
Logics for Strategic Reasoning of Socially Interacting Rational Agents: An Overview and Perspectives


{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The STIT-based approach, building on the theory of “Seeing To It That” (STIT), originating from the seminal work of Belnap and Perloff [3]. For exploring the closer links of the present paper with STIT, the reader is referred to [13] and the overview chapter [14] on using STIT for strategic reasoning, as well as to [15] for temporal extensions of STIT and applications to normative reasoning, to [16] for using STIT for reasoning about social influence, and to [17] for providing semantics of temporal STIT in concurrent game models used in this paper.
Structure of the paper
2. Technical Preliminaries
2.1. Concurrent Game Models
- is a nonempty set of actions;
- is a mapping assigning to each a nonempty set of actions available to the player ;
- is a map assigning to every action profile a unique outcome in .
- is a nonempty set of (game) states;
- is a nonempty set of actions;
- is a game map, assigning to each state a strategic game formover the set of outcomes ;
- is a countable set of atomic propositions;
- is a labeling function, assigning to every state in the set of atomic propositions true at that state.
- An action profile is available at the state w if it consists of locally available actions, i.e., if .The set of all action profiles that are available at w will be denoted by .
- is the global outcome function assigning to every state w and an action profile the unique outcome .When is fixed by the context, it will be omitted from the subscript.
- More generally, given a coalition , a joint action for C in is a tuple of individual actions . In particular, for any action profile , is the joint action obtained by restricting to C. The joint action is locally available at the state w iff every individual action in it is locally available for the respective agent in w.
- For any , , and joint action that is available at w, we define the set of possible outcomes from the application of the joint action at the state w:In the special case when , is a full available action profile, so consists of the single outcome .
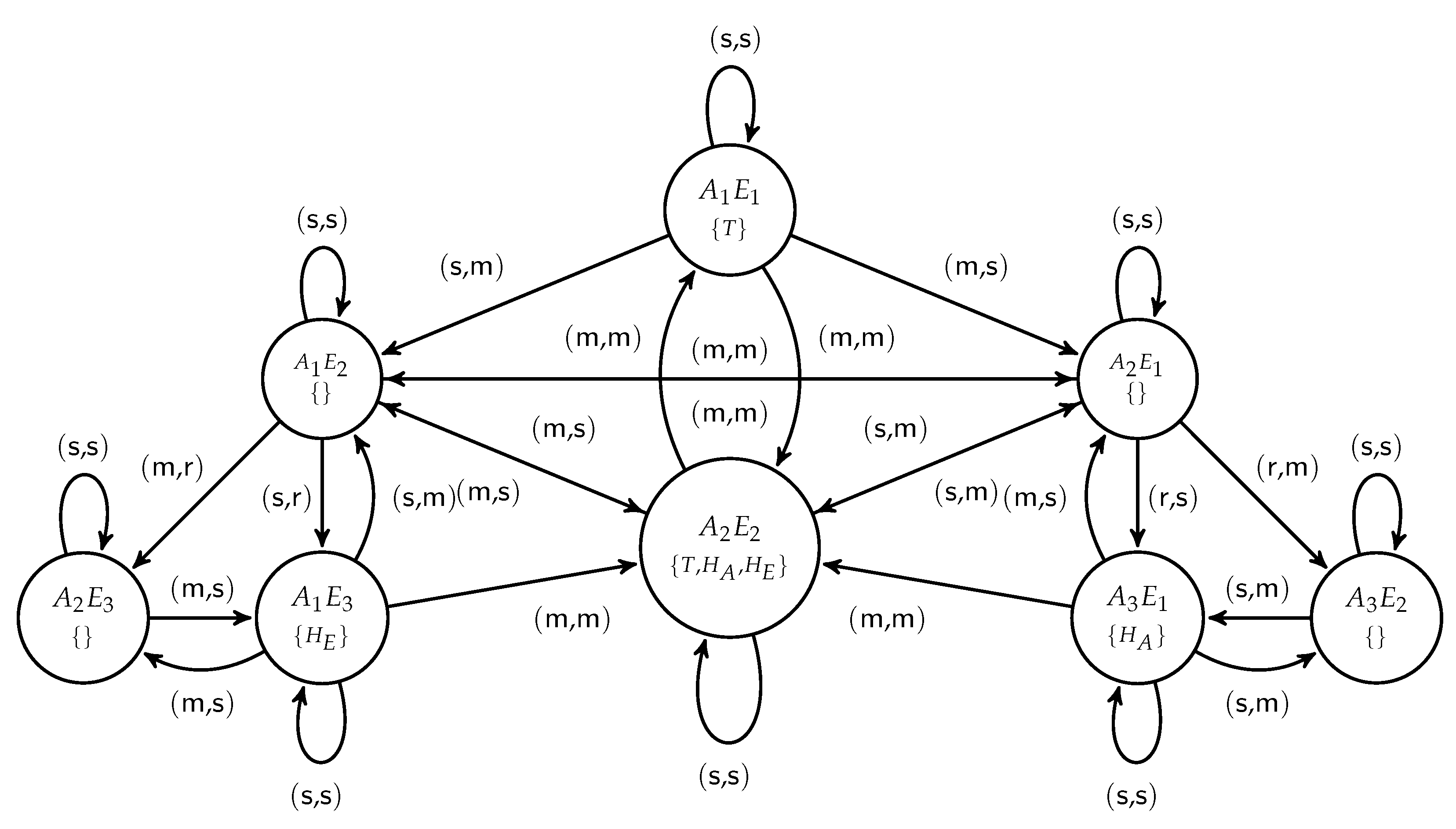
- The set of agents is .
- The set of game states is and the names of the states represent the current locations of the agents, e.g., means that Adam is in and Eve is in , etc. Thus, the names of the states can also be interpreted as pairs of atomic propositions saying “Adam is in room X” and “Eve is in room Y”. These atomic propositions, however, will not feature in the example.
