
An Atmospheric Turbulence Compensation Algorithm Based on FSM-DM Cascaded AO Architecture for FSO Communications




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
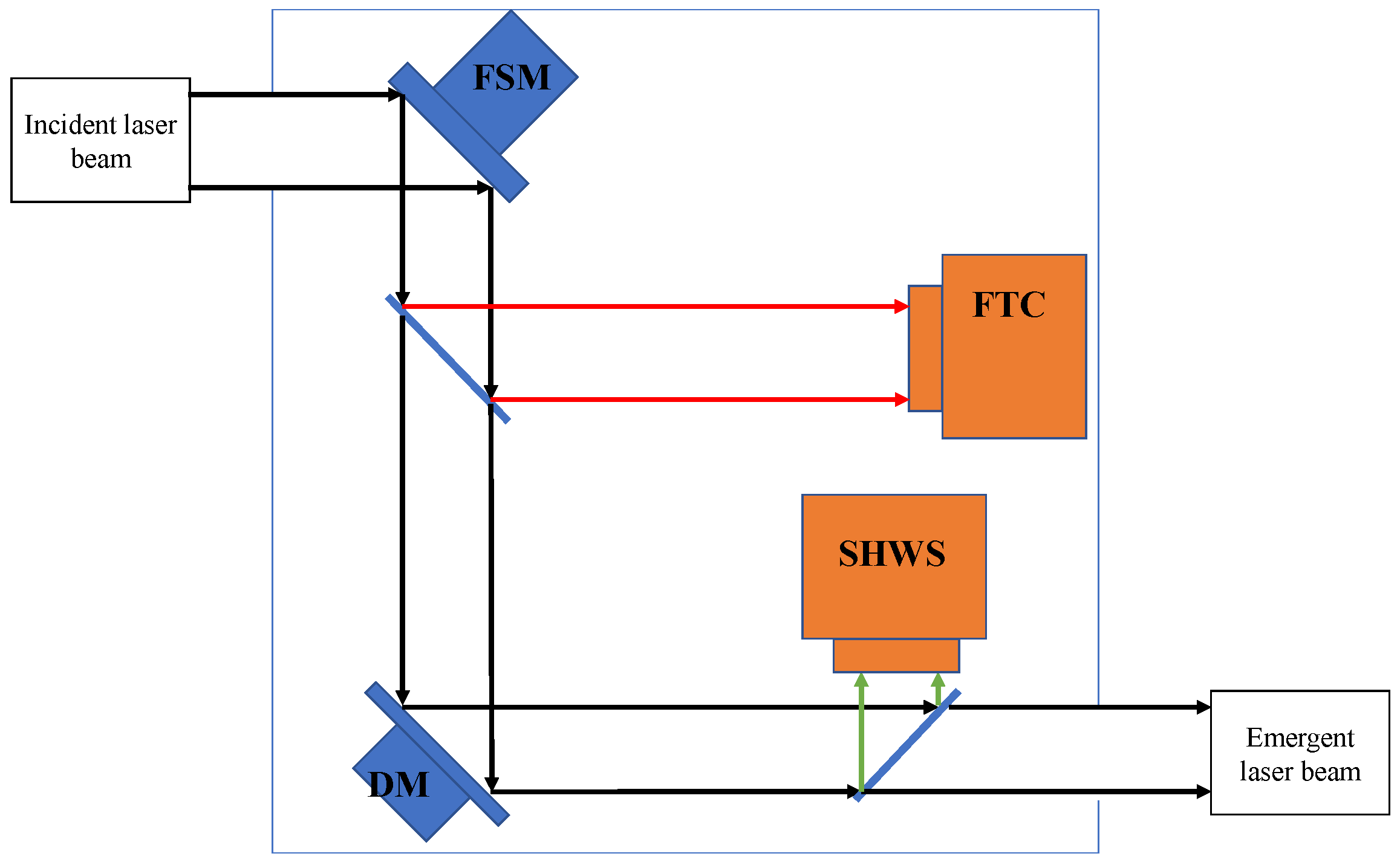
2. FSM-DM Cascaded AO Architecture
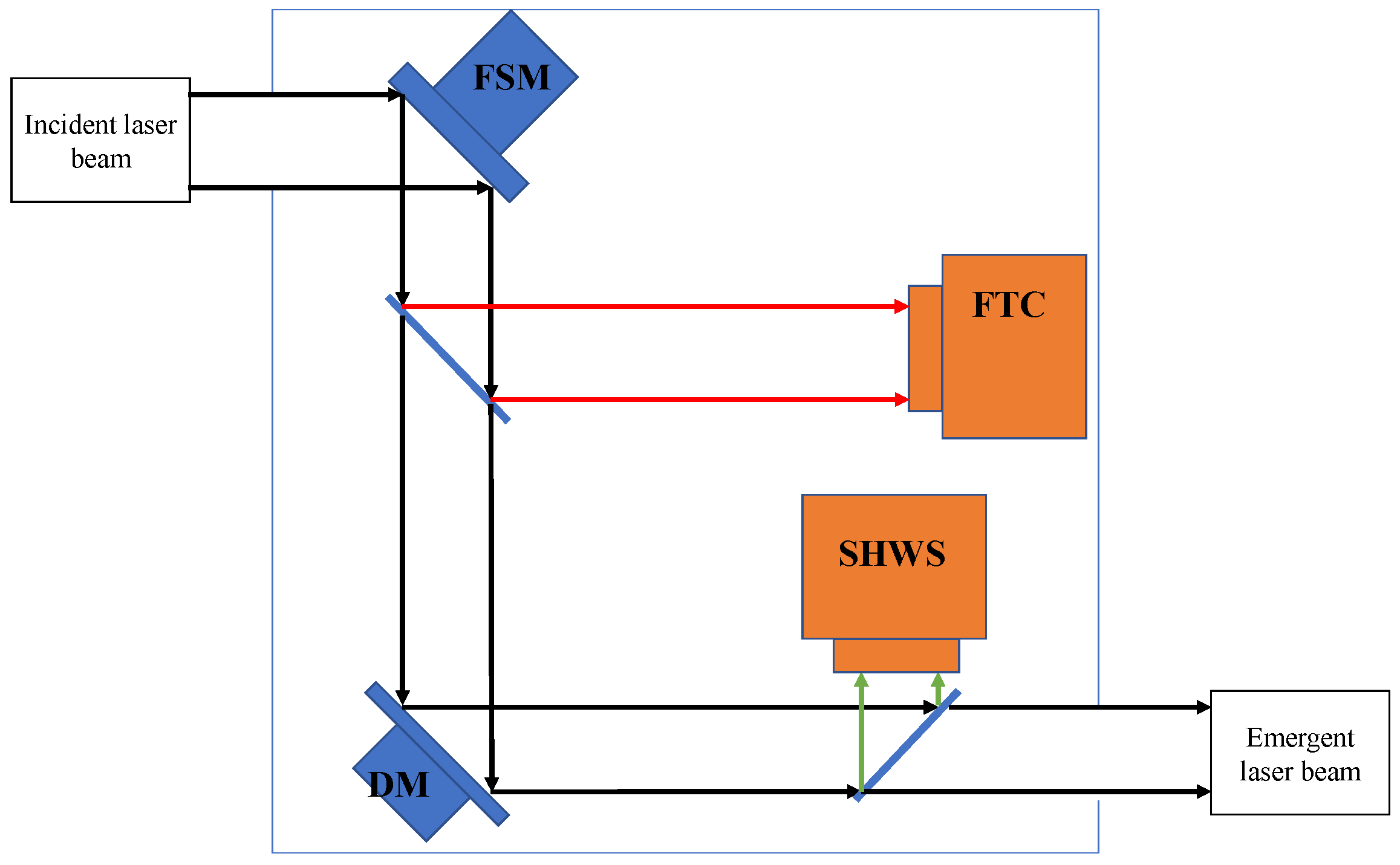
2.1. Proposed Architecture Description
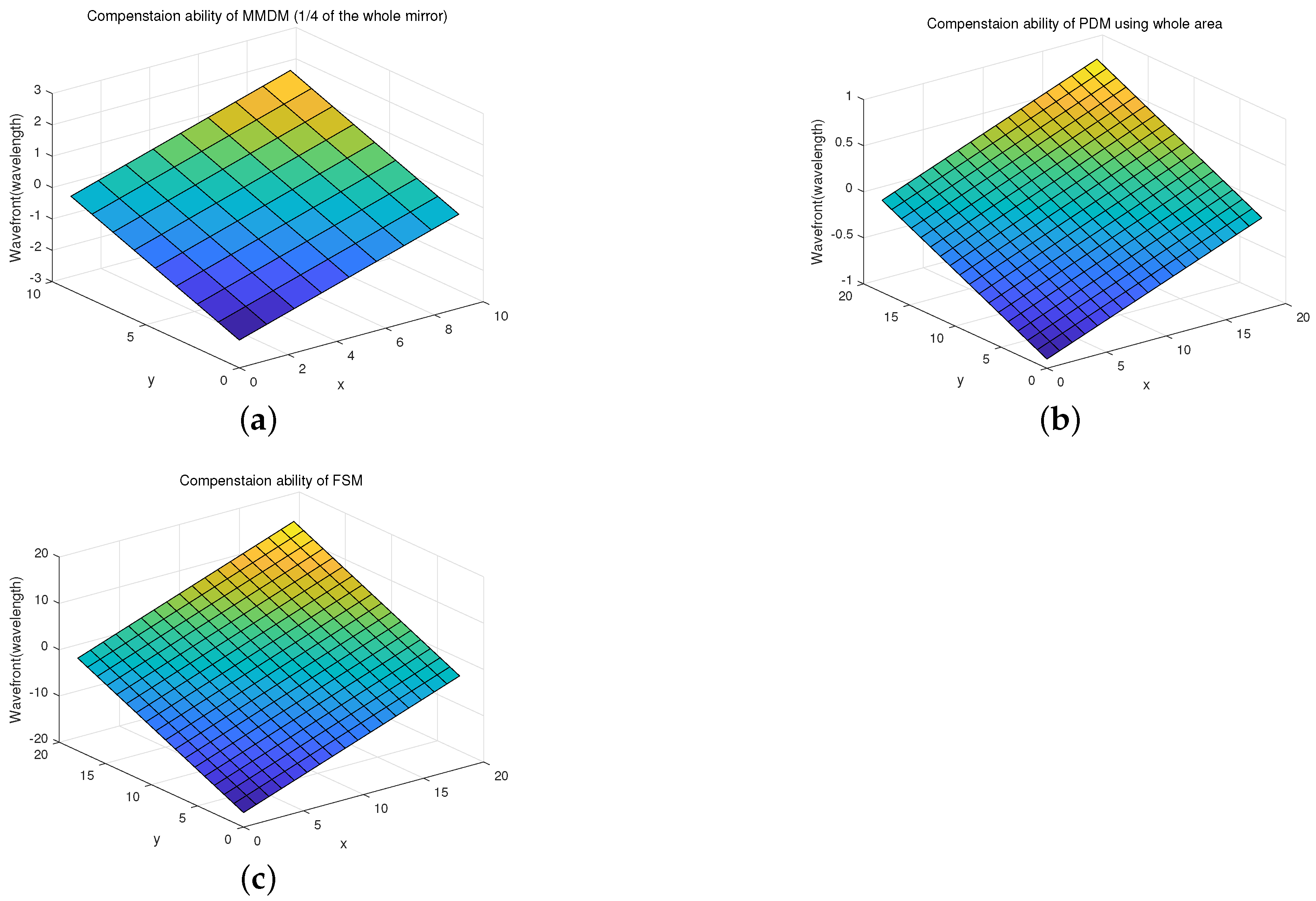
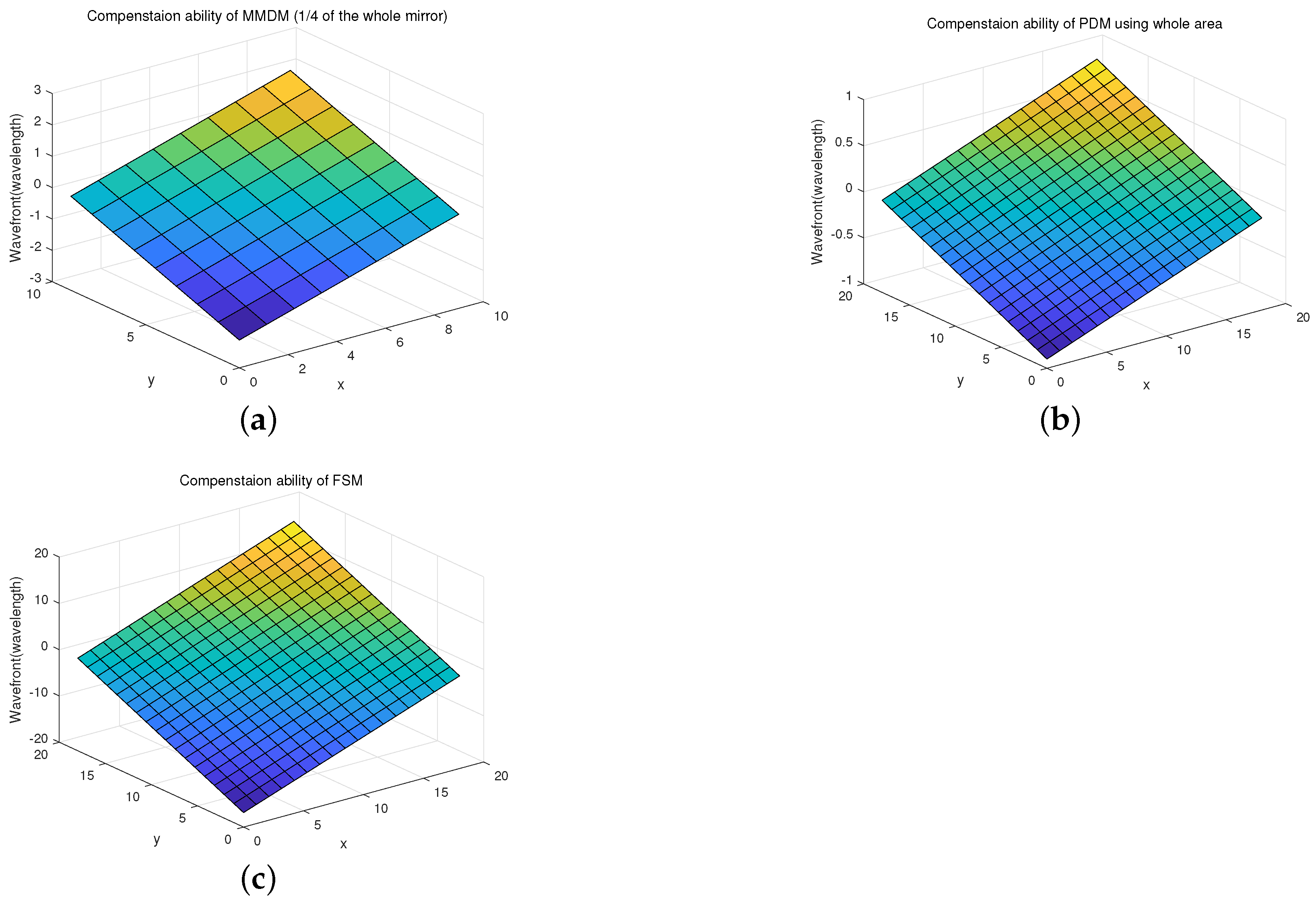
2.2. Theoretical Compensation Ability of FSM and DM Compensating Tilts Aberrations
3. High-Dynamic Atmospheric Turbulence Compensation Algorithm
3.1. Zernike Polynomials Based Phase Reconstruction Method
3.2. Modeling Strategy
3.3. Computing Controlling Voltages
| Algorithm 1: A description of the Guass–Newton method |
|
3.4. Capturing Aberrations
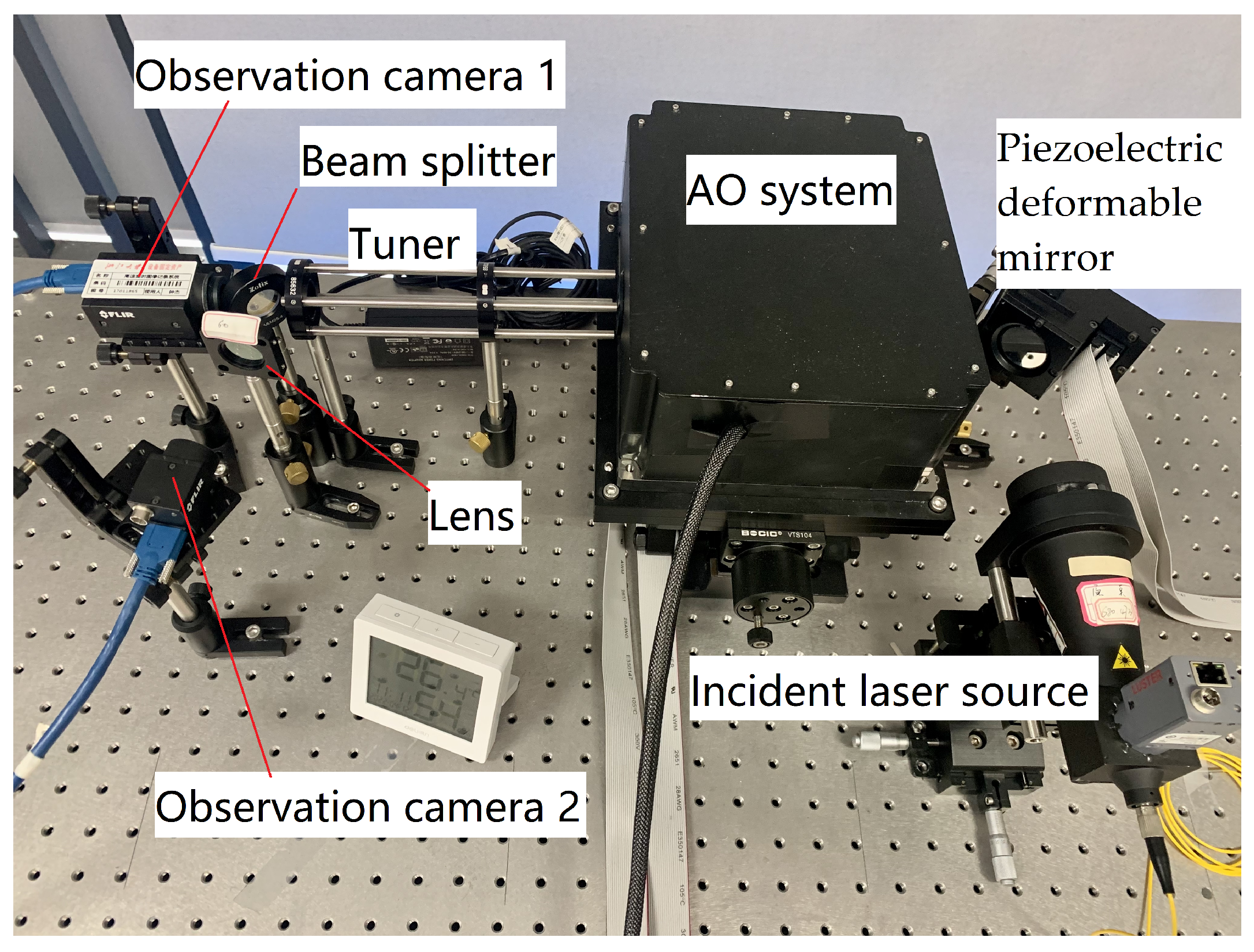
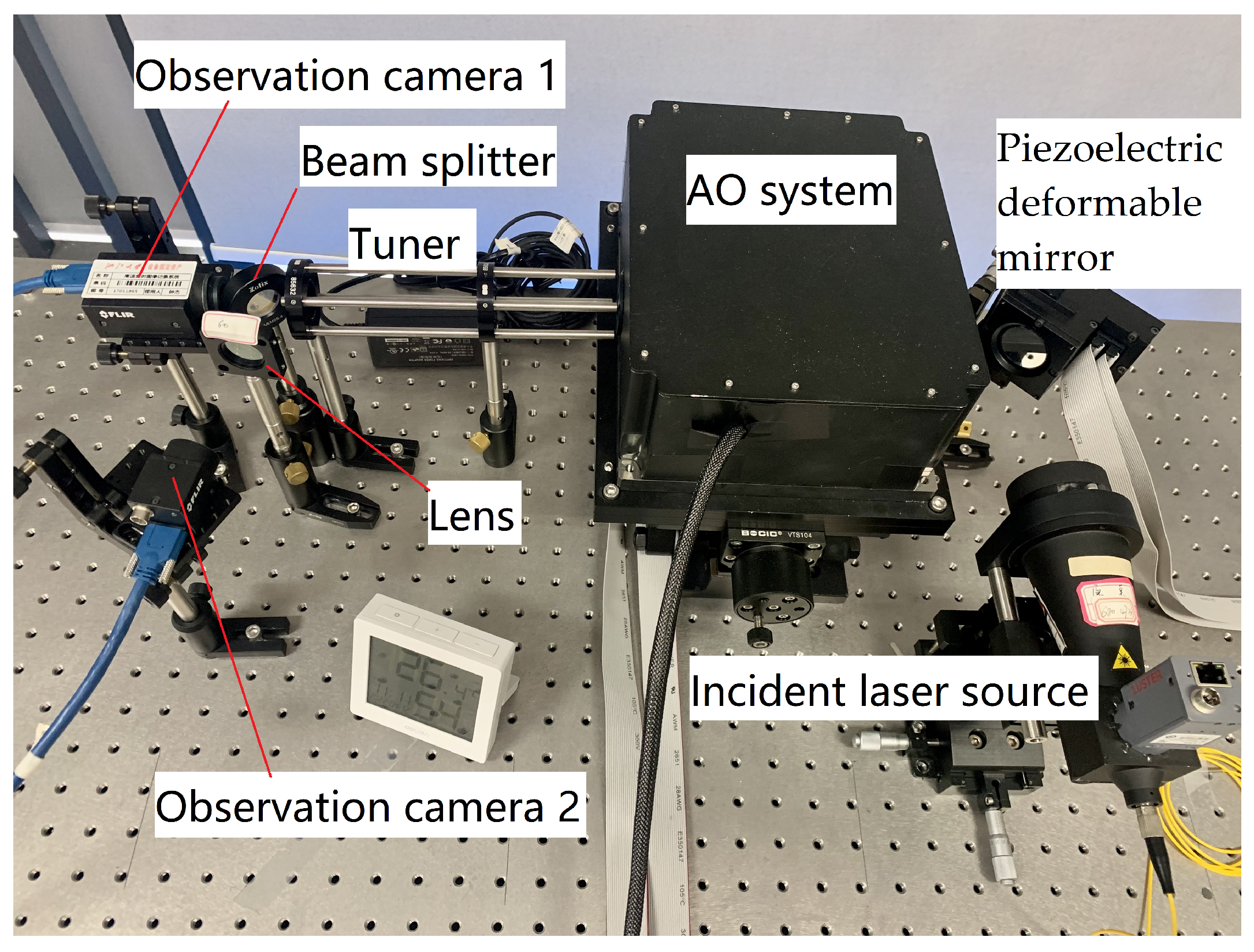
4. Implementation and Experimental Results
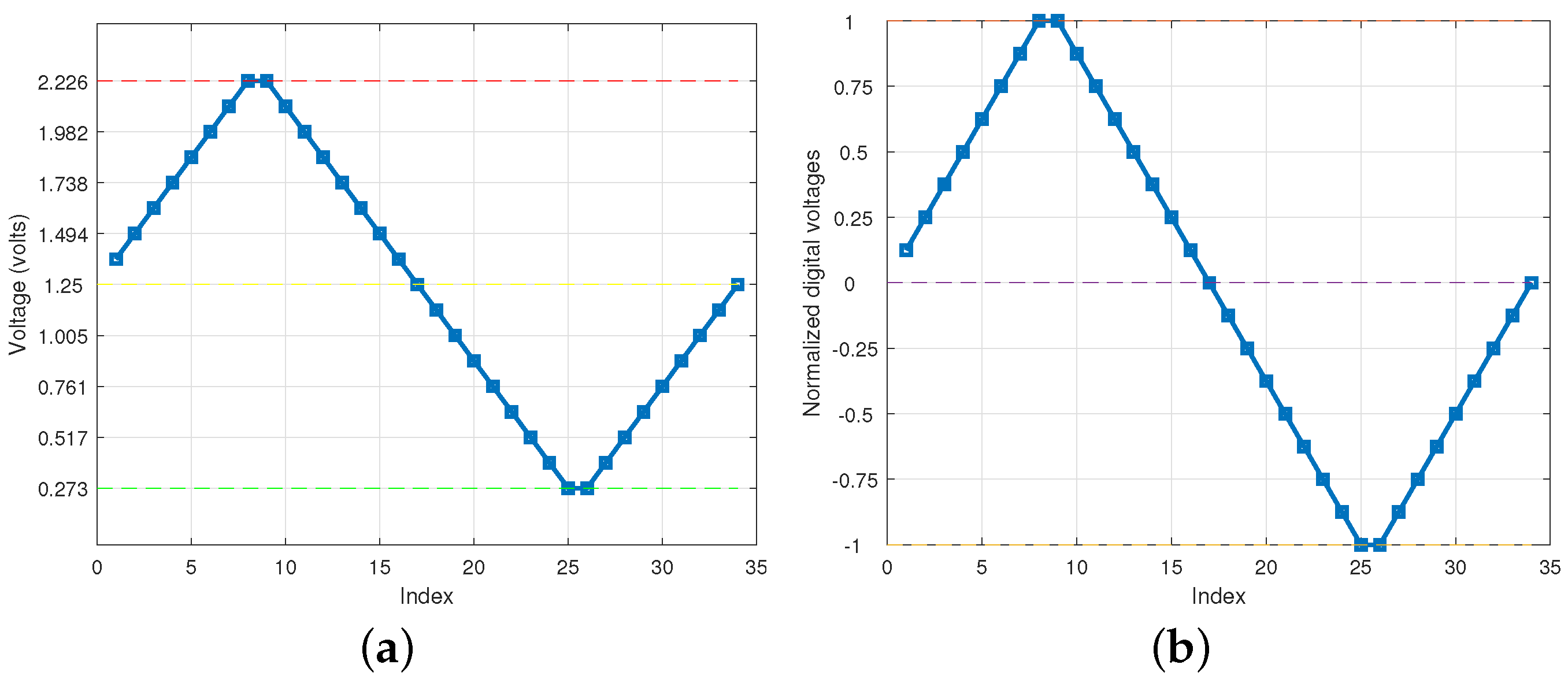
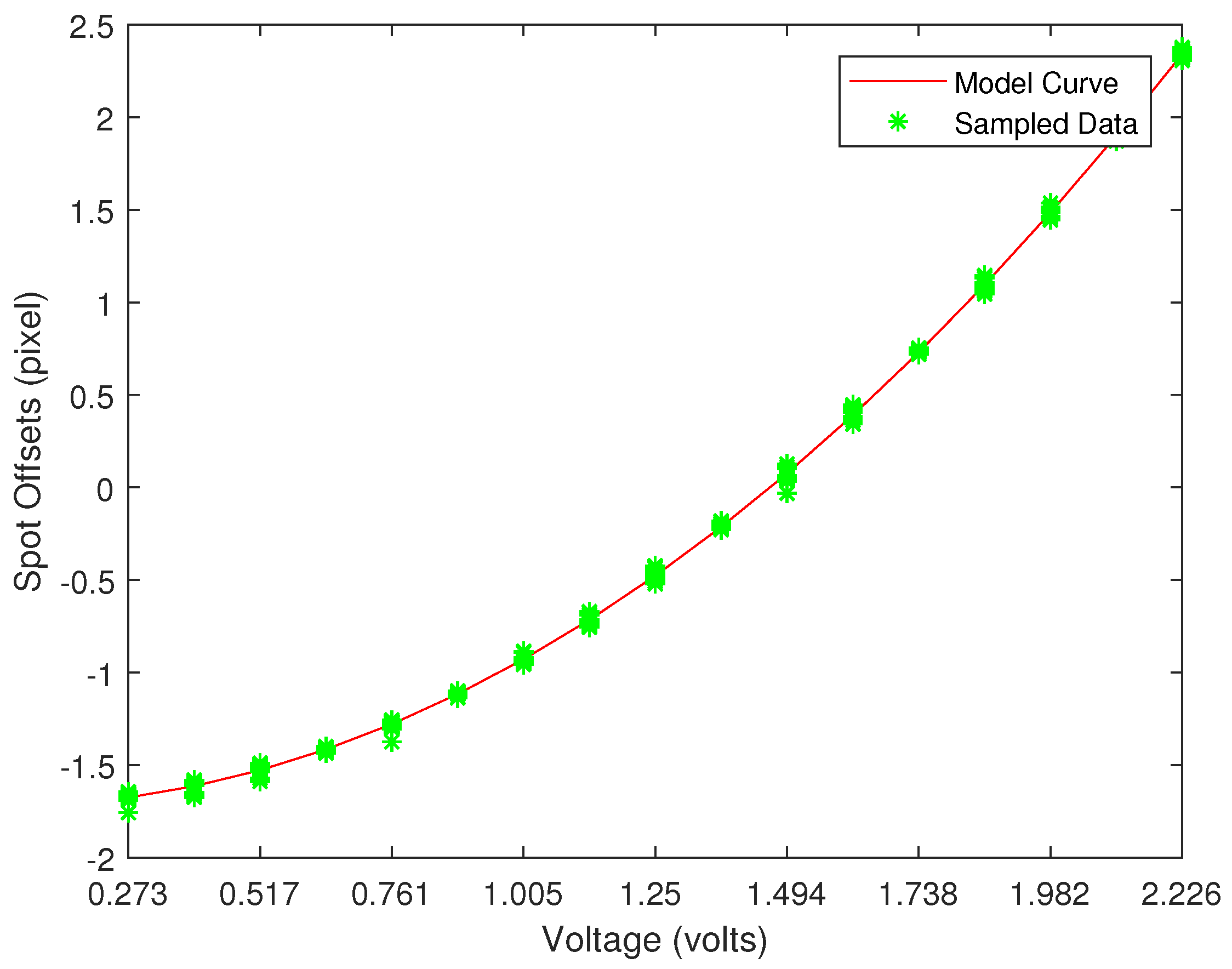
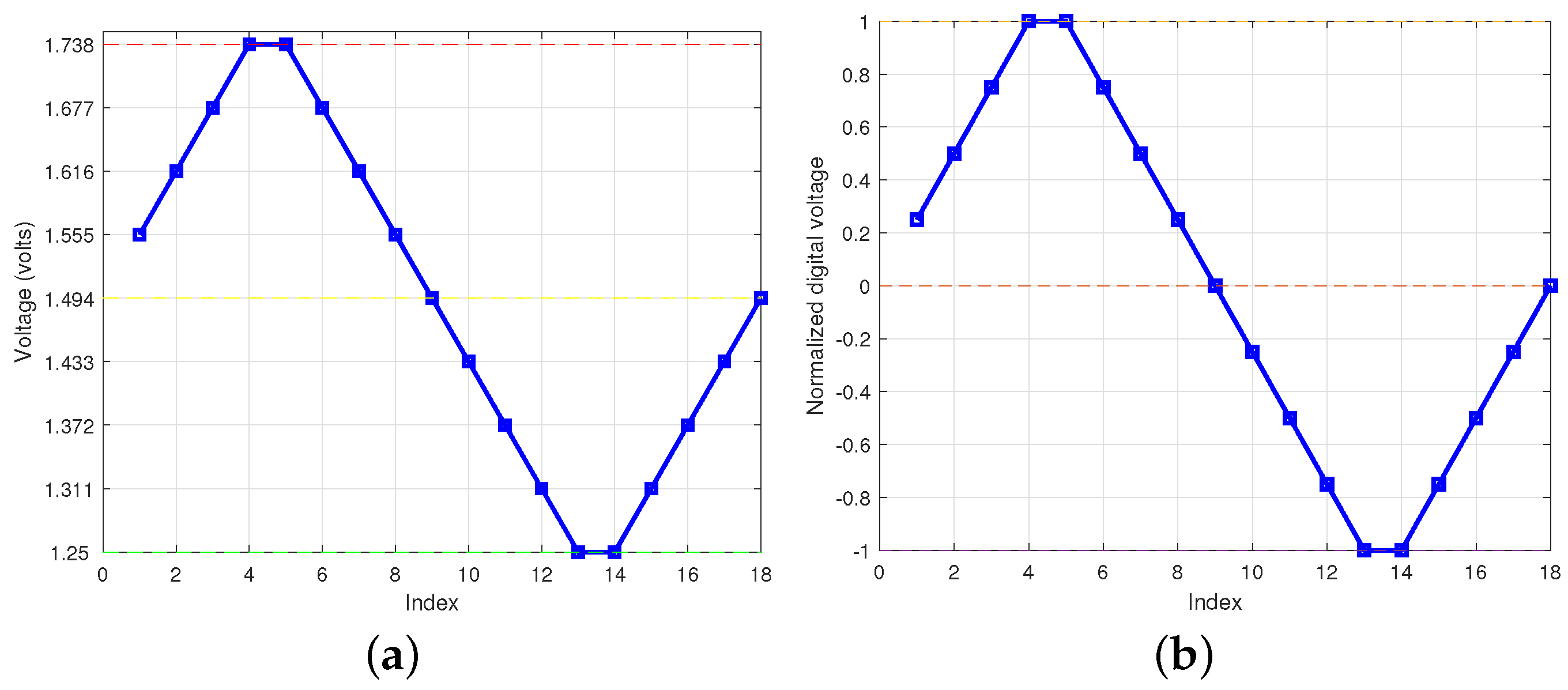
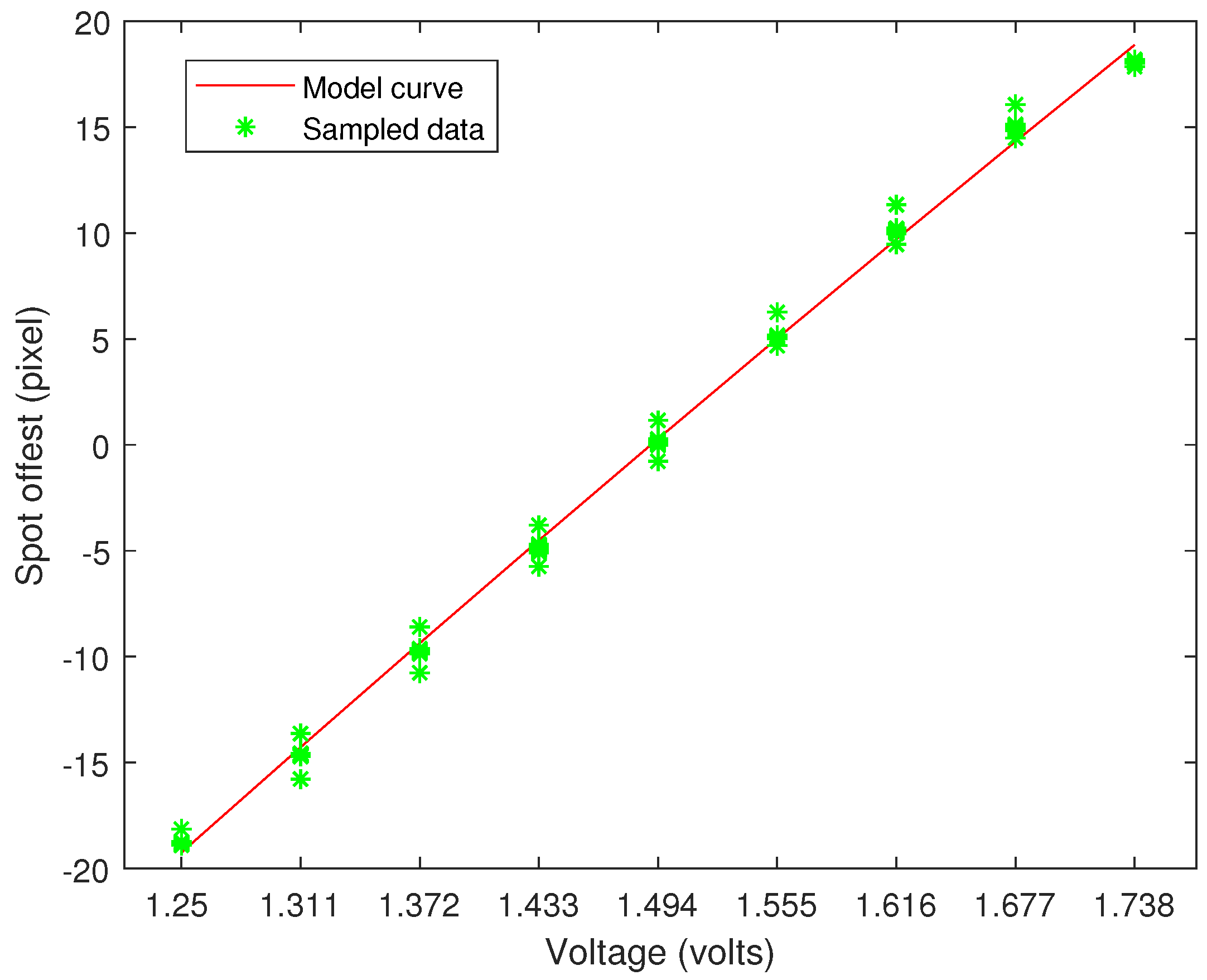
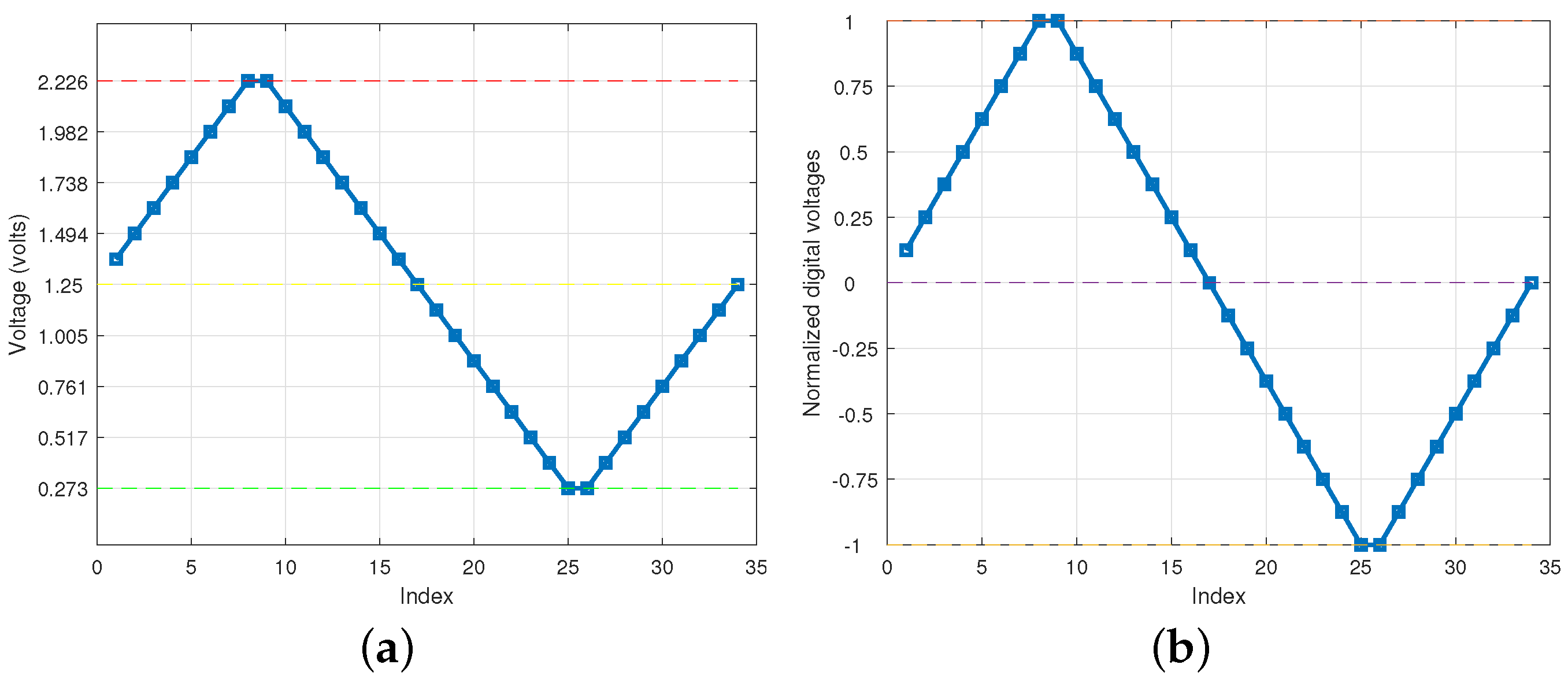
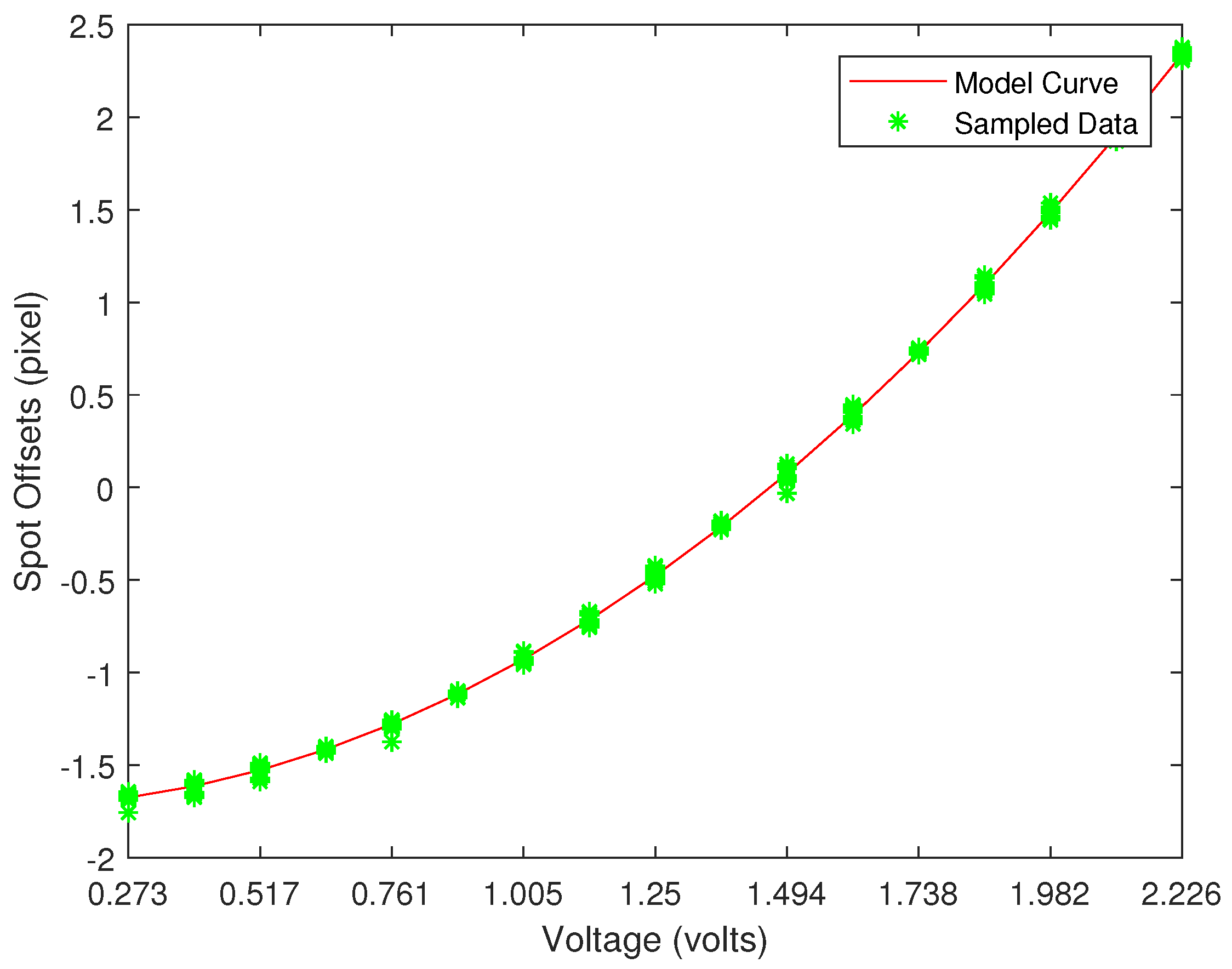
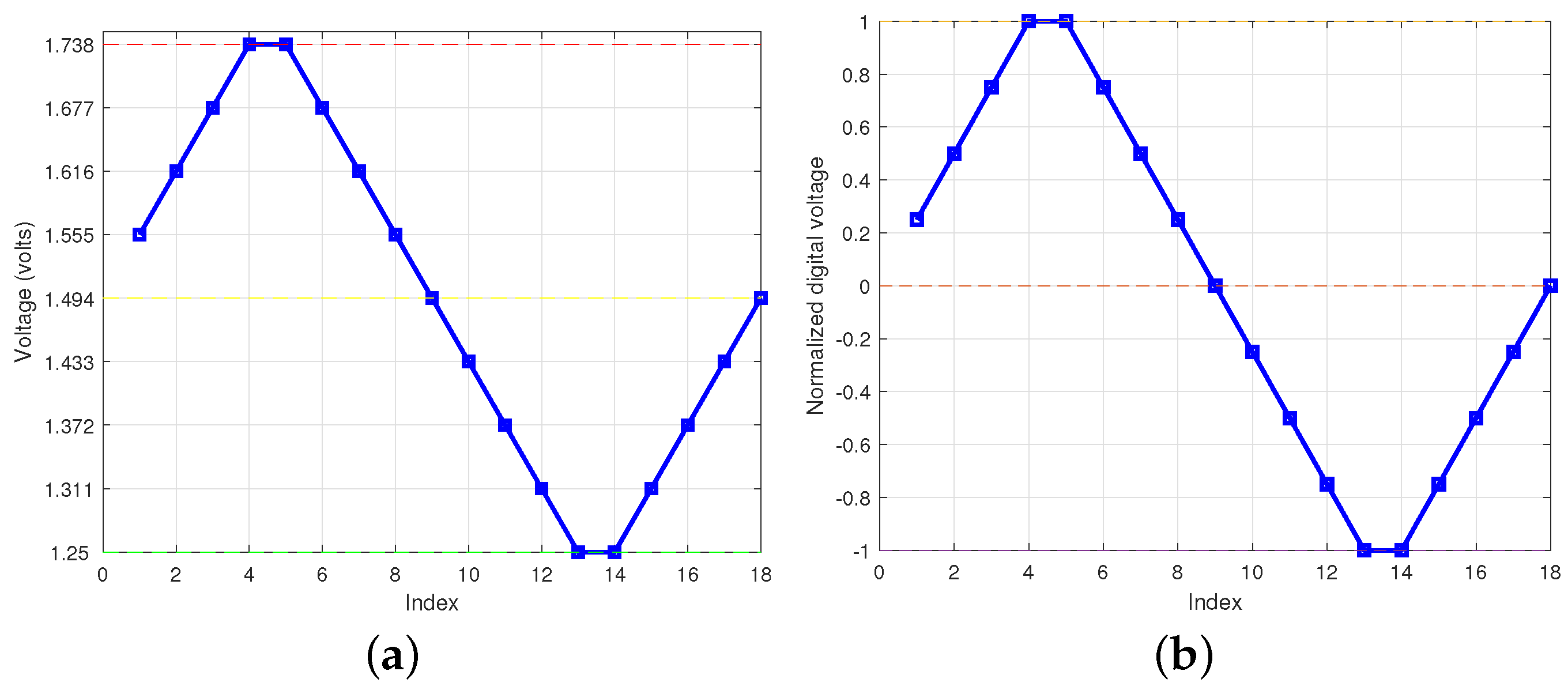
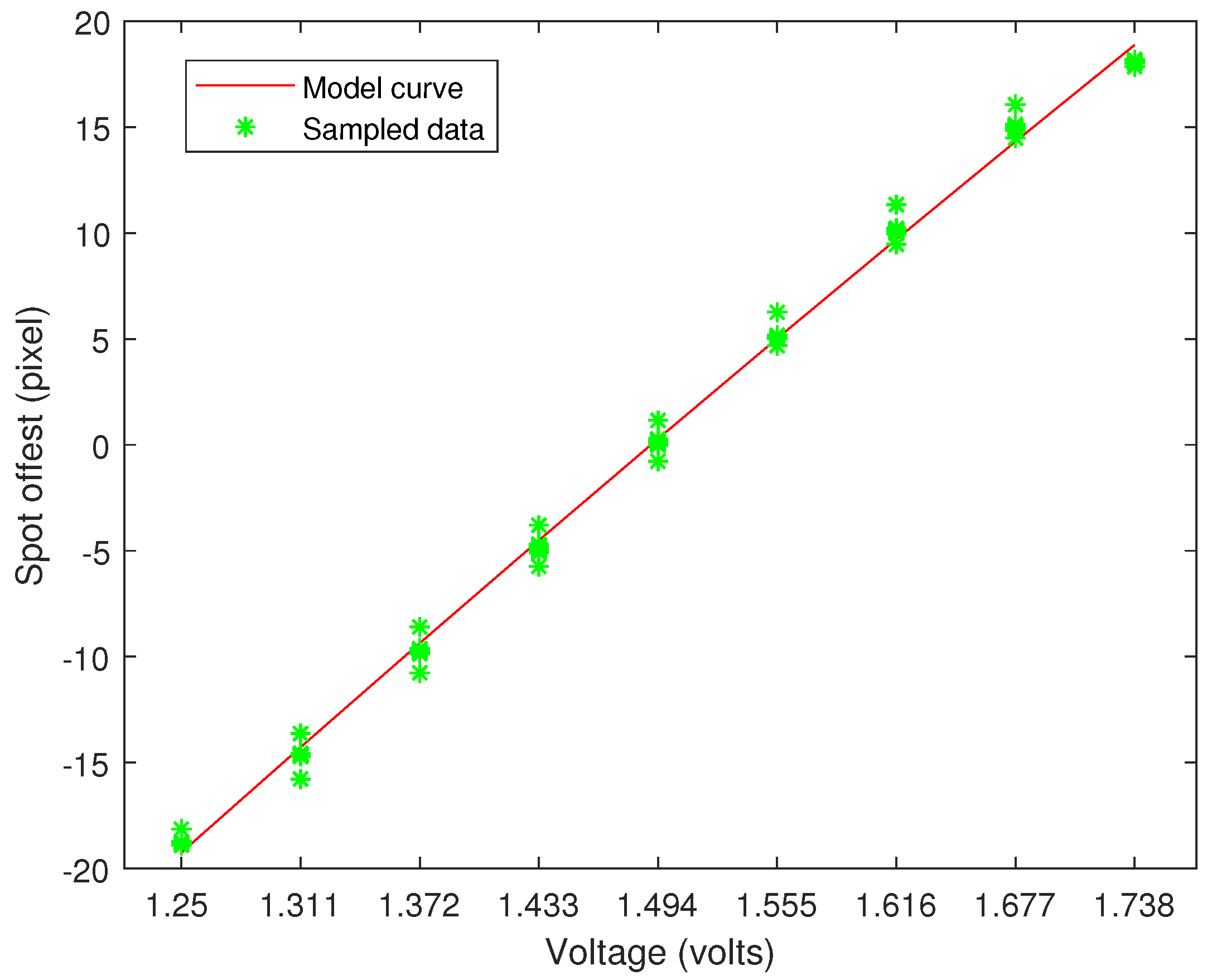
4.1. Calibration Modeling
