
Integrating Electric Vertical Takeoff and Landing Aircraft into Public Airspace: A Scenario Study



1
Transportation, Logistics & Finance, College of Business, North Dakota State University, P.O. Box 6050, Fargo, ND 58108-6050, USA
2
Upper Great Plains Transportation Institute, North Dakota State University, P.O. Box 6050, Fargo, ND 58108-6050, USA
*
Author to whom correspondence should be addressed.
Future Transp. 2023, 3(3), 1029-1045; https://doi.org/10.3390/futuretransp3030057
Submission received: 15 June 2023
/
Revised: 20 July 2023
/
Accepted: 7 August 2023
/
Published: 25 August 2023
Abstract
:The successful deployment of Advanced Air Mobility (AAM) requires the safe integration of electric vertical takeoff and landing (eVTOL) aircraft in non-segregated airspace. However, a lack of practical deployment demonstrations can slow the regulatory progress. This study presents a practical deployment framework for the integration of eVTOL aircraft into public airspace, in accordance with the Federal Aviation Administration (FAA) special airworthiness criteria. This study focused on a corporate use case to provide a comprehensive scenario for enhancing intra-company mobility. The scenario supports early implementation and demonstration goals by removing reliance on air traffic management systems or air traffic controller separation services. The practical deployment framework included facility selection, route planning, terrain mapping, collision avoidance, aircraft selection, infrastructure requirements, vertiport placement, electric chargers, ground handling, operational staff, and cost estimates. Planners can use the framework as a template to inform the implementation of real-world AAM services using eVTOL aircraft.
1. Introduction
Advanced Air Mobility (AAM) is a global initiative to address the opportunities and complexities of integrating emerging electric vertical takeoff and landing (eVTOL) aircraft into public airspace. eVTOL aircraft designs are maturing and several major commercial airlines have placed pre-orders, signaling their intent to deploy AAM services by 2025. A recent study forecasted a daily demand for 82,000 passengers in the U.S., representing an annual market valuation of USD 2.5 billion [1]. However, as of 2023, only a few companies have demonstrated mature operation in complex environments, including non-segregated airspace. Despite the difficulty of demonstrating eVTOL aircraft safety, there has been little research on practical deployment considerations to assure safety and reduce risk. The Ohio Department of Transportation was among the few agencies that recommended steps towards practical eVTOL aircraft deployment [2].
Overall, the literature lacks real-world scenarios for practical deployments. Therefore, the goal of this research is to present a practical deployment framework to serve as a template for initiating AAM services. The authors leveraged their combined expertise and experience in intelligent transportation systems, urban planning, and commercial aviation pilot to develop the framework.
AAM use cases include urban air taxi, regional air mobility, and helicopter replacement for a wide variety of applications that span emergency response to private transportation. Implementing AAM infrastructure that significantly interacts with the public amplifies deployment challenges such as regulatory, environmental, and community acceptance [3]. There is a gap in studying simpler use cases as a steppingstone towards more complex scenarios. Simpler environments that involve fewer stakeholders will increase the likelihood of successful demonstrations to encourage AAM policy acceleration and adoption. Therefore, the authors selected a large corporate facility for a scenario study that adheres to the Federal Aviation Administration (FAA) proposed rule for special airworthiness criteria [4]. The scenario aligns with the “crawl-walk-run” deployment blueprint proposed by the FAA [5].
This study offers new insights into the integration of autonomous eVTOL aircraft into public airspace by examining the unique characteristics of vertiports, operational requirements, infrastructure needs, and cost implications. The corporate use case minimizes complex interactions among public and private stakeholders while reducing reliance on traffic management systems or air traffic controller separation services. The framework includes practical routes, flight altitudes, and ground infrastructure needed to demonstrate eVTOL operations in non-segregated airspace. The flight routes are over congested areas. The flight operations consider safe takeoff and landing procedures, recovery from powerplant or systems failures, traffic avoidance, and stability characteristics across a variety of conditions. Planners and developers can use the framework as a template to implement real-world commercial AAM services that use eVTOL aircraft. The practical implications of the findings will inform policymaking and standards development.
The organization of the rest of this paper is as follows: Section 2 reviews the recent literature related to eVTOL integration within public airspaces and physical design concepts for vertiports. Section 3 develops each component of the practical deployment framework. Section 4 presents the results and implications, including a summary of cost estimates. Section 5 discusses the implications and limitations of the study. Section 6 concludes the study and discusses future work.
2. Literature Review
The literature has overwhelmingly covered the various motivations for AAM deployments. The top motivation is to escape the negative effects of ground traffic congestion by more efficiently utilizing the third dimension of travel [6]. Other motivations for AAM deployments include reducing the risk of environmental damage and economic issues caused by existing ground transportation systems [7]. However, there is still uncertainty about the economic viability and affordability of AAM services [8]. The literature established the need for multi-level governance but concludes that policy frameworks are lacking [9]. The next three subsections focus on proving facility development, traffic management issues, and knowledge of vertiport characteristics to identify gaps that can help to refine the proposed practical deployment framework.
2.1. Proving Facilities
In 2012, the U.S. congress tasked the FAA with integrating civilian drones into the national airspace system by 2015 [10]. Consequently, the FAA established drone test sites in Alaska, Nevada, New York, North Dakota, Texas, and Virginia. The test sites supported the development and demonstration of Uncrewed Aircraft System (UAS) Traffic Management (UTM) systems [11]. The Northern Plains UAS Test Site in North Dakota has been demonstrating beyond visual line-of-sight (BVLOS) capabilities to support the practical commercial deployment of drones [12]. The Ohio UAS Center partnered with the Air Force Research Laboratory to provide ground-based enhanced radar services for 200 square miles of airspace in the vicinity of the Springfield–Beckley Municipal Airport [13].
Aside from the United States, only a few other countries established AAM proving grounds for real-world evaluations. The United Kingdom established an experimentation corridor to evaluate BVLOS operations [14]. Spain established a test center with 30 × 45 km of segregated airspace for flight altitudes up to 5000 feet [15]. Singapore and France have been constructing vertiports and conducting AAM flight evaluations in urban environments [16]. Paris has been developing vertiports for evaluation during the 2024 Olympics [17]. In summary, there is a lack of real-world proving grounds to accelerate the pace of AAM regulation.
2.2. Traffic Management
Several studies examined requirements for the safe integration of drones into the national airspace. In a literature review of urban air mobility (UAM) developments, Garrow et al. (2021) identified a need for route optimization algorithms [18]. Another literature review by Schweiger and Preis (2022) affirmed that airspace management and traffic separation principles were critical considerations for UAM development [19]. The study suggested that AAM routes follow arterial highway systems into and out of major cities. However, the study did not consider local airspace traffic and interference.
