1. Some Well-Known “Randomness” Measures
It is of primary importance to assess the “randomness” of a certain random variable
X, which represents some identifier, cryptographic key, signature or any type of intended secret. Applications include pseudo-random bit generators [
1], general cipher security [
2], randomness extractors [
3] and hash functions ([
4], Chapter 8), physically unclonable functions [
5], true random number generators [
6], to list but a few. In all of these examples,
X takes finitely many values
with probabilities
. In this paper, it will be convenient to denote
any rearrangement of the probabilities
in descending order (where ties can be resolved arbitrarily),
is the maximum probability,
the second maximum, etc. In addition, we need to define the cumulative sums
where, in particular,
.
Many different criteria can be used to evaluate the randomness of
X or its distribution
, depending on the type of attack that can be carried out to recover the whole or part of the secret, possibly after observing disclosed data
Y. The observed random variable
Y can be any random variable and is not necessarily discrete. The conditional probability distribution of
X having observed
is denoted by
to distinguish it from from the unconditional distribution
. To simplify the notation, we write
A “sufficiently random” secret is often described as “entropic” in the literature. Indeed, Shannon’s entropy
(with the convention
) is known to provide a resistance criterion against modeling attacks. It was introduced by Shannon as a measure of uncertainty of
X. The average entropy after having observed
Y is the usual conditional entropy
A well-known generalization of Shannon’s entropy is the Rényi entropy of order
or
-entropy
where, by continuity as
, the 1-entropy
is Shannon’s entropy. One may consider many different definitions of conditional
-entropy [
7], but for many applications the preferred choice is Arimoto’s definition [
8,
9,
10]
where the expectation over
Y is taken over the “
-norm” inside the logarithm. (Strictly speaking,
is not a norm when
.)
For
, the collision entropy
where
is an independent copy of
X, is often used to ensure security against collision attacks. Perhaps one of the most popular criteria is the min-entropy defined when
as
whose maximization is equivalent to a probability criterion to ensure a worst-case security level. Arimoto’s conditional
∞-entropy takes the form
where we have noted
The latter quantities correspond to the minimum probability of decision error using a MAP (maximum a posteriori probability) rule (see, e.g., [
11]).
Guess work or guessing entropy [
2,
12]
and more generally guessing moments of order
or
-guessing entropy
are also of great interest in relation to
-entropy [
10,
13,
14]. The conditional versions given observation
Y are the expectations
When
, this represents the average number of guesses that an attacker has to make to guess the secret
X correctly after having observed
Y [
13].
2. Statistical (Total Variation) Distance to the Uniform Distribution
As shown in the sequel, all quantities introduced in the preceding section (H, , , G, ) have many properties in common. In particular, each of these quantities attains
its minimum value for a delta (Dirac) distribution , that is, a deterministic random variable X with and all other probabilities ;
its maximum value for the uniform distribution , that is, a uniformly distributed random variable X with for all x.
Indeed, it can be easily checked that
where the lower (resp. upper) bounds are attained for a delta (resp. uniform) distribution, the uniform distribution is the “most entropic” (
), “hardest to guess” (
G), and “hardest to detect” (
).
The maximum entropy property is related to the minimization of divergence [
15]
where
denotes the Kullback-Leibler divergence which vanishes if and only if
. Therefore, entropy appears as the complementary value of the divergence to the uniform distribution. Similarly, for
-entropy,
where
denotes the Rényi
-divergence [
16] (Bhattacharyya distance for
).
Instead of the divergence to the uniform distribution, it is often desirable to rely instead on the statistical distance, also known as total variation distance to the uniform distribution. The general expression of the total variation distance is
where the
factor is there to ensure that
. Equivalently,
where the maximum is over any event
T and
,
denote the respective probabilities w.r.t.
p and
q. As is well known, the maximum
is attained when
.
The total variation criterion is particularly important because a very small distance ensures that no statistical test can effectively distinguish between p and q. In fact, given some observation X following either p (null hypothesis ) or q (alternate hypothesis ), such a statistical test takes the form “is ?” (then accept , otherwise reject ). If is small enough, the type-I or type-II errors have total probability . Thus, in this sense the two hypotheses p and q are undistinguishable (statistically equivalent).
