
Unscented Kalman Filter Empowered by Bayesian Model Evidence for System Identification in Structural Dynamics †

 ,
,  , ,
, ,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methodology
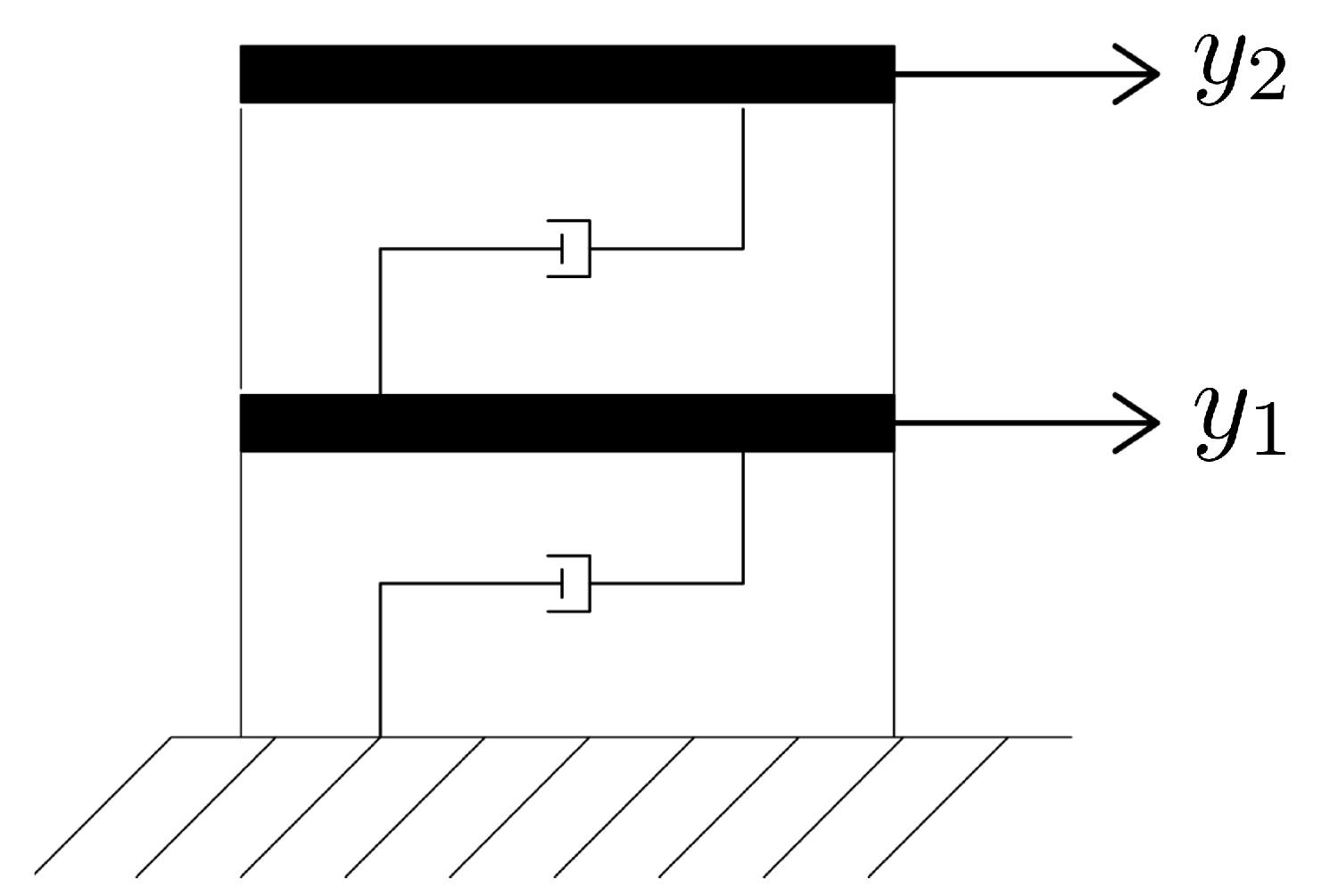
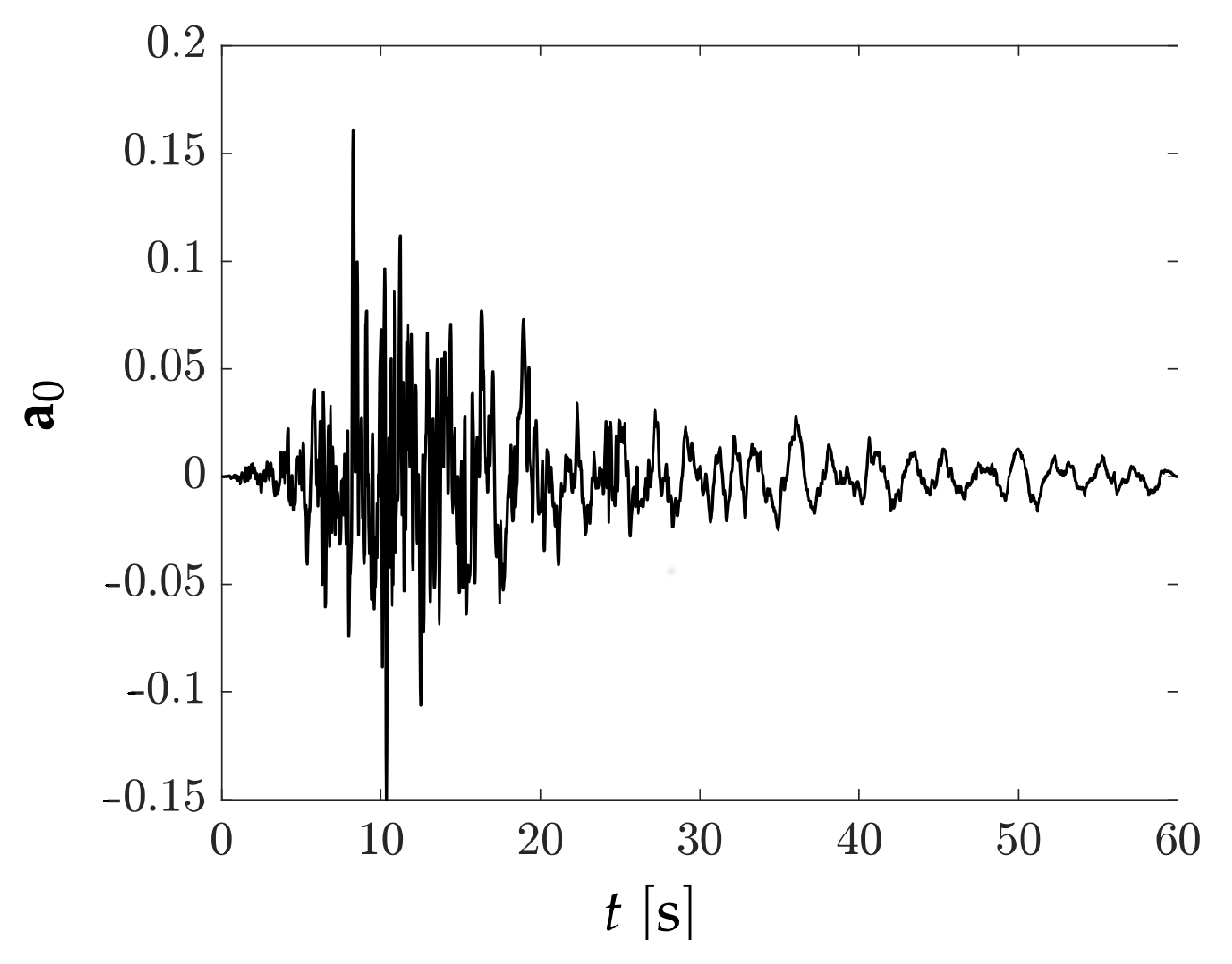
2.1. Elasto-Dynamic Problem
2.2. Unscented Kalman Filter for Parameter Estimation
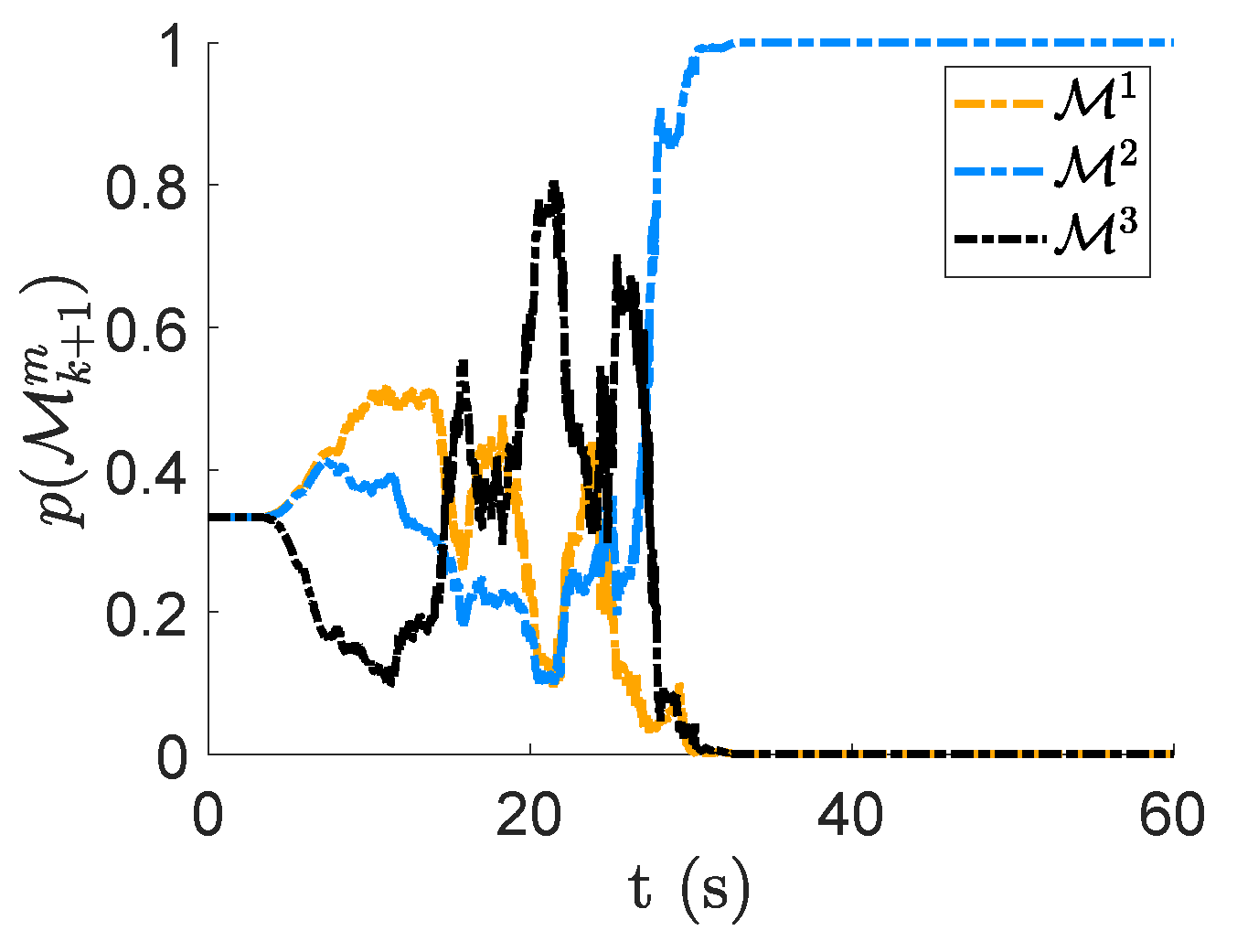
2.3. Model Evidence Computation for Unscented Kalman Filter
| Algorithm 1 UKF for parameter estimation, linear elastic case. |
|
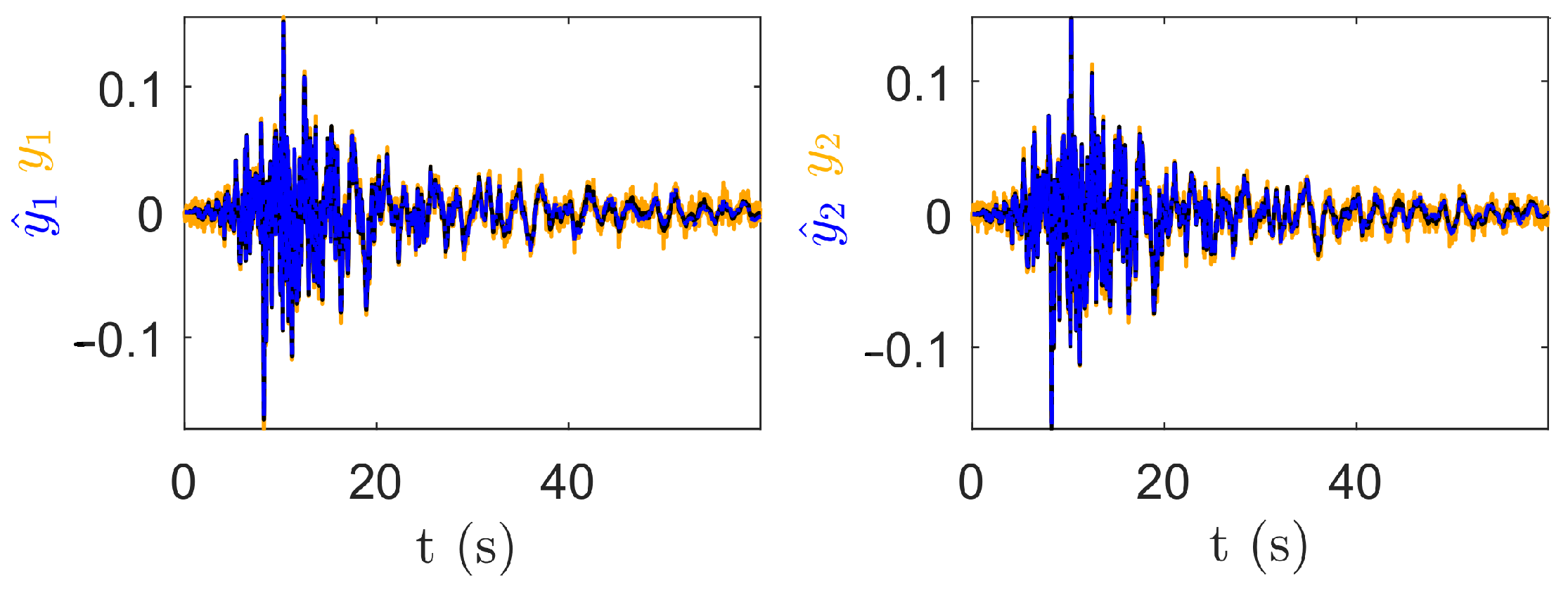