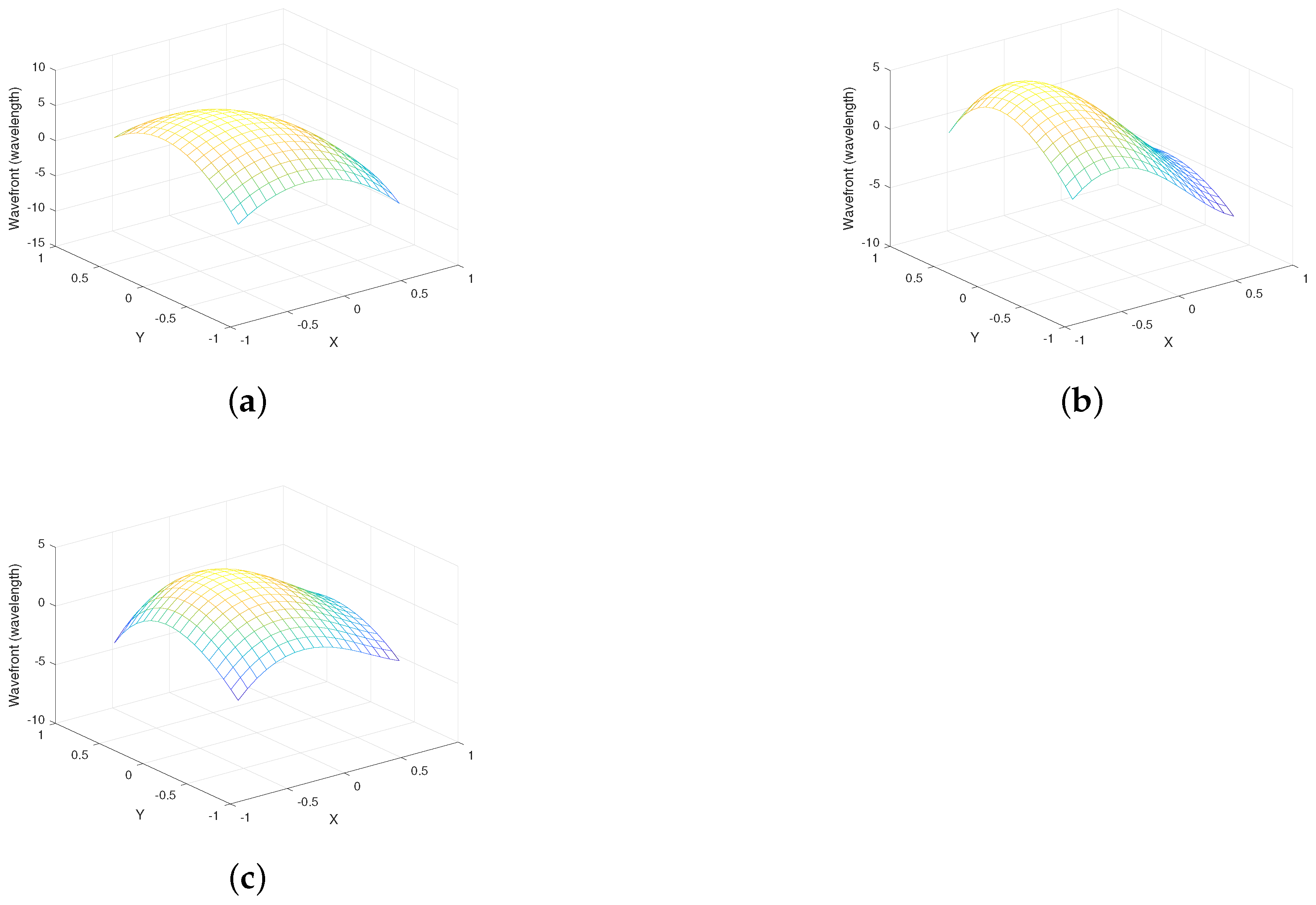
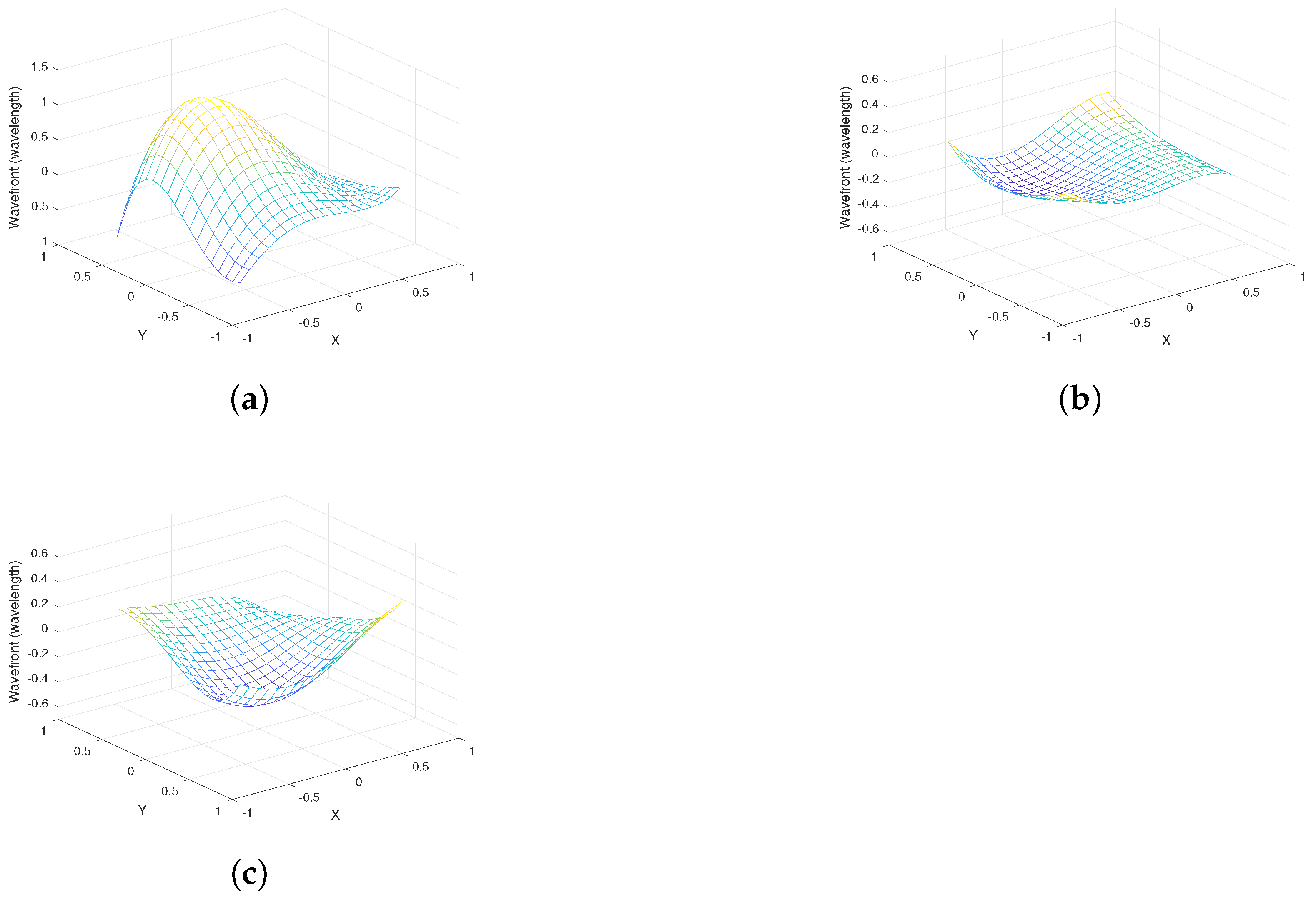
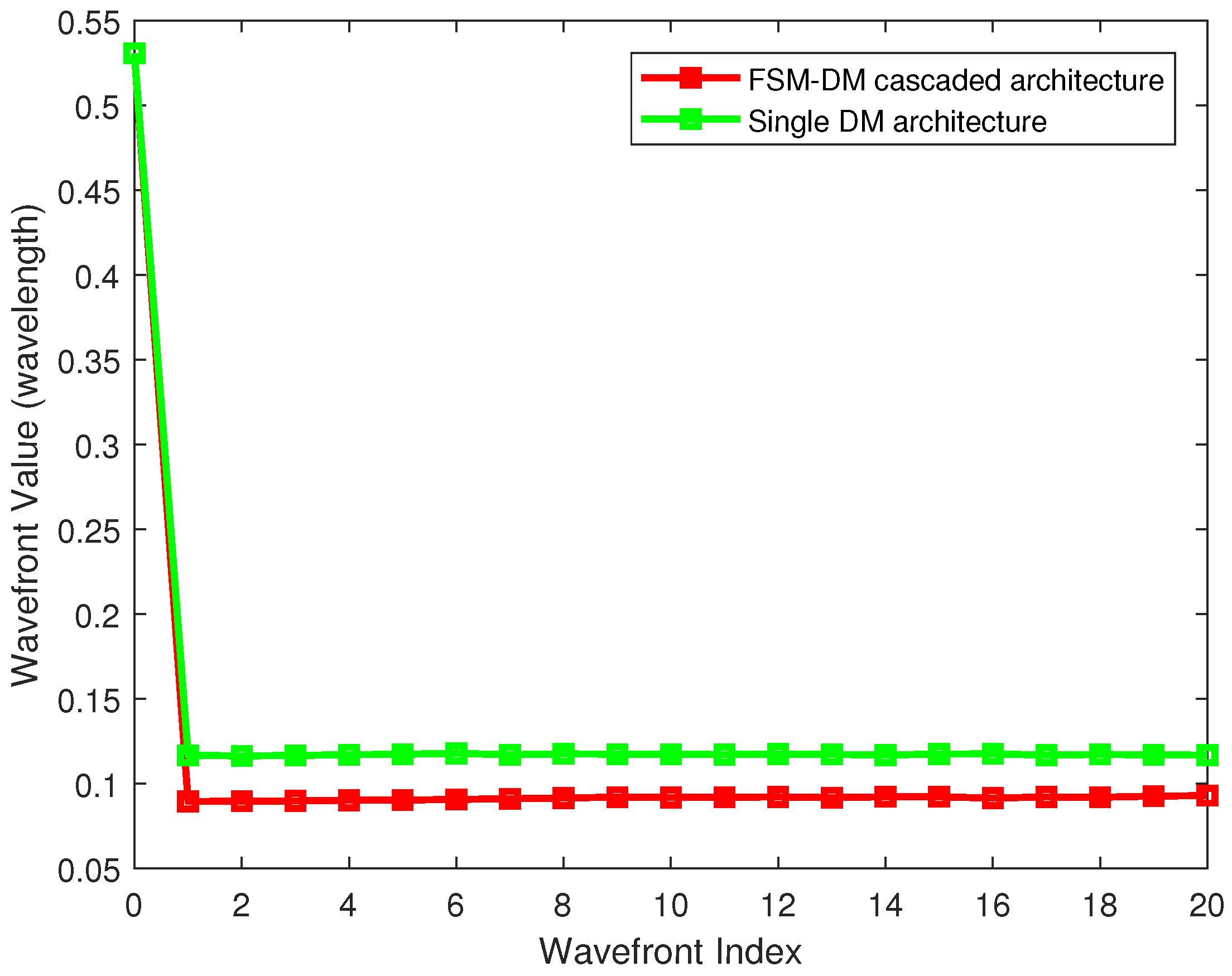
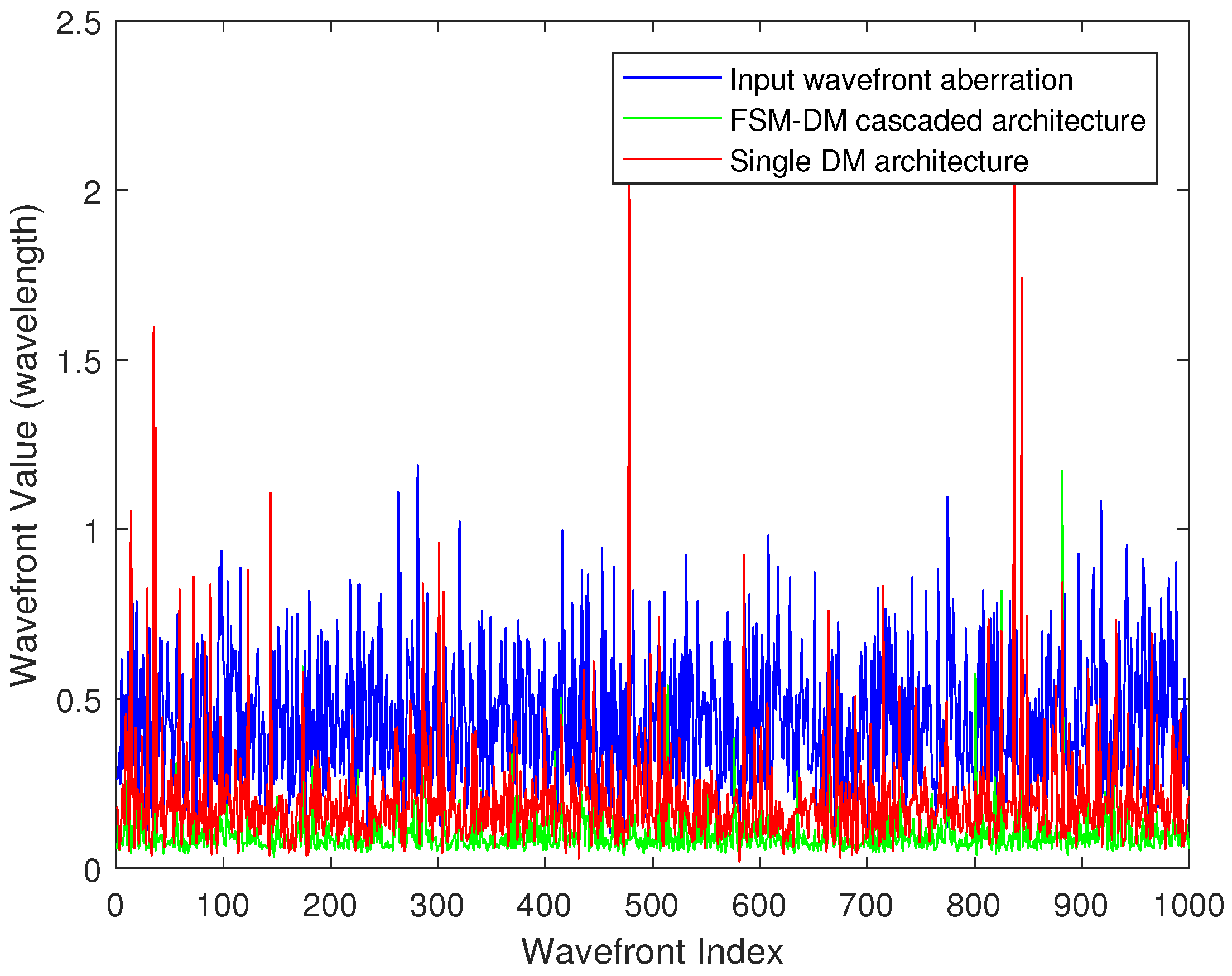
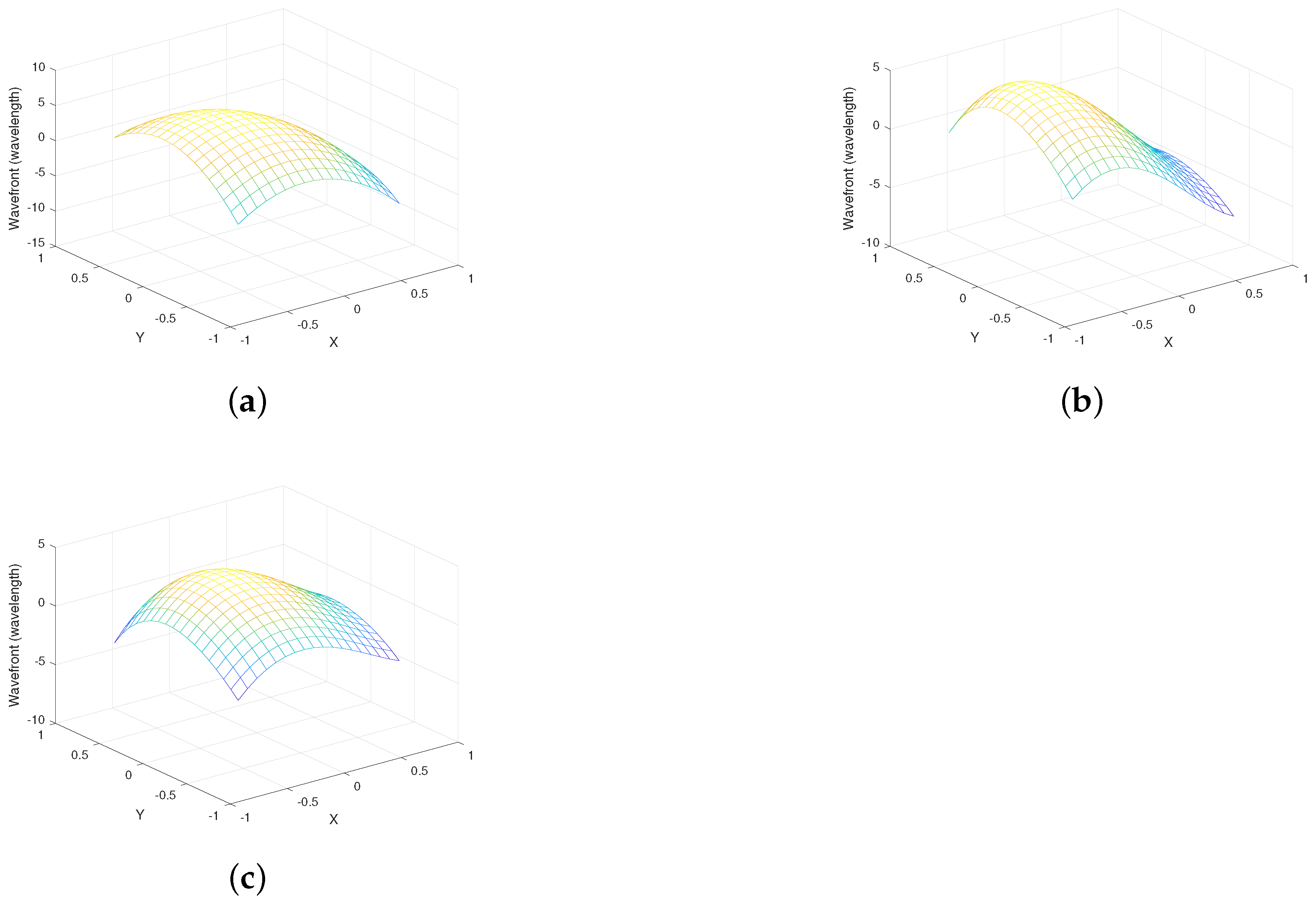
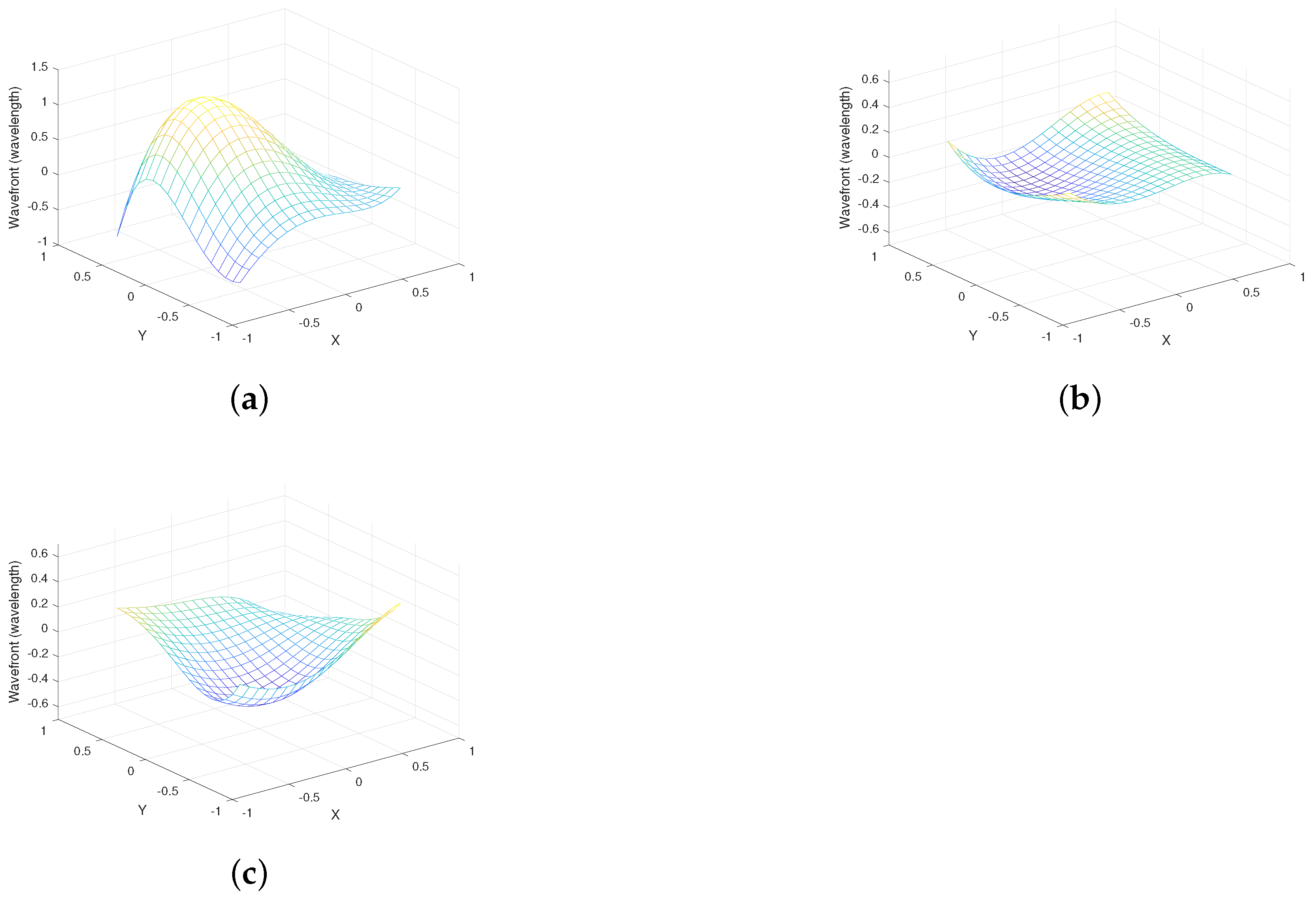
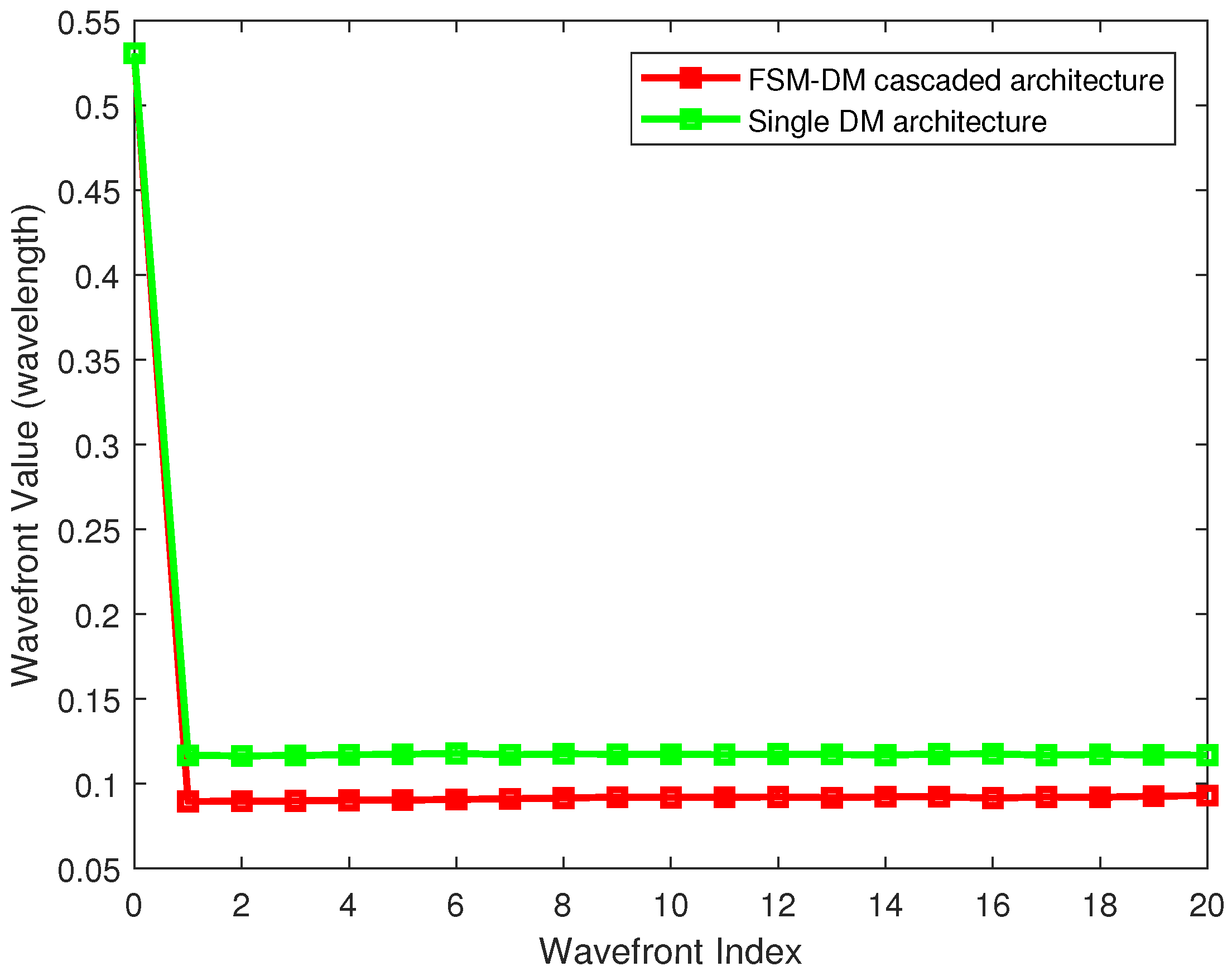
4.2. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khalighi, M.A.; Uysal, M. Survey on Free Space Optical Communication: A Communication Theory Perspective. IEEE Commun. Surv. Tutor. 2014, 16, 2231–2258. [Google Scholar] [CrossRef]
- Tian, Y.; Zhong, J.; Lin, X.; Xiao, P.; Yang, H.; Zhong, Y.; Kang, D. High-dynamic wavelength tracking and millimeter-level ranging inter-satellite laser communication link with feedback-homodyne detection. Appl. Opt. 2019, 58, 5687–5694. [Google Scholar] [CrossRef] [PubMed]
- Zhu, X.; Kahn, J.M. Free-space optical communication through atmospheric turbulence channels. IEEE Trans. Commun. 2002, 50, 1293–1300. [Google Scholar] [CrossRef]
- Andrews, L.C.; Phillips, R.L. Society of Photo-optical Instrumentation Engineers. In Laser Beam Propagation through Random Media; SPIE: Bellingham, WA, USA, 2005. [Google Scholar]
- Weyrauch, T.; Vorontsov, M. Free-space laser communications with adaptive optics: Atmospheric compensation experiments. J. Optic. Commun. Rep. 2004, 1, 355–379. [Google Scholar] [CrossRef]