Mathur et al. (2019) determined that flight plan deconfliction and detect-and-avoid systems are critically important for the advancement of AAM designs [20]. The study emphasized that secure and resilient datalinks are necessary to remotely control enroute aircraft. Al-Rubaye et al. (2023) found that a lack of adequate wireless coverage in congested cities and disconnected rural communities poses challenges for large-scale AAM deployments [21]. Remote pilots may also need to relay and receive voice commands to maintain compatibility with current air traffic control systems. NASA assessed a UAS system with automated flights in controlled airspace [22]. The system used onboard cameras with telemetry data and radar to enable traffic avoidance and remotely monitor flight progress. Low AAM flight altitudes increased the importance of maintaining reliable communications in the VHF radio band. Tang et al. (2021) proposed an automated flight planning system to provide low altitude traffic management solutions for dense urban airspace [23]. Their proposed solutions to avoid obstacles and obstructions in low-altitude airspace included 3D mapping with LiDAR data and the design of pre-departure conflict-free 4D trajectories.
2.3. Vertiport Characteristics
Planners must consider the unique requirements of vertiports to accommodate vertical takeoff and landing while managing the distinct noise and wind patterns produced by eVTOL aircraft. Operational aspects such as traffic management, safety protocols, and maintenance procedures will require a special blend of personnel and automated systems for efficient management. The location of vertiports must balance the need for convenient access, airspace sharing, emergency procedures, and potential noise and visual impact on the community.
NASA conducted a survey in Ohio and California to determine where respondents wanted vertiports to be located and how they preferred to use eVTOL aircraft [24]. In general, respondents preferred vertiports to be located close to public transit stations and parking facilities rather than near schools and parks. Willey and Salmon (2021) developed five heuristic algorithms to create structured networks of vertiport locations that would ease integration with public transit operations [25]. Bruesberg et al. (2021) proposed a vertiport design concept that integrated a landing platform into an existing parking structure by considering legal and minimum space requirements [26].
Aside from location assessments, a few studies considered physical amenities for vertiports such as charging facilities [27]. In general, studies recommended that eVTOL aircraft manufacturers standardize charging adapters or connectors to be compatible with vehicle charging stations. The challenges identified were the risk of shocks from high voltages and currents, freezing surface conditions impeding ground movements and landing, and lack of maintenance opportunities in high-demand urban areas [20].
Li (2023) found that although heliports and elevated parking structures can be repurposed to accommodate AAM services, those facilities are not necessarily close to populations that could benefit most [28]. A case study of São Paulo, Brazil, found that repurposing the existing infrastructure of aerodrome and heliports hold significant potential for improving urban mobility [29]. Airports can tap into the AAM market to improve their own connectivity, ease local congestion, and open new routes [30]. However, with growing demand, the existing facilities can become congested [31]. Furthermore, passenger throughput is a function of the aircraft utilized [32].
Overall, studies that focused on considerations for AAM deployment evaluated concepts of operations from a theoretical perspective and seldom drew on the expertise of pilots, commercial operators, and aviation regulators to assess empirical considerations. That is, there is a gap in the literature from studies that exposed practical considerations for successfully deploying AAM using eVTOL aircraft, and the practices needed to achieve safe integration into the national airspace.
3. Methodology
The subsections that follow describe the various components of the proposed practical deployment framework and how they apply to the selected scenario of corporate air mobility. The subsections that follow discuss each component of the framework: use case rationale, facility selection, route planning, terrain mapping, collision avoidance, aircraft selection, infrastructure requirements, vertiport placement, electric chargers, ground handling, operational staff, and cost estimates. Figure 1 summarizes the methodological steps of the deployment framework, including a summary of the results and conclusions.
3.1. Use Case Rationale
A scenario study to deploy vertiports could consider a variety of use cases such as urban air taxi, airport shuttle services, helicopter replacement, and corporate air mobility. The authors selected a use case that would minimize complexity and interactions between disparate stakeholders. The use case was corporate air mobility to transport employees between company site locations. A corporate use case has the advantage that coordination involves a single entity that has authority over its facilities, personnel, budget, and future goals. The authors posit that demonstrating initial success with a simple but practical and useful scenario would help diminish uncertainties in developing regulations and policy to accommodate more complex scenarios.
This study focused the corporate use case on General Motors (GM) facilities in Detroit, Michigan, for several reasons. First, there is a lack of studies about the potential for AAM deployments in the upper Midwest region of the United States—most studies focused on urban air mobility in large cities of California, New York, and Texas. Second, a previous AAM study established that Detroit is a suitable location to begin eVTOL aircraft operations because planners can more easily reduce air traffic control (ATC) workload by procedurally segregating terminal airspace from large aircraft operations [33]. Third, GM has 26 facilities in Detroit alone that can serve as a real-world testbed for the practical integration of AAM service in the national airspace [34]. Fourth, GM has an aviation transport department that demonstrated a VTOL aircraft that could operate on-demand and use rooftop vertiports [35]. Fifth, one of the authors of this study is a commercial airline pilot residing in Michigan. He has access to local subject matter experts and facilities to make observations, gather real-world data, and obtain feedback about the practicality of the proposed components of the framework. Considering the company headquarters in downtown Detroit to be the central focus for AAM deployment resulted in a maximum service distance radius of approximately 75 nautical miles.
3.2. Facility Selection
This study used several criteria to select corporate facility locations to install vertiports. First, facilities should be within the range capability of available eVTOL aircraft currently under evaluation by the FAA. Second, facilities must be located outside of or below control tower airspace (Class B to D) as defined in the visual flight rule (VFR) sectional aeronautical charts for the area. Third, the locations must accommodate lateral route pathways that can avoid physical obstacles and restricted airspace. Fourth, biasing the facility selection towards the most populous campuses would potentially result in more frequent flights for richer data gathering. The authors applied heuristics based on piloting experience and in-depth knowledge of VFR information about the area to make decisions based on the above criteria. Table 1 lists six GM facilities that met the above criteria. The authors used Google Earth® as the geographic information system (GIS) tool to map the facility locations and vertiport areas for further analysis.
3.3. Route Planning
The range of appropriate vertical altitudes are above obstacles and below some existing crewed air traffic. Crewed air traffic operates under visual flight rules (VFRs) and instrument flight rules (IFRs). The flight paths of aircraft flying within IFRs will always operate under air traffic control, and they will fly at or above the minimum en-route altitude (MEA) published on an enroute segment, or at the air traffic controller (ATC) assigned altitude. ATCs may assign an altitude relative to the minimum vectoring altitude (MVA) when pilots are in a designated area but not following a specific route. Aircraft flying under VFR can receive traffic advisory from an ATC, but they must independently monitor their flight environment by visually scanning outside the vehicle window for intruding aircraft. Therefore, vertical altitudes above physical obstacles and below MEA and MVA altitudes are safe for AAM flights. This strategy segregates AAM traffic from IFR traffic while exposing and integrating them with VFR traffic in the same vertical airspace blocks. Mature development of AAM will inevitably lead to the integration of new takeoff and landing sequencing and traffic management programs that use existing radar and voice communication methods.