- There are three atomic propositions of interest for us: , where:
- -
- T, which is true in a state iff Adam and Eve are in the same room (“together”), i.e., in and , as indicated in their labels;
- -
- , meaning “Adam is happy”, true in the states where is listed in the label;
- -
- , meaning “Eve is happy”, true in the states where is listed in the label.
- The global set of actions is , denoted in the figure, respectively, by . The transitions caused by the respective ordered pairs of actions are indicated on the figure (the first for Adam, and the second for Eve). For example, if at state both Adam and Eve choose to stay, then the transition, labeled with (s,s), is looping back to the same state, whereas if Adam chooses to stay and Eve chooses to move, the transition, labeled with (s,m), leads to the state , etc. These transitions also define the global outcome function .
- The global action function (defining the available actions to every agent at every state) can be readily extracted from the figure. For example, , , etc.
- Lastly, the labeling function is explicitly given in the figure, where the label of each state is given in .
2.2. Plays and Strategies in Concurrent Game Models
- Consider the strategy which prescribes the action if Adam and Eve are currently together, or else , if possible, otherwise, again, . If both Adam and Eve follow that strategy starting from , the induced play isRespectively, the induced play starting from is
- Consider the strategy which prescribes the action if the player is currently happy, or else if possible, otherwise , if possible, otherwise, .If both Adam and Eve follow starting from , the induced play is
- If Adam follows and Eve follows , the induced play starting from is
- Lastly, if Adam follows and Eve follows the strategy which prescribes the action only if both players are currently happy or if no other action is available, or else if possible, otherwise , then the induced play starting from is this happy ending:
3. A Variety of Strategic Abilities
- Strictly competitive and unconditional, where all agents, respectively, coalitions, act only in pursuit of their own goals and can be assumed to regard all others either as adversaries, or as behaving randomly. An alternative way of thinking here is that these are abilities of a given agent, respectively, coalition, to achieve goals independently of the actions of all other agents. Both interpretations make good sense in the context of this paper. The typical claim for such kind of local (immediate, one step) abilities is:“The coalition A has a joint action to ensure satisfaction of the coalitional goal of A in every outcome state that may result from that joint action”.This is the informal semantic reading of the strategic operator in the coalition logic [4,5], which will be presented in Section 4.Respectively, here is a typical long-term strategic ability claim:“The coalition A has a joint strategy to ensure satisfaction of the coalitional goal of A in every outcome play resulting from A following that strategy”.
- Competitive, but conditional on the other agents’ expected actions, where coalitions (respectively, agents) still act only in pursuit of their own goals, but, when deciding on their course of action, they take into account the goals and the respective expected actions of the other players, so they are not treated as adversaries (or, behaving randomly), but as rational agents pursuing their own goals. Here is a typical such claim expressing conditional strategic ability:“For some (or, every) joint action of the coalition A that ensures satisfaction of its goal , the coalition B has a joint action of its own to ensure satisfaction of its goal .There are (at least) two naturally arising readings of such conditional claims, as “proactive ability” and as “reactive ability”, and two respective versions of local strategic operators formalizing them. These were first introduced in [27] (respectively, as “de dicto” and “de re” abilities) and further studied in [28]. Conditional abilities will be discussed in more detail in Section 6.
- Socially cooperating abilities, where agents and coalitions still act in pursuit of their own goals, but when deciding on their course of action take into account the goals of other agents in the system and make allowance, if possible, for their satisfaction, too. Thus, agents and coalitions are assumed, i.e., not only rational but also cooperative, whenever possible to reconcile their interests with those of the others. Two natural examples of strategic operators formalizing such abilities are:
- (a)
- the “cooperative ability” operator , again introduced and studied in [27,28], which, when applied to (disjoint) coalitions A and B with respective goals and , formalizes the statement saying that“ has a joint action which guarantees the satisfaction of and enables to also apply a joint action that guarantees ”.This will be presented in more detail in Section 6.
- (b)
- The “socially friendly” coalitional operator SF, introduced and studied in [25], which is a somewhat more general version of , informally says that“A has a joint action that guarantees satisfaction of its goal and also enables the complementary coalition to realize any one of a list of secondary goals by applying a respectively suitable joint action”.The operator SF and the logic built on it will be presented in more detail in Section 7.
- Abilities for cooperation, protecting the interests of agents and coalitions. These capture the idea, complementary to that of , that, while socially responsible rational agents and coalitions contribute with their individual and collective actions to the society of all agents, they wish to perform that in a way that protects their individual and collective interests and goals. Such abilities are expressed by means of the coalitional goal assignment operator, introduced in [25] as a local operator and extended with temporalized long-term goals in [26]. A coalitional goal assignment is a mapping which assigns a goal formula to each possible coalition, and the operator formalizes the claim that there is a strategy profile of , the restriction of which to every coalition is a joint action that guarantees the satisfaction of its goal regardless of any possible behavior of the remaining agents. The coalitional goal assignment operator and the logics and built on it will be presented in more detail in Section 8.
4. Coalition Logic and Unconditional Local Strategic Reasoning
4.1. The Basic Logic for Coalitional Strategic Reasoning
4.2. Expressing Claims about Strategic Abilities in
- 1.
- If Eve has an action ensuring that she becomes happy, thenAdam cannot prevent Eve from reaching a state where she is happy.
- 2.
- The statement above naturally generalizes (with being an atomic proposition) toIf the agent has an action to guarantee reaching a “winning” outcome, then the coalition of all other agents cannot prevent from reaching a “winning” outcome.It should be intuitively clear that this statement expresses a valid principle of . Indeed, we will see shortly that this is the case.
- 3.
