1. Introduction
Ordinary differential equations are widely used in science, mathematical modeling, physics, biology, and other fields. For students, this is another stage of mathematical learning, after elementary algebra, geometry and different types of equations. Differential equations, considered as models of natural and industrial processes, can catch dynamics, and show the development, and evolution of modeled processes. The theory of ordinary differential equations, when taught to students, starts with linear ones. There is well developed theory, which provides almost exhaustive answers to questions and problems concerning linear ODE with constant coefficients. For equations with coefficients, depending on an independent variable, the theory provides knowledge of the structure of a set of solutions and definitions of the main properties of solutions. When passing to nonlinear ODE, many principal concepts are lost, for instance, the superposition principle and extendability of solutions to infinity (for regular linear equations, without singularities). For practical purposes, numerical analysis often can be performed, and it is sufficient to find solutions. However, sensitive dependence of solutions to the initial data occurs often in practical problems and in theoretical studies of nonlinear ODE.
It can make difficult or even impossible the numerical study. In this article we attract attention to the occurrence of this and similar problems even in the study of relatively simple linear and nonlinear ODE. For this, we have chosen the theory of conjugate points, as developed in the works of W. Leighton, Z. Nehari [
1], M. Hanan [
2], T. Sherman [
3], V. Kondrat’ev [
4,
5], etc. We would like to mention also the works by S. Smirnov [
6,
7], who has found interesting properties of solutions of the third order nonlinear ODE and applications to boundary value problems, as well as findings of I. Astashova et al. [
8], concerning the asymptotic properties of solutions. The third order equations with deviating arguments were considered in [
9,
10]. The sensitive dependence of solutions on the initial data is of permanent interest [
11].
A few words about the conjugate points. The first order linear ODE of the type have no surprises, if the coefficients are continuous functions. The second order linear ODE of the form are more intriguing. They can exhibit oscillatory behavior of solutions, and a lot of problems arise. It is firm, however, that the oscillatory behavior of solutions is intuitively connected to zeros, and the rate of oscillation can be measured by the number of zeros.
When passing to linear equations of order three, and higher, the notion of a zero of a solution becomes more complicated. There are multiple zeros, that is, zeros for a solution, and some of its derivatives. Nevertheless, the rate of oscillation of some classes of linear ODE of higher orders can be measured, introducing the notion of conjugate points. Definitions for the third order linear equations are provided below, following the work by M. Hanan, who, in turn, used the theory of conjugate points for classes of linear equations of order four, developed earlier by W. Leighton and Z. Nehari. The definition of conjugate points for the third order linear equations seems to be tricky since it uses the extremality property of zeros and leads to the concept of an extremal solution. Further analysis of these definitions simplifies the problem and results in the efficient criteria for finding conjugate points, as in Theorem 1. So conjugate points for some classes of equations of order higher than two, play the same role as ordinary zeros play for the second order equations. So there are conjugate points, and there are the so called extremal solutions, attributed to them. In this article we provide some additional information on the theory of conjugate points for linear ODE of order three. The structure of extremal solutions is revealed, and their remarkable properties are discussed. Namely, the mutual location of extremal solutions is described and, among others, the sensitive dependence of extremal solutions on the initial conditions is discussed.
The second part of the article concerns the nonlinear equations of the Emden-Fowler type, which in some sense, behave similarly to linear equations, considered in
Section 2 and
Section 3. Both the analytical approach and the numerical study are used. Some results in the literature, concerning nonlinear equations, are reminded and their consequences to extremal solutions for the Emden-Fowler type equations are formulated.
Consider the linear equation
where
is a positive valued continuous function. This equation was studied by many authors; we will mention the works [
2,
4,
5], books [
12,
13,
14,
15].
The theorem by M. Hanan [
2] states that there exist special solutions
with
which have a double zero at some point
These points form ascending sequence and are called by conjugate points to
for equations of the form (
1). These points can be visualized considering the equation
We recall the structure of a set of solutions to equations of the type (
1) and discuss what happens under passage to nonlinear equations
2. Linear Equation
W. Leighton and Z. Nehari [
1] have investigated oscillatory properties of solutions to linear equations of the form
where
is a continuous positive (or negative) valued function. To measure the rate of oscillation of Equation (
5) they introduced the notion of conjugate points. Similar task was accomplished by M. Hanan [
2] who studied the third order linear differential equations
with continuous coefficients. The conjugate points for the Equation (
6) were introduced in the following way. Suppose that Equation (
6) has a solution
which vanishes at
and has at least
zeros
in
Then
is called ([
2], p. 920) the
n-th conjugate point to
with respect to Equation (
6) if it is a smallest possible value of
as
ranges over all possible solutions of (
6) for which
Due to this extremality property of a conjugate point the solution which produces the
n-th conjugate point is called the
n-th extremal solution.
To get description of conjugate points the following characterization of linear equations was introduced.
Definition 1 ([
2]).
Equation (6) is said to be of Class I if any its solution for which and is positive for . Definition 2 ([
2]).
Equation (6) is said to be of Class II if any its solution for which and is positive for . There are equations that belong to both classes (for instance, ) and there exist equations (for example, ) that are neither of Class I nor of Class II.
Several criteria for Equation (
6) to be of Class I or Class II are given in [
2,
12,
13] of which we mention only the simplest one. Namely, Equation (
1) is of Class I if
and of Class II if
The characterization of conjugate points for equations of Class I and Class II was given by M. Hanan [
2] (theorems 2.6, 2.7 and 4.4).
Theorem 1. Conjugate points of an equation of Class I are the zeros (which are simple) of the so called principal solution, that is the solution which satisfies the initial conditions Conjugate points (if any) of an equation of Class II form ascending sequenceThe respective extremal solutions () have a simple zero at double zero at (that is, ) and exactly simple zeros in The first part of the above statement is Theorem 2.6 in [
2] and the second one is Theorem 2.7 in the same source.
From now consider Equation (
1) with positive
They belong to Class II. It is an easy matter to show that nontrivial solutions of (
1) with the initial conditions
or
do not vanish for
So any extremal solution
satisfies (up to multiplication by
) the conditions
It is convenient to attribute the angle
to the extremal solution.
Studying the properties of these angles have led us to the following result.
Theorem 2. For a linear equation of Class II:
(1) the angles corresponding to the extremal solutions are arranged as (2) solutions defined by the initial conditionshave for exactly simple zeros, and solutions defined by the initial conditionshave for exactly simple zeros ( means and is set to zero). Proof. We consider extremal solutions for which the first order derivative at is positive, and the second order derivative is negative. Taking into account that all zeros of an extremal function in the interval are simple, and changes sign at each of them, we conclude that is positive for if k is odd, and it is negative for the same t if k is even.