By analogy with (
20) and (
21) we can then define “
statistical randomness”
as the complementary value of the statistical distance to the uniform distribution, i.e., such that
holds. With this definition,
is maximum
when
, i.e.,
. Thus the uniform distribution
u is the “most random”. What is fundamental is that
ensures that
no statistical test can effectively distinguish the actual distribution from the uniform distribution.
Again the “least random” distribution corresponds to the deterministic case. In fact, from (
24) we have
where
of cardinality
, and
by definition (
2). It is easily seen that
attains its maximum value
if and only if
is a delta distribution. In summary
where the lower (resp. upper) bound is attained for a delta (resp. uniform) distribution. The conditional version is again taken by averaging over the observation:
3. F-Concavity: Knowledge Reduces Randomness and Data Processing
Knowledge of the observed data
Y (on average)
reduces uncertainty, improves detection or guessing, and reduces randomness in the sense that:
When
, the property
is well-known (“conditioning reduces entropy” [
15]): the difference
is the mutual information, which is nonnegative. Property (
30) for
is also well known, see [
7,
8]. In view of (
10) and (
11), the case
in (
30) is equivalent to (32) which is obvious in the sense that any observation can only improve MAP detection. This, as well as (31), is also easily proved directly (see, e.g., [
17]).
For all quantities
H,
,
G,
R, the conditional quantity is obtained by averaging over the observation as in (
6), (13), (
16) and (
29). Since
, the fact that knowledge of
Y reduces
H,
,
G or
R amounts to saying that these are
concave functions of the distribution
p of
X. Note that concavity of
in
p is clear from the definition (
26), which shows (33).
For entropy H, this also has been given some physical interpretation: “mixing” distributions (taking convex combinations of probability distributions) can only increase the entropy on average. For example, given any two distributions p and q, where . Similarly, such mixing of distributions increases the average probability of error , guessing entropy G, and statistical randomness R.
For conditional
-entropy
where
, averaging over
Y in the definition (
8) is made on the
-norm of the distribution
, which is known to be convex for
(by Minkowski’s inequality) and concave for
(by the reverse Minkowski inequality), the fact that knowledge reduces
-entropy (inequality (
30)) is equivalent to the fact that
in (
6) is an
F-concave function, that is, an increasing function
F of a concave function in
p, where
. The average over
Y in
is made on the quantity
instead of
. Thus, for example,
is a log-concave function of
p.
A straightforward generalization of (
30)–(33) is the
data processing inequality: for any
Markov chain , i.e., such that
,
When
, the property
amounts to
, i.e., (post)-
processing can never increase information. Inequalities (
34)–(37) can be deduced from (
30)–(33) by considering a fixed
, averaging over
Z to show that
, etc. (
additional knowledge reduces randomness) and then noting that
by the Markov property—see, e.g., [
7,
18] for
and [
17] for
G. Conversely, (
30)–(33) can be re-obtained from (
34)–(37) as the particular case
(any deterministic variable representing zero information).
4. S-Concavity: Mixing Increases Randomness and Data Processing
Another type of mixing (different from the one described in the preceding section) is also useful in certain physical science considerations. It can be described as a sequence of elementary mixing operations as follows. Suppose that one only modifies two probability values and for . Since the result should be again a probability distribution, the sum should be kept constant. Then there are two possibilities:
decreases; the resulting distribution is “smoother”, “more spread out”, “more disordered”; the resulting operation can be written as where , also known as “transfer” operation. We call it elementary mixing operation or M-transformation in short.
increases; this is the reverse operation, an elementary unmixing operation or U-transformation in short.
We say that a quantity is s-concave if it increases by any M-transformation (equivalently, decreases by any U-transformation). Note that any increasing function F of an s-concave function is again s-concave.
