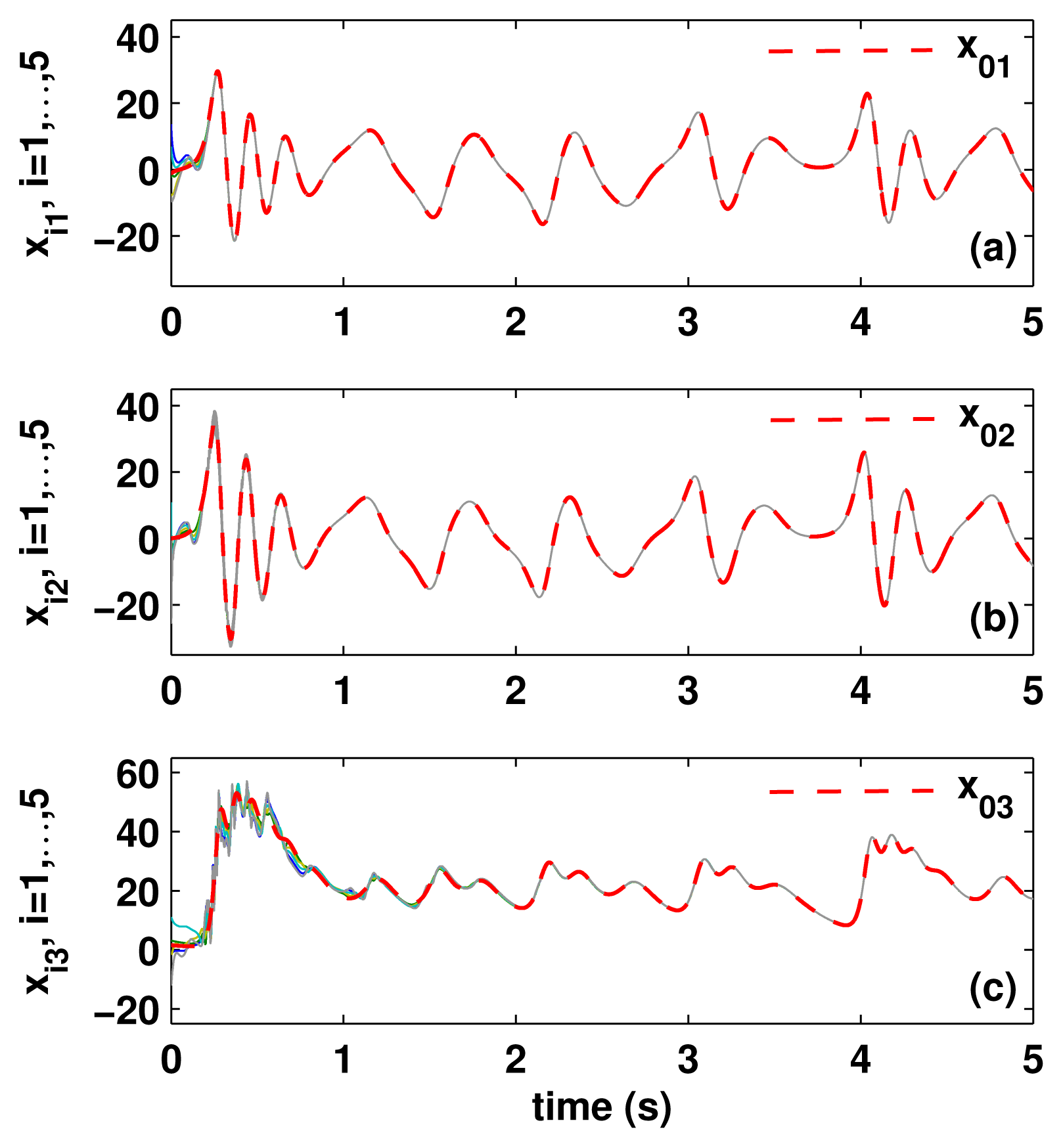
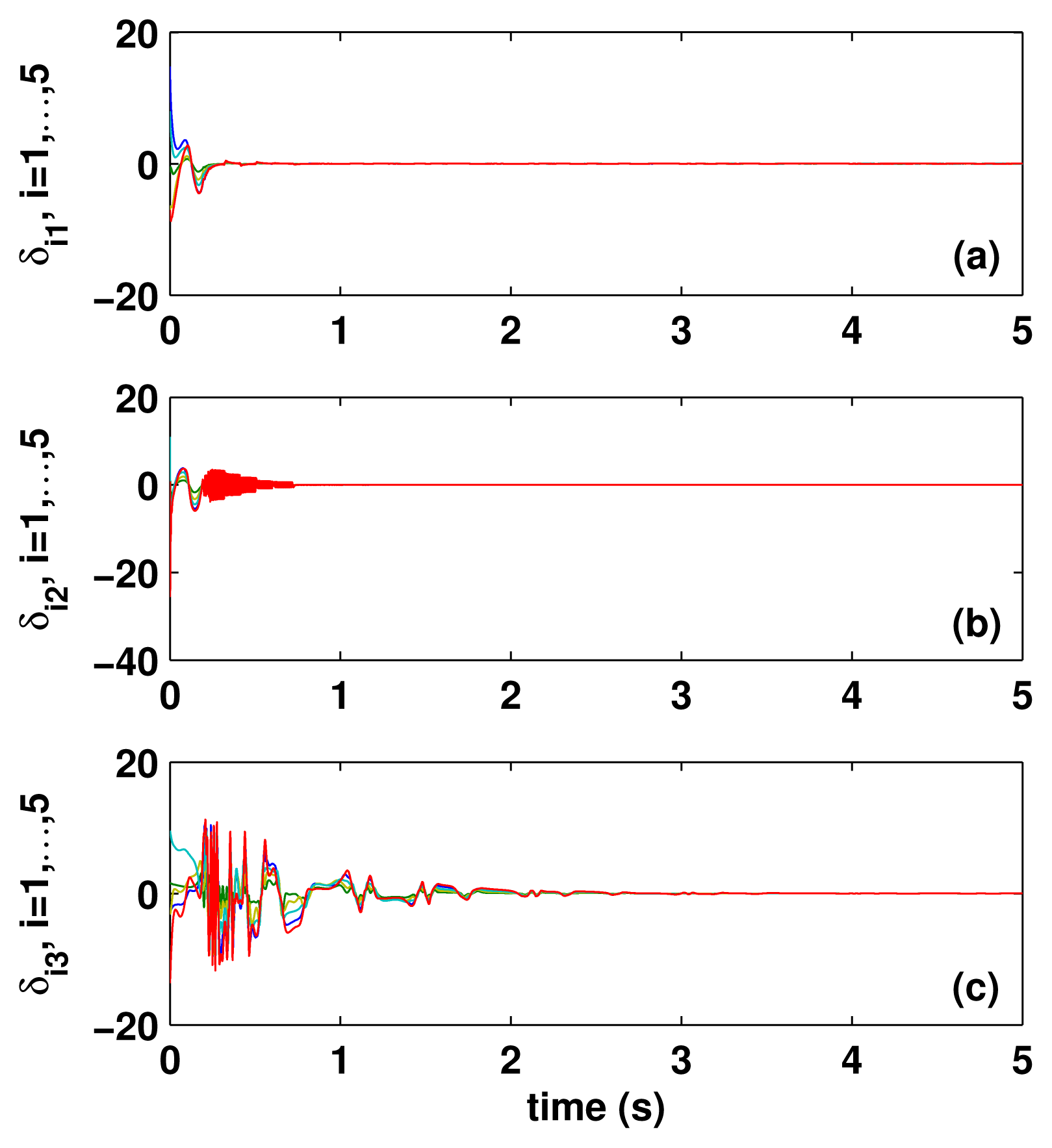
4. Numerical Simulation
are given by:5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Murray, R.M. Recent research in cooperative control of multivehicle systems. J. Dyn. Syst. Meas. Control 2007, 129, 571–583. [Google Scholar]
- Lewis, F.L.; Zhang, H.; Hengster-Movric, K.; Das, A. Cooperative Control of Multi-Agent Systems: Optimal and Adaptive Design Approaches; Springer-Verlag: London, UK, 2014. [Google Scholar]
- Vicsek, T.; Czirók, A.; Ben-Jacob, E.; Cohen, I.; Shochet, O. Novel type of phase transition in a system of self-driven particles. Phys. Rev. Lett 1995, 75, 1226–1229. [Google Scholar]
- Jadbabaie, A.; Lin, J.; Morse, A. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control 2003, 48, 988–1001. [Google Scholar]
- Olfati-Saber, R.; Murray, R. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2004, 49, 1520–1533. [Google Scholar]
- Moreau, L. Stability of multi-agent systems with time-dependent communication links. IEEE Trans. Autom. Control 2005, 50, 169–182. [Google Scholar]
- Ren, W.; Beard, R.W. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Trans. Autom. Control 2005, 50, 655–661. [Google Scholar]
- Olfati-Saber, R. Flocking for multi-agent dynamic systems: algorithms and theory. IEEE Trans. Autom. Control 2006, 51, 401–420. [Google Scholar]
- Ren, W. On consensus algorithms for double-integrator dynamics. IEEE Trans. Autom. Control 2008, 53, 1503–1509. [Google Scholar]
- Lin, P.; Li, Z.; Jia, Y.; Sun, M. High-order multi-agent consensus with dynamically changing topologies and time-delays. IET Control Theory Appl 2011, 5, 976–981. [Google Scholar]
- Zhu, J.; Yuan, L. Consensus of high-order multi-agent systems with switching topologies. Linear Algebra Appl 2014, 443, 105–119. [Google Scholar]