- Neither Adam nor Eve has an action ensuring that they stay together, but they have a joint action ensuring that.
- 4.
- Neither Adam nor Eve has an action ensuring happiness for himself/herself but they have a joint action ensuring happiness for both.
- 5.
- Adam cannot act so as to ensure at the outcome state that both Adam is happy and Eve does not have an action to ensure reaching her happiness.
- 6.
- Adam and Eve can act jointly so that at the outcome state Adam has an action to ensure reaching his happiness only if Eve has an action to ensure reaching her happiness.
- 7.
- Adam can act to ensure (at the outcome state), that Eve can then act to ensure that they are both happy and that each of them can act so as to keep the other happy.
4.3. Formal Semantics of CL
- iff , for .
- iff .
- iff and .
- iff there exists a joint action available at s,such that for each .
- ; .
- .
- .
- .
4.4. Axiomatizing the Validities of
- (Logically) valid if for every CGM and a state .
- Satisfiable if for some CGM and a state .
- -maximality:This axiom says that the grand coalition can act collectively so as to guarantee any goal that is satisfied in at least one outcome state. Note that the validity of this axiom presupposes that the models are deterministic, implying that the coalition of all agents can enforce any particular possible outcome.
- Safety:No coalition has the ability to ensure the falsum will become true.
- Liveness:Every coalition has the ability to ensure the truth will become true.
- Superadditivity: for any such that :This axiom scheme says that two disjoint coalitions, each of which has a joint action to guarantee satisfaction of their own goal, can join forces (simply by each of them following their respective joint action) to guarantee satisfaction of both goals.
- -monotonicity Rule:
- Outcome Monotonicity: .This is derived directly by applying the -monotonicity rule.
- Coalition Monotonicity: .This is derived by applying the superadditivity axiom scheme to the coalitions and with respective goals and ⊤. Note that this validity together with -maximality also implies the validity of , for any formula .
- Coalition complementarity: , where .This is derived by applying the superadditivity axiom scheme to the coalitions C and with respective goals and , and then the safety axiom scheme.
5. Logics for Unconditional Long-Term Strategic Reasoning
“The coalition C has a joint strategy to guarantee achievement of the coalitional goal of C in every outcome play resulting from C following that strategy”.
5.1. The Alternating-Time Temporal Logic
where is any formula of . The language of is formally defined as follows. It involves two sorts of formulae: state formulae, that are evaluated at game states, and path formulae, that are evaluated on game plays. These are, respectively, defined by the following grammars, where and :“The coalition has a joint strategy that guarantees the satisfaction of the goal on every outcome play induced by that joint strategy“,
| State formulae: | . | ||
| Path formulae: | . |
5.2. Formal Semantics of
iff there exists a joint strategy for C such that is true on every play in , i.e., every play starting at s and induced by .
- iff there exists a joint strategy such that for every play .
- iff there exists a joint strategy such that for every play and .
- iff there exists a joint strategy such that for every play there is for which and for all j such that .
5.3. Expressing Claims about Strategic Abilities in
- 1.
- If Eve has an action ensuring that she eventually becomes happy, then Adam cannot prevent Eve forever from reaching a state where she is happy.It should be intuitively clear that this statement expresses a valid principle of . Indeed, this is the case.
- 2.
- If has a strategy to keep the system in safe states forever and has a strategy to eventually achieve its goal, then has a strategy to keep the system in safe states until it achieves its goal.The formula above is not logically valid. Indeed, the strategies of to keep the system in safe states forever and to eventually achieve its goal may be incompatible.
- 3.
- If has a strategy to keep the system in safe states forever and has a strategy to eventually reach a goal state, then and together have a strategy to stay in safe states until a goal state is reached.Assuming that and are distinct agents, the formula above is logically valid, unlike the previous one. Indeed, this is due to the independence of the actions of the two agents, and hence of their abilities to execute their respective strategies.
- 4.
- The coalition A has a joint strategy to eventually ensure that the coalition B has a strategy to prevent φ from ever happening.This example raises the question of how the semantics works in the case of nested strategic operators. Suppose, the coalitions A and B intersect and is an agent in both of them. Then, the claim of the external strategic operator requires, inter alia, existence of a strategy for the agent within a joint strategy for A that guarantees the eventual satisfaction of the subformula . However, when evaluating that subformula, to justify its truth, one has to identify a respective joint strategy for . Now, the question arises whether the strategy of within should not be assumed to be already fixed by or, conversely, whether the strategy of within should not be assumed to be already fixed by . Note that the standard formal semantics for (in particular, of ) presented here does not impose any such constraints, but, rather, treats these strategies independently. That is, the standard semantics of does not commit the agents in A to the strategies they adopt in order to bring about the truth of the formula . That creates some conceptual issues with the very concept of “strategy”, independently addressed in different ways in [38,39,42,43], where several proposals were made in order to incorporate strategic commitment or uncommitment and persistent strategies in the syntax and semantics of . These raise a number of still open technical problems regarding constructing provably complete axiomatizations, proving decidability, and designing decision procedures for the variations of and mentioned above.
6. The Logic of Conditional Strategic Reasoning ConStR
6.1. Conditional Strategic Reasoning: An Informal Discussion
For some/every action of Alice that guarantees achievement of her goal ,
Bob has/does not have an action of his own to guarantee achievement of his goal .
6.1.1. Case 1: Bob Does Not Know Alice’s Goal or Actions
6.1.2. Case 2: Bob Knows Alice’s Goal and Possible Actions
“Whichever way Alice acts towards achieving her goal ,
Bob can act so as to ensure achievement of his goal ”.
