Abstract
We introduce the notion of bornological approach nearness as a unified extension of various classical nearness structures. By redefining completeness within this framework, we establish a generalized version of the Niemytzki–Tychonoff theorem. Our results not only extend known compactness criteria in nearness spaces but also offer a new perspective that incorporates boundedness and bornological methods in the theory of approach spaces.
Keywords:
approach bornology; approach distance; approach nearness; pseudonearness; Niemytzki–Tychonoff theorem MSC:
54A05; 54D15; 54D30; 54E05; 54E15; 54E17; 54E35; 54E45; 54E50
1. Introduction
The bornological approach to nearness provides a high-level framework that enables the analysis of nearness-like concepts from the perspective of boundedness rather than traditional open sets. This shift in viewpoint has proven especially useful in the study of non-normable structures and generalizations of topological and uniform spaces. Over the years, several classical frameworks have been introduced in this context, including metric spaces, proximity spaces, contiguity spaces, uniform spaces, merotopic spaces, pseudonearness spaces, b-uniform spaces, supertopological spaces, approach spaces, and approach nearness spaces. Each of these models offers a different perspective on the concept of “closeness” or “nearness” in mathematical structures. In particular, near sets in the sense of Peters [1] provide a formal basis for observation, comparison, and classification of perceptual granules in information science. The importance of the near set theory from a perceptual standpoint was highlighted in [1], motivated by applications in image analysis and inspired by the way humans perceive the nearness of physical objects. In essence, the central concern of near set theory is to discover relations between multiple samples based on the degree of similarity or closeness of their feature descriptions. A bornological nearness space, which quantifies nearness among collections of bounded sets, presents a potentially more robust framework for such investigations. This makes the bornological viewpoint particularly attractive in the context of perceptual data analysis, where boundedness plays a fundamental role. Another important direction in the generalization of nearness concepts is the study of generalized approach spaces, particularly those valued in a quantale [2]. In this setting, the notion of potential isomorphisms becomes relevant. It has been shown that the category of generalized approach spaces and injective maps can be encoded using higher-order structures. An alternative approach involves the use of order structures, which are always relative. Two structures are said to be potentially isomorphic if they become isomorphic in some larger model of set theory. This notion is important because sometimes non-isomorphic structures only appear different due to their particular representations, not due to any intrinsic structural difference. A comprehensive study of quantale-valued generalizations of approach spaces can be found in [3]. Closer to classical topological concerns is the concept of supported approach spaces [4]. These spaces are defined as pairs , where X is a set and is a distance function satisfying specific axioms. Approach spaces [5] serve as a simultaneous generalization of quasi-metric spaces and topological spaces. The category of topological spaces with continuous maps and the category of quasi-metric spaces with non-expansive maps can be both embedded into the category of approach spaces. Each approach space has a quasi-metric and a topological coreflection, but different approach spaces may share the same coreflections. When the coreflections uniquely determine the approach space, it is referred to as supported. Many examples of supported approach spaces appear in the compact case, where contraction mappings play a key role [4]. Furthermore, the notion of completeness in nearness spaces has been explored via various generalizations of Cauchy sequences. For instance, Herrlich [6] used clusters for completing nearness spaces; Carlson [7] employed near-ultrafilters; Herrlich and Bentley [8] introduced bunches for the completion of merotopical spaces (a generalization of nearness spaces); and Leseberg and Vaziry [9] developed the concept of b-completeness in pseudonear spaces via neartapes. In classical analysis, a metric space is compact if and only if it is complete and totally bounded. Carlson extended this result, along with the Niemytzki–Tychonoff theorem, to the setting of nearness spaces using ultrafilter completeness [10]. These generalizations laid the groundwork for further development in approach nearness spaces. In the present study, we aim to build upon these foundations by introducing a new and convenient notion of completeness and by presenting an extended version of the Niemytzki–Tychonoff theorem within the framework of bornological approach nearness spaces.
2. Preliminary Material (PM)
Definition 1.
A bornology on a set X is a non-empty subset which possesses the following properties:
- (b1)
- implies ;
- (b2)
- implying ;
- (b3)
- implies .