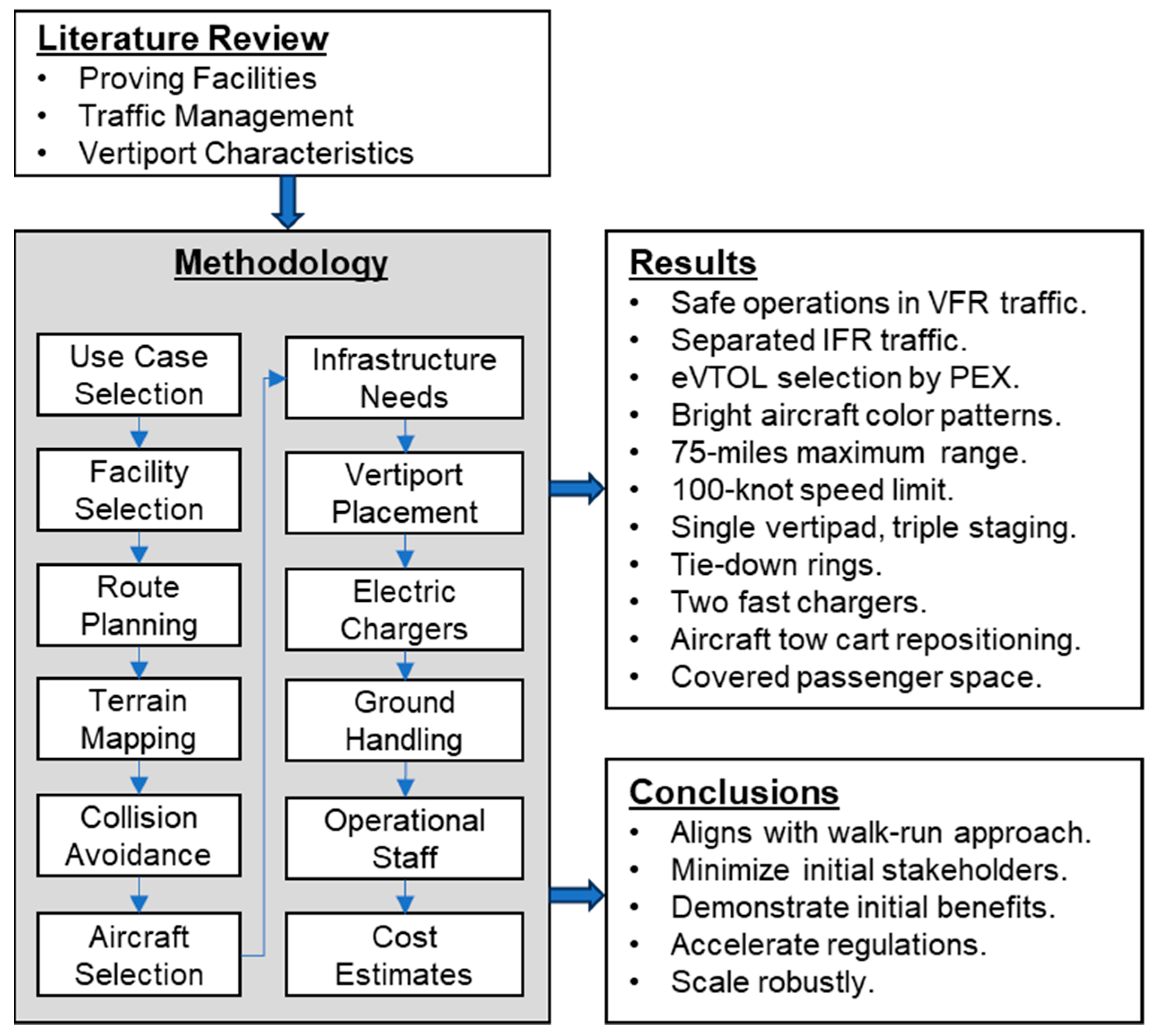
The last column of Table 1 indicates the local airspace constraint for each of the proposed vertiport locations of the GM facilities. The authors used flight planning software from ForeFlight (version 15.5) to plan the routes. Figure 2 maps the facility locations (blue diamonds next to the site number from Table 1) and the locations of airports with tower-controlled airspace. The solid blue, dashed blue, and solid magenta rings represent Class B, Class D, and Class C controlled airspace, respectively. The labels for the rings indicate the altitude shelves in the vertical dimension. The center of the rings are airport locations, identified by their standard four-letter code.
As an example, Figure 2 shows the suggested lateral routing (thick blue lines) from facility 4 to avoid controlled airspace. The authors leveraged their domain expertise, knowledge of local airspace, and FAA airspace charts to identify suitable flight paths. The preferred lateral routing is a direct geodesic path between vertiports of the six proposed facilities with deviations to avoid Classes B, C, and D towered airports. The routing considerations are identical for departures from any facility.
3.4. Terrain Mapping
Planning AAM operations along low-altitude routes minimizes interference risk with most commercial traffic that flies under IFRs at higher altitudes. That is, pilots fly at higher altitudes to achieve more efficient aircraft performance. Flying at higher altitudes conserves fuel, avoids obstacles and weather, allows pilots more reaction time to respond to powerplant failures, and provides a better vantage point for spotting distant landmarks or checkpoints for visual navigation [36]. Once pilots reach a safe VFR cruising altitude for the entire flight route, they are unlikely to vacate that altitude until necessary for descent and landing [37]. The length of flight, pressurization requirements, and weather conditions determine the desired altitudes.