- Tyson, R.K. Bit-error rate for free-space adaptive optics laser communications. J. Opt. Soc. Am. A 2002, 19, 753–758. [Google Scholar] [CrossRef] [PubMed]
- Gregory, M.; Troendle, D.; Muehlnikel, G.; Heine, F.; Meyer, R.; Lutzer, M.; Czichy, R. Three years coherent space to ground links: Performance results and outlook for the optical ground station equipped with adaptive optics. In Proceedings of the Free-Space Laser Communication and Atmospheric Propagation XXV, San Francisco, CA, USA, 2–7 February 2013; Volume 8610, pp. 17–29. [Google Scholar] [CrossRef]
- Roberts, W.T.; Antsos, D.; Croonquist, A.; Piazzolla, S.; Roberts, L.C., Jr.; Garkanian, V.; Trinh, T.; Wright, M.W.; Rogalin, R.; Wu, J.; et al. Overview of Ground Station 1 of the NASA space communications and navigation program. In Proceedings of the Free-Space Laser Communication and Atmospheric Propagation XXVIII, San Francisco, CA, USA, 13–18 February 2016; Volume 9739, pp. 82–99. [Google Scholar] [CrossRef]
- Petit, C.; Vedrenne, N.; Michau, V.; Artaud, G.; Issler, J.