Then, the pair is called a bornological space [11].
Definition 2.
An approach bornology (in short apb) on a set X consists of a pair , where is a bornology on X and is a distance function satisfying the following properties:
- (apb1)
- implies , where ;
- (apb2)
- and implying ;
- (apb3)
- implies ;
- (apb4)
- implies ;
- (apb5)
- and implying .
- For an approach bornology , the triple is said to be an approach bornological space (in short apb-space), and we denote by APB the corresponding class of apb-spaces.
- For apb-spaces and , a function is said to be a bb-contraction (in short bbc-map), provided that f is bounded and satisfies the following conditions: implies , and for any and , the inequality holds. By APB2, we denote the category whose object class is APB and whose morphisms are the bbc-maps. In this context, we note that bornologies, approach distances, as well as generalized Kuratowski closure operators have a corresponding counterpart in APB [12].
Definition 3.
An approach distance is a function such that for any and , the following conditions are satisfied:
- (D1)
- ;
- (D2)
- ;
- (D3)
- ;
- (D4)
- .
The pair is called an approach space [5].
Definition 4.
A function is called an approach nearness on X if for any , the following conditions are satisfied:
- (AN1)
- implies ;
- (AN2)
- implies ;
- (AN3)
- implies ;
- (AN4)
- ;
- (AN5)
- , where .
- The pair is called an approach nearness space [10].
- For any approach nearness spaces , , a map is called a contraction if for all . ANEAR denotes the category of approach nearness spaces and contractions.
Definition 5.
A pair , consisting of a bornology and a hull-operator , is called a b-topology on X, and the triple is a b-topological space provided that h satisfies the following conditions:
- (h1)
- ;
- (h2)
- implies ;
- (h3)
- implies ;
- (h4)
- implies ;
- (h5)
- implying ;
- (h6)
- , implies [9].
For b-topological spaces and , a function is called a bi-bounded continuous map (in short bic-map) provided that it is bi-bounded and fulfills the following condition (c), i.e.,
- (c)
- implies .
By b-TOP, we denote the category whose objects are the b-topological spaces and whose morphisms are the bic-maps.
Definition 6.
A pair , consisting of a bornology and a nearoperator with for any , is called pseudonearness, and the triple is called the pseudonearness space (in short psn-space) provided that the following axioms are valid:
- (psn1)
- and implying ;
- (psn2)
- and implying ;
- (psn3)
- and , implying ;
- (psn4)
- and implying , where ;
- (psn5)
- implies ;
- (psn6)
- implies ;
- (psn7)
- implies , where ;
- (psn8)
- and implying [9].
For psn-spaces and , a function is called a binear-map (in short bin-map) provided that it satisfies the following conditions:
- (b)
- is bounded;
- (i)
- implies ;
- (n)
- and imply .
By PSN, we denote the category of psn-spaces and bin-maps.
3. Bornological Approach Nearness
The striking similarities in the concepts of approach nearness, b-topology, bornology, approach bornology, and pseudonearness [PM], respectively, lead us now to consider the following useful explanations:
Definition 7.
For a set X, let be a bornology. A pair , where denotes a function, is said to be a bornological approach nearness (in short b-apnearness), provided that the following conditions are satisfied:
- (b-apn1)
- implies , where ;
- (b-apn2)
- , and , implying that , where ;
- (b-apn3)
- ;
- (b-apn4)
- implies ;
- (b-apn5)
- , , implying , where ;
- (b-apn6)
- implies .
The triple is called a bornological approach nearness space (in short b-apnear space). For b-apnear spaces , a function is called b-apnear contraction (in short bac-map) provided that it is
- (bac1)
- bounded by satisfying ;
- (bac2)
- rebounded by satisfying , which implies that ;
- (bac3)
- implies .
By b-ANEAR, we denote the category, whose objects are the b-apnear spaces and whose morphisms are the bac-maps.
Remark 1.
Additionally, we note that any b-apnear space with constitutes an approach nearness space [10], and every approach nearness space is of such a kind. Thus, a b-apnear space is called saturated, provided that is valid, and we denote by SATb-ANEAR the full subcategory of b-ANEAR whose objects are saturated. Hence, SATb-ANEAR and ANEAR are essentially the same constructs.