This notion coincides with that of
Schur-concavity from majorization theory [
19]. In fact, we can say that
p is
majorized by
q, and we write
, if
p is obtained from
q by a (finite) sequence of elementary
M-transformations, or, what amounts the same, that
q majorizes
p, that is,
q is obtained from
p by a (finite) sequence of elementary
U-transformations. A well-known result ([
19], p. 34) states that
if and only if
(see definition (
2)) where always
.
From the above definitions it is immediate to see that all previously considered quantities
H,
,
G,
,
,
R are
s-concave,
mixing increases uncertainty, guessing, error, and randomness, that is,
implies
For
and
R this can be easily seen from the fact that these quantities can be written as (an increasing function of) a quantity of the form
where
is concave. Then the effet of an
M-transformation
gives
. For
it is obvious, and for
G and
it is also easily proved using characterization (
38) and summation by parts [
17].
Another kind of (functional or deterministic)
data processing inequality can be obtained from (
39)–(42) as a particular case. For any deterministic function
f,
Thus
deterministic processing (by f) decreases (cannot increase) uncertainty, can only make guessing or detection easier, and decreases randomness. For
the inequality
can also be seen from the data processing inequality of the preceding section by noting that
(since
is trivially a Markov chain).
To prove (
43)–(46) in general, consider preimages by
f of values of
; it is enough to show that each of the quantities
,
,
G, or
R decreases by the elementary operation consisting in putting together two distincts values
of
x in the same preimage of
y. However, for probability distributions, this operation amounts the
U-transformation
and the result follows by
s-concavity.
An equivalent property of (
43)–(46) is the fact that
