The equivalent static wind load (ESWL) is based on the wind-induced peak response. For the structures coupling with inerter-based vibration absorbers (IVAs), the wind-induced responses are controlled. Moreover, the control performance of the IVA is highly dependent on the tuning parameters. Therefore, it is the basic task to establish the equations of motion, and determine the optimal parameters and performances of IVA. In this section, a variety of IVAs are formulated generically. The optimal parameters are analytically obtained with the Fixed-point approach.
2.1. Generic Equations of Motion
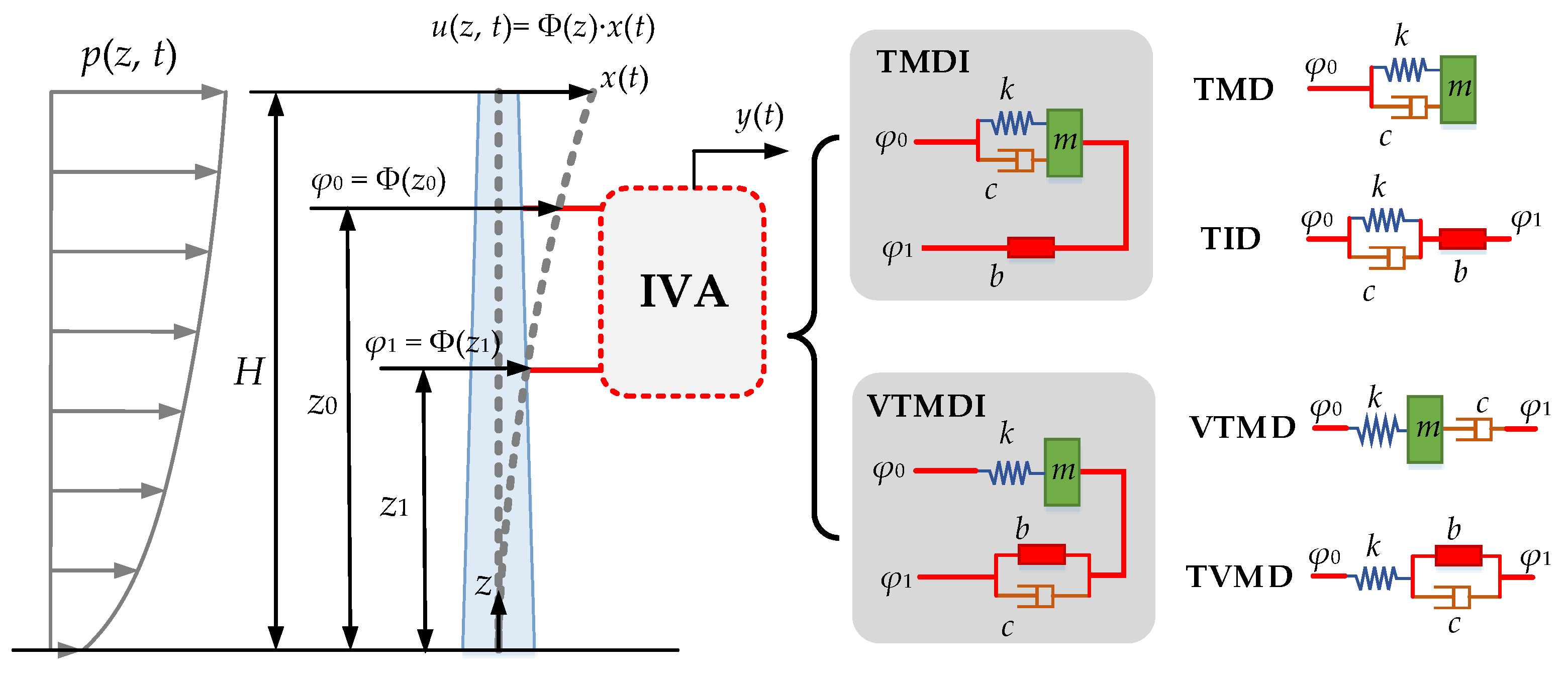
In order to simplify the derivation, the primary structure is assumed to be a generalized single-degree-of-freedom (SDOF) structure. Assuming that the fundamental mode dominates a slender structure as an example, the equation of motion is described with the generalized mass, stiffness, and damping, denoted as
M,
K, and
C, respectively. It is dynamically characterized by the natural circular frequency
, and damping ratio
. As shown in
Figure 1, the displacement response time–history
u(
z,
t) can be decoupled as a spatial variant normalized modal function Φ(
z), with respect to the generalized coordinate (height)
z (0 ≤
z ≤
H, Φ(
H) = 1), and a time dependent generalized displacement response
x(
t), i.e.,
u(
z,
t) = Φ(
z)·
x(
t). Note that
x(
t) is exactly equalled to the top displacement,
x(
t) =
u(
H,
t).