Remark 2.
Further, it is interesting to note that for any b-apnear space , constitutes a b-topological operator, and the pair is called the underlying b-topology of [PM].
- In the saturated case, forms a Kuratowski closure operator. In fact, , otherwise for some , and contradicts because of , implying that . implies by (b-apn1). and , implying , and , implying . Thus, . implies , since implies ; hence, , and the claim follows.
- and , implying . But implies .
- Thus, , implying , or ; hence, or , implying .
- To this end, let and . implies ; hence, is valid, which shows that . Evidently, is symmetric.
- Conversely, any b-topology determines a b-apnearness by setting for if and only if ; otherwise, . Then, given a bivalent indicating that , b-apnear space is said to be topological, provided that for , iff . By denoting TOPb-ANEAR as the full subcategory of b-ANEAR, whose objects are topological, then TOPb-ANEAR and sb-TOP (the category of symmetric b-topological spaces and bic-maps) [PM] are isomorphic.
Example 1.
Now, we give a further important example.
- For a pseudonearness , we consider the function by setting for , if and only if , meaning that the bounded sets of are near; otherwise, . Then, constitutes a bivalent b-apnear space.
Proof.
For (b-apn1), let ; our goal is .
- So, let ; hence, , implying . And implies . Thus, . But implies , which has to be shown.
- For (b-apn2), let for , , ; our goal is . So, let , then . For , we can find with ; thus, , which implies , and follows by the hypothesis, which shows the claim.
- For (b-apn3), for , let . Suppose that , hence , implying , which is contradictory. Thus, .
- For (b-apn4), for and , choose , . Thus, for , follows such that . Consequently, implies .
- For (b-apn5), for let (without restriction ). Then, we can find with , where , for some and some . But implies , and consequently, and follow, which imply and . Thus, leads to .
- Conversely, let . Then, follows. Hence, there exist , and , as well. Consequently, is obtained. Otherwise, implies or . In the first case, or . But implies by the symmetry of M, and thus, is obtained, which is contradictory. The second case can then be handled analogously. Altogether, follows. Now, let , and suppose that . By the bivalence of M, leads to , which is contradictory, and the claim is obtained.
- For (b-apn6), let ; our goal is . For , we have to show that is valid. So, let , and then, since , by the hypothesis. Further, we have and , which imply that and follow, thus showing the claim.
- Conversely, let be a bivalent b-apnearness; then constitutes a pseudonearness, where and for , , such that the following equations hold:
- (i)
- ;
- (ii)
- .
- For the first equation, we note that is near the operator [PM].
- For (psn1), and, without restriction, . Then, and , implying .
- For (psn2), now, for , let . Our goal is and . By the hypothesis, implies .
- Thus, . In the following, let ; our goal is , which means that . But , and the claim follows.
- For (psn3), let for , . Then, , implying , and is obtained.
- For (psn4), , and , imply . But , implying and . Thus, or , implying or .
- For (psn5), the definition is evident.
- For (psn6), since , is valid.
- For (psn7), and implies ; hence, , implying , and thus, .
- For (psn8), for and, without restriction, , let . Then, . But , implying . Thus, with , implying .
- For (i), let for , ; and supposing that , then for some . implies , which is contradictory. In the other case, is also contradictory. If , then our goal is . By the hypothesis, , because, if not, implies , which is contradictory. Choose ; then implies , and hence follows. In the second case, , and if supposing , follows, which is contradictory, and the claim follows. Note also that the bivalence is of great importance in the former proof.
- For (ii), let, without restriction, . implies . Hence, , implying , and is obtained. Conversely, implies . Our goal is . For , we have ; hence, , implying . To conclude, let for psn-spaces , , be a function. Then the following statements are equivalent:
- (i)
- is bin-map;
- (ii)
- is bac-map.
- For , let , such that ; our goal is . implies for some ; hence, by the hypothesis, , implying that , and the claim is obtained.