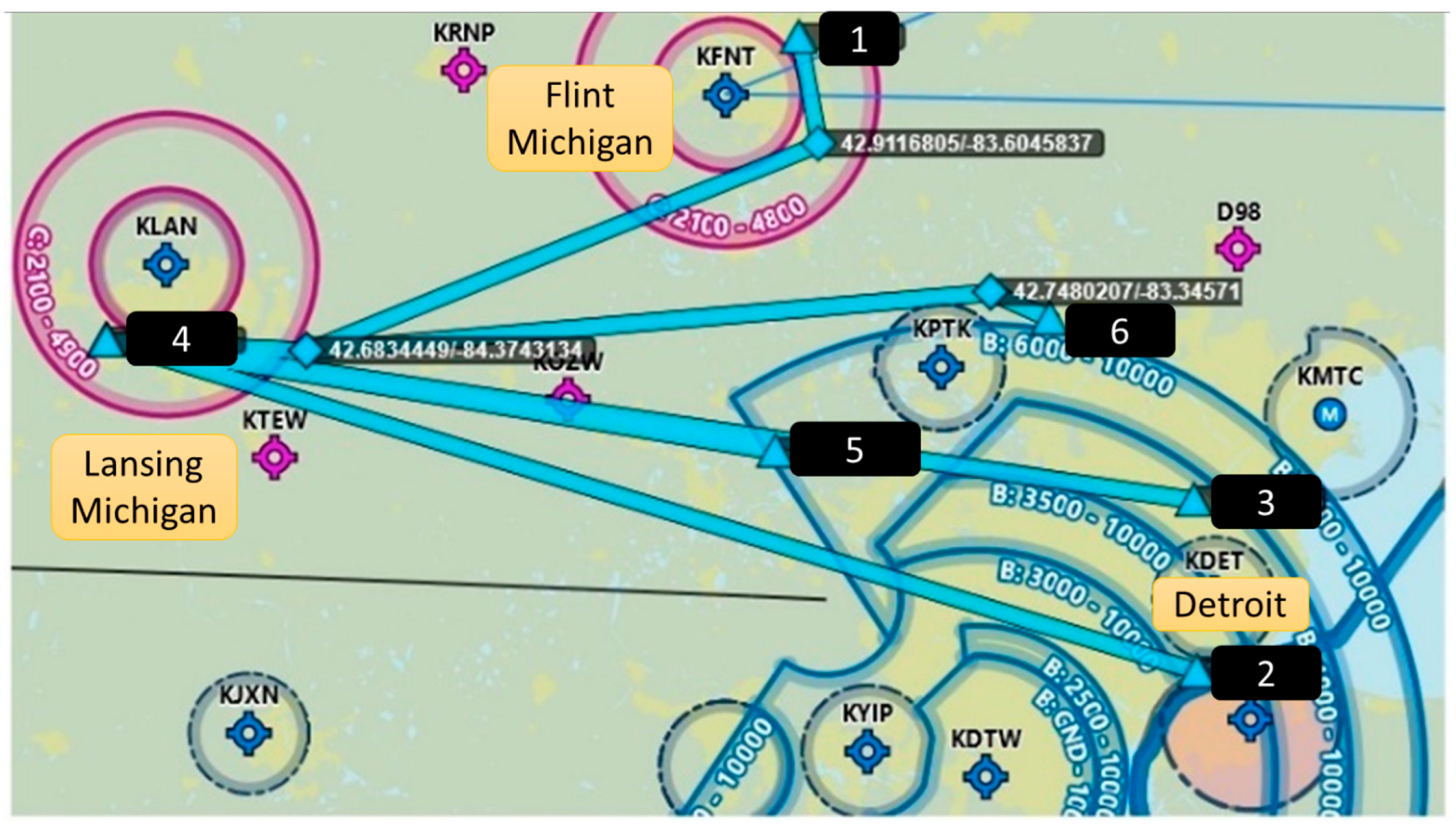
Typically, pilots will only fly at minimum altitudes for training, sightseeing, specific commercial missions, avoiding adverse weather or airspace, and landing at an airport. Planners choose minimum altitudes by finding the highest obstacle within 2000 feet laterally of the aircraft and then adding 1000 feet and 500 feet for congested and non-congested areas, respectively [38]. Therefore, planning autonomous AAM flights closer to charted obstacles decreases the chances of interference from crewed aircraft. Figure 3 shows a screenshot from the ForeFlight route planning software that includes information about vertical clearances and an underlying map relative to the airspace constraints.
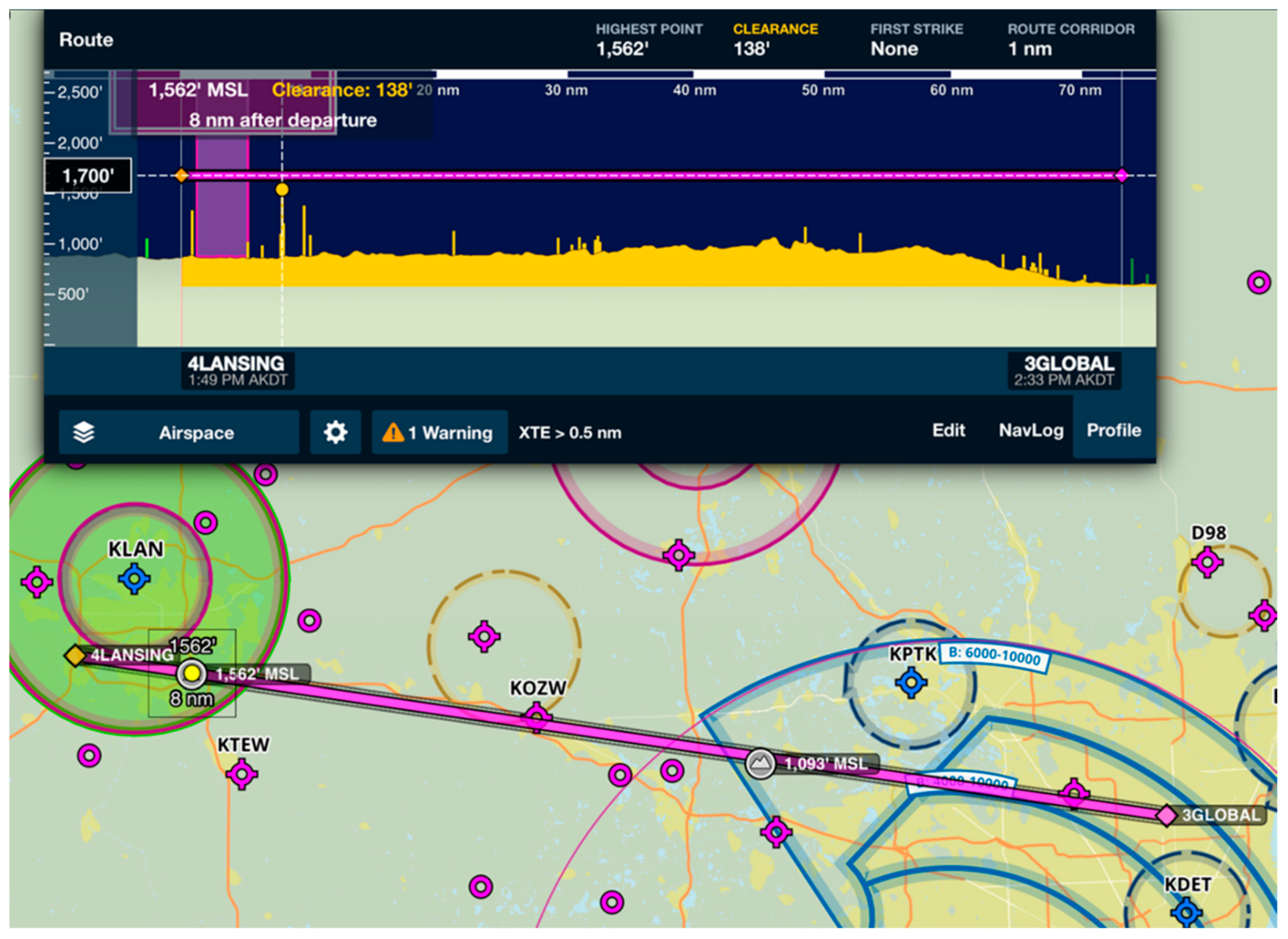
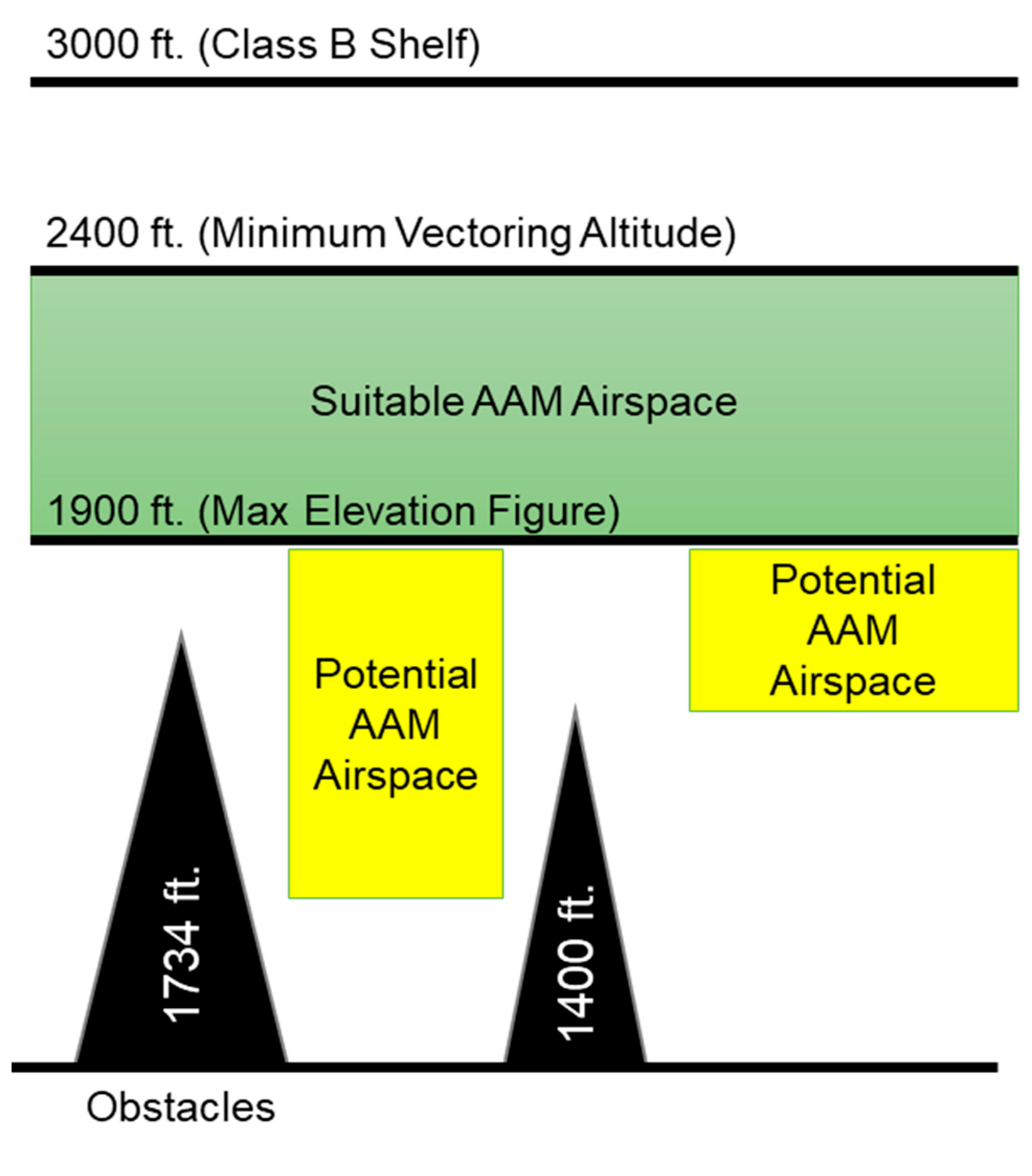
With more complete databases of terrain and obstacle layers, planners could designate additional airspace to autonomous eVTOL aircraft. For example, Figure 4 shows additional airspace that could be available below the planned AAM airspace. Autonomous flights could use their precise tracking abilities to navigate under much closer margins inside airspace with accurately developed aerial models of urban areas, detailed structures, and terrain limits [39].
3.5. Collision Avoidance
Many modern avionic installations use Automatic Dependent Surveillance–Broadcast (ADS-B) displays to help pilots identify nearby traffic. However, not all general aviation VFR traffic has the capability to view the positions of other aircraft via ADS-B. Following the 2020 FAA mandate to install ADS-B-out capabilities, many aircraft also added ADS-B-in capabilities. Increased use of electronic flight bag (EFB) resources and moving map cockpit displays of weather and traffic has increased situational awareness for pilots. Personal tablets using Bluetooth and Wi-Fi connections with installed avionics can display ADSB-in data. Pilot training involves interpreting ADS-B traffic and weather information as advisory only, so pilots must crosscheck that information with other sources and visual scanning. Studies like the one by Howell, King, and Chen (2022) show that the probability of mid-air collisions decreases as more pilots utilize ADS-B information [40].