6.1.3. Reactive and Proactive Ability
6.1.4. Case 3: Assuming Alice’s Cooperation
6.2. Modal Operators for Conditional Strategic Reasoning
- ()
- means that the coalition of agents who are in but not in has a joint action such that if applies any joint action that guarantees the truth of , then can ensure the truth of by applying .This operator formalizes the notion of a coalition’s proactive ability, discussed in the special case of single-agent coalitions in Section 6.1.3, respectively, to the game-theoretic notion of conditional α-effectivity, hence the notation. Note that the agents in (if any) are assumed to act on behalf of in its pursuit of .
- ()
- means that for any joint action of that guarantees the truth of , when applied by there is a joint action that guarantees when additionally applied by . Note that is vacuously true for any , , and , as then there cannot be such joint actions that enable satisfying ⊥. This may sounds odd, but it is no special phenomenon in , as the same effect occurs in FOL with universal quantification over an empty set of objects.This operator formalizes a claim of the ability of the coalition to choose a suitable joint action so as to achieve the goal assuming that acts so as to achieve the goal , if is to choose their joint action after learns the joint action of . In this case, the actions of the agents in (if any) are assumed to be already fixed by .This corresponds to the notion of agents’ reactive ability discussed in Section 6.1.3, respectively, to the game-theoretic notion of conditional β-effectivity, hence the notation.
- ()
- means that has a joint action which, when applied, guarantees the truth of and enables to apply a joint action that guarantees when additionally applied by .This operator formalizes Case 3 discussed in Section 6.1, where knows the goal of and can choose to cooperate with by selecting an action among those that ensure satisfaction of which is also suitable for .
6.3. The Logic : Language and Some Definable Operators
- The coalitional operator from is definable by means of each of , , as follows:
- ()
- .This claims an unconditional ability of to choose an action that guarantees .
- ()
- , or .The only strategy of the empty coalition guarantees the satisfaction of ⊤.
- ()
- or .
- is equivalent to in .
- The negated operator says that every joint action of that, when applied, guarantees the truth of , would prevent from acting additionally so as to guarantee . This formalizes the conditional reasoning scenario where the goals of and are conflicting, so whichever way acts towards its goal would block from acting to guarantee achievement of ’s goal.
- essentially formalizes the case when the agents in are not informed about the goal of , but have to choose their action after learning the action of .
- On the other hand, , also equivalent to , says that any joint strategy of that guarantees to be true also guarantees to be true. That formalizes the claim of an observer who knows both the goal and the possible joint actions of , that the outcome from the joint action of will also satisfy .
- says that there is a joint strategy of that ensures the truth of and also enables the satisfaction of .is also definable as , where .
- The coalitional operator from is a special case of the above: .
6.4. Formal Semantics of
- iff
- has a joint action such that for every joint action of ,if for every , then for every .
- iff
- for every joint action of such that for every ,has a joint action (generally, dependent on ) such thatfor every .
- iff
- has a joint action , such that for every andhas a joint action such that for every .
- 1.
- .
- 2.
- .
- 3.
- .
- 4.
- .
- 5.
- .
- 6.
- .
- 7.
- .
- Immediately from the semantic definitions, as implies .
- A counter-model is shown further, in Example 8.
- A counter-model is shown in Example 8.
- Follows from 1 and 3 above.
- This holds for the trivial reason that if in a given model the agent has no action that ensures the truth of p in the given state, then the antecedent is vacuously true, whereas the consequent is false there.
- Likewise.
- An easy semantic exercise.
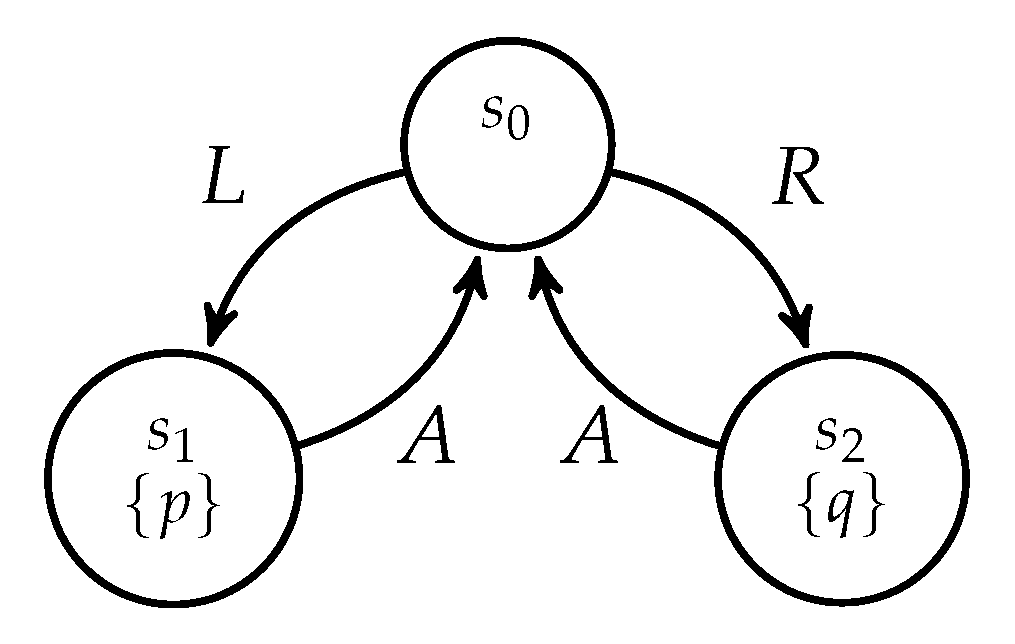
- 1.
- , whereas .Thus, an agent may have only conditional ability to achieve its goal.
- 2.
- . Indeed, neither nor ensures q against both choices and of . Thus, does not have a uniform action to ensure q against any action of that ensures p.
- 3.
- . Indeed, has two actions at state to ensure p: and . For each of them, has an action to ensure q: choose if chooses , and choose if chooses .Therefore, . Thus, the claim made by the proactive ability operator is stronger than the claim made by the reactive ability operator .