- For , and imply . Hence, , implying that , which means . Thus, with . Note that f is especially rebounded; hence, follows. By denoting 2b-ANEAR as the full subcategory of b-ANEAR, whose objects are the bivalent b-apnear spaces, then the categories 2b-ANEAR and PSN are isomorphic. Hence, PSN can be considered as a fully embedded subcategory of b-ANEAR. □
Example 2.
For a bornology [PM], we set for , if and only if ; otherwise, . Then is a function from into , which is bivalent such that constitutes a b-apnearness. In this context, we call a bivalent b-apnearness sected, provided that for , if and only if for some . Evidently, is sected. Now, it is evident that the class of bornological spaces and that of sected b-apnear spaces are of the same cardinality! If one considers bi-bounded maps (in short, bib-maps) between bornological spaces, and denoting by SECb-ANEAR the full subcategory of b-ANEAR
(whose objects are sected) and by BORN2 the subcategory of BORN (whose morphisms are the bib-maps), then the categories
SECb-ANEAR and BORN2 are isomorphic.
Before giving an additional important example, we note the following proposition.
Proposition 1.
Any b-apnear-space has an underlying approach bornology [PM], where is defined by setting for and , .
Proof.
For (apb1), for , let , then implies ; hence, shows .
- For (apb2), let and ; our goal is .
- .
- For (apb3), implies .
- For (apb4), implies , and shows the claim.
- For (apb5), and , , implying that .
- Conversely, we have . Consequently, follow, implying that .
- Notably, we point out that is particularly symordered. □
Definition 8.
An apb is said to be symordered by satisfying the following conditions:
- (so1)
- is symmetric, i.e., , implying ;
- (so2)
- is ordered, i.e., and , implying .
By SO-APB2, we denote the full subcategory of APB2, whose objects are symordered [PM].
Example 3.
- (i)
- For every bornological space , is symordered, where for , , iff ; otherwise, ;
- (ii)
- For any pseudonearness , is symordered, where iff ; otherwise, ;
- (iii)
- For any b-approach nearness , is symordered;
- (iv)
- For any metric space , is symordered;
- (v)
- For any symmetric approach space [PM], is symordered.
Now, we return to our proposed example.
Example 4.
For a symordered apb , we set for : . Then the pair constitutes a b-approach nearness on X.
Proof.
For (b-apn1), for , let . Then implies . In particular, , implying , and follows.
- For (b-apn2), let , with ; our goal is . For , we can find such that , which, for , implies . Hence, is a lower bound of . Thus, . But is an upper bound of ; hence, .
- For (b-apn3), . Since , for any . Hence, is obtained.
- For (b-apn4), implies . Since , follows for any , which implies , and the claim is obtained.
- For (b-apn5), let , ; our goal is .
- and and . Now, for and , , we have or . In the first case, implies , and in the second case, implies ; hence, follows, which shows the claim.
- For (b-apn6), let ; we have to show that . For and , we have , which implies . Thus, implies , and the claim is obtained as a result. □
Corollary 1.
For any symordered apb , holds.
Proof.
For , let ; then . But , implying . □
Definition 9.
An apb is said to be b-near surrounded provided that for some b-apn .
Remark 3.
Now, we can state that any symordered apb is b-near surrounded. In particular, this also holds for any symmetric approach space , even when compared with 2.8. Note that this must not hold for any approach space!
- Completeness is a well-known property in topology and is important for several significant results. So, par example, the Niemytzki–Tychonoff theorem [13] for completely regular spaces states that the necessary and sufficient condition for a space being compact is that every compatible uniform structure is complete. To generalize this theorem for a more convenient context of b-approach nearness spaces, we define completeness of b-apnear spaces in a new manner, which differs from that given in [10], but it coincides in serious cases, such as metric, uniform, or proximity spaces, respectively (see also the Section 1).
Definition 10.
For a b-apnear space , is said to be a filter (in ) provided it satisfies the following conditions:
- (bF1)
- ;
- (bF2)
- and , implying ;
- (bF3)
- , , implying .
is a filter in ; this denotes the set of all filters in .
Definition 11.
is called a primefilter if and only if is a maximal element in the set , ordered by the inclusion. Note that for any , constitutes an primefilter in .
Definition 12.