Recent studies show that pilots can visually spot small UAS aircraft [41]. The experiments showed that pilots could spot larger fixed-wing UAS models from a greater distance than that for spotting smaller quadcopter UAS models. A small quadcopter measuring 1.8 feet long and 1.8 feet wide resulted in a mean detection distance of 0.10 statute miles. Pilots detected a larger drone of length 4.6 feet and wingspan 6.7 feet at a mean distance of 0.493 statute miles on 87% of the test scenarios. For reference, the proposed type of eVTOL aircraft has a wingspan of approximately 50 feet. The reaction time for an average pilot to spot an intruder and maneuver clear of the conflict was 12.5 s [41]. Using calculations with a common airspeed of 100 knots provided 15.4 s of reaction time between a moving aircraft and a stationary 6.75 feet UAS model.
To reduce the risk of inflight collisions between autonomous aircraft and uncontrolled visual piloted aircraft, bright exterior colors, fluorescent paint, and contrasting designs can be effective. Determining the “best” color for visual detection depends on the viewer’s angle, the time of day, the lighting conditions, and the background color [42]. Coast guard rescue aircraft use orange paint for contrast against ice. A pilot flying at 5000 feet looking down for another aircraft at 2000 feet needs a color that will contrast against the darker ground landscape. If the landscape has green or brown topography, a plain white color may be easiest to distinguish. Manufacturers use a blended color scheme because changing visual conditions prevent a single solid color from being appropriate for all scenarios. For example, manufacturers use two opposing patterns and color schemes for the upper and lower surfaces of the aircraft [43].
3.6. Aircraft Selection
An eVTOL aircraft suitable for this scenario study would be a 4-seat, battery powered aircraft capable of remote piloting and autonomous operation. Voice radio transmissions should also be available for a project controller on the ground to relay through the aircraft, or on behalf of the aircraft. The recently developed propulsion efficiency index (PEX) guided the selection of a suitable aircraft category [44]. Aircraft meeting the above criteria had a range of at least 75 nautical miles, including power reserves for indirect routing, inefficient altitudes, loitering time prior to landing, and any adverse weather or headwinds that would decrease the range capability.