Let us compare two extremal solutions with odd numbers. We wish to show that if Suppose that and comparison is made only for the second order derivatives at This is possible always, since extremal solutions can be multiplied by a constant, and this does not change the corresponding angle By Theorem 1, For both extremal functions are positive. Let us show that the assumption or, which is the same, leads to contradiction. Note, that the case is excluded, since then both extremal solutions must coincide, by the unique solvability of the Cauchy problems. Consider the difference The function is a solution of the same equation with the initial conditions Therefore for since the equation is of Class II, and any solution with positive is positive to the right of a double zero. However, this contradicts the fact that
It can be proved similarly, that if
Let us show now, that for any positive integers k and We assume that and Consider the function Since has a double zero at and by assumption, is positive for Two cases are possible. The first one, Then One has that This is in contradiction with positivity of for The second possible case, Then One has that The contradiction with positivity of for is obtained again.
The first statement of the theorem is proved.
Let us pass to the second statement. Consider a solution
which vanishes at
and is defined by the angle
Let us compare this solution with the extremal solutions
and
provided that the first derivatives of all three solutions at
are equal. The functions
and
are positive for
It follows that
for
Denote simple zeros of the function
in the interval
by
and simple zeros of the function
by
Consider the relative locations of zeros
and
For even
i the function
is positive in
and the function
is positive in
(we accept that
). Show that
for
If this is not the case, then there exists an interval
with even
i such that
for
Then, by Lemma 2 in [
1], there exists a number
such that the function
has a double zero in the interval
Since the function
is a solution of Class II, it does not vanish for
On the other hand, the number
is positive, since otherwise
for
what contradicts the existence of a zero in this interval. Then
because the first addend is zero, and
But
since the second addend is zero, and
is positive for
Therefore, the function
changes sign in the interval
which lies to the right of
The obtained contradiction means that any interval
where the function
is positive, contains a subinterval
where the function