A b-apnearness is said to be primecomplete provided that for any primefilter in with , the intersection is not empty. In this case, we discuss about primecomplete b-apnearness, and the space is called a primecomplete b-apnear space. In this context, we note that any topological b-apnear space is primecomplete. The next two descriptions generalize the ordinary traditional notions in classically considered spaces like topologies, uniformities, proximities, metrics, and apnearnesses.
Definition 13.
For a b-apnearness space , the underlying b-topology is said to be compact provided that with , where is finite such that .
Definition 14.
A b-apnearness and the corresponding space are called precompact provided that , and is finite with , implying .
Remark 4.
In this context, we note that is precompact if and only if it satisfies the condition that for any filter , .
Theorem 1.
Let be a b-apnear space. Then the underlying b-topology of is compact if and only if is precompact and primecomplete.
Proof.
Let be compact and be a primefilter with . Then is a set of v-closed sets such that any finite subset satisfies . Thus, by the hypothesis, , implying that is primecomplete. On the other hand, to prove that is precompact, let . Then for any subset , we have ; hence, follows by the hypothesis. Thus, for some , and consequently , implying that . By 2.18, is precompact.
- Conversely, let be primecomplete and precompact. For a collection of v-closed subsets of X such that for all finite subsets with , we obtain by the hypothesis. Hence, for some primefilter implies , and follows by the hypothesis. Thus, shows the claim.
- In approaching the announced theorem, a b-apnearness on a b-topological space is said to be t-compatible if and only if . □
Lemma 1.
Let a symmetric b-topology be given; then, is a compatible precompact b-apnearness on X, where for , iff , and is finite; otherwise, .
Proof.
Evidently, is a b-apnearness. Now, for , , implying , and we can choose with . By the symmetry, we obtain , since is topological.
- Conversely, let ; then by the definition, implies , which shows the claim. Finally, let be finite with . Then follows for some . By using the compatibility condition, is obtained by the definition. Now, we are able to formulate the generalization of the Niemytzki–Tychonoff theorem for b-apnear spaces. □
Theorem 2.
A symmetric b-topological space is compact if and only if every compatible b-apnearness is primecomplete.
Proof.
Let be a symmetric b-topological space and every compatible b-apnearness be primecomplete. Then, is primecomplete as it is t-compatible and, in addition, precompact. By applying the former theorem, is compact. For the converse, use the former theorem as well, and see also the explanations in the Section 1. □
Short Summary 1.
The present paper provides an extended insight of nearness-like concepts [14], which have always been fruitful in studying topological problems. So, it was possible to integrate the fundamental basics of approach nearness, bornology, b-topology, and pseudonearness as well. Using prime completeness, the generalization of various theorems is carried out in b-approach nearness spaces. As an example, a uniform space is compact if and only if it is complete and totally bounded. Carlson [7] generalized this theorem and the Niemytzki–Tychonoff theorem for a nearness space [2]. And, by the assistance of prime completeness, we have establish these theorems in the framework of b-approach nearness spaces.
Application 1.
It may surely be of interest to consider the problem of topological extensions of b-apnearness. For example, is it possible to densely embed any bornotopological approach nearness space into a prime complete one, such that in special cases, classical completions are obtained as a result? Moreover, in this context, do we obtain a natural correspondence between strict bornotopological extensions [9] and corresponding bornological b-apnearness spaces? Closely related to the canonical construction which embeds each pseudonear space into a b-complete pseudonear space, we introduce the notion of a so-called bornotopological extension. It turns out that this concept is convenient for studying strict topological extensions. A main result is that we obtain a natural correspondence between equivalence classes of strict bornotopological extensions and preceding pseudonear spaces, which is both onto and one-to-one.
Figure 1 shows the diagram of some important categories.
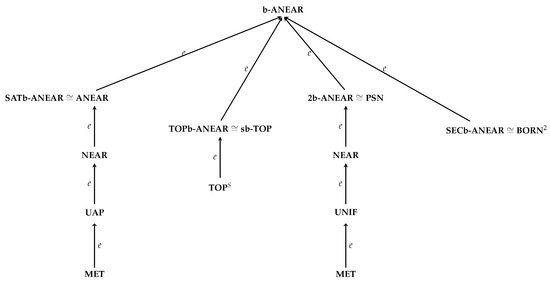
Figure 1.