3.7. Infrastructure Needs
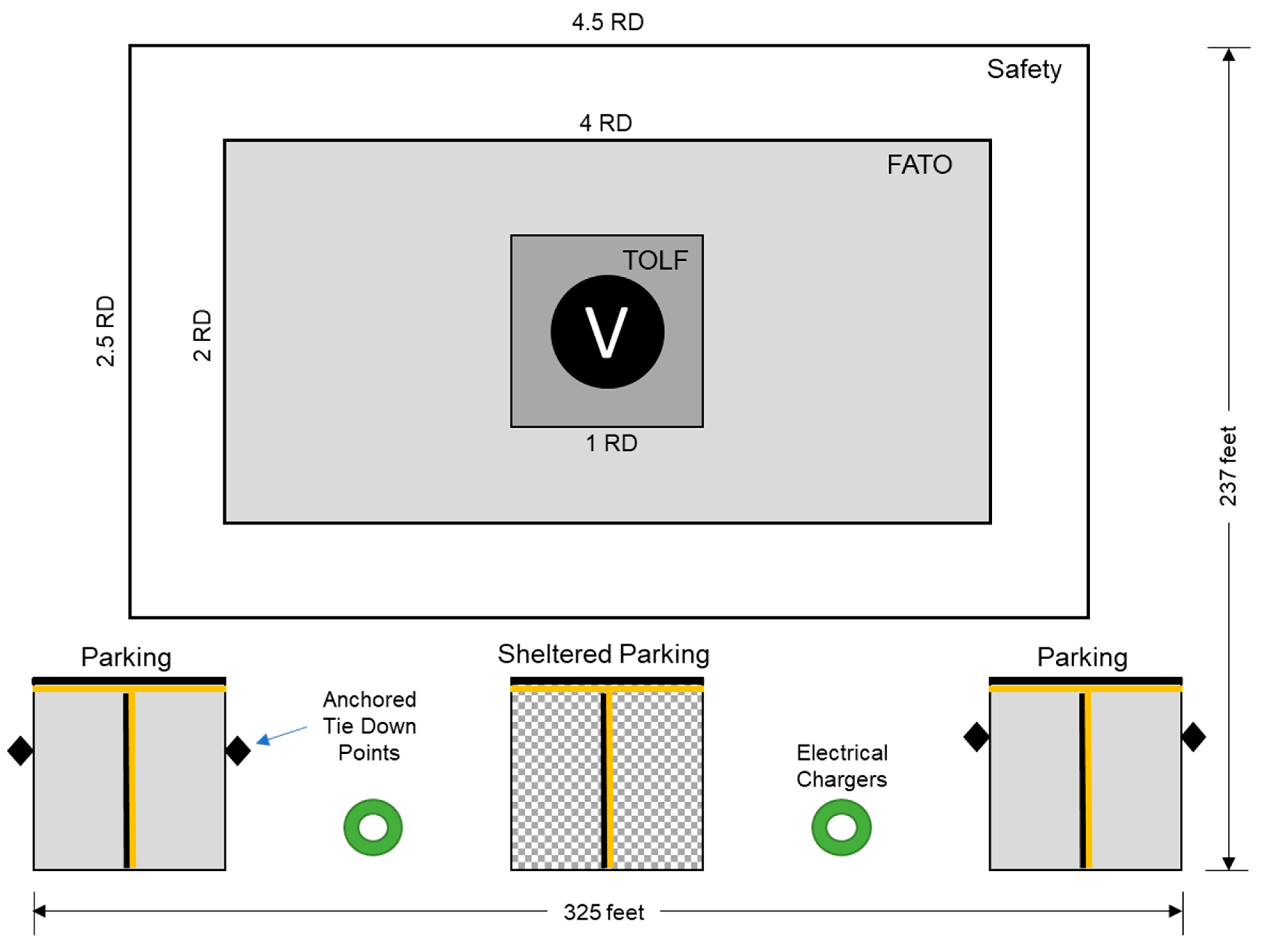
General aviation practices require a designated area for eVTOL aircraft to take off and land that is free from hazards and loose debris. Suggested placements for the designated area, known as a vertipad, included rooftops, floating barges, and ground surface lots [45]. The design should include a track system to move aircraft off the vertipad to a nearby parking or staging area. This framework suggests a design with a single vertipad and three staging areas. Figure 5 illustrates that such a design will occupy an area measuring 237 feet by 325 feet and cost $950,000 to build [46].
A basic vertiport has a load-bearing area for touch-down and lift-off (TOLF), a final approach and takeoff area (FATA), a safety area, a clear approach or departure path, and a clear area to maneuver on the ground. Figure 5 shows the dimensions of each area relative to the cumulative rotor diameter (RD), which is often the maximum dimension of an eVTOL aircraft.
Placing the vertiport on an existing paved and level parking lot without track systems would reduce the installation cost. New surface markings for the aircraft landing area, lighting systems, and surface identification technology would add to the cost [47]. A recent survey found that all the current landing zone detection systems rely on visual camera or LiDAR technologies. Hence, it would be important for the proposed vertiports to incorporate signage or markings that the aircraft manufacturer recommended [48]. It would also be preferrable to add metal roofing over at least one of the staging areas to shield passengers from rain and snow during boarding. A passenger waiting area or building should be adjacent to the shielded staging area.
3.8. Vertiport Placement
The dimensions proposed for practical vertiports informed the search for suitable areas at each of the six GM facilities selected. Figure 6 shows satellite imagery of vacant land or large parking lots at each site.
The GIS distance measurement tool provided an estimate of the vertiport area dimensions, shown as yellow squares in the images. In general, corner placement of vertipads would provide the most flexibility in allocating approach and departure flight paths [49]. Some of the existing truck parking locations observed in the images would meet the corner placement criteria if management could repurpose those spaces.
The downtown Renaissance Center (site 2) had large adjacent parking lots and a garage structure. To minimize parking spot losses, the suggested vertiport was smaller than the suggested model with three staging areas. The dimension of a single pad vertiport would be 128 feet × 227 feet. Hence, based on the dimensions of standard U.S. 90-degree parking lots, the estimated parking spot loss was 57 in the smaller downtown vertiport, and 301 at the other five locations [50].
3.9. Electric Chargers
Electric charging stations will be necessary to enable direct flights between any pair of facilities. Each vertiport location should have two or more electric chargers to provide capacity for supporting the maximum desired flights within a defined time window. The recommended design is to position two chargers between the three vertipads in a way that allows each charger to reach two vertipads. Having at least one backup device would also increase redundancy and prevent stranding an aircraft in the event of a single charger failure. A downtown location with limited space for charging could still be part of the flying network if the aircraft arrived with enough charge remaining to reach another station [26].
Planners hope for industry-wide standardization of charger equipment across AAM designs, but currently there are no specific guidelines [51]. Table 2 summarizes the general specifications for existing automotive charger designs that may be compatible with some emerging eVTOL aircraft designs [52]. Level 3 chargers are desirable for quick stops or industrial applications [53].
3.10. Ground Handling
Vertiport designs with more than one vertipad will increase the capacity for flights during peak travel times. However, ground personnel will need to reposition aircraft from an active landing surface to utilize the enhanced capacity. Moving a parked rotorcraft on the ground reduces the risk of injury to waiting passengers. Repositioning also reduces the risk of rotor collision between two eVTOL aircraft as they hover around each other. Rotorcraft in near-ground hovers create strong outwash airflow that may cause light aircraft to rock and shift. Depending on the aircraft weight distribution and surface area exposed to the outwash, eVTOL aircraft could be more susceptible to tipping over or shifting [54]. An eVTOL aircraft could use existing electric tugs, dollies, or tow carts that commonly lift helicopters off the ground for repositioning [49]. Such devices need one person to operate [55].