any additional random variable Y increases uncertainty, probability of error, guessing, and randomness in the sense that
This is a particular case of (
43)–(46) applied to the joint
and the first projection
. Conversely, (
43)–(46) follows from (
47)–(50) by applying it to
in place of
and noting that the distribution of
is essentially that of
X.
5. Optimal Fano-Type and Pinsker-Type Bounds
We have seen that informational quantities such as entropies H, , guessing entropies G, on one hand, and statistical quantities such as probability of error for MAP detection and statistical randomness R on the other hand, satisfy many common properties: decrease by knowledge, data processing, increase by mixing, etc. For this reason, it is desirable to establish the best possible bounds between one informational quantity (such as or ) and one statistical quantity ( or ).
To achieve this, we remark that for any distribution
p, we have the following majorizations. For fixed
:
where (necessarily)
, and for fixed
:
where
as in (
27) and (necessarily)
(
K can possibly be any integer between 1 and
L). These majorizations are easily established using characterizations (
12), (
27) and (
38).
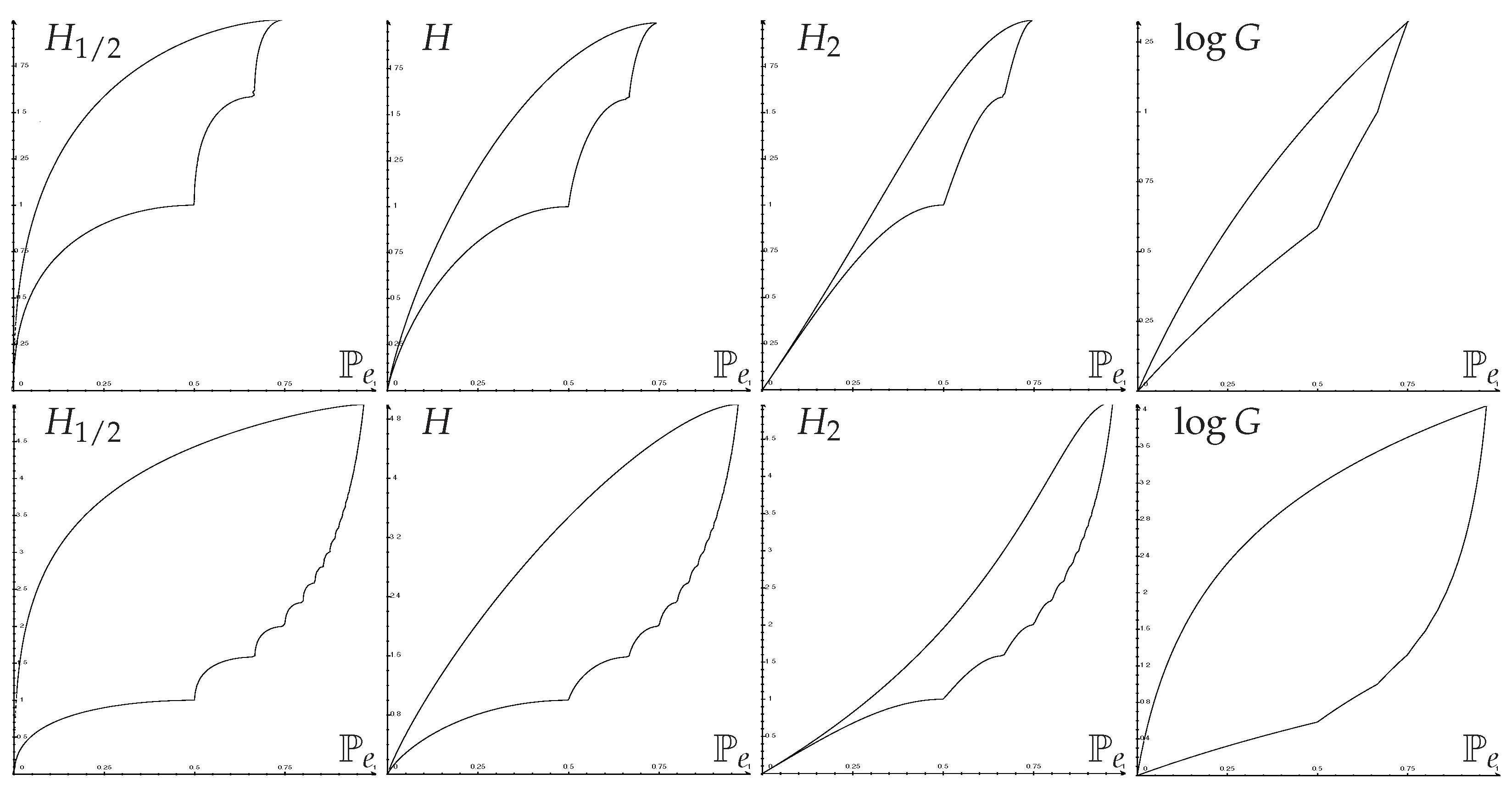
Applying
s-concavity of entropies
or
to (
51) gives closed-form upper bounds of entropies as a function of
, known as
Fano inequalities; and closed-form lower bounds, known as
reverse Fano inequalities.
Figure 1 shows some optimal regions.
The original Fano inequality was an upper bound on conditional entropy
as a function of
. It can be shown that upper bounds in the conditional case are unchanged.
Lower bounds of conditional entropies or
-entropies, however, have to be slightly changed due to the average operation inside the function
F (see
Section 3 above) by taking the convex enveloppe (piecewise linear) of the lower curve on
. In this way, one recovers easily the results of [
20] for
H,
11] for
, and [
14,
17] for
G and
.