is positive. We have proved that zeros of the functions
and
are arranged as
It follows from the inequalities
which are valid for
that in any interval
there exists a zero of
Thus the function
has in the interval
totally
zeros, and
It follows that there exists an extra zero in the interval
and the number of zeros of
in
is not less than
At the same time, the function
cannot have more zeros. If it had more, then it had more by two zeros at least. Then the minimal number of zeros in the interval
would be
Since
this would contradict the choice of
as the minimal
-th zero over all solutions, vanishing at
(recall the “extremal” definition of a conjugate point above). The conclusion is that
has exactly
zeros for
The proof for solutions, defined by the inequalities can be conducted in a similar way. □
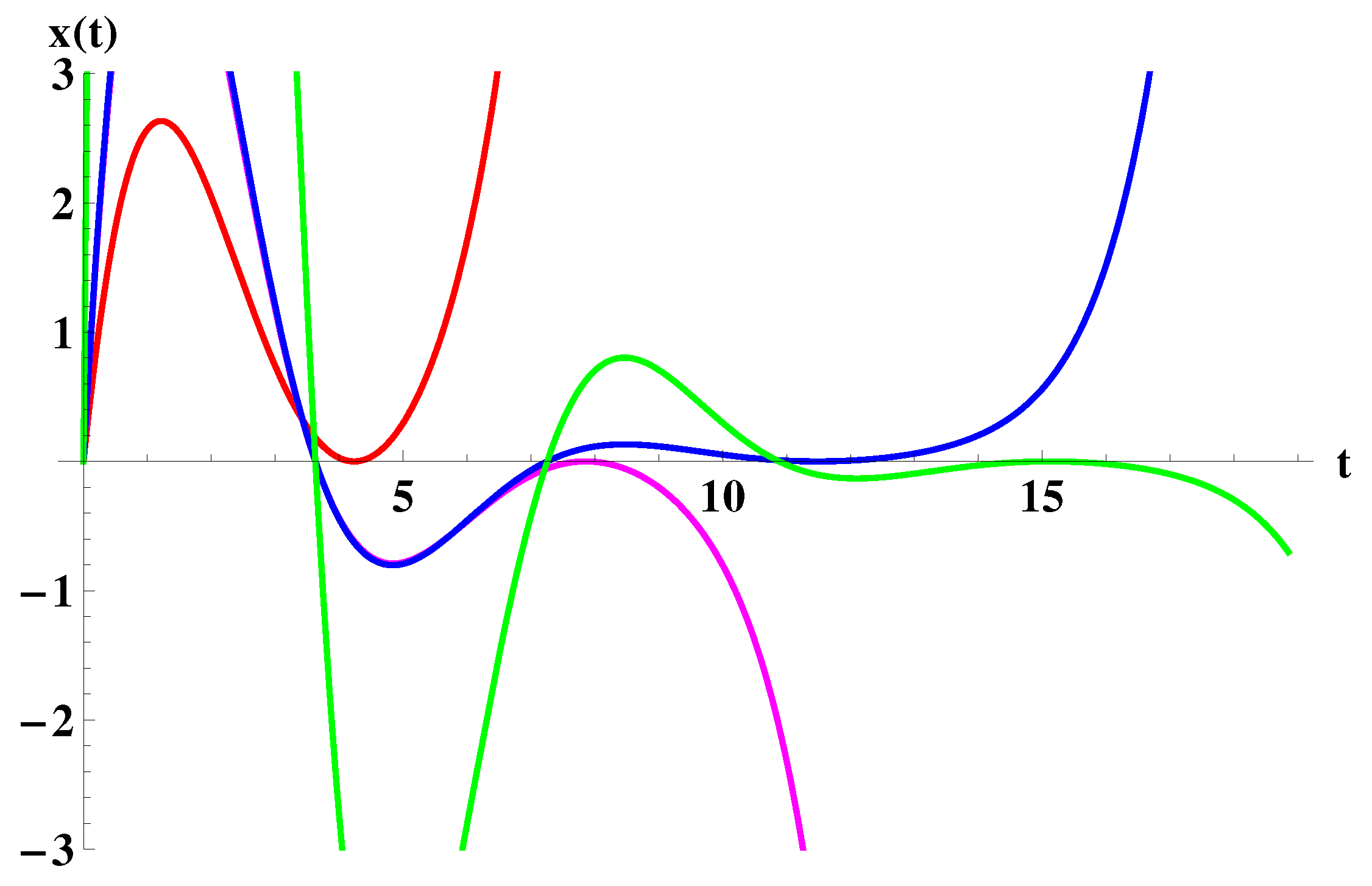
Consider, for instance, the equation
which has a general solution
Solutions that vanish at
are
In order to find solutions that are zero at
and have double zeros to the right of
consider the system (with respect to the unknowns
and
)
This system can have nontrivial solutions
and
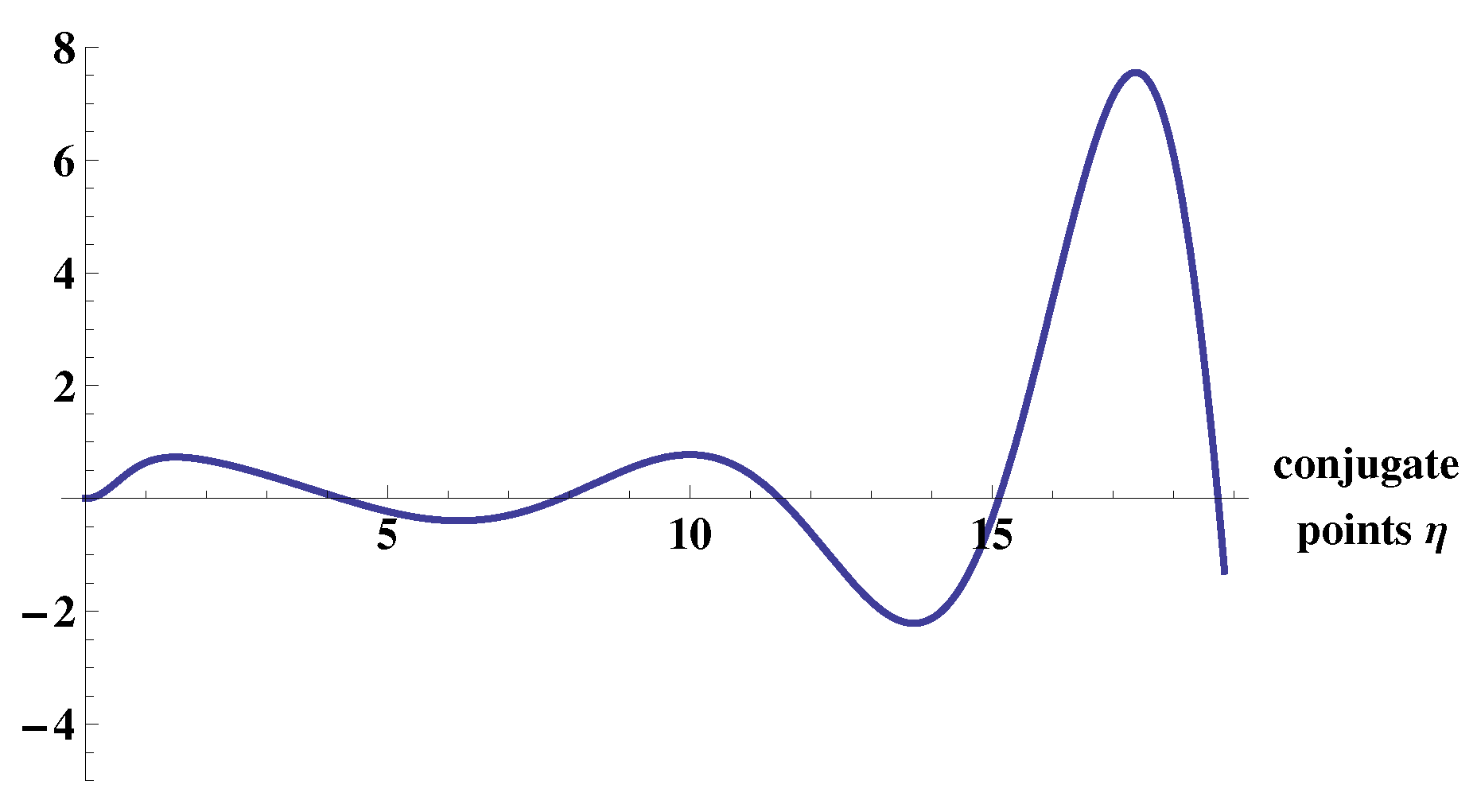
only if the coefficient determinant is zero. Therefore we get the equation to find the conjugate (to
) points
The graph (appropriately scaled to fit the area) of the function on the left side is depicted in
Figure 1.
Conjugate points to of equation coincide with conjugate points to of the adjoint equation The conjugate points of the equation are exactly the zeros (all of them are simple zeros) of a solution that satisfies the initial conditions
First four extremal solutions (with respect to
) for Equation (
9) are depicted in
Figure 2.
The angles
that define the initial values for extremal solutions
are arranged
The respective extremal solutions
are defined then as
The extremal solutions expressed in terms of conjugate points
Below the
are given (rounded to 12 digits) for the first six extremal solutions
The sequences
and
tend from below and from above respectively to the angle
The particular solution defined by the angle
is
This is oscillatory solution with equidistant zeros.
The convergence is rapid and therefore the extremal solutions are hardly detectable numerically.
4. Emden Fowler Type Equations
Consider equations of the type
for
These equations exhibit generally the same behavior as the linear one with the exception that all solutions that eventually tend to infinity
do so in finite time.