Parking tie-down spots should be adequate for securing the eVTOL aircraft when not in use. Ties avoids the cost of building a hangar at each location [56]. Surface winds in the Detroit area can reach 30 to 40 knots with gusts, which can displace, or damage aircraft left unsecured in the open. Rooftop flow conditions and turbulent windshear patterns near tall buildings add complexity to eVTOL aircraft performance requirements, especially for takeoff and landing [57].
3.11. Operational Staff
The recommended vertiport design will need one person for ground handling. However, there should be two line-service personnel if daily operations exceed ten hours. Line service personnel would be responsible for moving the eVTOL aircraft between active and staging pads and to secure electric charger plugs to the aircraft. Personnel could also supervise boarding and manage data download from any onboard monitoring equipment.
At the central control facility, at least one remote pilot should be on duty anytime the flight network is operational, and a backup pilot should be available to relieve personnel every two hours [58]. A single multi-vehicle operator would suffice for simple eVTOL ground operations. The second person would rotate and tradeoff between rest periods throughout the daily duty shift. Night flights would require additional operators to schedule effective coverage throughout each week.
3.12. Cost Estimates
Table 3 summarizes the estimated cost to deploy the infrastructure and aircraft for the six GM sites. The last column references the source of the cost estimate for each item. The estimate used a median value where the literature published a range of costs for an item. For example, the installed cost estimate for a Level 3 charger was USD 45,000, which is the median value for the cost range reported by Rajendran et al. (2021). The allocation is one charger for the smallest vertiport at site 2, and two for the other sites. The cost per electric tow cart of USD 12,600 was based on the list price of a common device that the authors are aware of that move helicopters. The cost estimate of USD 1.3 million per eVTOL aircraft was based on anticipated earnings per aircraft and payback period information reported by Joby Aviation, Inc. in its annual report to the Securities and Exchange Commission (Form 10-K) [59]. The fleet size recommendation of five aircraft considers the limited parking space available at each site and the possibility that one aircraft could be under maintenance or modification at any time. Hence, as of 2023, the total upfront cost estimated to install infrastructure and deploy aircraft was USD 12.7 million for the six GM sites.
There are some limitations to these cost estimates. They did not include the cost for a control facility because that information is not available in the literature. The cost estimates also do not include maintenance and insurance costs because those are also currently unavailable. Therefore, it is conceivable that the total upfront cost to deploy AAM services at a large corporate facility like GM could exceed USD 13 to 15 million at the time of anticipated deployment in 2024. Finally, the authors do not provide a context for these costs relative to the benefits and costs of alternative corporate transportation options, which would be a scope for future research focused on benefit–cost and return-on-investment analyses.
4. Results
Although AAM research is worldwide, only Singapore and the U.S. states of North Dakota and Ohio have allocated dedicated airspace to evaluate AAM integration into national airspace. The vertiport network proposed for the GM scenario would allow eVTOL aircraft to safely operate within the same airspace as VFR traffic, while staying separated from IFR traffic and airports with control towers. The authors used a GIS tool to help select GM sites that are outside of controlled airspace. Separately, the authors used the PEX tool to narrow the recommended eVTOL design to a four-seat aircraft that can fly autonomously for at least 75 nautical miles. A literature review of vertiport designs resulted in the selection of a single vertipad with a triple staging pad layout that balances price and space requirements. The vertiports featured tie-down rings to secure the eVTOL aircraft overnight and during high winds. Electric fast chargers positioned between staging areas should reach two parked aircraft. An electric tow cart and one person can reposition aircraft to increase the capacity of the active vertipad. The tow can also move loaded aircraft to enable riders to board and disembark under a covered space instead of the active vertipad.
Routing followed straight lines between vertiport sites to minimize flight range but deviated around controlled airspace as needed. The framework prioritized use of altitudes that are least likely to create a traffic conflict over more efficient performance at cruise altitudes. Hence, the planned flight altitudes avoided IFR airspace and utilized the remaining lower airspace shared with VFR traffic. ADS-B technology provided a way for other flights to self-separate from the autonomous eVTOL flights. A command-and-control remote pilot station should be located near the vertiport at the system center, which would be near the Milford Proving Ground.
Based on the authors’ piloting experiences, planners should consider a 100-knot speed limit for early autonomous AAM flights to keep closure rates and reaction times within existing general aviation performance capabilities. Based on empirics, the authors expect that the average reaction times were adequate for pilots to visually spot and maneuver away from comparable size aircraft, without help from ATC radar. Bright color patterns on the top and bottom of aircraft wings could improve visibility under certain lighting conditions.
The cost estimates to deploy infrastructure and aircraft at the six selected locations of the GM facility are based on 2022 figures. It is likely that costs will decline with economies of scale as AAM deployments mature. However, the initial budgets to build practical facilities that can meet the proposed FAA airworthiness criteria will exceed tens of millions of U.S. dollars. Those costs do not include personnel salary, insurance, or maintenance. Companies will need to compute their own return-on-investment based on the average number of personnel that need to travel daily between facilities, the cost alternatives, and the potential for enhanced productivity based on travel time savings.
5. Discussion
Despite using anticollision technologies, autonomous aircraft must consistently demonstrate their ability to maintain position, speed, and altitude, even in GPS-denied and inclement weather conditions. These capabilities become especially significant given the potential breadth of AAM deployments. The initial choice of a four-seat autonomous aircraft with a robust range of 75 nautical miles balances operational efficiency and safety. However, service providers must reevaluate these constraints to meet both safety standards and operational requirements as the technology and regulations mature.
Accurate 3-D terrain mapping databases will aid visual flight rules in low altitude traffic, but such databases must become widely adopted, standardized, and continuously updated. Furthermore, there is a lack of policies for right-of-way rules and evasive responsibilities. For example, policies should dictate if piloted aircraft must give way to autonomous flights, or vice versa. Evasive actions should specify heading changes for lateral direction, changes in speed to meet arrival and departure sequencing times, and the appropriateness of vertical climbs and descents. Regulations should also specify that autonomous aircraft must yield to low-altitude aircraft like balloons and gliders that are inherently less capable of maneuvering. Autonomous aircraft will also need to map their avoidance criteria into visual sensor information or relay positional data through ADS-B. However, doing so will require the addition of visual information to the aircraft exterior and into the traffic display system to help pilots distinguish between crewed and uncrewed aircraft. That is, regulations must be clear and well-defined to not only dictate right-of-way rules and evasive responsibilities, but they must consider the unique nature of autonomous flight operations.
This work’s key contribution is a practical deployment framework that could serve as a template for implementing real-world commercial AAM services with eVTOL aircraft. The focus on a corporate use case provides a unique perspective with a practical example that can fast forward more widespread policymaking. The suggested vertiport design, placement, and cost estimates provide inputs to plan initial infrastructure development. The scenario presented for integrating eVTOL into public airspace, in line with the FAA’s special airworthiness criteria, could provide valuable insights for policymakers and industry stakeholders. Addressing the challenges identified, such as operating in GPS-denied and inclement weather conditions, will require targeted innovations to advance those capabilities for more robust autonomous flights. The implication is that the industry needs to further advance innovations in sensor systems, AI-based flight control algorithms, and robust communications infrastructure.