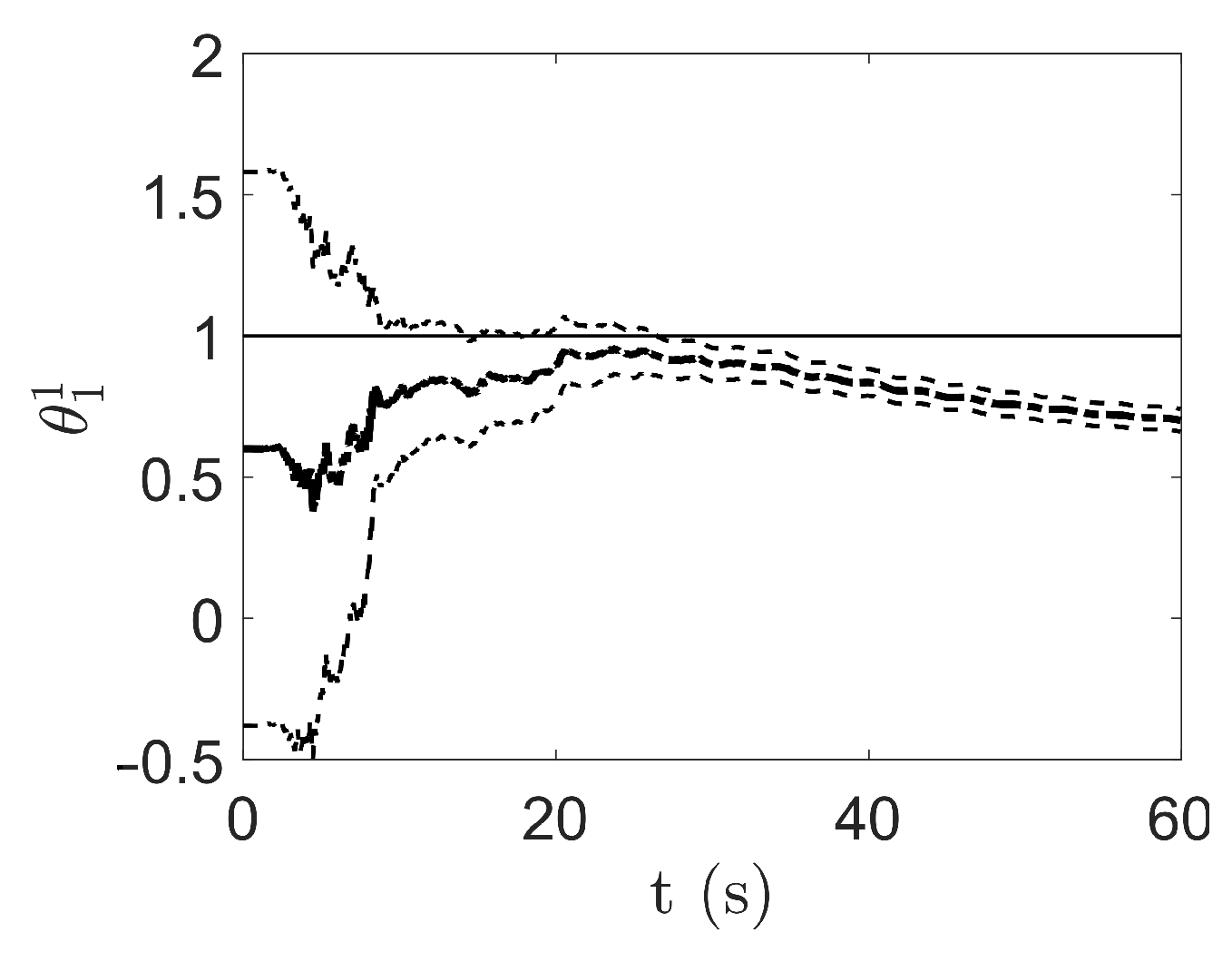
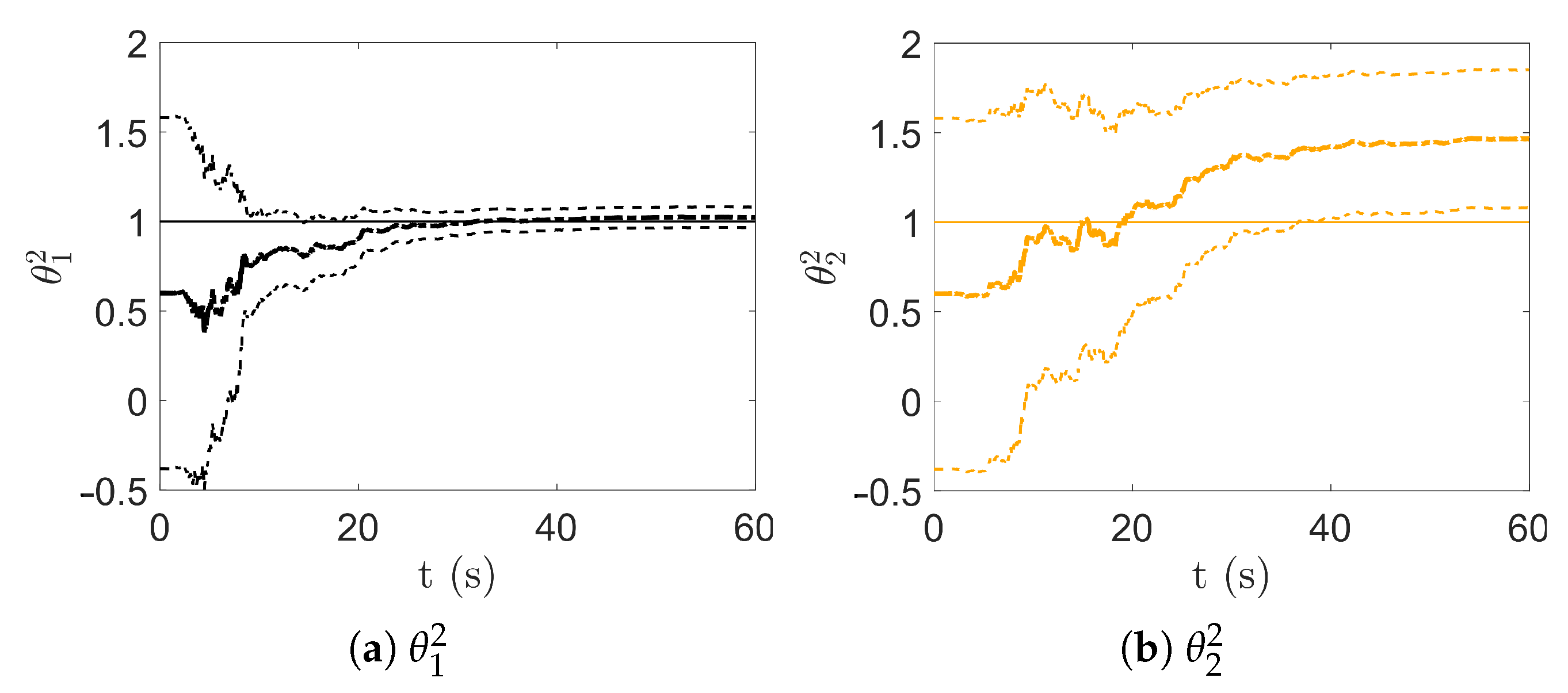
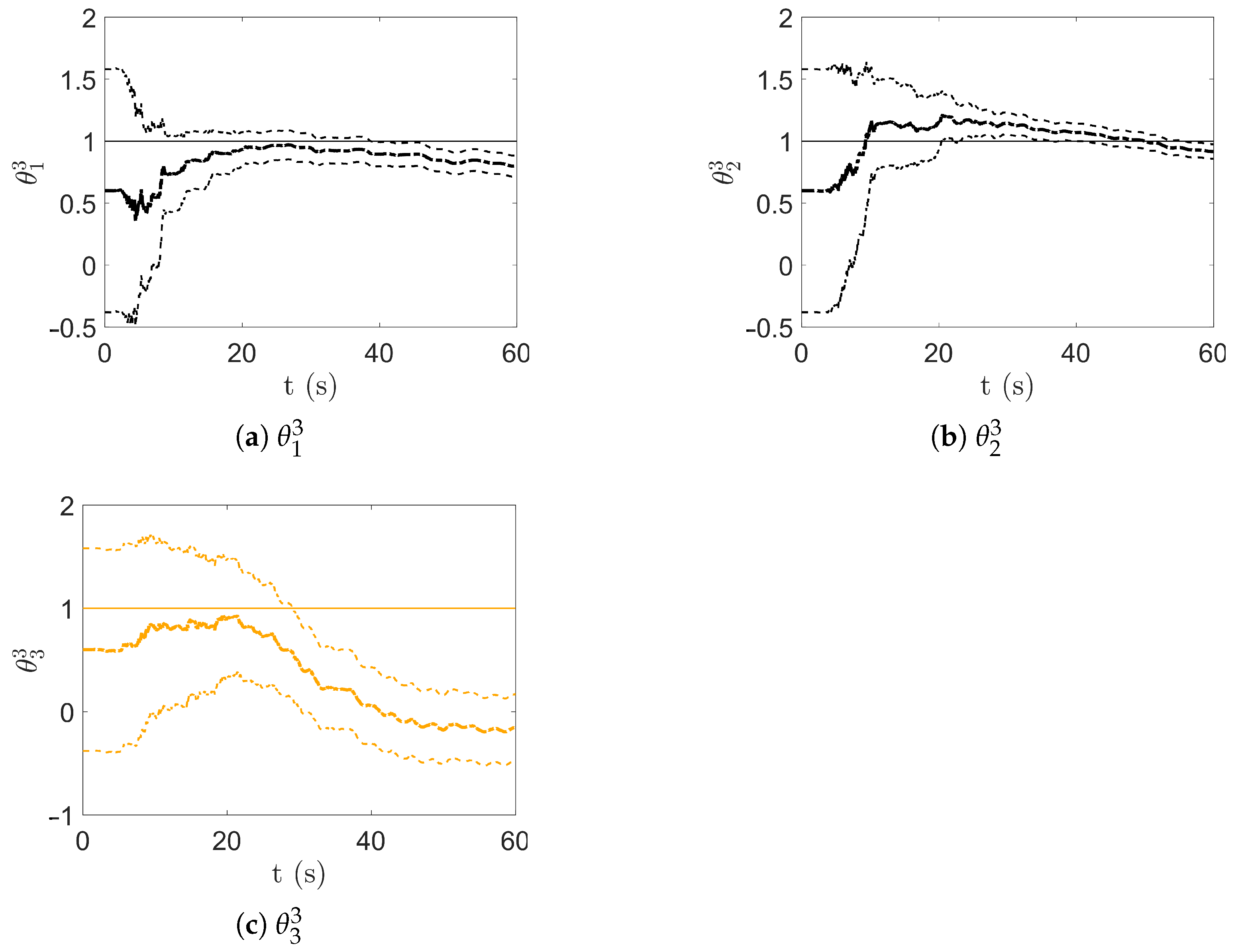
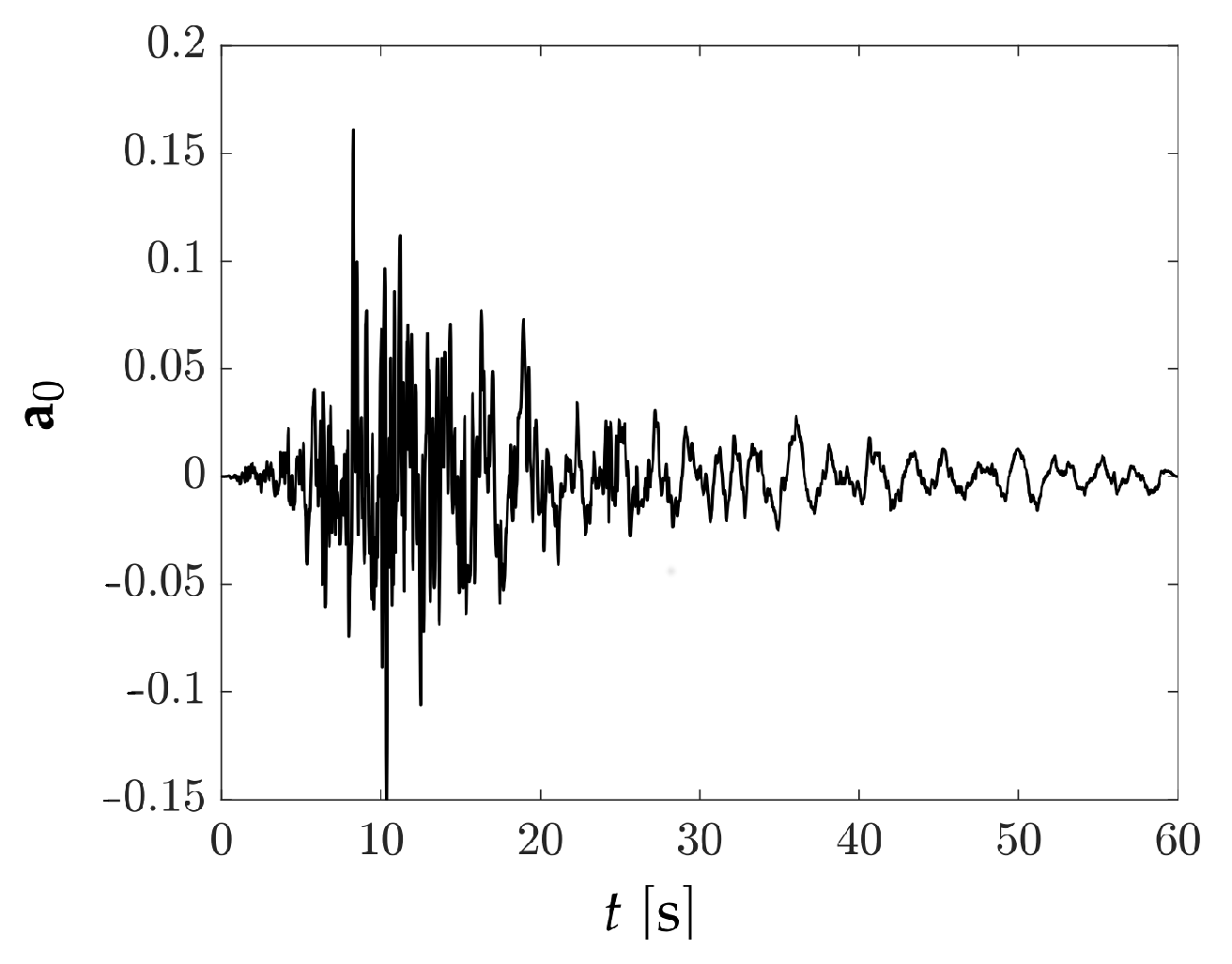
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mariani, S.; Ghisi, A. Unscented Kalman filtering for nonlinear structural dynamics. Nonlinear Dyn. 2007, 49, 131–150. [Google Scholar] [CrossRef]
- Yuen, K.V.; Mu, H.Q. Real-time system identification: an algorithm for simultaneous model class selection and parametric identification. Comput.-Aided Civ. Infrastruct. Eng. 2015, 30, 785–801. [Google Scholar] [CrossRef]
