Abstract
We investigate the application of the Galerkin finite element method to approximate a stochastic semilinear space–time fractional wave equation. The equation is driven by integrated additive noise, and the time fractional order . The existence of a unique solution of the problem is proved by using the Banach fixed point theorem, and the spatial and temporal regularities of the solution are established. The noise is approximated with the piecewise constant function in time in order to obtain a stochastic regularized semilinear space–time wave equation which is then approximated using the Galerkin finite element method. The optimal error estimates are proved based on the various smoothing properties of the Mittag–Leffler functions. Numerical examples are provided to demonstrate the consistency between the theoretical findings and the obtained numerical results.
1. Introduction
Consider the following stochastic semilinear space–time fractional wave equation driven by fractionally integrated additive noise, with
where D is a bounded domain in with smooth boundary , and and represent the Caputo fractional derivative of order and the Riemann–Liouville fractional integral of order respectively. In addition, is the fractional Laplacian and denotes the space–time noise defined on a complete filtered probability space The initial values and and the nonlinear function (source term) are given functions.
The space–time fractional wave equation, denoted as (1) when devoid of noise, has been extensively explored by researchers due to its wide range of applications in engineering, physics, and biology [1,2,3]. The inclusion of the noise term allows for the characterization of random effects influencing the particle movement within a medium with memory or particles experiencing sticking and trapping phenomena. An example of such noise is the fractionally integrated noise , where the past random effects impact the internal energy [4]. For physical systems, stochastic perturbations arise from many natural sources, which cannot always be ignored. Therefore, it is necessary to include them in the corresponding deterministic model.
It is not possible to find the analytic solution of the space–time fractional Equation (1). Therefore, one needs to introduce and analyze some efficient numerical methods for solving (1). Li et al. [5] considered the Galerkin finite element method of (1) for the linear case with the additive Gaussian noise, that is, and , and obtain the error estimates. In [6], the authors studied the Galerkin finite element method for approximating the semilinear stochastic time-tempered fractional wave equations with multiplicative Gaussian noise and additive fractional Gaussian noise, but they only established error estimates for . Extensive theoretical results exist for the stochastic subdiffusion problem with , as seen in works such as [7,8,9,10,11,12], alongside corresponding numerical approximations in works including [13,14,15,16,17]. Regarding the theoretical and numerical findings for the stochastic wave equation, we recommend exploring references such as [18,19,20,21]. For theoretical advancements in fractional-order nonlinear differential equations, recent works such as [22,23,24,25,26,27] and their references provide a comprehensive overview.
In this paper, our focus lies on the application of the Galerkin finite element method to solve (1). Firstly, we establish the existence of a unique solution for (1) using the Banach fixed point theorem. Additionally, we analyze the spatial and temporal regularities of the solution. To approximate the noise, we employ a piecewise constant function in time, resulting in a stochastic regularized equation. This equation is then tackled using the Galerkin finite element method. We provide corresponding error estimates, utilizing the various smoothing properties exhibited by the Mittag–Leffler functions. We extend the error estimates in [5] from the linear case of (1) with Gaussian additive noise to the semilinear case with the more general integrated additive noise. We also extend the error estimates of [6] for the stochastic semilinear time fractional wave equation from to .
To establish our error estimates, we employ a similar argument as developed in our recent work [28], which focused on approximating the stochastic semilinear subdiffusion equation with . We demonstrate that the solution’s spatial and temporal regularities for (1) with surpass those with . Moreover, we observe that the convergence orders of the Galerkin finite element method for (1) with are higher than those with , as expected.
The paper is organized as follows. In Section 2, we provide some preliminaries and notations. In Section 3, we focus on the continuous problem and establish the existence, uniqueness, and regularity results for the problem (1). In Section 4, we discuss the approximation of the noise and obtain an error estimate for the regularized stochastic semilinear fractional superdiffusion problem. In Section 5, we consider the finite element approximation of the regularized problem and derive optimal error estimates. Finally, in Section 6, we present numerical experiments that validate our theoretical findings.
Throughout this paper, we denote C as a generic constant that is independent of the step size and the space step size h, which could be different at different occurrences. Additionally, we always assume is a small positive constant.
2. Notation and Preliminaries
This section provides notations and preliminary results that will be used in subsequent sections. We denote as the space of Lebesgue measurable or square integrable functions on D, with norm and inner product . Additionally, we denote . We assume that with domain is a closed linear self-adjoint positive definite operator with a compact inverse. Moreover, A has the eigenpairs , , subject to homogeneous Dirichlet boundary conditions.