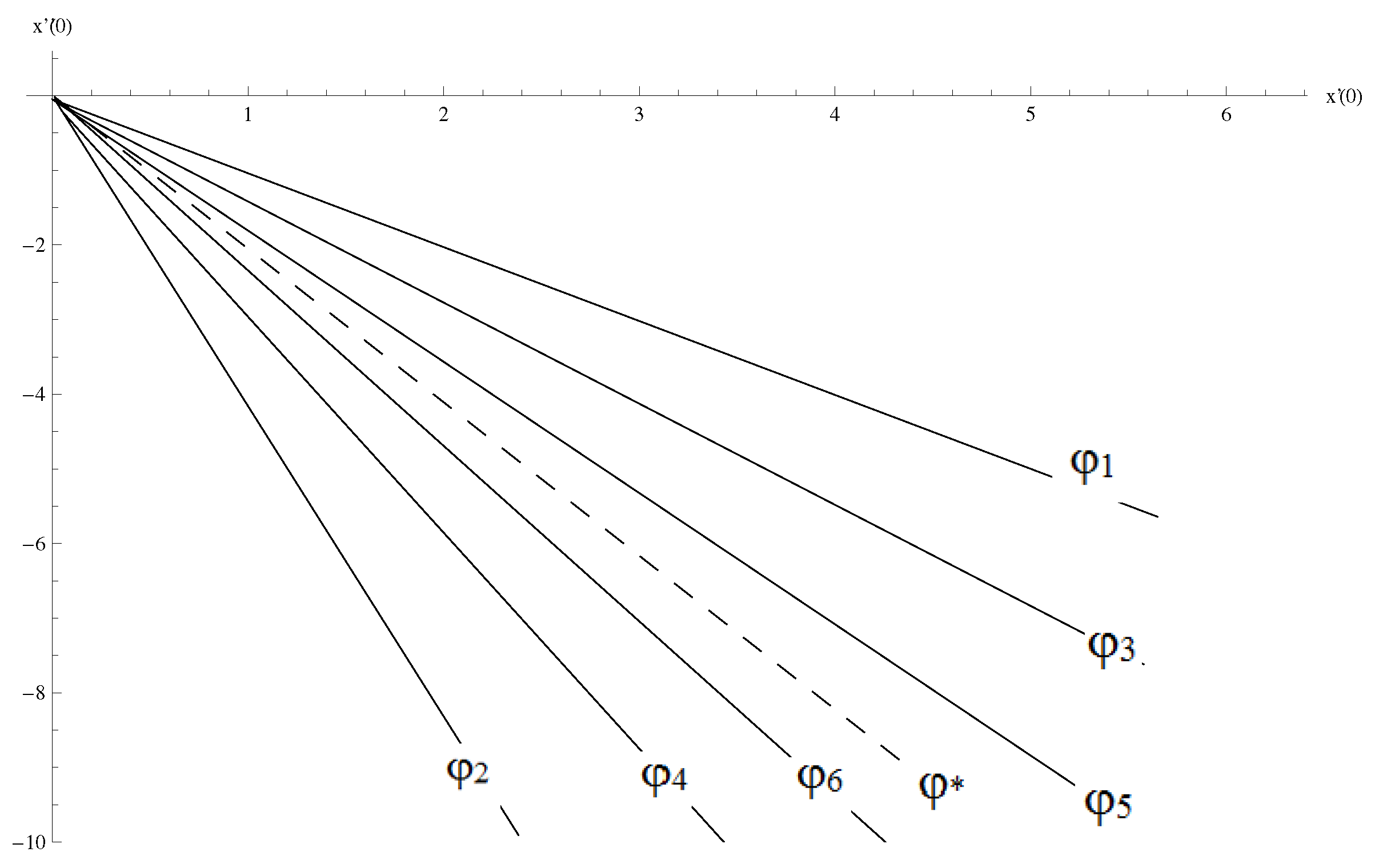
It can be proved that the plane of the initial data
looks generally as that for the linear case (
Figure 4).
Instead of straight lines defined by angles
in
Figure 4 there are curves
that are still arranged in two sequences converging to a specific branch
This branch contains the initial data (namely,
and
) for extendable and oscillatory solutions that have not double zeros.
Generally, the following is true for solutions of (
17) that vanish at
There exists a one-dimensional branch of the initial conditions
that extends to the 4-th quadrant of the
-plane (
) and possesses the property: any solution of
is positive in the interval
, has a double zero at
and is positive for
In the case of a linear equation (
in (
17)) this branch is the straight line marked as
in
Figure 4. Similar suggestions can be stated for other branches.
Lemma 1. Any solution of an Equation (17) with the initial conditionsremains positive for Similarly, any solution with the conditionsremains negative for Proof. Let (
19) hold. Then one of the values
or
is positive and
is positive also in some right neighborhood
of the point
Suppose
Then
for some
and
for some
This is impossible, however, since
and
whenever
is positive, namely,
for
Similarly
for
if (
20) holds. □
Lemma 2. Let x and y be solutions of an Equation (17) with the initial conditions Then for
Proof. Write (
17) as
where
Notice that
for
Consider the difference
One has that
where
is some intermediate value. The function
satisfies
Since linear Equation (
22) is of Class II (recall that
),
for
as long as both solutions exist. Hence the proof. □
Consider Equation (
17) with
and
Theorem 3. For any there exist branches () of the initial values possessing the properties:
(1) locate in the quadrant of the -plane;
(2) emanate from the origin and extend to infinity;
(3) are ordered asin the meaning that any vertical line crosses branches in indicated order; (4) solutions of Equation (17) subject to the initial conditions () have exactly simple zeros in the interval and a double zero at (different η for different x); (5) solutions of Equation (17) subject to the initial conditions () have exactly i simple zeros in the interval and a double zero at (different η for different x); (6) solutions defined by the initial conditionshave for exactly simple zeros, and solutions defined by the initial conditionshave for exactly simple zeros ( means semi-axis and means ). Proof. Fix and consider a quarter of a circle of radius R in the -plane lying in the 4-th quadrant ( ). Parameterize the arc by the angle that takes values in the interval Due to Lemma 1 a solution with the initial conditions or, equivalently is positive for A solution with the initial conditions or, equivalently is negative for .
Denote solutions of Equation (
17) satisfying the initial conditions
by
Solutions
continuously change together with
Let decrease from zero. For small (in modulus) solutions are positive for Let Such a value exists since solutions for are negative. A solution has a zero, otherwise it is positive in the interval of definition. This zero (denote it ) must be double zero (). If it is simple () then there exists some with the same extremal property and this contradicts the definition of Next solutions with less than but close to it can be considered. They have simple zeros (by Lemma 2) and are positive for The lower bound of for solutions with this property yields Proceeding in this way we can obtain for any number i.
Considering solutions starting from we obtain solutions with a double zero at and so on. These solutions are negative eventually. For instance, set A solution has a zero at some point This zero must be double one, due to the extremal property (simple zero is not allowed).