- Hilber, H.M.; Hughes, T.J.R.; Taylor, R.L. Improved numerical dissipation for time integration algorithms in structural dynamics. Earthq. Eng. Struct. Dyn. 1977, 5, 283–292. [Google Scholar] [CrossRef] [Green Version]
- Mariani, S.; Corigliano, A. Impact induced composite delamination: state and parameter identification via joint and dual extended Kalman filters. Comput. Methods Appl. Mech. Eng. 2005, 194, 5242–5272. [Google Scholar] [CrossRef]
- Eftekhar Azam, S.; Mariani, S.; Attari, N.K.A. Online damage detection via a synergy of proper orthogonal decomposition and recursive Bayesian filters. Nonlinear Dyn. 2017, 89, 1489–1511. [Google Scholar] [CrossRef]
- Eftekhar Azam, S.; Mariani, S. Online damage detection in structural systems via dynamic inverse analysis: A recursive Bayesian approach. Eng. Struct. 2018, 159, 28–45. [Google Scholar] [CrossRef]
- Gobat, G.; Azam, S.E.; Mariani, S. SHM and efficient strategies for reduced-order modeling. Eng. Proc. 2020, 2, 2098. [Google Scholar] [CrossRef]
- Kopp, R.E.; Orforf, R.J. Linear regression applied to system identification for adaptive control systems. AIAA J. 1963, 1, 2300–2306. [Google Scholar] [CrossRef]
- Wan, E.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No.00EX373), Lake Louise, AL, Canada, 1–4 October 2000; pp. 153–158. [Google Scholar] [CrossRef]
- Julier, S. The scaled unscented transformation. In Proceedings of the 2002 American Control Conference (IEEE Cat. No.CH37301), Anchorage, AK, USA, 8–10 May 2002; Volume 6, pp. 4555–4559. [Google Scholar] [CrossRef] [Green Version]