- Tuna, S.E. Synchronizing linear systems via partial-state coupling. Automatica 2008, 44, 2179–2184. [Google Scholar]
- Seo, J.H.; Shim, H.; Back, J. Consensus of high-order linear systems using dynamic output feedback compensator: Low gain approach. Automatica 2009, 45, 2659–2664. [Google Scholar]
- Li, Z.; Duan, Z.; Chen, G.; Huang, L. Consensus of multiagent systems and synchronization of complex networks: A unified viewpoint. IEEE Trans. Circuits Syst. I Regul. Pap 2010, 57, 213–224. [Google Scholar]
- Ma, C.; Zhang, J. Necessary and sufficient conditions for consensusability of linear multi-agent systems. IEEE Trans. Autom. Control 2010, 55, 1263–1268. [Google Scholar]
- Zhang, H.; Lewis, F.L.; Das, A. Optimal design for synchronization of cooperative systems: State feedback, observer and output feedback. IEEE Trans. Autom. Control 2011, 56, 1948–1952. [Google Scholar]
- Scardovi, L.; Sepulchre, R. Synchronization in networks of identical linear systems. Automatica 2009, 45, 2557–2562. [Google Scholar]
- Ni, W.; Cheng, D. Leader-following consensus of multi-agent systems under fixed and switching topologies. Syst. Control Lett 2010, 59, 209–217. [Google Scholar]
- Qin, J.; Yu, C.; Gao, H. Coordination for linear multiagent systems with dynamic interaction topology in the leader-following framework. IEEE Trans. Ind. Electron 2014, 61, 2412–2422. [Google Scholar]
- Li, Z.; Ren, W.; Liu, X.; Fu, M. Consensus of multi-agent systems with general linear and Lipschitz nonlinear dynamics using distributed adaptive protocols. IEEE Trans. Autom. Control 2013, 58, 1786–1791. [Google Scholar]
- Wen, G.; Duan, Z.; Chen, G.; Yu, W. Consensus tracking of multi-agent systems with Lipschitz-type node dynamics and switching topologies. IEEE Trans. Circuits Syst. I Regul. Pap 2014, 61, 499–511. [Google Scholar]
- Xu, W.; Cao, J.; Yu, W.; Lu, J. Leader-following consensus of non-linear multi-agent systems with jointly connected topology. IET Control Theory Appl 2014, 8, 432–440. [Google Scholar]