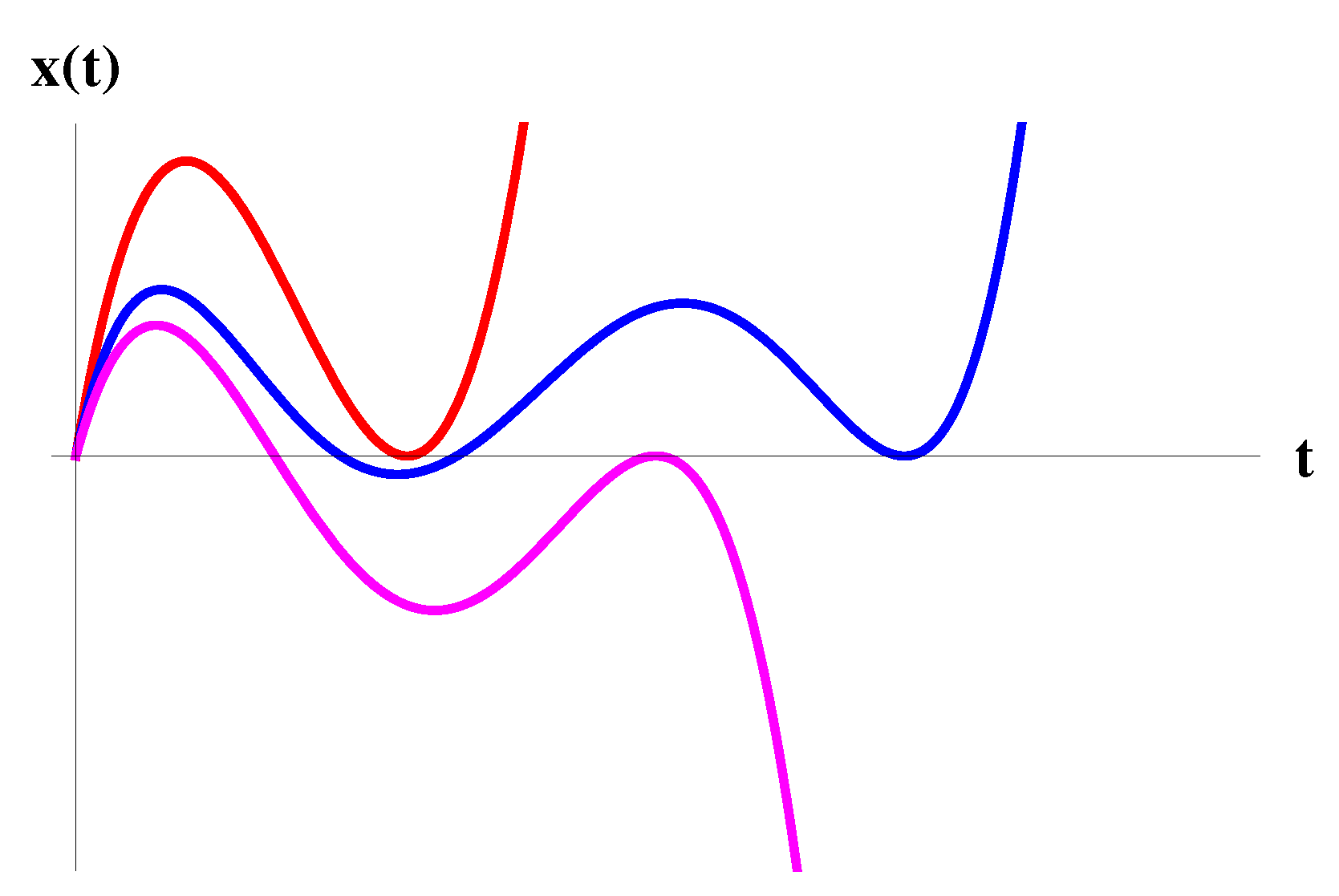
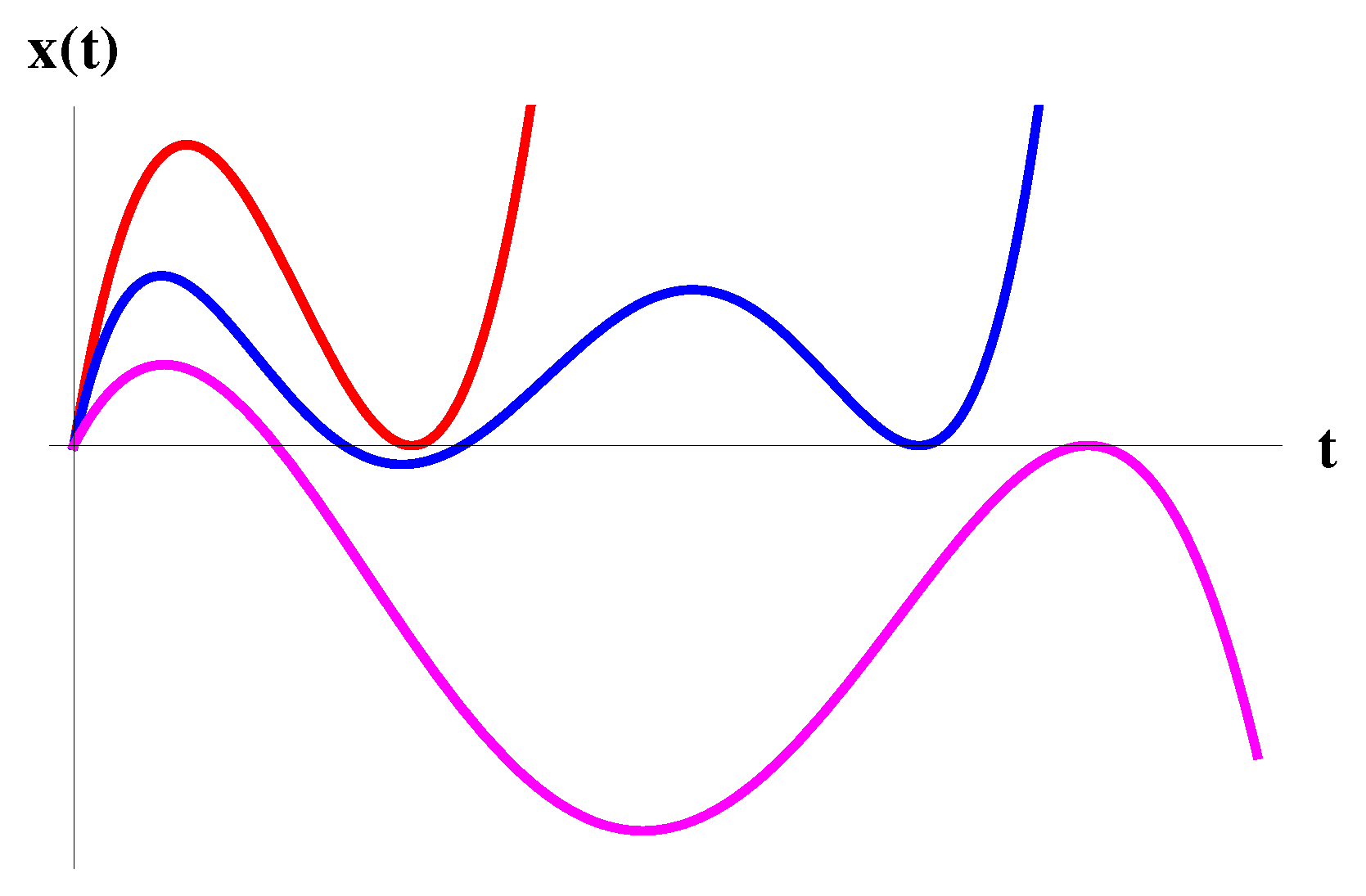
By construction,
and, similarly,
It can be shown that odd and even
alternate. Look at
Figure 5,
Figure 6 and
Figure 7. If solutions
and
with
behave like in
Figure 5 then “between” “blue” and “magenta” solutions there exists a solution with the first double zero
This contradicts the choice of
as the first double zero. The only possible location of
-s is as in
Figure 6. The arrangement of solutions as in
Figure 7 is not valid also. □
5. More on Nonlinear Equations
Solutions of equations of the form
where continuous coefficient
and
possess the following properties.
