
Calibration Strategy for the JUNO Experiment †


Abstract
1. JUNO Detector Design
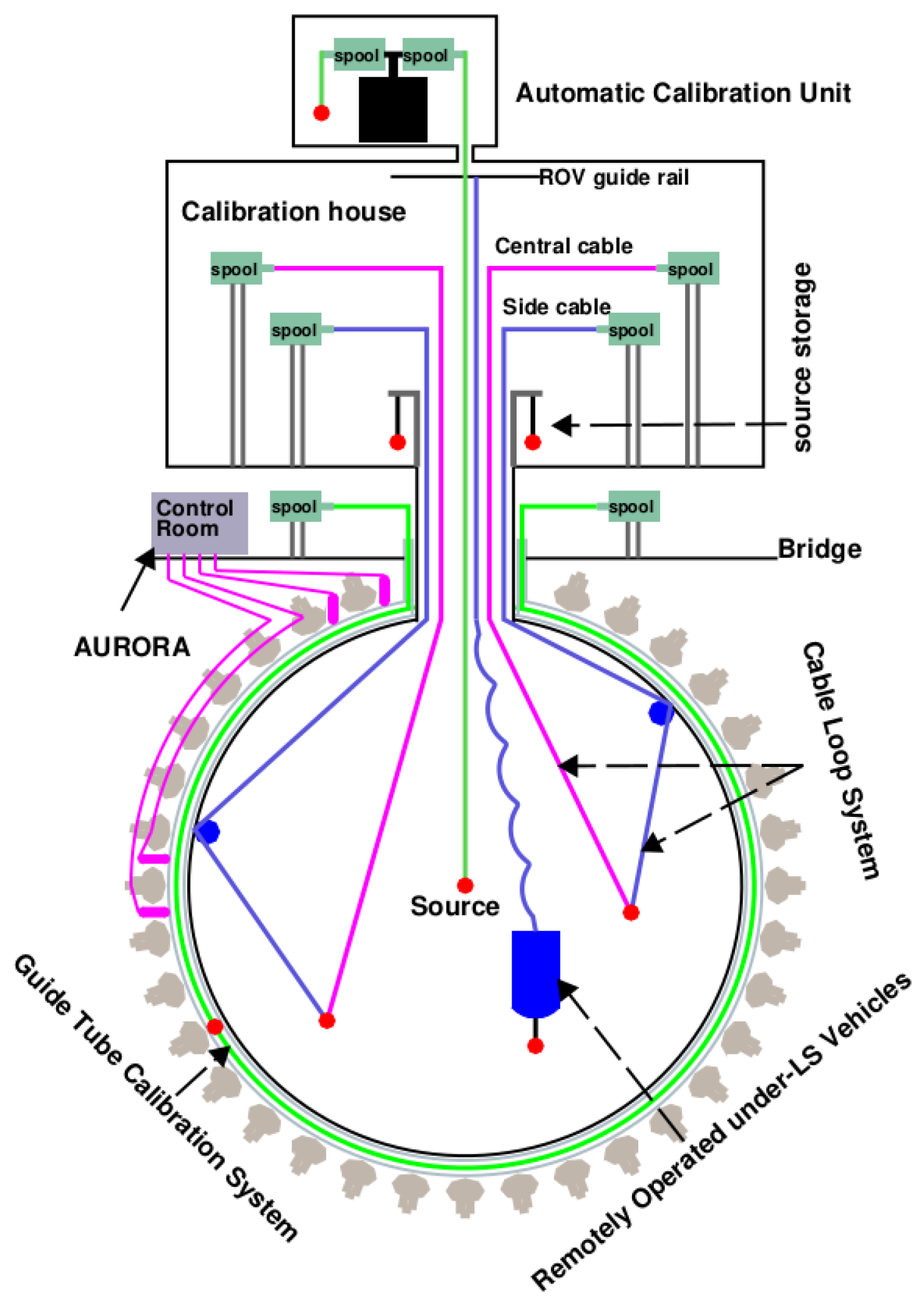
2. Calibration Hardware
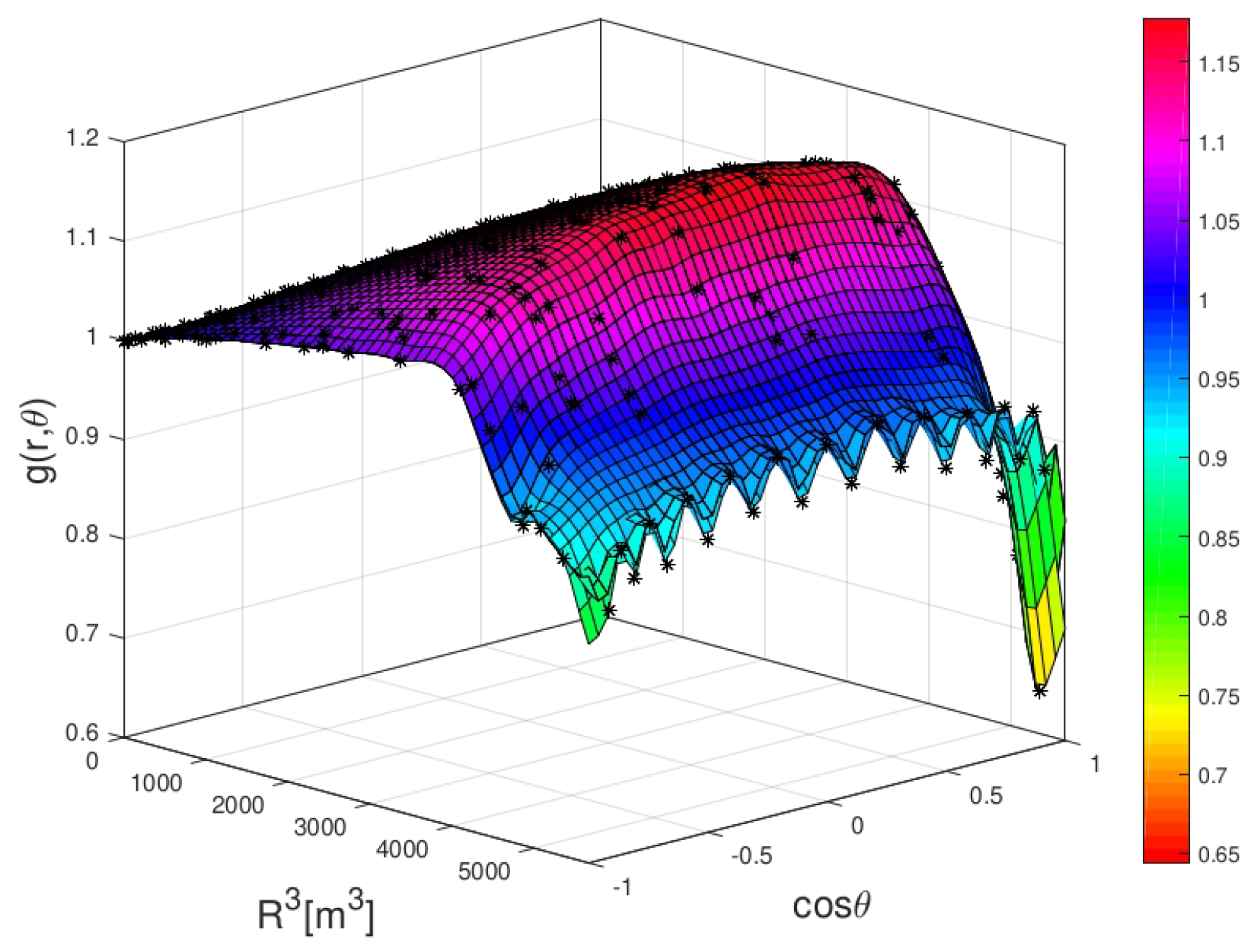
3. Optimization of Energy Resolution
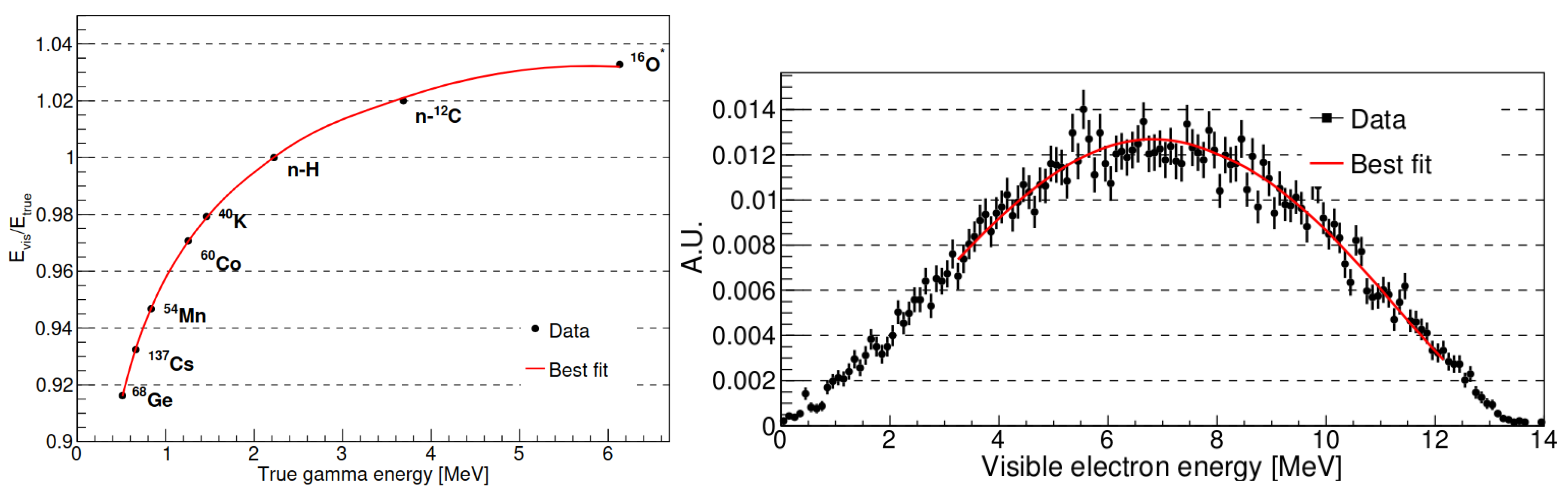
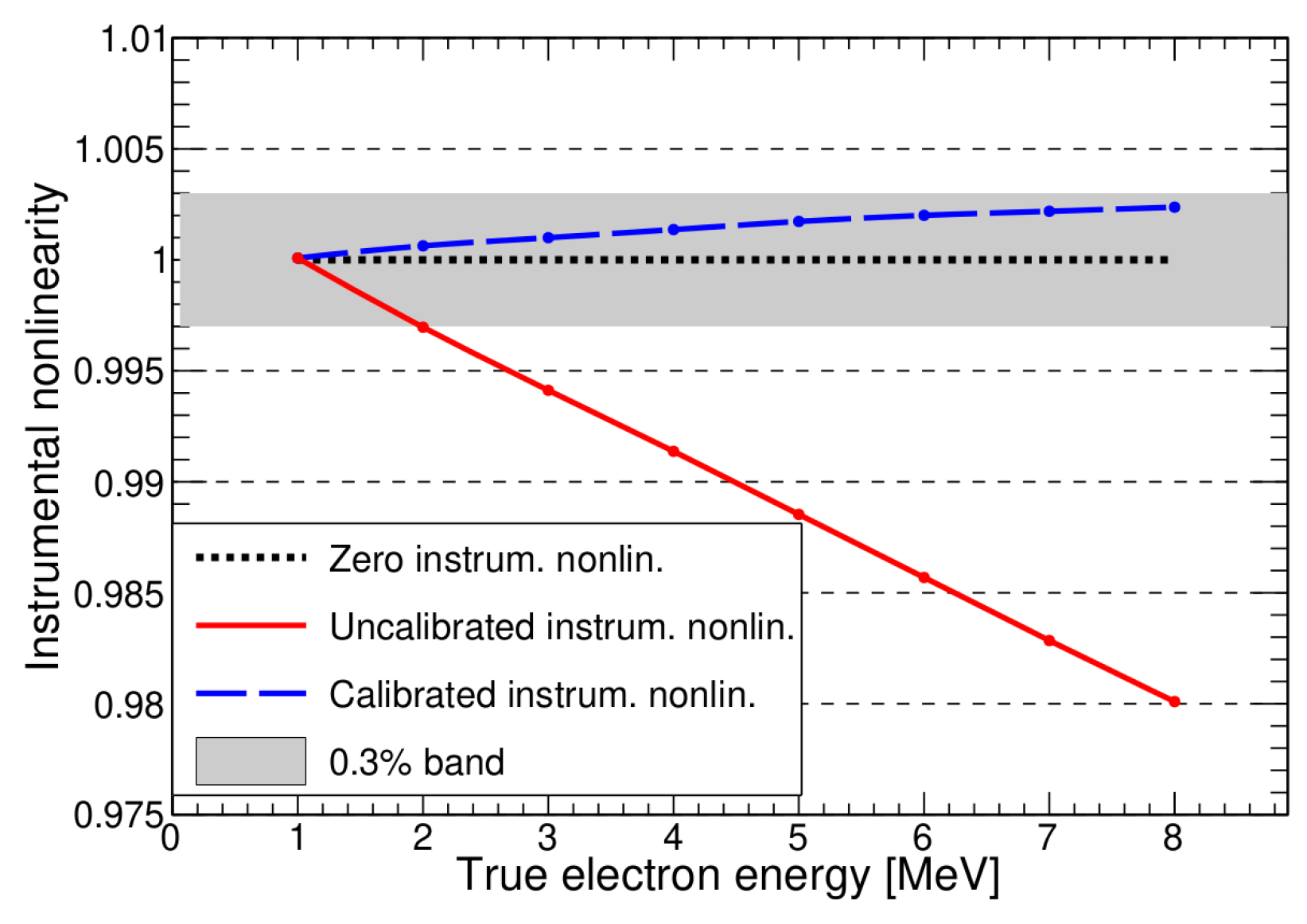
4. Optimization of Non-Linearity
5. Calibration Program
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- An, F.; An, G.; An, Q.; Antonelli, V.; Baussan, E.; Beacom, J.; Bezrukov, L.; Blyth, S.; Brugnera, R.; Avanzini, M.B.; et al. Neutrino physics with JUNO. J. Phys. G Nucl. Part. Phys. 2016, 43, 030401. [Google Scholar] [CrossRef]
- JUNO Collaboration. JUNO physics and detector. Prog. Part. Nucl. Phys. 2022, 123, 103927. [Google Scholar] [CrossRef]
- Abusleme, A.; Adam, T.; Ahmad, S.; Ahmed, R.; Aiello, S.; Akram, M.; An, F.; An, G.; An, Q.; Andronico, G.; et al. Calibration Strategy of the JUNO Experiment. J. High Energy Phys. 2021, 2021, 4. [Google Scholar] [CrossRef]