For an uncontrolled primary structure subjected to wind load
p(
z,
t), the vibration is governed by Equation (1). In the equation,
is the generalized wind load. The wind load is composed of static and dynamic components, statistically denoted by the mean value
and standard deviation value
. The normalized transfer function
H(
s) based on the Laplace transform of Equation (1) is written as Equation (2), with
s being the complex frequency, and
X(
s) and
F(
s) being the Laplace transform of the output response
x(
t) and the input excitation
F(
t), respectively. When
s takes the pure imaginary frequency i
ω,
H(i
ω) is the normalized frequency response function.
V(
s) =
is the inverse of
H(
s). Here,
is an imaginary unit. Consequently, the static and dynamic wind-induced responses, denoted by the mean and standard deviation values,
and
, are shown in Equation (3). The peak response
is obtained from the peak factor approach, as shown in Equation (3). According to Davenport’s statistical approach [
1], the peak factor
g is approximated with
, where
T is the time duration,
n0 is the mean up-crossing rate that can be approximated by
, and
γ is the Euler constant taken as 0.5772.
In this paper, two major configurations of IVAs, TMDI, and VTMDI are considered, as shown in
Figure 1. It is also noted that TMD and TID can be expressed as TMDI with an absent of mass. Likewise, VTMD and TVMD can be VTMDI with an absent of mass. Therefore, these configurations are the major IVAs with similar components and different configurations. They can be formulated and modeled generically. Although the IVAs are discussed in several papers [
37,
38,
39], the ESWL of structures with these IVAs is not fully addressed.
For a primary structure controlled by an IVA installed between coordinates
z0 and
z1, as shown in
Figure 1, the Ritz-Galerkin method is adopted, as referred to [
29,
39,
43,
44], assuming that
u(
z,
t) = Φ(
z)·
x(
t). According to the principle of visual work, the equations of motion are rewritten as Equation (4). In the equation,
and
are the location parameters of the IVA.
f0 and
f1 are the control force generated by the IVA at installation locations
z0 and
z1, respectively.
y represents the absolute displacement of the IVA.
Considering a Tuned Mass Damper Inerter (TMDI) with mass
m, stiffness
k, damping
c, and inertance coefficients
b as an example,
f0 and
f1 are written in Equation (5). Note that when
b = 0, it become a Tuned Mass Damper (TMD). Whereas, when the mass can be ignored (
m = 0), it has a similar configuration with a Tuned Inerter Damper (TID). Thus, Equation (5) is applicable for all of the above-mentioned situations. If the dashpot of the TMDI is connected to the inerter side, a variant design of TMDI is formed, namely VTMDI. In this case,
f0 and
f1 are expressed as Equation (6). When the inerter is absent, it forms a variant design of TMD (VTMD). When the mass becomes absent, it has a similar configuration with the Tuned Viscous Mass Damper (TVMD [
21]), which is also denoted as TID2 in [
37]. Equation (6) is applicable for these variants. Also note that, when
φ1 = 0, the IVAs are connected to the ground, known as grounded IVAs. Conventional IVAs usually takes
φ0 = 1 and
φ1 = 0 regardless of the installation locations. They are assumed to be connected between the tip of the building and the ground.
Substituting Equation (5) or Equation (6) into Equation (4), we can obtain the normalized transfer function
H(
s).
H(
s) can be formatted as a rational expression, as Equation (7). The denominator polynomial
is quartic, with dimensionless coefficients
γj (
j = 0, 1, 2, 3, 4). The numerator polynomial
is quadratic, with dimensionless coefficients
θj (
j = 0, 1, 2).
In order to express the equations in a dimensionless form, the tuning parameters of the IVA are defined, as shown in
Table 1.
For TMDI and VTMDI, the coefficients are expressed, as shown in
Table 2. Consequently, the controlled wind-induced responses can be calculated by Equation (3), merely adopting the normalized transfer function
H(
s) as Equation (7).
2.2. Analytical Optimal Design Based on Fixed-Point Approach
The next step is to determine the appropriate parameters of the IVA. Basically, the optimal design is to determine the optimal tuning parameters {νopt, ζdopt} with respect to the input parameters {μ, β, φ0, φ1}. The optimization can be performed based on different performance targets, e.g., the maximum (infinity norm) or 2nd norm of the dynamic amplification function (H∞, H2 optimization). Among them, the most basic optimal design method is the Fixed-point approach (FPA), which can lead to analytical results.