Set or simply for any as a Hilbert space induced by the norm
For we denote by For any function define Let be a separable Hilbert space of all measurable square-integrable random variables with values in such that where denotes the expectation.
Define the space–time noise by, see [28],
where are some real-valued continuous functions rapidly decaying with respect to k. Here, the sequence is mutually independent and identically distributed one-dimensional standard Brownian motions, and the white noise is the formal derivative of the Brownian motion
Lemma 1
([28]). (It isometry property) Let be a strongly measurable mapping such that Let denote a real-valued standard Brownian motion. Then, the following isometry equality holds for :
To represent the solution of (1) in the integral form, we utilize the Laplace transform technique to write down the solution representation in terms of the Mittag–Leffler functions. The Mittag–Leffler functions are defined in [28], and we use them to express the solution in a compact form.
The following Lemma is related to the bounds of the Mittag–Leffler functions.
Lemma 2
((Mittag–Leffler function property) [28]). Let and . Let be defined by (4). Suppose that μ is an arbitrary real number such that Then, there exists a constant such that
Moreover, for it follows that
3. Existence, Uniqueness, and Regularity Results
This section is dedicated to studying the existence, uniqueness, and regularity results of the mild solution of the stochastic semilinear space–time fractional superdiffusion model (1).
Assumption 1.
There is a positive constant C such that the nonlinear function satisfies
and
Assumption 2.
The sequence with its derivative is uniformly bounded by and , respectively, i.e.,
where the series and are convergent.
Assumption 3.
Let It holds, with
where
and are the eigenvalues of the Laplacian with
Lemma 3
([5], Lemma 2.4). An adapted process is called a mild solution to (1) if it satisfies the following integral equation with
where denotes
and
Lemma 4
([5], Lemma 2.5). The solution of the homogenuous problem of (1) satisfies, for ,
and it also implies that
Lemma 5
([28]). Let , , For any and there holds,
Theorem 1
Proof.
Set , as the set of functions in with the following weighted norm For any fixed this norm is the same as the standard norm on We can therefore define a nonlinear map by
For any the function is a solution of (11) if and only if u is a fixed point of the map . In order to apply the Banach fixed point theorem it suffices to show that for an appropriately chosen is a contraction mapping. We first show that for any . By (15) and the Cauchy–Schwarz inequality we obtain with
Based on the smoothing properties of the solution operators and by Assumption 1, it follows that
By the smoothing property of the operator the isometry property of Brownian motion, we have with that,
Note that and ; we then obtain , which implies that . Now we consider the contraction property. For any given two functions and in it follows from (15) with the smoothing property and boundedness of with and that
Note that
With , choose sufficiently large , we obtain
Theorem 2.
(Regularity) Let Assume that Assumptions 1–3 hold. Let , with Then, the following regularity results hold for the solution u of (11) with and ,
Proof.
From the definition of the mild solution (11) and with it follows that, with
For and , by the regularity Lemma in [5], we have
and
For using the smoothing property of the operator and the Assumption 1, we have
For , by isometry property of the Brownian motion and Assumption 2 and the smoothing property of the operator , we arrive at, with ,
which implies that
Hence the proof of the theorem is completed. □
Assumption 4.
There is a positive constant C such that the nonlinear function satisfies, with with and
and
Theorem 3.
Let , . Assume that Assumptions 1–4 hold. Let . Then, there exists a unique mild solution given by (11) to the model problem for all
Proof.
The proof is similar to the existence and uniqueness theorem; therefore, we will only indicate the changes in that proof. Set as the set of functions in with the following weighted norm:
For the proof, it is now enough to show that the map is a contraction. We first show that for any . By (15) and the Cauchy–Schwarz inequality, we obtain with
By the smoothing properties of and with , and using the Assumption 1, it follows that
For the integral , a use of the isometry property and Assumptions 3 and 4 and the smoothing property of the operator , yields, with ,
To resolve the integral it is enough to choose , which means that since . Hence, we need to restrict in order to obtain by Assumption 3. With such choices of and r and by noting that , we arrive at
We note that and ; we obtain which implies that .
Next, we look at the contraction property of the mapping . For any given two functions and in , it follows from (15) that
Based on the same argument of the existence and uniqueness theorem proof, the rest of the proof follows and this concludes the proof. □
4. Approximation of Fractionally Integrated Noise
Let be the discretization of and be the time step size. The noise can be approximated by using Euler method,
with , , where , and is the normally distributed random variable with mean 0 and variance 1. Assume that is some approximation of . To be able to obtain an approximation of
in (1), we replace it with
here, is the characteristic function for the ith time step length and is some approximations of . The following is the regularized stochastic space–time fractional superdiffusion problem. Let be an approximation of u defined by
The solution of (32) takes the following form:
Here, where is the characteristic function defined on .