Since we are looking for solutions of (
23) that have double zero consider the case
The case
is symmetric.
Due to Theorem 3 there are solutions with the initial values which have a double zero at some point and Then such a solution is positive for Solutions with and also have a double zero at some point (individual for any solution) and do not change the sign for For odd i these solutions are positive and for even i they are negative for Therefore the following assertion is true.
Lemma 3. Let Then any solution with which has a double zero at some point has the vertical asymptote.
Proof. Follows from Lemmas 4.2 and 4.3 in [
15]. □
Suppose
is a solution of the Equation (
23) with the initial conditions
and with a double zero at
For brevity, let us call such a solution
extremal solution. In contrast to the linear case, multiples of extremal solutions need not be an extremal one.
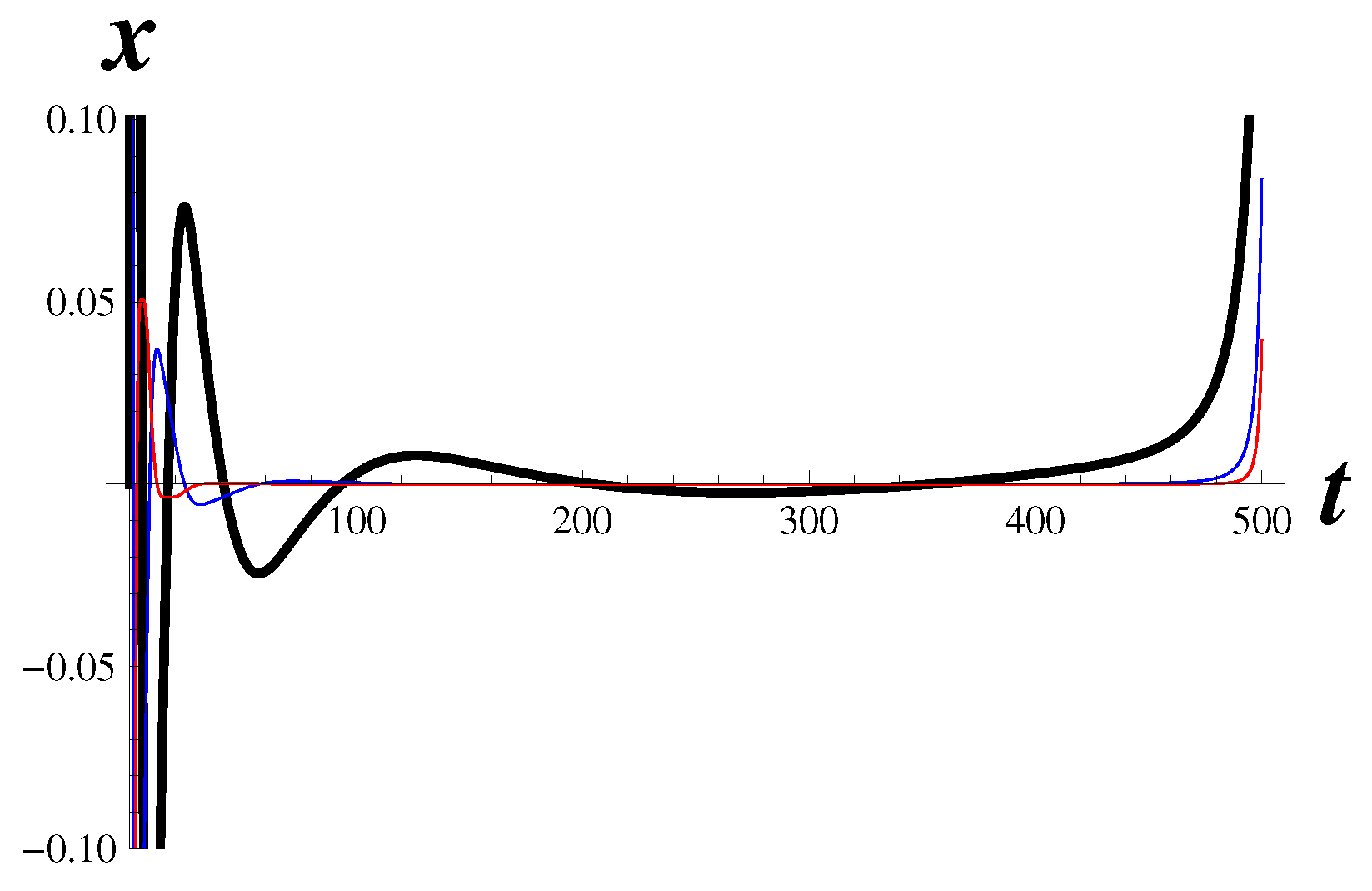
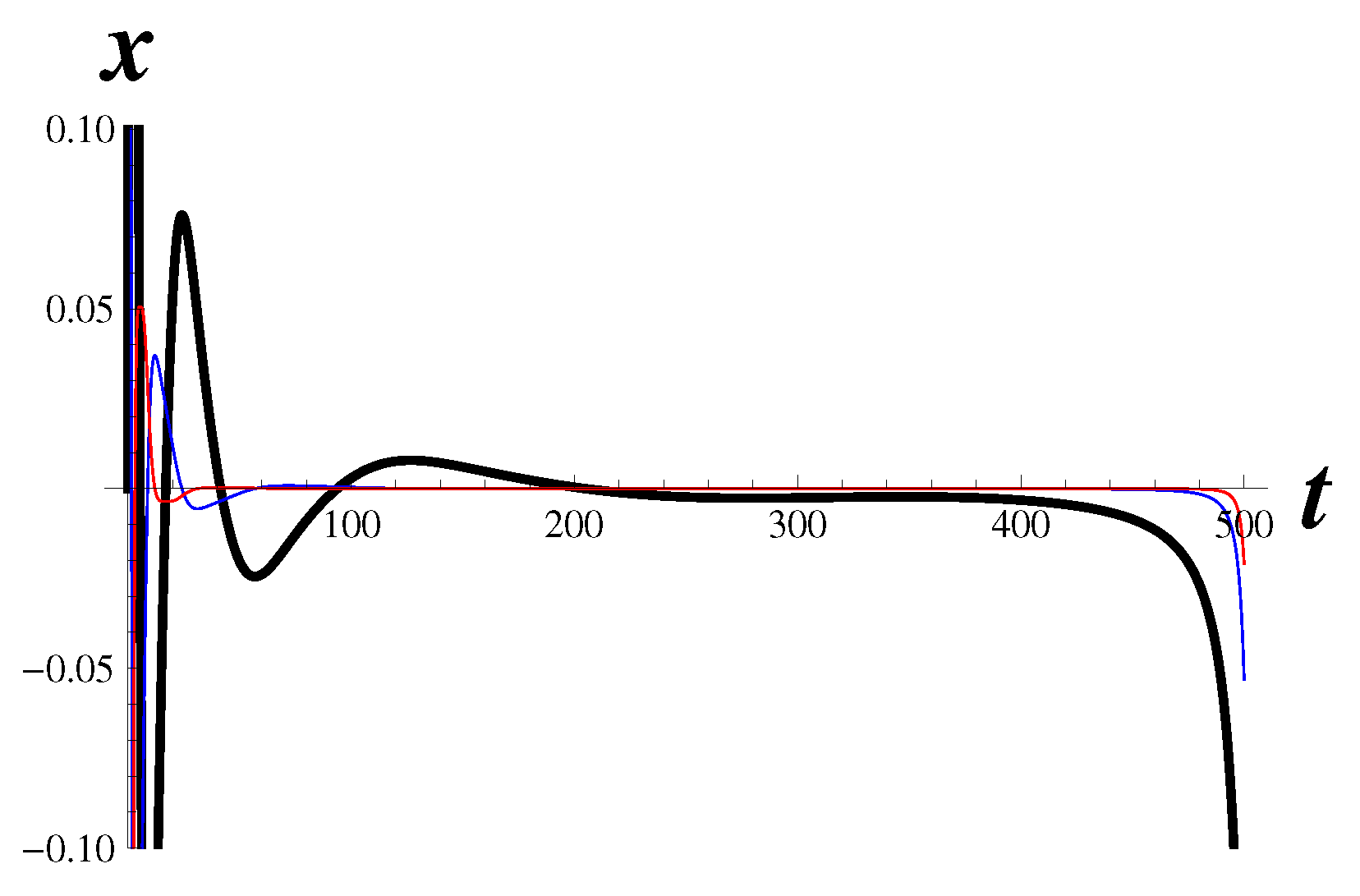
Let
Any extremal solution may oscillate, having several zeros in the interval
and a double zero at
Then it is either eventually positive, or negative, like in
Figure 8 and
Figure 9. Due to Lemma 3, any such solution must have the vertical asymptote. The next statement, which is a consequence of Theorem 4.4 in [
15], describes the asymptotics of extremal solutions.
