
A Laguerre-Type Action for the Solution of Geometric Constraint Problems

Abstract
1. Introduction
2. Basic Facts and Notations
- (1)
- If we consider such that and , then , (with defined as before) and . Thus, by the previous equalitiesand sowith representing the equation of the sphere .
- (2)
- If we consider such that , then and with . In particular, if , then is the equation of a hyperplane .
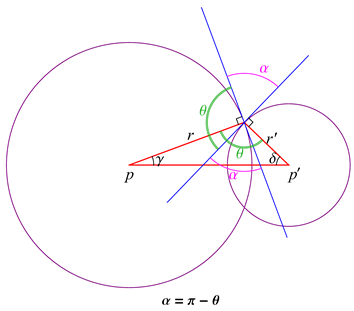
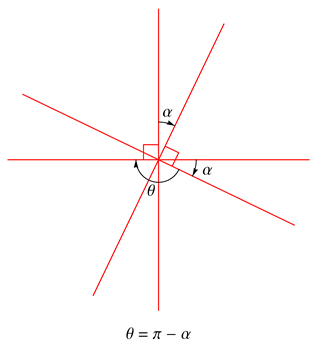
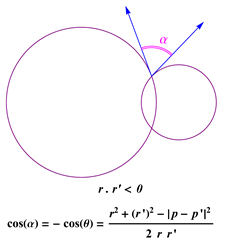
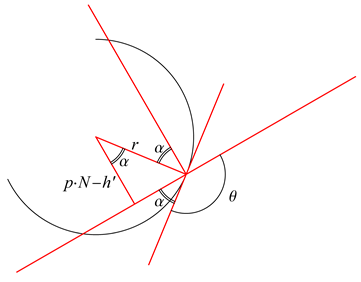
3. Oriented Angles




4. Automorphisms for Geometric Constraint Problems
5. Transitivity and Isotropies of the Action
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lie, S. Über Komplexe, Inbesondere Linien- und Kugelkomplexe, mit Anwendung auf der Theorie der Partieller Differentialgle-Ichungen. Math. Ann. 1872, 5, 145–256. [Google Scholar] [CrossRef]
- Pinkall, U. Dupin hypersurfaces. Math. Ann. 1987, 270, 427–440. [Google Scholar] [CrossRef]
- Berger, M. Géométrie T1; Collection FAC; Fernand Nathan: Paris, France, 1990. [Google Scholar]
- Berger, M. Géométrie T2; Collection FAC; Fernand Nathan: Paris, France, 1990. [Google Scholar]
- Cecil, T.E. Lie Sphere Geometry: With Applications to Submanifolds; Universitext; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pali, N. A Laguerre-Type Action for the Solution of Geometric Constraint Problems. Geometry 2025, 2, 2. https://doi.org/10.3390/geometry2010002
Pali N. A Laguerre-Type Action for the Solution of Geometric Constraint Problems. Geometry. 2025; 2(1):2. https://doi.org/10.3390/geometry2010002
Chicago/Turabian StylePali, Nefton. 2025. "A Laguerre-Type Action for the Solution of Geometric Constraint Problems" Geometry 2, no. 1: 2. https://doi.org/10.3390/geometry2010002
APA StylePali, N. (2025). A Laguerre-Type Action for the Solution of Geometric Constraint Problems. Geometry, 2(1), 2. https://doi.org/10.3390/geometry2010002