- 4.
- On the other hand, if the outcomes of and are swapped, then becomes true at in the resulting model.
- 5.
- Furthermore, clearly, is a valid formula in .
- 6.
- If the model is modified by making p true also at , then in the resulting model we have and .Therefore, .
- 7.
- Note also that does not satisfy the formula (where ); hence, it is not equivalent to .
6.5. On the Axiomatization and Decidability for
- ( 1)
- .
- ( 2)
- .
7. The Socially Friendly Coalition Logic SFCL
7.1. Socially Friendly Coalitional Operators
- SF
- The socially friendly coalitional operator SF takes any positive number of formulae as arguments and places them together into a single formula as follows:I will call the formula above the primary goal of the formula (and of the coalition C) and the formulae —the secondary goals of the formula.The intuitive meaning of the formula is that“C has a joint action that guarantees satisfaction of ϕ and also enables the complementary coalition to satisfy any one of the goals by applying a respectively suitable joint action”.The operator SF is a multiagent extension of the modal operator (note the different order of the arguments) in the instantial neighborhood logic (INL) introduced and studied in [45].The special case of the “socially friendly coalitional operator” with a single secondary goal is equivalent to the operator defined in Section 6.In particular, the strategic operator of is also definable here, as .
- SF1
- A refinement of SF: , meaning:“C has a collective action that guarantees ϕ, and is such that, when fixed,each has a collective action that guarantees ”.This definition presumes that if C intersects with , then the agents in are already committed to . On the other hand, the collective actions claimed to exist for each need not be compatible, similar to in the intuitive semantics of , which is a special case of SF1, where .
- SF2
- meaning: “ has a collective action to guarantee , and given that action… has a collective action to guarantee ”.This is a sequential version of SF1 where the coalitions are arranged in decreasing priority order.
7.2. Syntax and Semantics of the Logic
- iff
- there exists a joint action of available at s,
- such that for each state u in its outcome set ,
- and for each there is a state such that .
7.3. Example 1: Negotiating the Family Budget
- (cheap kitchen), (expensive kitchen), (any kitchen);
- (cheap car), (average car), (expensive car), (any car);
- (cheap trip), (expensive trip), (any trip).
- Ann can afford to pay for an expensive kitchen and then let the others choose some car or some trip, formally: .
- Alternatively, Ann can settle with a cheap kitchen, and then let the others choose between some car plus some trip, or an expensive car, or an expensive trip; formally: .
- However, if Ann opts for an expensive kitchen, then the family cannot afford an average car plus a trip; formally: .
- ;
- .
- However, .
- ;
- ;
- .
7.4. Example 2: Job Applicants
| Banana: | Megasoft: | Fakebook: | ||
| 1. Alice, 2. Bob, 3. Carl. | 1. Diana, 2. Bob. | 1. Alice, 2. Diana. |
- Indeed, Alice can take the offer from Fakebook and leave it to the others to decide on the other two positions. Note that Bob can then choose either offer and enable either Carl or Diana to obtain a job, but can also decline both offers and thus enable both of them to obtain a job.
- Alternatively, Alice can act selflessly by declining both offers, and thus enable all others to obtain a job (by Bob choosing Fakebook).
- Carl cannot be sure to obtain a job, but all others can be sure of this.
- Diana cannot be sure to obtain a job and enable the others to see to it that both Bob and Carl obtain a job, but she can ensure that she obtains a job (by accepting the offer from Megasoft) and then the others ensure that either Bob or Carl obtains a job, too.
- Alice and Diana together can ensure that they both obtain a job and then either of the other two can obtain a job, too, up to their choice.
- Alice and Diana can also be mean and act together so that only they obtain jobs, by accepting the respective offers from Banana and Megasoft and leaving the Fakebook position unfilled.
7.5. Socially Friendly Coalition Logic SFCL: A System of Axioms
- (INL5)
- This is a valid scheme. Indeed, for any formula , the strategy for C that ensures and enables each formula in the list either also ensures , in which case it can be added conjunctively to , or else enables , in which case it can be added to the list .
8. The Logic of Local Coalitional Goal Assignments (LCGA)
8.1. The Coalitional Goal Assignments Operator
8.2. Syntax and Semantics of the Logic
“There is a strategy profile of the grand coalition in which all agents participate with their individual strategies in such a way that, each agent or coalition guarantees the satisfaction of its own goal against any possible deviations of all other agents, thus protecting its individual (respectively, coalitional) interests.”
8.3. Some Observations and Examples of the Expressiveness of
- The operator , introduced in Section 6, is definable in terms of : . Nevertheless, it has a different motivation and intuitive interpretation there.
- The fragment of (subsuming ) embeds into by defining equivalently as .However, this does not generalize to for .Conversely, the operator cannot be expressed in terms of the operators , either.These nonexpressiveness claims can be proved by using the respective notions of bisimulations introduced for each of these operators in [25].
- is equivalent to the sequential version SF2 of the operator SF, mentioned in Section 7.1 as , where the coalitions and their goals are arranged in decreasing priority order.
- On the other hand, is essentially expressible, up to a natural transformation of the models and semantics, in the group strategic STIT (cf. [13,14]), as . This observation (suggested by a reviewer) leads to a new computationally well-behaved fragment of the group strategic STIT, which is known to be not only undecidable, but even nonaxiomatizable; cf. [14].
8.4. Axiomatic System for
- (Triv) , where is the trivial goal assignment, mapping each coalition to ⊤.
- (Safe)Even the grand coalition of all agents cannot ensure the falsum to become true.
- (Merge) ,where are pairwise disjoint.This axiom scheme generalizes the superadditivity axiom of coalition logic (cf. Section 4.4.) It is valid, because, if the coalitions are pairwise disjoint, then they can join together their collective strategies for their respective coalitional goals into one strategy profile that ensures satisfaction of all these collective goals.