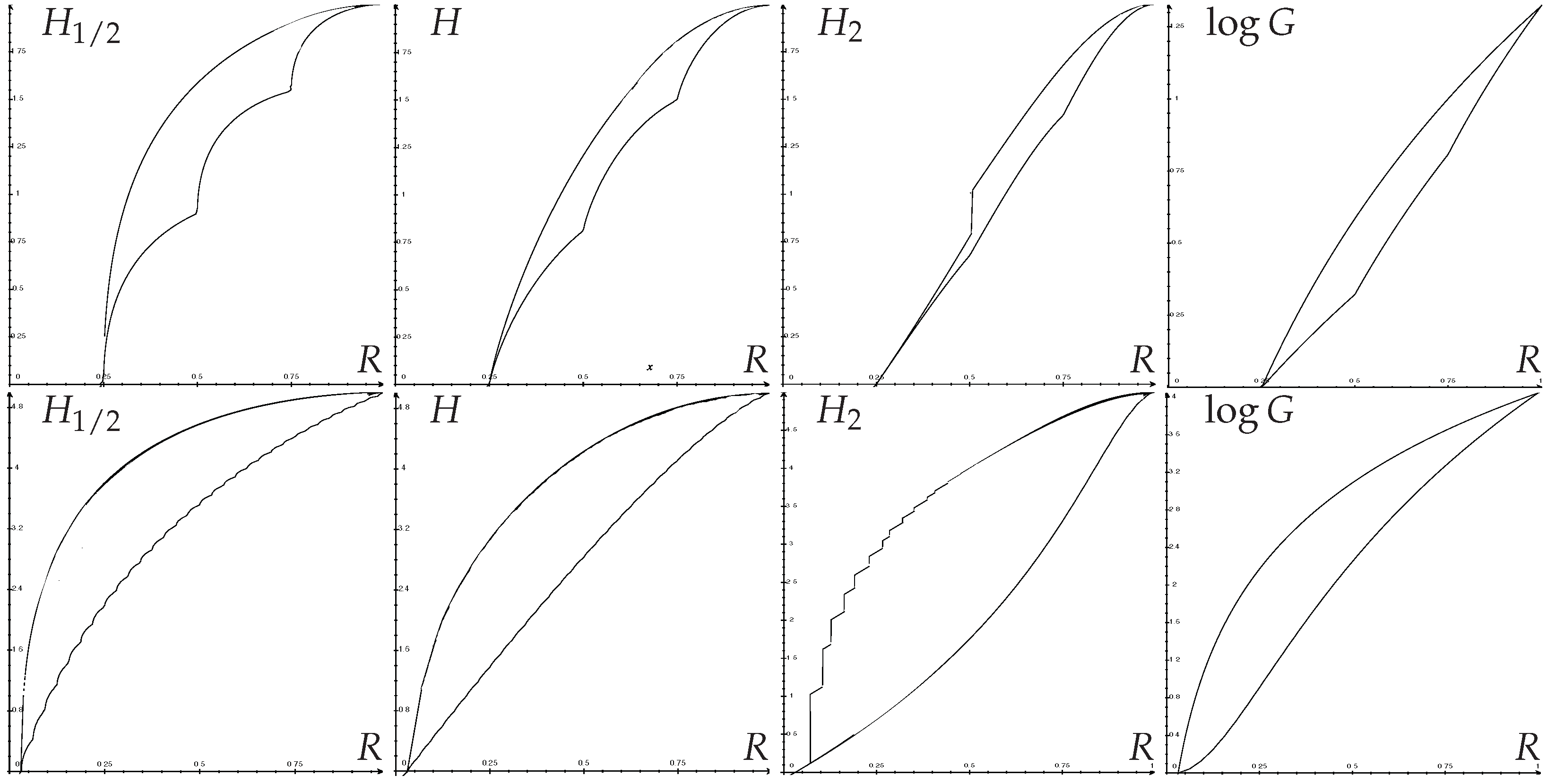
Likewise, applying
s-concavity of entropies
or
to (
52) gives closed-form upper bounds of entropies as a function of
R, similar to
Pinsker inequalities; and closed-form lower bounds, similar to
reverse Pinsker inequalities.
Figure 2 shows some optimal regions.
The various Pinsker and reverse Pinsker inequalities that can be found in the literature give bounds between
and
for general
q. Such inequalities find application in Quantum physics [
21] and to derive lower bounds on the minimax risk in nonparametric estimation [
22]. As they are of more general applicability, they turn out not to be optimal here since we have optimized the bounds in the particular case
. Using our method, one again recovers easily previous results of [
23] (and [
24], Theorem 26) for
H, and improves previous inequalities used for several applications [
3,
4,
6].
6. Conclusions
Using a simple method based on “mixing” or majorization, we have established optimal (Fano-type and Pinsker-type) bounds between entropic quantities (, ) and statistical quantities (, R) in an interplay between information theory and statistics. As a perspective, similar methodology could be developed for statistical distance to an arbitrary (not necessarily uniform) distribution.



{kind=link}
{kind=link}