-L.; Samain, E.; Toyoshima, M.; Akioka, M.; Kolev, D.; Munemasa, Y.; et al. Adaptive optics results with SOTA. In Proceedings of the 2015 IEEE International Conference on Space Optical Systems and Applications (ICSOS), New Orleans, LA, USA, 26–28 October 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Ezhov, V.; Vasilieva, N.; Ivashkin, P.; Galstian, A. Toward a locally adaptive optical protection filtering for human eyes and technical vision sensors. Appl. Opt. 2020, 59, B1–B9. [Google Scholar] [CrossRef]
- Ma, J.; Li, Y.; Yu, Q.; Yang, Z.; Hu, Y.; Chu, J. Generation of High-Quality Tunable Airy Beams with an Adaptive Deformable Mirror. Opt. Lett. 2018, 43, 3634–3637. [Google Scholar] [CrossRef]
- Booth, M. Adaptive optical microscopy: The ongoing quest for a perfect image. Light Sci. Appl. 2014, 3, e165. [Google Scholar] [CrossRef]
- Ruppel, T.; Dong, S.; Rooms, F.; Osten, W.; Sawodny, O. Feedforward Control of Deformable Membrane Mirrors for Adaptive Optics. IEEE Trans. Control Syst. Technol. 2013, 21, 579–589. [Google Scholar] [CrossRef]
- Dayton, D.; Pierson, B.; Spielbusch, B.; Gonglewski, J. Atmospheric structure function measurements with a Shack–Hartmann wave-front sensor. Opt. Lett. 1992, 17, 1737–1739. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, X.; Cao, Z.; Zhang, X.; Liu, C.; Mu, Q. Gradient cross-correlation algorithm for scene-based Shack-Hartmann wavefront sensing. Opt. Express 2018, 26, 17549–17562. [Google Scholar] [CrossRef] [PubMed]