- (GrandCoalition) , where .This axiom scheme is valid because any strategy profile for generates a unique successor state. If a state formula is true in it, then it can be added to the coalitional goal of , otherwise its negation can be added to it.
- (Case) , where .This scheme says that for any coalition C, state formula , and a strategy profile , either its projection to C ensures the truth of in all successor states enabled by —in which case can be added to the goal of C enforced by —or, otherwise, is true in some of these successor states, in which case it can be added to as the goal of the grand coalition enforced by .
- (Con) where and for some .Given any coalition C and subcoalition , this scheme says that the goal of can be added for free to the goal of C. Indeed, if there is any strategy profile that ensures that C and can force their respective goals, then also ensures that C can force the conjunction of these goals.
8.5. The Temporal Logic of Coalitional Goal Assignments
8.6. An Aside: Equilibria and Co-Equilibria
8.7. An Example
- c is the atomic proposition “all animals have crossed the river”.
- e is the atomic proposition “some sheep are eaten”.
9. Basic Strategy Logic: A Unifying Formalism for Strategic Reasoning
- , for iff(assuming that truth of the goal formulae in on plays has already been defined).
- iff for some strategy for .
- /where ; likewise, for .
- ()
- Note that the joint strategy for assigned to is supposed to ensure, together with the joint strategy for assigned to , the truth of the (translation of the) goal formula whenever the joint strategy for assigned to ensures the truth of the (translation of the) goal formula against any joint strategy of the agents in , including those in .
- ()
- Note the difference with the previous translation, reflecting the difference between the semantics of () and (): the joint strategy for now depends on the joint strategy for , and the strategies of the agents in may not differ from those already fixed in the latter.
- ()
- This formula captures the semantics of in a straightforward way.
- (SF)
- Likewise, the formula above formalizes precisely the semantic definition of SF.
- (SF1)
- This formula says that C has a collective strategy (in particular, a collective action) assigned to that guarantees (the translation of) , and is such that, when fixed,each has a collective action (already fixed for the agents in ) that guarantees (the translation of) against any behavior of the noncommitted agents, i.e., those in . This is precisely the semantics of SF1, defined in Section 7.1.
- (SF2)
- (for simplicity, assuming that are pairwise disjoint)This formula likewise expresses the semantics of the sequential version SF2 of SF1, defined in Section 7.1. To achieve this, every time it claims existence of a joint strategy of it assumes that the strategies of all agents in the already previously mentioned coalitions are already fixed, and that joint strategy must succeed against any behavior of the not-yet-committed agents only.
- Again, this formula captures the formal semantics of in a straightforward way.
10. Concluding Remarks: Outlook and Perspectives
- Adding agents’ knowledge in the semantics, and explicitly in the language, by assuming that the agents reason and act under imperfect information.
- Taking into account the normative aspects and constraints of the socially interactive context, including obligations, permission, and prohibitions, which socially responsible rational agents must respect in their strategic behavior.
- Analysis of the expressiveness and computational complexity of the basic strategy logic which should eventually determine whether and to what extent may be regarded as a viable alternative to the propositional modal approach behind the logical systems for strategic reasoning presented here.
- In particular, an interesting currently open question is whether there is a finite set of modal strategic operators with semantics that can be translated to which provide expressive completeness, if not for the full language of , then at least for natural and reasonably expressive fragments of it.
- Completeness results for some of the systems of axioms mentioned here, including the three main fragments of , the entire , and . Ultimately, a complete axiomatic system for , if possible, or for substantially rich fragments of it.
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Parikh, R. The logic of games and its applications. North-Holl. Math. Stud. 1985, 102, 111–139. [Google Scholar]
- Brown, M.A. On the Logic of Ability. J. Philos. Log. 1988, 17, 1–26. [Google Scholar] [CrossRef]
- Belnap, N.; Perloff, M. Seeing to it that: A canonical form for agentives. Theoria 1988, 54, 175–199. [Google Scholar] [CrossRef]
- Pauly, M. Logic for Social Software. Ph.D. Thesis, University of Amsterdam, Amsterdam, The Netherlands, 2001. [Google Scholar]
- Pauly, M. A Modal Logic for Coalitional Power in Games. J. Log. Comput. 2002, 12, 149–166. [Google Scholar] [CrossRef]
- Alur, R.; Henzinger, T.A.; Kupferman, O. Alternating-Time Temporal Logic. In Proceedings of the 38th IEEE Symposium on Foundations of Computer Science, Miami Beach, FL, USA, 19–22 October 1997; pp. 100–109. [Google Scholar]