According to Den Hartog [
18], the dynamic amplification function (DAF)
D(
λ) is defined as the modulus of
H(i
ω), particularly ignoring
ζn, as shown in Equation (8), where
λ =
ω/ωn is the normalized frequency. The polynomials
A1(
λ),
A2(
λ),
B1(
λ), and
B2(
λ) are determined by substituting Equation (7) into Equation (8), as shown in Equation (9). In the Equation,
,
,
,
. For TMDI and VTMDI, the coefficients are shown in
Table 2.
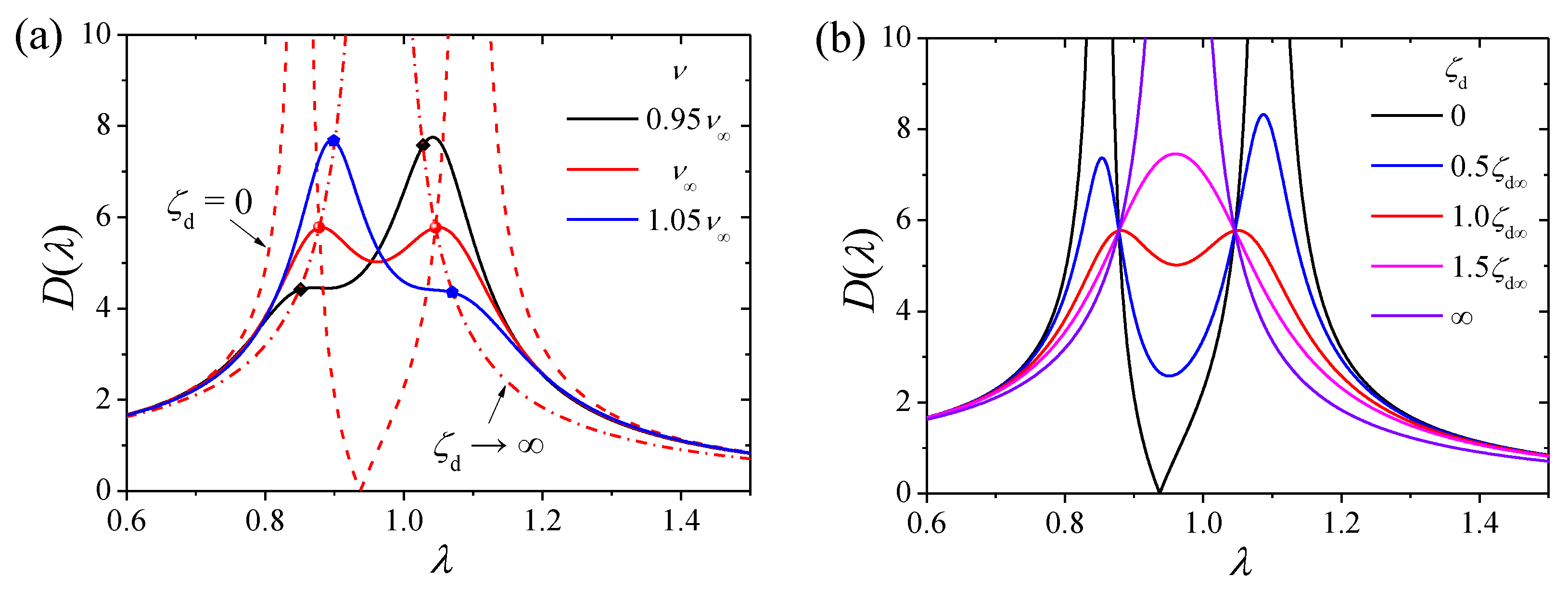
Based on the FPA, for a determined tuning frequency ratio
ν,
D(
λ) always passes through two fixed points, as shown in
Figure 2a. The horizontal coordinates of the fixed points
λ1,2 can be solved by letting
ζd be 0 and infinity, i.e.,
. At the optimal tuning frequency ratio
ν∞, the DAF values of the two fixed points are equal, i.e.,
D(
λ1) =
D(
λ2) =
Dopt. Consequently, we obtain the following equation:
By substituting Equation (9) into Equation (10),
ν∞ can be obtained by solving Equation (11) analytically. The coordinates of the optimal fixed points (
λ1, 2,
Dopt) are given by Equation (12).