Assumption 5
([5]). Suppose that the coefficients are generated in such a way that
To regularize the noise , we need the following regularity assumption.
Assumption 6.
Let It holds, with
where κ is defined by
and are the eigenvalues of the Laplacian with .
By following similar proofs as in Theorems 1 and 2, we can establish the following theorems for the approximate solution .
Theorem 4
Theorem 5
(Regularity). Let . Suppose that Assumptions 1–6 hold. Let with and with . Then the following regularity result for the solution of Equation (33) holds with and ,
Theorem 6.
Let . Suppose that Assumptions 1–6 hold. Let u and be the solutions of Equations (1) and (32), respectively. We have, for any given
- 1.
- for ,
- 2.
- for ,
Proof.
By the definitions of and , we now rewrite as
where
and
We first estimate From the form of , using the smoothing property of the operator and Assumption 1, we arrive with at
For the estimate of , using the Ito isometry property and Assumption 6, we obtain
Note that, for a use of the boundedness property of the Mittag–Lefler function yields
Furthermore, for by using the asymptotic property of the Mittag–Lefler function, we have
Thus, we now arrive at
We now estimate . We first denote by and replace the variable s with in the second term of . Using the orthogonality property of we obtain
Thus, a use of the Cauchy–Schwarz inequality yields
For , using the mean value theorem and the Assumption 5, we arrive at
Now, following the same estimates as in (41)
For , we note by the Mittage–Leffler function property that
hence,
Now we estimate for the different and . We shall show that, with ,
Case 1. We now consider the case . If , then with , it implies that
Since , for and then for ,
and this implies that
Similarly, we may show that for , with ,
Therefore, we obtain, for ,
Case 2. Next, consider the case . If then we obtain,
Similarly, for , it follows that
Therefore, for we obtain,
Note that
and
Thus, we derive the following estimate for . For
For
Together with these estimates we obtain the following results.
- For , it follows that for ,
- For
An application of the Gronwall’s Lemma completes the rest of the proof. □
5. Finite Element Approximation and Error Analysis
Let D be the spatial domain and let be a shape regular and quasi-uniform triangulation of the domain D with spatial discretization parameter , where is the diameter of K. Let , be the piecewise linear finite element space with respect to the triangulation , that is,
Let and be the projection and fractional Ritz projection defined by and . We then have
Lemma 6
([28]). The operators and satisfy
and
Let be the discrete Laplacian operator defined by . Assume that are the eigenpairs of the discrete Laplacian, that is,
where forms an orthonormal basis of . Further, we introduce the following fractional discrete Laplacian , for ,
For the discrete norm can be defined by .
The semi-discrete finite element method approximation of Equation (32) is to seek , for such that
where are chosen as projections of the initial functions .
As it is in the continuous case, the solution of (57) takes the form
where for each the operators , and are defined from by
We have the following smoothing properties:
Lemma 7
([5]). For any and , there holds for
Lemma 8
([5]). (Inverse Estimate in ) For any there exists a constant C independent of h such that
We now consider the error estimates.
Theorem 7.
Proof.
Introducing as a solution of an intermediate discrete system
We split the error . Again using we split
From Lemma 6 it follows that, with
which means that
To estimate , note that satisfies the following equation
and hence, the representation of solution is written as
Choose and separately, from Lemma 6 with and Lemma 7, it follows that for and that
Now an application of regularity shows
where we used the fact that since and . We now combine (63), (66), and (67) to arrive at an estimate for as, with and ,
Now to estimate , note that satisfies
and therefore we now write in the integral form as
Again, choose . From Lemma 6 with and Lemma 7, it follows for and for that
An application of the Gronwall’s Lemma completes the rest of the proof. □
The main result of this paper is obtained by combining Theorems 6 and 7.
Theorem 8.
Let , . Suppose that Assumptions 1–6 hold. Let u and be the solutions of (1) and (57), respectively. Let with Then, there exists a positive constant C such that, for any with and
- 1.
- for
- 2.
- for
Remark 1.
In particular, when the noise is the trace class noise, i.e.,
In this case we have , , , where , , , we obtain with
which are consistent with the results for the stochastic heat equation.