- Alur, R.; Henzinger, T.A.; Kupferman, O. Alternating-Time Temporal Logic. J. ACM 2002, 49, 672–713. [Google Scholar] [CrossRef]
- Bulling, N.; Goranko, V.; Jamroga, W. Logics for Reasoning About Strategic Abilities in Multi-player Games. In Models of Strategic Reasoning: Logics, Games, and Communities; van Benthem, J., Ghosh, S., Verbrugge, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; pp. 93–136. [Google Scholar]
- Ågotnes, T.; Goranko, V.; Jamroga, W.; Wooldridge, M. Knowledge and Ability. In Handbook of Epistemic Logic; van Ditmarsch, H., Halpern, J., van der Hoek, W., Kooi, B., Eds.; College Publications: London, UK, 2015; pp. 543–589. [Google Scholar]
- Bratman, M. Intentions, Plans, and Practical Reason; Harvard University Press: Cambridge, MA, USA, 1987. [Google Scholar]
- Rao, A.S.; Georgeff, M.P. Modeling Rational Agents within a BDI-Architecture. In Proceedings of the 2nd International Conference on Principles of Knowledge Representation and Reasoning (KR’91), Cambridge, MA, USA, 22–25 April 1991; Allen, J.F., Fikes, R., Sandewall, E., Eds.; Morgan Kaufmann: Burlington, MA, USA, 1991; pp. 473–484. [Google Scholar]
- Cohen, P.R.; Levesque, H.J. Intention is Choice with Commitment. Artif. Intell. 1990, 42, 213–261. [Google Scholar] [CrossRef]
- Broersen, J.M. A stit-Logic for Extensive Form Group Strategies. In Proceedings of the 2009 IEEE/WIC/ACM International Conference on Web Intelligence and International Conference on Intelligent Agent Technology—Workshops, Milan, Italy, 15–18 September 2009; IEEE Computer Society: Washington, DC, USA, 2009; pp. 484–487. [Google Scholar] [CrossRef]
- Broersen, J.M.; Herzig, A. Using STIT Theory to Talk About Strategies. In Models of Strategic Reasoning—Logics, Games, and Communities; Lecture Notes in Computer Science; van Benthem, J., Ghosh, S., Verbrugge, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; Volume 8972, pp. 137–173. [Google Scholar] [CrossRef]
- Lorini, E. Temporal STIT logic and its application to normative reasoning. J. Appl. Non Class. Logics 2013, 23, 372–399. [Google Scholar] [CrossRef]
- Lorini, E.; Sartor, G. A STIT Logic for Reasoning About Social Influence. Stud. Log. 2016, 104, 773–812. [Google Scholar] [CrossRef]
- Boudou, J.; Lorini, E. Concurrent Game Structures for Temporal STIT Logic. In Proceedings of the 17th International Conference on Autonomous Agents and MultiAgent Systems, AAMAS 2018, Stockholm, Sweden, 10–15 July 2018; André, E., Koenig, S., Dastani, M., Sukthankar, G., Eds.; International Foundation for Autonomous Agents and Multiagent Systems: Richland, SC, USA, 2018; pp. 381–389. [Google Scholar]
- Ramanujam, R.; Simon, S. Dynamic Logic on Games with Structured Strategies. In Proceedings of the Eleventh International Conference on Principles of Knowledge Representation and Reasoning, Sydney, Australia, 16–19 September 2008; AAAI Press: Palo Alto, CA, USA, 2008; pp. 49–58. [Google Scholar]
- van Benthem, J.; Ghosh, S.; Liu, F. Modelling simultaneous games in dynamic logic. Synthese 2008, 165, 247–268. [Google Scholar] [CrossRef] [Green Version]
- van Benthem, J.; Klein, D. Logics for Analyzing Games. In The Stanford Encyclopedia of Philosophy, Summer 2020 ed.; Zalta, E.N., Ed.; Metaphysics Research Lab, Stanford University: Stanford, CA, USA, 2020. [Google Scholar]
- Chatterjee, K.; Henzinger, T.A.; Piterman, N. Strategy logic. Inf. Comput. 2010, 208, 677–693. [Google Scholar] [CrossRef]
- Mogavero, F.; Murano, A.; Vardi, M.Y. Reasoning About Strategies. In Proceedings of the FSTTCS 2010; Schloss Dagstuhl—Leibniz-Zentrum fuer Informatik (LIPIcs): Wadern, Germany, 2010; Volume 8, pp. 133–144. [Google Scholar]
- Mogavero, F.; Murano, A.; Perelli, G.; Vardi, M.Y. Reasoning About Strategies: On the Model-Checking Problem. ACM Trans. Comput. Log. 2014, 15, 34:1–34:47. [Google Scholar] [CrossRef]
- Mogavero, F.; Murano, A.; Perelli, G.; Vardi, M.Y. Reasoning about Strategies: On the Satisfiability Problem. Log. Methods Comput. Sci. 2017, 13. [Google Scholar]
- Goranko, V.; Enqvist, S. Socially Friendly and Group Protecting Coalition Logics. In Proceedings of the International Conference on Autonomous Agents and Multiagent Systems AAMAS 2018, Stockholm, Sweden, 10–15 July 2018; International Foundation for Autonomous Agents and Multiagent Systems: Richland, SC, USA, 2018; pp. 372–380. [Google Scholar]
- Enqvist, S.; Goranko, V. The temporal logic of coalitional goal assignments in concurrent multi-player games. ACM Trans. Comput. Log. 2022, 23, 1–58. [Google Scholar] [CrossRef]
- Goranko, V.; Ju, F. Towards a Logic for Conditional Local Strategic Reasoning. Lecture Notes in Computer Science. In Proceedings of the 7th International Workshop LORI 2019, Chongqing, China, 18–21 October 2019; Blackburn, P., Lorini, E., Guo, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11813, pp. 112–125. [Google Scholar]
- Goranko, V.; Ju, F. A Logic for Conditional Local Strategic Reasoning. J. Log. Lang. Inf. 2022, 31, 167–188. [Google Scholar] [CrossRef]
- Naumov, P.; Yuan, Y. Intelligence in Strategic Games. J. Artif. Intell. Res. 2021, 71, 521–556. [Google Scholar] [CrossRef]
- Naumov, P.; Yew, R. Ethical Dilemmas in Strategic Games. In Proceedings of the Thirty-Fifth AAAI Conference on Artificial Intelligence, AAAI 2021, Virtual, 2–9 February 2021; AAAI Press: Palo Alto, CA, USA, 2021; pp. 11613–11621. [Google Scholar]