According to FPA, the optimal tuning damping ratio
ζd∞ can be determined by assigning the fixed points to the peaks of the DAF, i.e.,
, as shown in
Figure 2b. Based on the quotient rule of derivation, the following equation may be obtained:
Thus, the optimal tuning damping ratio
ζd∞1,2, corresponding to the fixed points at
λ1 and
λ2, are given by Equation (14).
Considering the two fixed points, the optimal tuning damping ratio
ζd∞ is taken as
. Substituting Equations (9) and (12) into Equation (14),
ζd∞ is analytically obtained, as shown in Equation (15).
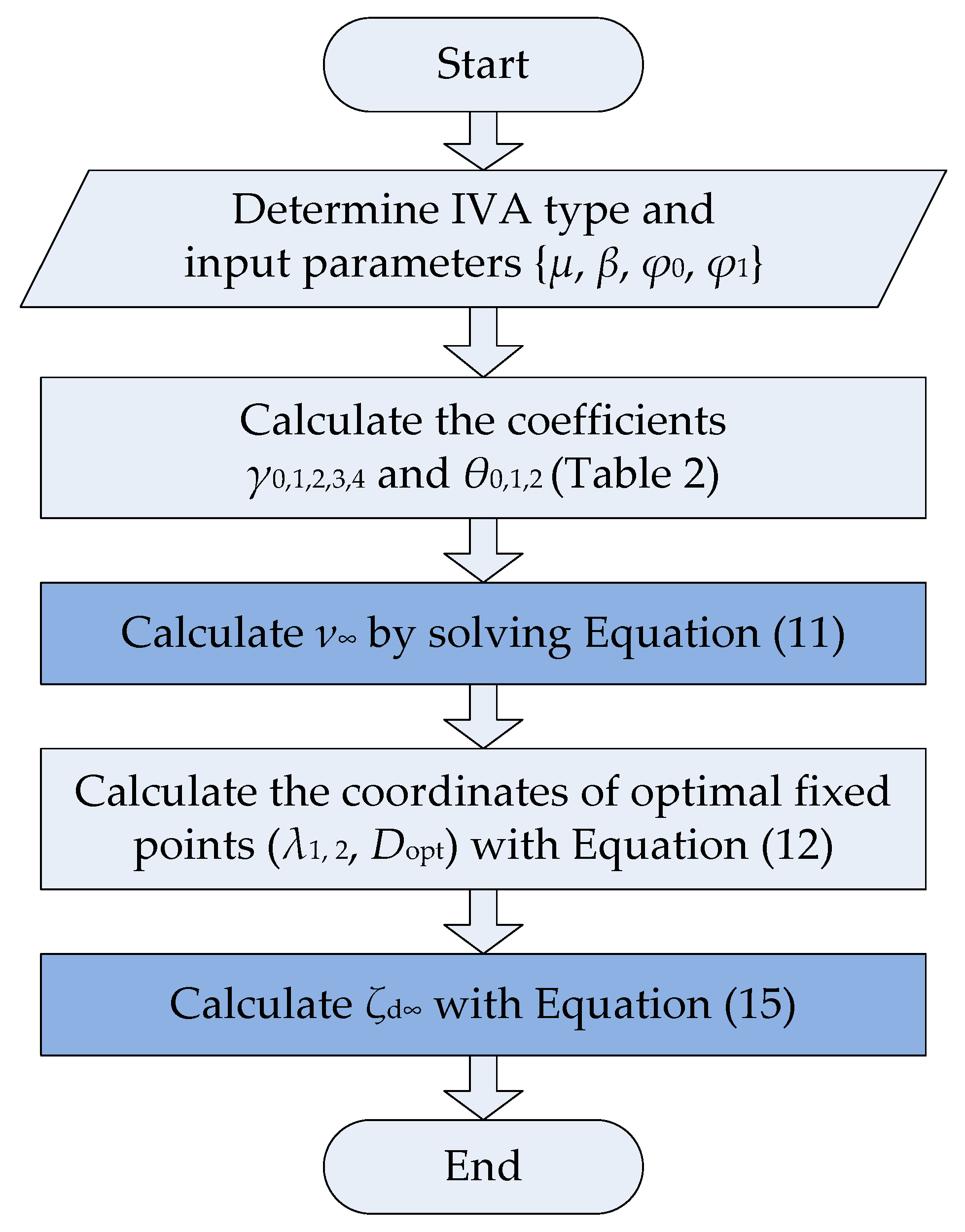
The flow chart for determining the analytical optimal parameters via FPA is summarized in
Figure 3. Based on the procedure, the analytical solutions to the optimal parameters {
ν∞,
ζd∞} for various IVAs are obtained, as shown in
Table 3. As the solution of a general VTMDI is complex, it is given in
Appendix A.