6. Numerical Simulations
In this section, we will explore three numerical examples of the stochastic semilinear fractional wave equation. For simplicity, we will focus on the Laplacian operator, that is, in Equation (1). Our goal is to approximate Equation (1) with various functions and examine the experimentally determined orders of convergence in time. We consider both the cases of trace class and white noises. Specifically, we choose the following functions: , , and . By comparing the experimentally determined orders of convergence with the theoretical findings in Theorem 8, we observe consistent results, as expected. All the numerical simulations in this paper are performed on an Acer Aspire 5 Laptop.
To complete this, let us first introduce the numerical method for solving (8). Consider, with ,
where and are given smooth functions. Here, with ,
where are the Brownian motions. Here, denotes the eigenfunctions of the operator with . Further, let be the eigenpairs of the covariance operator Q of the stochastic process , that is,
We shall consider two cases in our numerical simulations.
Case 1: The white noise case, e.g., with , which implies that
where denotes the trace of the operator Q.
Case 2: The trace class case, e.g., with , which implies that
The numerical methods for solving stochastic time fractional partial differential equations are similar to the numerical methods for solving deterministic time fractional partial differential equations. The only difference is that we have the extra term g in the stochastic case and we need to consider how to approximate g.
Since the initial values in (79)–(81), it is easier to consider the numerical analysis for the time discretization scheme of (79)–(81).
Let be a partition of the time interval and the time step size. Let be a partition of the space interval and h the space step size.
Let be the piecewise linear finite element space defined by
The finite element method of (79)–(81) is to find such that, ,
where denotes the projection operator.
Let be the approximation of . We define the following time discretization scheme: find , with , such that, ,
where the weights are generated using the Lubich’s convolution quadrature formula, with ,
Let be the linear finite element basis functions defined by, with ,
To find the solution , we assume that
for some coefficients . Choose in (84), we have, with ,
where we assume the initial values and have the following expressions:
Denote
and
and
After some simple calculations, we may obtain the following mass and stiffness metrics
and
respectively. Then, (86) can be written as the following matrix form, ,
Denote . Then, (87) can be written as, with ,
Hence can be calculated using the following formula
We now consider how to calculate . The kth component in can be approximated by using the following formula:
where, with ,
See the MATLAB code in Appendix A.1 for calculating kth element of in .
We next consider how to calculate , which is more complicated than . Approximating the Riemann–Liouville fractional integral by the Lubich first-order convolution quadrature formula and truncating the noise term to terms, we obtain the lth component of by, with ,
where are generated by the Lubich first-order method, with ,
To solve (91), we first need to generate Brownian motions , . This can be performed by using MathWorks MATLAB function fbm1d.m [29], which gives the value of the fractional Brownian motion with the Hurst parameter at any fixed time T. Let and and let denote the reference time step size. Let be the time partition of . We generate the fractional Brownian motions with the Hurst number by using the MATLAB code in Appendix A.2. When , fbm1d.m generates the standard Brownian motions.
Since we do not know the exact solution of the system, we shall use the reference time step size and the space step size to calculate the reference solution . The spacial discretization is based on the linear finite element method.
We then choose and consider the different time step size to obtain the approximate solutions at .
Let us discuss how to calculate the lth component of in MATLAB. Denote
and
The lth component of the vector satisfies
Finally, we shall consider how to calculate the projections and of and , respectively. Here, we only consider the case . The calculation of is similar. Assume that
By the definition of , we obtain
Hence, can be calculated by
Example 1.

Consider the following stochastic time fractional PDE (Partial Differential Equation), with ,
where and the initial value and is defined by (78).
Let and transform the system (93)–(95) of u into the system of v. We shall consider the approximation of v at . We choose the space step size and the time step size to obtain the reference solution vref. To observe the time convergence orders, we consider the different time step sizes with to obtain the approximate solution V. We choose simulations to calculate the following L2 error at with the different time step sizes
By Theorem 8, the convergence order should be
In Table 1, we consider the case of trace class noise, where for . We observe that the experimentally determined time convergence orders are consistent with our theoretical convergence orders, as indicated in the numbers in the brackets. We have included the CPU time in seconds for running 20 simulations in each experiment. The CPU times exhibit similarity across the other tables; hence, we have decided not to include them in subsequent tables.
Table 1.
Time convergence orders in Example 1 at with trace class noise .
In Table 2, we consider the case of white noise, where for . We observe that the experimentally determined time convergence orders are slightly lower than the orders in the trace class noise case, as we expected.
Table 2.
Time convergence orders in Example 1 at with white noise .