- Peng, Z.; Wang, D.; Zhang, H.; Sun, G. Distributed neural network control for adaptive synchronization of uncertain dynamical multiagent systems. IEEE Trans. Neural Netw. Learn. Syst 2014, 25, 1508–1519. [Google Scholar]
- Li, Z.; Duan, Z.; Lewis, F.L. Distributed robust consensus control of multi-agent systems with heterogeneous matching uncertainties. Automatica 2014, 50, 883–889. [Google Scholar]
- Lü, J.; Chen, G. A time-varying complex dynamical network model and its controlled synchronization criteria. IEEE Trans. Autom. Control 2005, 50, 841–846. [Google Scholar]
- DeLellis, P.; DiBernardo, M.; Garofalo, F. Novel decentralized adaptive strategies for the synchronization of complex networks. Automatica 2009, 45, 1312–1318. [Google Scholar]
- Demetriusa, L.; Manke, T. Robustness and network evolution-an entropic principle. Physica A 2005, 346, 682–696. [Google Scholar]
- Xiao, Y.-H.; Wu, W.-T.; Wang, H.; Xiong, M.; Wang, W. Symmetry-based structure entropy of complex networks. Physica A 2008, 387, 2611–2619. [Google Scholar]
- Anand, K.; Bianconi, G. Entropy measures for networks: Toward an information theory of complex topologies. Phys. Rev. E 2009, 80. [Google Scholar] [CrossRef]
- Mowshowitz, A.; Dehmer, M. Entropy and the complexity of graphs revisited. Entropy 2012, 14, 559–570. [Google Scholar]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J 1948, 27. [Google Scholar]
- Arenas, A.; Díaz-Guilera, A.; Kurths, J.; Moreno, Y.; Zhou, C. Synchronization in complex networks. Phys. Rep 2008, 469, 93–153. [Google Scholar]
- Kocarev, L. Consensus and synchronization in complex networks; Springer-Verlag: Berlin, Germany, 2013. [Google Scholar]
- Hong, Y.; Hu, J.; Gao, L. Tracking control for multi-agent consensus with an active leader and variable topology. Automatica 2006, 42, 1177–1182. [Google Scholar]