Diagram of some important categories. Legend: e = embedding; ≅: isomorphism. Acronyms: b-NEAR = Category of bornological approach nearness spaces and bac-maps. ANEAR = Category of approach nearness spaces and contractions. NEAR = Category of nearness spaces and n-maps. sb-TOP = Category of symmetric b-topological space and continuous maps. PSN = Category of pseudonear spaces and psn-maps. BORN2 = Category of bornological spaces and bib-maps. UAP = Category of uniform approach nearness spaces and contractions. MET = Category of metric spaces and non-expensive maps. TOP2 = Category of symmetric topological spaces and continuous maps. UNIF = Category of uniform spaces and uniform contraction maps. SATb-ANEAR = Full subcategory of b-ANEAR, whose objects are saturated. TOPb-ANEAR = Full subcategory of b-ANEAR, whose objects are topological. 2b-ANEAR = Full subcategory of b-ANEAR, whose objects are bivalent. SECb-ANEAR = Full subcategory of b-ANEAR, whose objects are sected.
Author Contributions
Conceptualization, D.L. and Z.V.; methodology, D.L. and Z.V.; software, D.L. and Z.V.; validation, D.L. and Z.V.; formal analysis, D.L. and Z.V.; investigation, D.L. and Z.V.; resources, D.L. and Z.V.; data curation, D.L. and Z.V.; writing—original draft preparation, D.L. and Z.V.; writing—review and editing, D.L. and Z.V.; visualization, D.L. and Z.V.; supervision, D.L. and Z.V. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors on request.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Peters, J.F.; Wasilewski, P. Foundations of near sets. Inf. Sci. 2009, 179, 3091–3109. [Google Scholar] [CrossRef]
- Ackerman, N.; Karker, M.L. Potential isomorphisms of generalized approach spaces. Quaest. Math. 2022, 45, 443–484. [Google Scholar] [CrossRef]
- Jäger, G. Quantale-valued generalizations of approach spaces L-approach systems. Topol. Proc. 2018, 51, 253–276. [Google Scholar]
- Colebunders, E.; Lowen, R. Supported approach spaces. Quaest. Math. 2023, 46, 161–190. [Google Scholar] [CrossRef]
- Lowen, R. Appproach spaces: A common supercategory of TOP and Met. Math. Nachrichten 1989, 141, 183–226. [Google Scholar] [CrossRef]
- Herrlich, H. A concept of nearness. Gen. Topol. Appl. 1974, 4, 191–212. [Google Scholar] [CrossRef]
- Carlson, J.W. B-completeness in nearness spaces. Gen. Topol. Appl. 1975, 5, 263–268. [Google Scholar] [CrossRef]
- Bentley, H.L.; Herrlich, H. Merotopological spaces. Appl. Categ. Struct. 2004, 12, 155–180. [Google Scholar] [CrossRef]
- Leseberg, D.; Vaziry, Z. On Bounded Near Operators; LAP Lambert Academic Publishing: London, UK, 2022. [Google Scholar]
- Khare, M.; Tiwari, S. Completion in a common supercategory of MET, UAP, ws AP and NEAR. Demonstr. Math. 2013, 46, 209–226. [Google Scholar] [CrossRef]
- Hogbe-Nlend, H. Theorie des Bornologies et Applications; Lecture Notes in Math. n. 213; Springer: Berlin/Heidelberg, Germany, 1971. [Google Scholar]
- Leseberg, D.; Vaziry, Z. Bounded Topology; LAP Lambert Academic Publishing: London, UK, 2019. [Google Scholar]
- Niemytzki, V.; Tychonoff, A. Beweis des Satzes, dass ein metrisierbarer Raum dann und nur dann kompact ist, wenn er in jeder Metrik vollstandig ist. Fund. Math. 1928, 12, 118–120. [Google Scholar] [CrossRef]
- Lowen, R.; Lee, Y.J. Approach theory in merotopic, Cauchy and Convergence Spaces I. Acta Math. Hung. 1999, 83, 189–207. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).