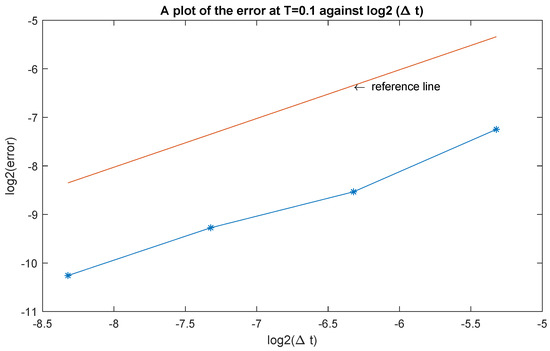
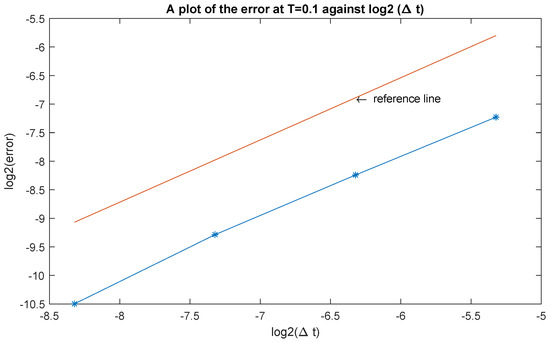
In Figure 1, we plot the experimentally determined orders of convergence with and as shown in Table 1 for the trace class noise. The expected convergence order is . To get the plot, we choose the different time step sizes and calculate the corresponding errors . By error estimate we have with the convergence order which implies that
Figure 1.
The experimentally determined orders of convergence with and in Table 1.
The reference line in Figure 1 is determined by four points and the blue line in Figure 1 is determined by the four points . If these two lines are parallel, then we may conclude that the experimentally determined convergence order is almost p. We use the similar approach to obtain other figures below.
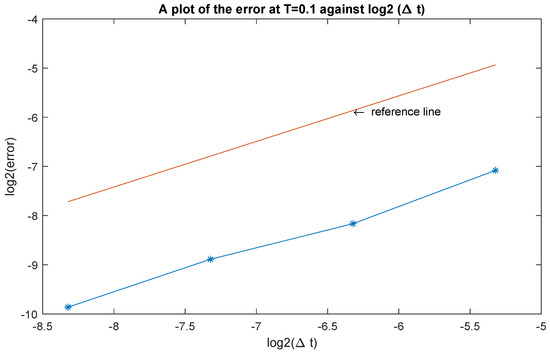
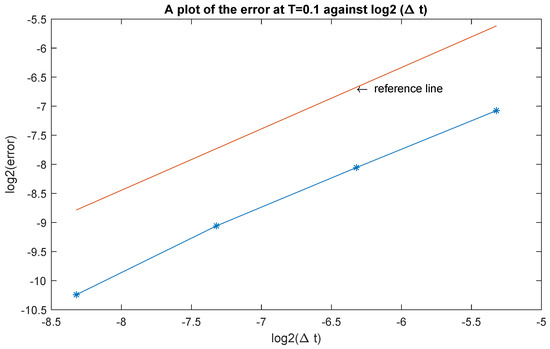
In Figure 2, we plot the experimentally determined orders of convergence with and as shown in Table 2 for the white noise. We observe that the convergence order is almost in the figure, where the reference line represents the order .
Figure 2.
The experimentally determined orders of convergence with and in Table 2.
Example 2.
Consider the following stochastic time fractional PDE, with ,
where and the initial values and is defined by (78).
We use the same notations as in Example 1. In Table 3, we consider the case of trace class noise, where for . We observe that the experimentally determined time convergence orders are consistent with our theoretical convergence orders, as indicated in the numbers in the brackets.
Table 3.
Time convergence orders in Example 2 at with trace class noise .
In Table 4, we consider the case of white noise, where for . We observe that the experimentally determined time convergence orders are slightly lower than the orders in the trace class noise case, as expected.
Table 4.
Time convergence orders in Example 2 at with white noise .
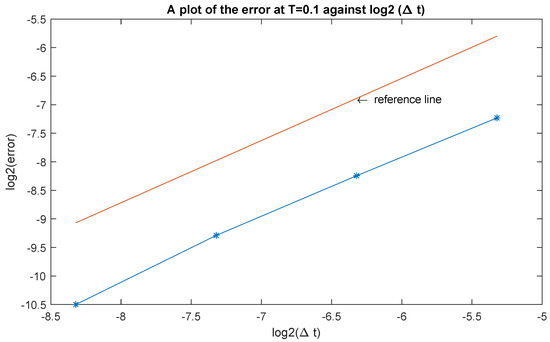
In Figure 3, we plot the experimentally determined orders of convergence with and for the trace class noise as shown in Table 3. The expected convergence order is . The reference line in the figure represents the order , which is consistent with our observations.