- Khoo, S.; Xie, L.; Man, Z. Robust finite-time consensus tracking algorithm for multirobot systems. IEEE/ASME Trans. Mechatron 2009, 14, 219–228. [Google Scholar]
- Lancaster, P.; Rodman, L. Algebraic Riccati Equations; Oxford University Press: Oxford, UK, 1995. [Google Scholar]
- Slotine, J.J.; Li, W. Applied Nonlinear Control; Prentice Hall: Upper Saddle River, NJ, USA, 1991. [Google Scholar]
- Yu, H.; Xia, X. Adaptive consensus of multi-agents in networks with jointly connected topologies. Automatica 2012, 48, 1783–1790. [Google Scholar]
- Das, A.; Lewis, F.L. Distributed adaptive control for synchronization of unknown nonlinear networked systems. Automatica 2010, 46, 2014–2021. [Google Scholar]
- Lee, T.H.; Park, J.H.; Ji, D.H.; Jung, H.Y. Leader-following consensus problem of heterogeneous multi-agent systems with nonlinear dynamics using fuzzy disturbance observer. Complexity 2014, 19, 20–31. [Google Scholar]
- Chen, G.; Ueta, T. Yet another chaotic attractor. Int. J. Bifurc. Chaos 1999, 9, 1465–1466. [Google Scholar]

© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Wang, J.; Chen, K.; Ma, Q. Adaptive Leader-Following Consensus of Multi-Agent Systems with Unknown Nonlinear Dynamics. Entropy 2014, 16, 5020-5031. https://doi.org/10.3390/e16095020
Wang J, Chen K, Ma Q. Adaptive Leader-Following Consensus of Multi-Agent Systems with Unknown Nonlinear Dynamics. Entropy. 2014; 16(9):5020-5031. https://doi.org/10.3390/e16095020
Chicago/Turabian StyleWang, Junwei, Kairui Chen, and Qinghua Ma. 2014. "Adaptive Leader-Following Consensus of Multi-Agent Systems with Unknown Nonlinear Dynamics" Entropy 16, no. 9: 5020-5031. https://doi.org/10.3390/e16095020
APA StyleWang, J., Chen, K., & Ma, Q. (2014). Adaptive Leader-Following Consensus of Multi-Agent Systems with Unknown Nonlinear Dynamics. Entropy, 16(9), 5020-5031. https://doi.org/10.3390/e16095020