It is noted that there are many optimization goals of the DVAs, such as the
H∞ optimization, which aims at minimizing the maximum of the DAF. The
H2 optimization is targeted for minimizing the frequency domain integration, which corresponds to the variance of the response based on the stochastic vibration theory. In the presented paper, we adopted the FPA for an
H∞ optimal solution considering the two reasons. Firstly, the optimal results of the
H∞ and
H2 optimization are similar for stationary stochastic vibration responses according to previous studies [
29,
39]. Secondly, based on the fixed-point approach, the closed form solution can be derived, providing a feasible formula for practical design.
Notice that, in the proposed analytical derivation with FPA, the results for the optimal parameters (ν∞ and ζd∞) of Equations (11), (12) and (15) are only based on the coefficients of the transfer function. No extra assumption is introduced. Therefore, the derivation can be applied for DVAs that follows a transfer function with a quadratic numerator polynomial and a quartic denominator polynomial. A linear DVA with a single DOF usually follows this characteristic. The abovementioned equations can be applied to such DVAs other than the IVAs investigated in this paper.
It is indicated that when
μφ1 = 0 (i.e., absent mass
μ = 0 or grounded IVA
φ1 = 0), the optimal parameters of the TMDI (or VTMDI) can be formulated with an equivalent mass ratio
μeq compared to the corresponding conventional TMD (or VTMD). The equivalent mass ratio
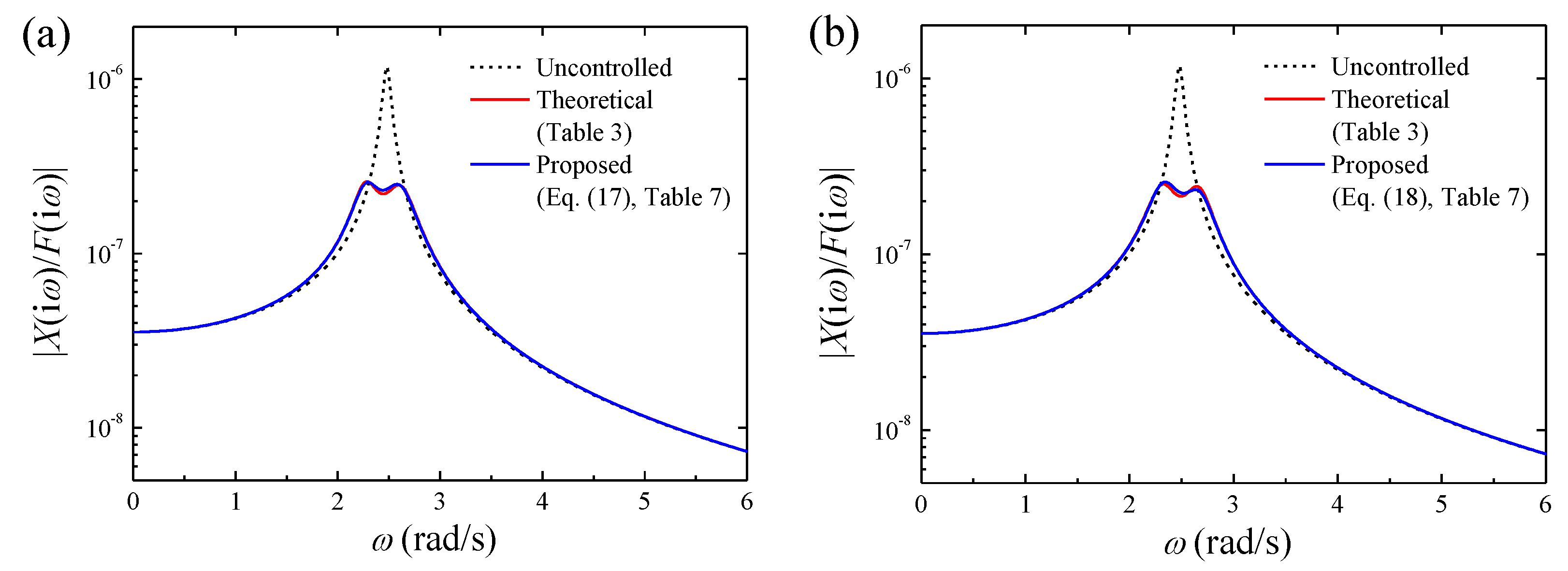
μeq is formulated in Equation (16), revealing the influence of installation locations. This equivalent mass ratio approach can be extended to IVAs for approximating the optimal parameters neglecting the higher order items, as displayed in Equations (17) and (18).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}