Figure 3.
The experimentally determined orders of convergence with and in Table 3.
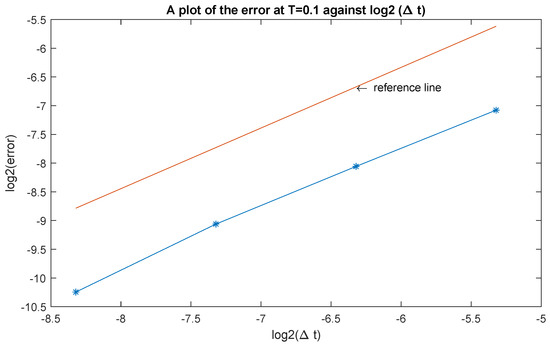
In Figure 4, we plot the experimentally determined orders of convergence with and as shown in Table 4 for the white noise. We observe that the convergence order is almost in the figure, where the reference line represents the order .
Figure 4.
The experimentally determined orders of convergence with and in Table 4.
Example 3.
Consider the following stochastic time fractional PDE, with ,
where and the initial values and are defined by (78).
We use the same notations as in Example 1. In Table 5, we consider the trace class noise, i.e., , and observe that the experimentally determined time convergence orders are consistent with our theoretical convergence orders. The numbers in the brackets denote the theoretical convergence orders.
Table 5.
Time convergence orders in Example 3 at with trace class noise .
In Table 6, we consider the white noise, i.e., , and observe that the experimentally determined time convergence orders are slightly less than the orders in the trace class noise case, as expected.
Table 6.
Time convergence orders in Example 3 at with white noise .
In Figure 5, we plot the experimentally determined orders of convergence with and in Table 5 for the trace class noise. The expected convergence order is . We indeed observe this in the figure where the reference line is for the order .
Figure 5.
The experimentally determined orders of convergence with and in Table 5.
In Figure 6, we plot the experimentally determined orders of convergence with and in Table 6 for the white noise. We observe that the convergence order is almost in the figure where the reference line is for the order .
Figure 6.
The experimentally determined orders of convergence with and in Table 6.
7. Conclusions
In this paper, we explore a numerical approach to approximate the stochastic semilinear space–time fractional wave equation. We establish the existence of a unique solution for this equation by using the Banach fixed point theorem, assuming that the nonlinear function satisfies the global Lipschitz condition. To obtain the stochastic regularized problem, we approximate the noise using a piecewise constant function in time. The finite element method is then employed to approximate the stochastic regularized problem. Furthermore, we propose a natural extension of this work, which involves considering more general nonlinear functions, such as the Allen–Cahn equation, as well as exploring different types of noise, including fractional noise with a Hurst parameter . Additionally, it might be very interesting to investigate more advanced fractal–fractional derivatives [30] in our stochastic space–time fractional wave equation.
Author Contributions
We have the equal contributions to this work. B.A.E. considered the theoretical analysis, performed the numerical simulation, and wrote the original version of the work. Y.Y. introduced and guided this research topic. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Acknowledgments
The author is grateful to the reviewers for their valuable and constructive comments, which improved the quality of the manuscript significantly.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
In this Appendix, we include some MATLAB codes used in Section 6.
Appendix A.1. Calculate the kth Element of (f(u(tn)),φk) in Fn in (90)
% find (fu, phi)
function y=fu_phi(x,n,tau,alpha,v,Ph_u0,Ph_u1)
tn=n∗tau;
h=x(2)-x(1);
U0=v+Ph_u0+tn∗Ph_u1;
U_1=[0;U0(1:end-1)];
U1=[U0(2:end);0];
% f(u)= sin(u)
F0=sin(U0); F_1=sin(U_1); F1=sin(U1);
y=h/4∗(F_1+2∗F0+F1);
Appendix A.2. Generate the Fractional Brownian Motions (t0), (t1),⋯ (tN), m = 1, 2, ⋯, M − 1 with the Hurst Number H ∈ [1/2,1]
.