- Castiglione, J.; Astroza, R.; Eftekhar Azam, S.; Linzell, D. Auto-regressive model based input and parameter estimation for nonlinear finite element models. Mech. Syst. Signal Process. 2020, 143, 106779. [Google Scholar] [CrossRef]
- D’Alessandro, A.; Vitale, G.; Scudero, S.; D’Anna, R.; Costanza, A.; Fagiolini, A.; Greco, L. Characterization of MEMS accelerometer self-noise by means of PSD and Allan Variance analysis. In Proceedings of the 7th IEEE International Workshop on Advances in Sensors and Interfaces IWASI, Vieste, Italy, 15–17 June 2017; pp. 159–164. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rosafalco, L.; Eftekhar Azam, S.; Manzoni, A.; Corigliano, A.; Mariani, S. Unscented Kalman Filter Empowered by Bayesian Model Evidence for System Identification in Structural Dynamics. Comput. Sci. Math. Forum 2022, 2, 3. https://doi.org/10.3390/IOCA2021-10896
Rosafalco L, Eftekhar Azam S, Manzoni A, Corigliano A, Mariani S. Unscented Kalman Filter Empowered by Bayesian Model Evidence for System Identification in Structural Dynamics. Computer Sciences & Mathematics Forum. 2022; 2(1):3. https://doi.org/10.3390/IOCA2021-10896
Chicago/Turabian StyleRosafalco, Luca, Saeed Eftekhar Azam, Andrea Manzoni, Alberto Corigliano, and Stefano Mariani. 2022. "Unscented Kalman Filter Empowered by Bayesian Model Evidence for System Identification in Structural Dynamics" Computer Sciences & Mathematics Forum 2, no. 1: 3. https://doi.org/10.3390/IOCA2021-10896
APA StyleRosafalco, L., Eftekhar Azam, S., Manzoni, A., Corigliano, A., & Mariani, S. (2022). Unscented Kalman Filter Empowered by Bayesian Model Evidence for System Identification in Structural Dynamics. Computer Sciences & Mathematics Forum, 2(1), 3. https://doi.org/10.3390/IOCA2021-10896