- Nam, J.; Thibos, L.N.; Bradley, A.; Himebaugh, N.; Liu, H. Forward light scatter analysis of the eye in a spatially-resolved double-pass optical system. Opt. Express 2011, 19, 7417–7438. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.M.; Leach, J.; Gong, L.Y.; Ding, J.; Zheng, B.Y. Aberration corrections for free-space optical communications in atmosphere turbulence using orbital angular momentum states. Opt. Express 2012, 20, 452–461. [Google Scholar] [CrossRef] [Green Version]
- Dalimier, E.; Dainty, C. Comparative analysis of deformable mirrors for ocular adaptive optics. Opt. Express 2005, 13, 4275–4285. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Wang, C.; Zheng, L.; Cai, J.; Ding, Y. Measurement of interactive matrix and flat-surface calibration of OKO 109-channel deformable mirror using ZYGO-GPI interferometer. In Proceedings of the Optical Metrology and Inspection for Industrial Applications VII, Online, 11–16 October 2020; Volume 11552, pp. 363–366. [Google Scholar] [CrossRef]
- Ma, J.; Chen, K.; Chen, J.; Li, B.; Chu, J. Closed-loop correction and ocular wavefronts compensation of a 62-element silicon unimorph deformable mirror. Chin. Opt. Lett. 2015, 13, 042201. [Google Scholar]