W=[];
for j=1:M-1
[Wj,t]=fbm1d(H,Nref,T);
W=[W Wj];
end
W(1,:)=zeros(1, M-1);
Appendix A.3. Caculating gn (l) in (91)
% find (g, phi)
function y=g_phi(x,n,tau,ga,kappa,W)
y=[];
M=length(x)+1;
%Find w_ga=[w_{0}^{-ga} w_{1}^{-ga} w_{n-1}^{-ga}]
w_ga=[];
for nn=0:n-1
w_ga=[w_ga w_gru(nn,-ga)];
end
for k=1:M-1
A=dWdt_k(x,n,tau,kappa,W,k);
y1=tau^(ga)∗w_ga∗A;
y=[y;y1];
end
% Find dWdt_k
function y= dWdt_k(x,n,tau,kappa,W,k)
y=zeros(n,1);
M=length(x)+1;
for m=1:M-1
beta=2; % white noise beta=0, trace class beta=2
ga_m=m^(-beta);
k1=n:-1:1; %tn=n∗tau=(n∗kappa)∗dtref
dW_k1=W(k1∗kappa+1,m)-W((k1-1)∗kappa+1,m); %dW_k is a vector
h=x(2)-x(1);
x1=((k-1)∗h+k∗h)/2; x2= (k∗h+(k+1)∗h)/2;
e_phi=h/2∗(sqrt(2)∗sin(pi∗m∗x1)+sqrt(2)∗sin(pi∗m∗x2));
y=y+ga_m^(1/2)∗e_phi∗(dW_k1/tau);
end
References
- Meerschaert, M.M.; Schilling, R.L.; Sikorskii, A. Stochastic solutions for fractional wave equations. Nonlinear Dynam. 2015, 80, 1685–1695. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Holm, S. Fractional Laplacian time-space models for linear and nonlinear lossy media exhibiting arbitrary frequency power-law dependency. J. Acoust. Soc. Am. 2004, 115, 1424–1430. [Google Scholar] [CrossRef] [PubMed]
- Szabo, T.L. Time domain wave equations for lossy media obeying a frequency power law. J. Acoust. Soc. Am. 1994, 96, 491–500. [Google Scholar] [CrossRef]
- Chen, Z.Q.; Kim, K.H.; Kim, P. Fractional time stochastic partial differential equations. Stoch. Process. Appl. 2015, 125, 1470–1499. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Y.; Deng, W. Galerkin finite element approximations for stochastic space-time fractional wave equations. SIAM J. Numer. Anal. 2017, 55, 3173–3202. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Y.; Deng, W.; Nie, D. Galerkin finite element approximation for semilinear stochastic time-tempered fractional wave equations with multiplicative Gaussian noise and additive fractional Gaussian noise. Numer. Math. Theory Methods Appl. 2022, 15, 1063–1098. [Google Scholar] [CrossRef]
- Chen, G.G.; Duan, J.Q.; Zhang, J. Approximating dynamics of a singularity perturbed stochastic wave equation with a random dynamical boundary condition. SIAM J. Math. Anal. 2012, 45, 2790–2814. [Google Scholar] [CrossRef]
- Anh, V.V.; Leonenko, N.N.; Ruiz-Medina, M. Space-time fractional stochastic equations on regular bounded open domains. Fract. Calc. Appl. Anal. 2016, 19, 1161–1199. [Google Scholar] [CrossRef]
- Chen, L. Nonlinear stochastic time-fractional diffusion equations on : Moments. Hölder regularity and intermittency. Approximating dynamics of a singularity perturbed stochastic wave equation with a random dynamical boundary condition. Trans. Am. Math. Soc. 2017, 369, 8497–8535. [Google Scholar] [CrossRef]
- Chen, L.; Hu, Y.; Nualart, D. Nonlinear stochastic time-fractional slow and fast diffusion equations on . Stoch. Process. Appl. 2019, 129, 5073–5112. [Google Scholar] [CrossRef]
- Liu, W.; Röckner, M.; Da Silva, J.L. Quasi-linear (stochastic) partial differential equations with time-fractional derivatives. Stoch. Process. Appl. 2019, 129, 5073–5112. [Google Scholar] [CrossRef]
- Thach, T.N.; Tuan, N.H. Stochastic pseudo-parabolic equations with fractional derivative and fractional Brownian motion. Stoch. Anal. Appl. 2022, 40, 328–351. [Google Scholar] [CrossRef]
- Balan, R.M.; Tudor, C.A. The stochastic wave equation with fractional noise: A random field approach. Stoch. Process. Appl. 2010, 120, 2468–2494. [Google Scholar] [CrossRef]
- Jin, B.; Yan, Y.; Zhou, Z. Numerical approximation of stochastic time-fractional diffusion. ESAIM Math. Model. Numer. Anal. 2019, 53, 1245–1268. [Google Scholar] [CrossRef]