- Hui, J.; Liu, H.; Liu, J.; Meng, Y.; Xiao, M.; Xu, D.; Yang, L.; Ye, Z.; Zhang, F.; Zhang, T.; et al. The automatic calibration unit in JUNO. J. Instrum. 2021, 16, T08008. [Google Scholar] [CrossRef]
- Zhang, Y.; Hui, J.; Liu, J.; Xiao, M.; Zhang, T.; Zhang, F.; Meng, Y.; Xu, D.; Ye, Z. Cable loop calibration system for Jiangmen Underground Neutrino Observatory. Nucl. Instruments Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2021, 988, 164867. [Google Scholar] [CrossRef]
- Guo, Y.; Zhang, Q.; Zhang, F.; Xiao, M.; Liu, J.; Qu, E. Design of the Guide Tube Calibration System for the JUNO experiment. J. Instrum. 2019, 14, T09005. [Google Scholar] [CrossRef]
- Guo, Y.; Zhu, K.; Zhang, Q.; Zhang, F.; Meng, Y.; Liu, J.; Qu, E. Construction and simulation bias study of the guide Tube Calibration System for JUNO. J. Instrum. 2021, 16, T07005. [Google Scholar] [CrossRef]
- Feng, K.; Li, D.; Shi, Y.; Qin, K.; Luo, K. A novel remotely operated vehicle as the calibration system in JUNO. J. Instrum. 2018, 13, T12001. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, J.; Xiao, M.; Zhang, F.; Zhang, T. Laser calibration system in JUNO. J. Instrum. 2019, 14, P01009. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sources | Type | Radiation |
|---|---|---|
| Cs | 0.662 MeV | |
| Mn | 0.835 MeV | |
| Co | 1.173 MeV + 1.333 MeV | |
| K | 1.461 MeV | |
| Ge | annihilation: 0.511 MeV + 0.511 MeV | |
| Am-Be | n, | neutron + 4.42 MeV () |
| Am-C | n, | neutron + 6.13 MeV () |
| 2.22 MeV | ||
| C | 4.94 MeV or 3.68 MeV + 1.26 MeV |
| Program | Source | System | Points | DAQ Time [min] |
|---|---|---|---|---|
| Comprehensive | Neutron (Am-C) | ACU, CLS, GT | 250 | 1262 |
| Neutron (Am-Be) | ACU | 1 | 17 | |
| Laser | ACU | 10 | 333 | |
| Ge | ACU | 1 | 17 | |
| Cs | ACU | 1 | 17 | |
| Mn | ACU | 1 | 17 | |
| Co | ACU | 1 | 17 | |
| K | ACU | 1 | 100 | |
| Monthly | Neutron (Am-C) | ACU | 27 | 27 |
| Laser | ACU | 27 | 54 | |
| Neutron (Am-C) | GLS | 40 | 40 | |
| Neutron (Am-C) | GT | 23 | 23 | |
| Weekly | Neutron (Am-C) | ACU | 5 | 5 |
| Laser | ACU | 10 | 20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Basilico, D., on behalf of JUNO Collaboration. Calibration Strategy for the JUNO Experiment. Phys. Sci. Forum 2023, 8, 31. https://doi.org/10.3390/psf2023008031
Basilico D on behalf of JUNO Collaboration. Calibration Strategy for the JUNO Experiment. Physical Sciences Forum. 2023; 8(1):31. https://doi.org/10.3390/psf2023008031
Chicago/Turabian StyleBasilico, Davide on behalf of JUNO Collaboration. 2023. "Calibration Strategy for the JUNO Experiment" Physical Sciences Forum 8, no. 1: 31. https://doi.org/10.3390/psf2023008031
APA StyleBasilico, D., on behalf of JUNO Collaboration. (2023). Calibration Strategy for the JUNO Experiment. Physical Sciences Forum, 8(1), 31. https://doi.org/10.3390/psf2023008031