- Vdovin, G. Closed-loop adaptive optical system with a liquid mirror. Opt. Lett. 2009, 34, 524–526. [Google Scholar] [CrossRef] [PubMed]
- Ran, B.; Yang, P.; Wen, L.; Du, R.; Yang, K.; Wang, S.; Xu, B. Design and analysis of a reactionless large-aperture fast steering mirror with piezoelectric actuators. Appl. Opt. 2020, 59, 1169–1179. [Google Scholar] [CrossRef]
- Zou, W.; Qi, X.; Burns, S.A. Wavefront-aberration sorting and correction for a dual-deformable-mirror adaptive-optics system. Opt. Lett. 2008, 33, 2602–2604. [Google Scholar] [CrossRef] [Green Version]
- Zou, W.; Qi, X.; Burns, S.A. Woofer-tweeter adaptive optics scanning laser ophthalmoscopic imaging based on Lagrange-multiplier damped least-squares algorithm. Biomed. Opt. Express 2011, 2, 1986–2004. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Ke, X. Experimental study on adaptive optical wavefront correction with dual mirrors in free space optical communication. Optik 2021, 242, 167146. [Google Scholar] [CrossRef]
- Hu, S.; Xu, B.; Zhang, X.; Hou, J.; Wu, J.; Jiang, W. Double-deformable-mirror adaptive optics system for phase compensation. Appl. Opt. 2006, 45, 2638–2642. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Dong, L.; Yang, P.; Lei, X.; Yan, H.; Xu, B. A Zernike mode decomposition decoupling control algorithm for dual deformable mirrors adaptive optics system. Opt. Express 2013, 21, 23885–23895. [Google Scholar] [CrossRef] [PubMed]
- Kong, L.; Cheng, T.; Yang, P.; Wang, S.; Yang, C.; Zhao, M. Decoupling control algorithm based on numerical orthogonal polynomials for a woofer-tweeter adaptive optics system. Opt. Express 2021, 29, 22331–22344. [Google Scholar] [CrossRef] [PubMed]
- Yu, W.; Zhong, J.; Chen, G.; Mao, H.; Yang, H.; Zhong, Y. Wavefront correction algorithm based on a complete second-order DM-SHWS model for free-space optical communications. Appl. Opt. 2021, 60, 4954–4963. [Google Scholar] [CrossRef]
- Zhu, L.; Sun, P.; Bartsch, D.; Freeman, W.R.; Fainman, Y. Adaptive control of a micromachined continuous-membrane deformable mirror for aberration compensation. Appl. Opt. 1999, 38, 168–176. [Google Scholar] [CrossRef]
- Southwell, W.H. Wave-front estimation from wave-front slope measurements. J. Opt. Soc. Am. 1980, 70, 998–1006. [Google Scholar] [CrossRef]
- Roddier, N. Atmospheric wavefront simulation and Zernike polynomials. Opt. Eng. 1990, 29, 1174–1180. [Google Scholar]