- Qi, R.; Wang, X. Error estimates of semidiscrete and fully discrete finite element methods for the Cahn-Hilliard-Cook equation. SIAM J. Numer. Anal. 2020, 58, 1613–1653. [Google Scholar] [CrossRef]
- Li, S.; Cao, W. On spectral Petrov–Galerkin method for solving optimal control problem governed by fractional diffusion equations with fractional noise. J. Sci. Comput. 2023, 94, 62. [Google Scholar] [CrossRef]
- Al-Maskari, M.; Karaa, S. Strong convergence rates for the approximation of a stochastic time-fractional Allen–Cahn equation. Commun. Nonlinear Sci. Numer. Simul. 2023, 119, 107099. [Google Scholar] [CrossRef]
- Balan, R.M. The stochastic wave equation with multiplicative fractional noise: A Malliavin calculus approach. Potential Anal. 2012, 36, 1–34. [Google Scholar] [CrossRef]
- Wang, X.; Gan, S.; Tang, J. Higher order strong approximations of semilinear stochastic wave equation with additive space-time white noise. SIAM J. Sci. Comput. 2014, 36, A2611–A2632. [Google Scholar] [CrossRef]
- Anton, R.; Cohen, D.; Larsson, S. Wang, X. Full discretization of semilinear stochastic wave equations driven by multiplicative noise. SIAM J. Numer. Anal. 2016, 54, 1093–1119. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, Q.; Zhang, Z. Physical properties preserving numerical simulation of stochastic fractional nonlinear wave equation. Commun. Nonlinear Sci. Numer. Simul. 2021, 99, 105832. [Google Scholar] [CrossRef]
- Alshammari, S.; Al-Sawalha, M.M.; Shah, R. Approximate analytical methods for a fractional-order nonlinear system of Jaulent–Miodek equation with energy-dependent Schrödinger potential. Fractal Fract. 2023, 7, 140. [Google Scholar] [CrossRef]
- Shah, N.A.; Hamed, Y.S.; Abualnaja, K.M.; Chung, J.D.; Shah, R.; Khan, A. A comparative analysis of fractional-order Kaup–Kupershmidt equation within different operators. Symmetry 2022, 14, 986. [Google Scholar] [CrossRef]
- Shah, N.A.; Alyousef, H.A.; El-Tantawy, S.A.; Shah, R.; Chung, J.D. Analytical investigation of fractional-order Korteweg–De-Vries-type equations under Atangana–Baleanu–Caputo operator: Modeling nonlinear waves in a plasma and fluid. Symmetry 2022, 14, 739. [Google Scholar] [CrossRef]
- Al-Sawalha, M.M.; Ababneh, O.Y.; Shah, R.; Shah, N.A.; Nonlaopon, K. Combination of Laplace transform and residual power series techniques of special fractional-order non-linear partial differential equations. AIMS Math. 2023, 8, 5266–5280. [Google Scholar] [CrossRef]
- Noor, S.; Alshehry, A.S.; Aljahdaly, N.H.; Dutt, H.M.; Khan, I.; Shah, R. Investigating the impact of fractional non-linearity in the Klein–Fock–Gordon equation on quantum dynamics. Symmetry 2023, 15, 881. [Google Scholar] [CrossRef]
- El-Tantawy, S.A.; Shah, R.; Alrowaily, A.W.; Shah, N.A.; Chung, J.D.; Ismaeel, S.M. A comparative study of the fractional-order Belousov–Zhabotinsky system. Mathematics 2023, 11, 1751. [Google Scholar] [CrossRef]
- Kang, W.; Eqwu, B.A.; Yan, Y. Galerkin finite element approximation of a stochastic semilinear fractional subdiffusion with fractionally integrated additive noise. IMA J. Numer. Anal. 2022, 42, 2301–2335. [Google Scholar] [CrossRef]
- Botev, Z.; Fractional Brownian Motion Generator. MATLAB Central File Exchange. Available online: https://www.mathworks.com/matlabcentral/fileexchange/38935-fractional-brownian-motion-generator (accessed on 20 June 2016).
- Youssri, Y.H.; Atta, A.G. Spectral collocation approach via normalized shifted Jacobi polynomials for the nonlinear Lane-Emden Equation with fractal-fractional derivative. Fractal Fract. 2023, 7, 133. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).