- Naumov, P.; Tao, J. Two Forms of Responsibility in Strategic Games. In Proceedings of the Thirtieth International Joint Conference on Artificial Intelligence, IJCAI 2021, Virtual Event, Montreal, QC, Canada, 19–27 August 2021; Zhou, Z., Ed.; pp. 1989–1995. [Google Scholar] [CrossRef]
- Naumov, P.; Tao, J. Blameworthiness in Security Games. In Proceedings of the Thirty-Fourth AAAI Conference on Artificial Intelligence, AAAI 2020, New York, NY, USA, 7–12 February 2020; AAAI Press: Palo Alto, CA, USA, 2020; pp. 2934–2941. [Google Scholar] [CrossRef]
- van der Hoek, W.; Wooldridge, M. Cooperation, knowledge, and time: Alternating-time temporal epistemic logic and its applications. Stud. Log. 2004, 75, 125–157. [Google Scholar] [CrossRef]
- van Benthem, J.; Ghosh, S.; Verbrugge, R. (Eds.) Models of Strategic Reasoning—Logics, Games, and Communities; LNCS Volume 8972; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Blackburn, P.; de Rijke, M.; Venema, Y. Modal Logic; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Demri, S.; Goranko, V.; Lange, M. Temporal Logics in Computer Science; Cambridge Tracts in Theoretical Computer Science; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar]
- van der Hoek, W.; Pauly, M. Modal Logic for Games and Information. In Handbook of Modal Logic; Blackburn, P., van Benthem, J., Wolter, F., Eds.; Elsevier: Amsterdam, The Netherlands, 2006; pp. 1077–1148. [Google Scholar]
- Ågotnes, T.; Goranko, V.; Jamroga, W. Alternating-time Temporal Logics with Irrevocable Strategies. In Proceedings of the 11th Conference on Theoretical Aspects of Rationality and Knowledge, Brussels, Belgium, 25–27 June 2007; Samet, D., Ed.; pp. 15–24. [Google Scholar]
- Ågotnes, T.; Goranko, V.; Jamroga, W. Strategic Commitment and Release in Logics for Multi-Agent Systems (Extended Abstract); Technical Report IfI-08-01; Clausthal University of Technology: Clausthal-Zellerfeld, Germany, 2008. [Google Scholar]
- Laroussinie, F.; Markey, N.; Oreiby, G. On the Expressiveness and Complexity of ATL. Log. Methods Comput. Sci. 2008, 4. [Google Scholar] [CrossRef]
- Goranko, V. Coalition Games and Alternating Temporal Logics. In Proceedings of the 8th Conference on Theoretical Aspects of Rationality and Knowledge (TARK VIII), Siena, Italy, 8–10 July 2001; van Benthem, J., Ed.; Morgan Kaufmann: Burlington, MA, USA, 2001; pp. 259–272. [Google Scholar]
- Brihaye, T.; Lopes, A.D.C.; Laroussinie, F.; Markey, N. ATL with Strategy Contexts and Bounded Memory. In Proceedings of the Logical Foundations of Computer Science: International Symposium, LFCS 2009, Deerfield Beach, FL, USA, 3–6 January 2009; Nerode, A., Ed.; Springer: Berlin/Heidelberg, Germany, 2009; LNCS Volume 5407, pp. 92–106. [Google Scholar]
- Walther, D.; van der Hoek, W.; Wooldridge, M. Alternating-time Temporal Logic with Explicit Strategies. In Proceedings of the 11th Conference on Theoretical Aspects of Rationality and Knowledge TARK XI, Brussels, Belgium, 25–27 June 2007; Samet, D., Ed.; Presses Universitaires de Louvain: Louvain, Belgium, 2007; pp. 269–278. [Google Scholar]
- Abdou, J.; Keiding, H. Effectivity Functions in Social Choice; Springer: Berlin/Heidelberg, Germany, 1991. [Google Scholar]
- van Benthem, J.; Bezhanishvili, N.; Enqvist, S.; Yu, J. Instantial Neighbourhood Logic. Rev. Symb. Log. 2017, 10, 116–144. [Google Scholar] [CrossRef] [Green Version]
- Blackburn, P.; van Benthem, J.; Wolter, F. (Eds.) Handbook of Modal Logic; Studies in Logic and Practical Reasoning; North-Holland: Amsterdam, The Netherlands, 2007; Volume 3. [Google Scholar]
- Goranko, V.; Shkatov, D. Tableau-based decision procedures for logics of strategic ability in multiagent systems. ACM Trans. Comput. Log. 2009, 11, 1–49. [Google Scholar] [CrossRef]
- Cerrito, S.; David, A.; Goranko, V. Optimal Tableau Method for Constructive Satisfiability Testing and Model Synthesis in the Alternating-Time Temporal Logic ATL+. ACM Trans. Comput. Log. 2015, 17, 4:1–4:34. [Google Scholar] [CrossRef] [Green Version]
| 1 | These remarks are prompted by an exchange and apparent disagreement with an anonymous reviewer of this paper, who argues that the logical frameworks discussed here do not really deal with goals, rationality, or sociality. In my understanding, the core of that disagreement is in the essentially different perspectives which we apparently have on the topic and on some basic concepts in this paper, as explained further in the text. |

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Goranko, V. Logics for Strategic Reasoning of Socially Interacting Rational Agents: An Overview and Perspectives. Logics 2023, 1, 4-35. https://doi.org/10.3390/logics1010003
Goranko V. Logics for Strategic Reasoning of Socially Interacting Rational Agents: An Overview and Perspectives. Logics. 2023; 1(1):4-35. https://doi.org/10.3390/logics1010003
Chicago/Turabian StyleGoranko, Valentin. 2023. "Logics for Strategic Reasoning of Socially Interacting Rational Agents: An Overview and Perspectives" Logics 1, no. 1: 4-35. https://doi.org/10.3390/logics1010003
APA StyleGoranko, V. (2023). Logics for Strategic Reasoning of Socially Interacting Rational Agents: An Overview and Perspectives. Logics, 1(1), 4-35. https://doi.org/10.3390/logics1010003