- Zhang, Y.; Zhong, J.; Yu, W.; Chen, G.; Guo, P. A hybrid spatial-temporal laser beam wavefront emulator with flexible resolution. In Proceedings of the IEEE International Conference on Space Optical Systems and Applications, Portland, OR, USA, 14–16 October 2019. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, H.; Zhong, J.; Yu, S.; Xiao, P.; Yang, X.; Lu, G. An Atmospheric Turbulence Compensation Algorithm Based on FSM-DM Cascaded AO Architecture for FSO Communications. Network 2022, 2, 270-287. https://doi.org/10.3390/network2020018
Mao H, Zhong J, Yu S, Xiao P, Yang X, Lu G. An Atmospheric Turbulence Compensation Algorithm Based on FSM-DM Cascaded AO Architecture for FSO Communications. Network. 2022; 2(2):270-287. https://doi.org/10.3390/network2020018
Chicago/Turabian StyleMao, Hongliang, Jie Zhong, Siyuan Yu, Pei Xiao, Xinghao Yang, and Gaoyuan Lu. 2022. "An Atmospheric Turbulence Compensation Algorithm Based on FSM-DM Cascaded AO Architecture for FSO Communications" Network 2, no. 2: 270-287. https://doi.org/10.3390/network2020018
APA StyleMao, H., Zhong, J., Yu, S., Xiao, P., Yang, X., & Lu, G. (2022). An Atmospheric Turbulence Compensation Algorithm Based on FSM-DM Cascaded AO Architecture for FSO Communications. Network, 2(2), 270-287. https://doi.org/10.3390/network2020018