Lemma 4. Any extremal solution has asymptotics whereand is the vertical asymptote for a solution. There is another description of the asymptotic behavior of extremal solutions. Let us, following [
15] (§4.3), introduce new functions
By standard differentiation of
with respect to
t and taking into account (
17) we can obtain a two-dimensional non-autonomous system of differential equations. Continue with introduction the independent variable
for any extremal solution
In view of Lemmas 3 and 4,
as
where
is an asymptote for
Functions
considered as functions of the variable
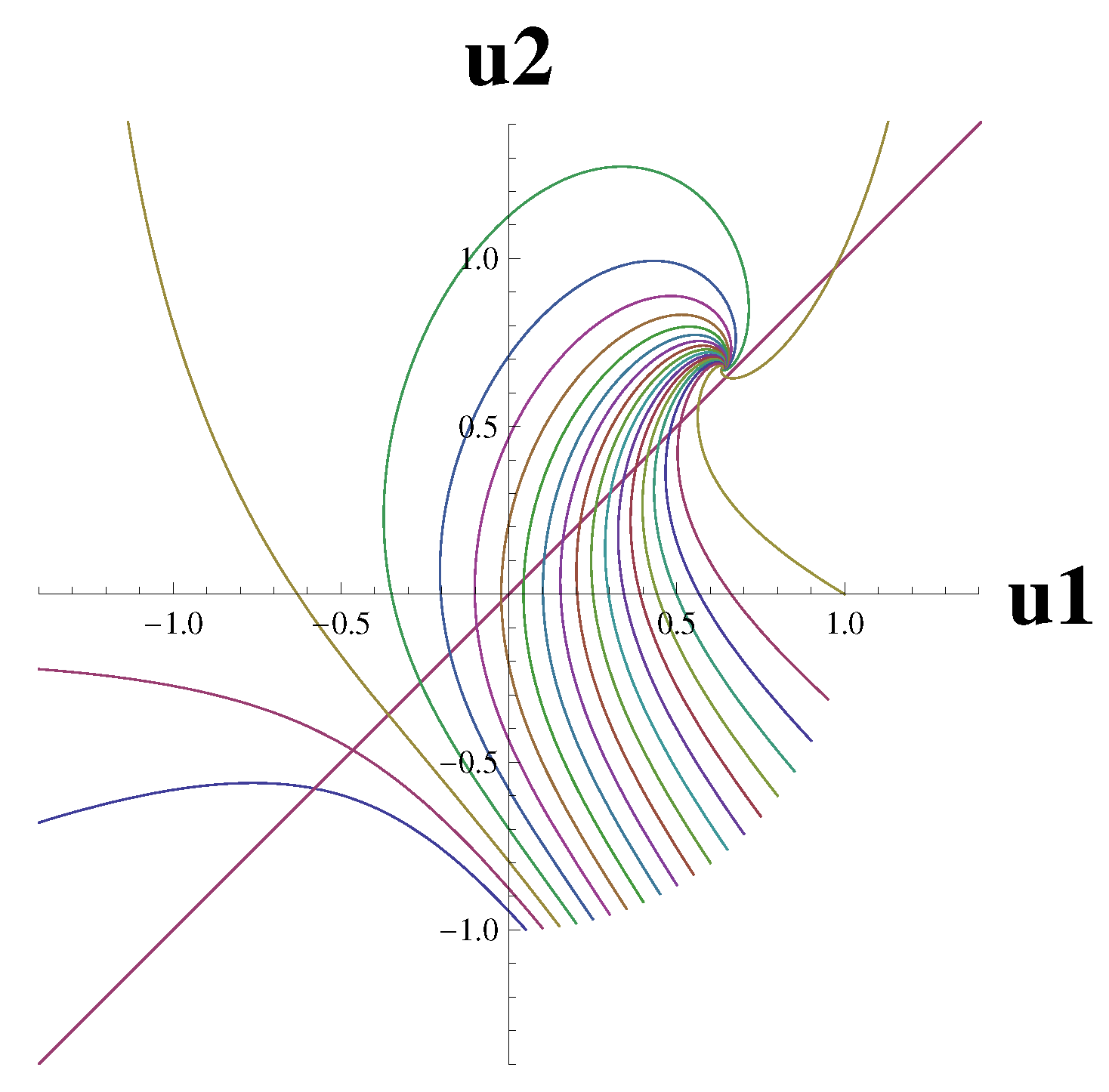
satisfy the autonomous system
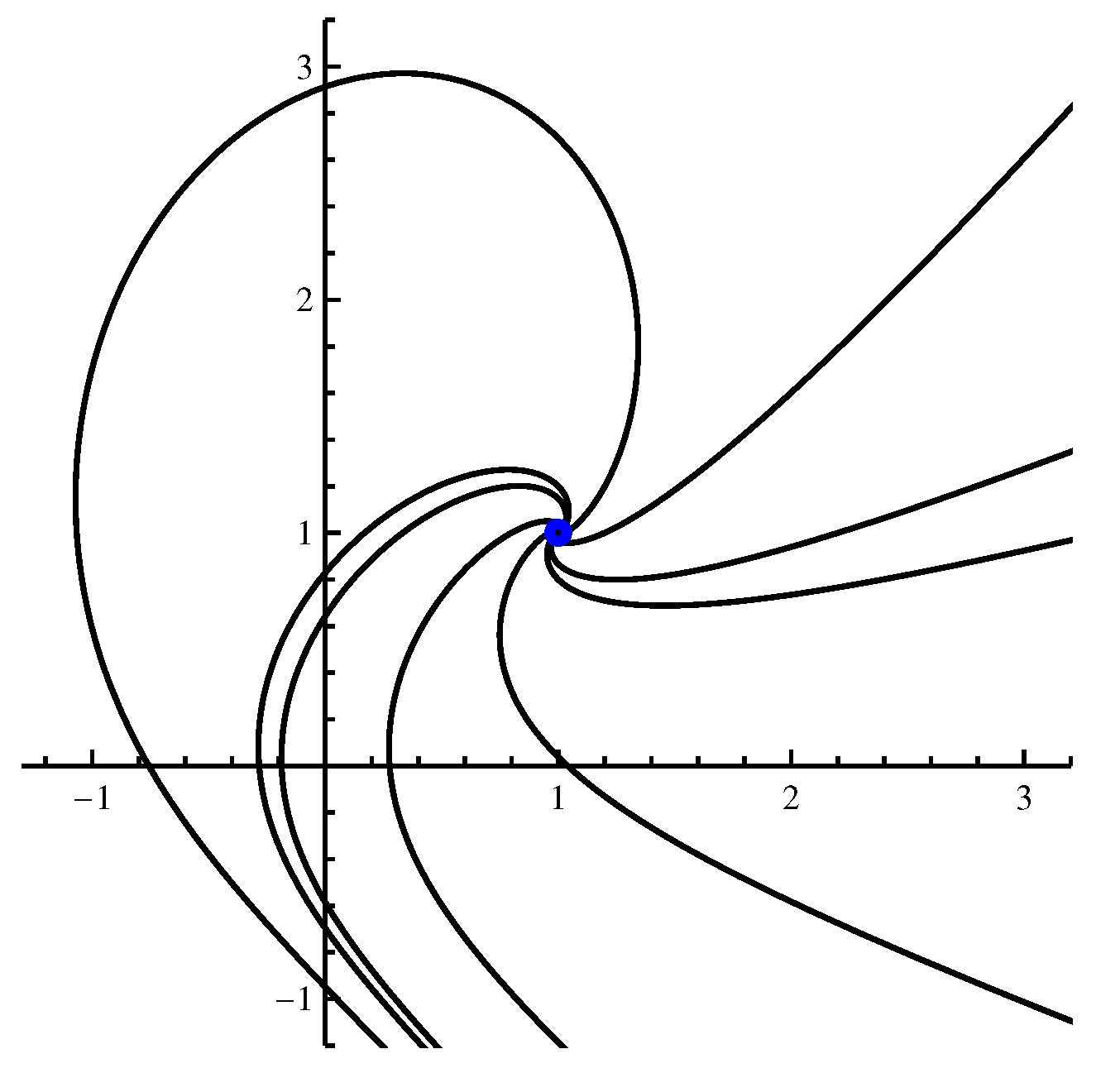
Any extremal solution
generates a phase trajectory
which tends to a single critical point of (
27). The phase portrait for (
27) is depicted in
Figure 10.
6. Conclusions
The structure of a set of extremal solutions, associated with the conjugate points accordingly to the linear theory by M. Hanan [
2], is revealed. There are two groups of extremal solutions. Solutions of the first group, after several oscillations, go to
Solutions of the second group go to
Their initial conditions become extremely close, so they are very difficult to discover numerically. Both groups are separated by a solution with an infinite number of zeros. This solution for
in the Equation (
1) is unique.
For nonlinear equations of the Emden-Fowler type, the structure of a set of solutions, satisfying the initial conditions and having a double zero to the right of is similar to that of linear equations. There are no conjugate points, however. To find numerically the initial conditions for a solution, which has a double zero at some prescribed point, can be a difficult task. Solutions of nonlinear equations also form two groups. Solutions of both groups end respectively at or at Both groups are separated by an oscillatory solution (-ns), which is hard to find. In the two below pictures the graphs of two solutions to the equation are depicted.
They belong to different groups, their behavior is essentially different, but the initial conditions for the second derivative differ only after 22 decimal places.
When looking for solutions of a certain structure (for example, solutions with a given number of zeros), one must be careful, since even for formally simple ODE, they (solutions) can be overlooked when conducting numerical experiments. This applies to ODEs already of the third order and higher. Data on the mutual arrangement of solutions can be used in the study of multiple solutions of boundary value problems [
16,
17].



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}