The above contributions notwithstanding, this work has some limitations. The study focuses on a particular use case involving a single corporation. While the corporate scenario provides a practical perspective that lowers barriers to implement, it may not generalize to all use cases. Regulatory frameworks can vary significantly across different countries and regions. Furthermore, the study assumes that eVTOL aircraft will always reliably operate in autonomous mode, but failure in that assumption could result in service interruptions. In addition, for scenarios beyond the proposed initial evaluations, public acceptance and concerns about noise, safety, and privacy could hamper further AAM adoption. eVTOL service in urban air mobility applications will place higher demands on air traffic control systems and disrupt local ecosystems. Low flight altitudes can be more susceptible to turbulence, which may cause passenger discomfort. Meanwhile, the cost estimates provide a starting point for financial planning, the industry needs more research to fully capture the initial and ongoing financial implications. For instance, the study does not consider a potential return on investment and excludes cost estimates for insurance and maintenance due to lack of information. Nevertheless, the above limitations could be areas to explore in future work.
6. Conclusions
The full adoption of AAM could have significant impacts on various aspects of society. As a new mode of transportation, eVTOL aircraft will provide faster, more accessible, and more efficient travel than existing ground-based public transportation methods. Therefore, affordable AAM services can significantly reduce the time spent commuting, especially in congested urban areas, and enable more rapid emergency response and ambulance services that can potentially save lives. Electrified aircraft with a distributed propulsion system will be safer, quieter, and less polluting. Furthermore, maturing eVTOL services can stimulate economic growth and spur innovation in key technologies such as batteries and air traffic management.
Despite the promises of AAM, there are still significant challenges to overcome. Those include regulatory and policy advancements, robust and scalable air traffic management systems, changes in urban planning to accommodate vertiports, and gaining public trust. The empirical analysis leveraged the combined knowledge and expertise of the authors in urban planning, intelligent transportation systems, and piloting commercial aircraft. The authors proposed a practical and actionable deployment framework, specifically designed for a less complex use case than urban air mobility, which is a self-contained corporate environment. The authors focused on the pragmatic aspects of introducing eVTOL services, including strategic facility selection, route planning, terrain mapping, and efficient aircraft selection. The cost estimate provides vital input for early-phase financial planning. The scenario presented fully aligned with the FAA’s special airworthiness criteria and offers valuable insights for policymakers and stakeholders. However, the focus on a specific use case has its limitations. Hence, in future work the authors plan to explore the applicability of the framework to more general scenarios.
Author Contributions
Conceptualization, R.B. and S.W.; methodology, R.B. and S.W.; software, S.W.; validation, R.B., S.W., and D.T.; formal analysis, S.W.; investigation, R.B.; resources, D.T.; data curation, R.B.; writing—original draft preparation, R.B.; writing—review and editing, R.B.; visualization, R.B.; supervision, D.T.; project administration, D.T.; funding acquisition, D.T. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the United States Department of Transportation, grant number Mountain Plains Consortium.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest. Furthermore, this work does not reflect any policies or intentions of GM. This large corporate facility in Detroit conveniently served as a use case to illustrate how each component of the proposed practical deployment framework would apply.
References
- Goyal, R.; Reiche, C.; Fernando, C.; Cohen, A. Advanced air mobility: Demand analysis and market potential of the airport shuttle and air taxi markets. Sustainability 2021, 13, 7421. [Google Scholar] [CrossRef]
- Judson, F.; Zehnder, K.; Bychek, J.; Rosario, R.D.; Albjerg, G.; Kigel, B.; Kish, S.; Evans, R.; Gorrin-Rivas, F.; Block, J.; et al. Ohio AAM Framework; Ohio Department of Transportation: Columbus, OH, USA, 2022. [Google Scholar]
- Kalakou, S.; Marques, C.; Prazeres, D.; Agouridas, V. Citizens’ attitudes towards technological innovations: The case of urban air mobility. Technol. Forecast. Soc. Chang. 2023, 187, 122200. [Google Scholar] [CrossRef]
- FAA. Airworthiness Criteria: Special Class Airworthiness Criteria for the Joby Aero, Inc. Model JAS4-1 Powered-Lift; Federal Aviation Administration: Washington, DC, USA, 2022. [Google Scholar]
- FAA. Urban Air Mobility (UAM) Concept of Operations v2.0; Federal Aviation Administration (FAA): Washington, DC, USA, 2023. [Google Scholar]
- Wang, L.; Deng, X.; Gui, J.; Jiang, P.; Zeng, F.; Wan, S. A review of Urban Air Mobility-enabled Intelligent Transportation Systems: Mechanisms, applications and challenges. J. Syst. Archit. 2023, 141, 102902. [Google Scholar] [CrossRef]
- Smirnov, A.; Smolokurov, E.; Bolshakov, R.; Parshin, V. Problems and Prospects for the Development of Urban Airmobility on the Basis of Unmanned Transport Systems. Transp. Res. Procedia 2023, 68, 151–159. [Google Scholar] [CrossRef]
- Pertz, J.; Niklaß, M.; Swaid, M.; Gollnick, V.; Kopera, S.; Schunck, K.; Baur, S. Estimating the Economic Viability of Advanced Air Mobility Use Cases: Towards the Slope of Enlightenment. Drones 2023, 7, 75. [Google Scholar] [CrossRef]
- Raghunatha, A.; Thollander, P.; Barthel, S. Addressing the emergence of drones—A policy development framework for regional drone transportation systems. Transp. Res. Interdiscip. Perspect. 2023, 18, 100795. [Google Scholar] [CrossRef]
- Dolan, A.; Thomphson, R.M., II. Integration of Drones into Domestic Airspace: Selected Legal Issues; Congressional Research Service: Washington, DC, USA, 2013. [Google Scholar]
- Aweiss, A.; Homola, J.; Rios, J.; Jung, J.; Johnson, M.; Mercer, J.; Modi, H.; Torres, E.; Ishihara, A. Flight Demonstration of Unmanned Aircraft System (UAS) Traffic Management (UTM) at Technical Capability Level 3. In Proceedings of the 2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), San Diego, CA, USA, 8–12 September 2019. [Google Scholar]
- Northern Plains UAS Test Site. Flights. 30 November 2022. Available online: https://www.npuasts.com/services/flights (accessed on 1 June 2023).
- Ohio UAS Center. SkyVision. 30 November 2022. Available online: https://uas.ohio.gov/skyvision (accessed on 1 June 2023).
- Panagiotakopoulos, D.; Williamson, A.; Petrunin, I.; Harman, S.; Quilter, T.; Williams-Wynn, I.; Goudie, G.; Watson, N.; Vernall, P.; Reid, J.; et al. Developing Drone Experimentation Facility: Progress, Challenges and cUAS Consideration. In Proceedings of the 2021 21st International Radar Symposium (IRS), Berlin, Germany, 21–22 June 2021. [Google Scholar]
- Alcaron, V.; Garcia, M.; Alcaron, F.; Viguria, A.; Martinez, A.; Janisch, D.; Acevedo, J.; Maza, I.; Ollero, A. Procedures for the Integration of Drones into the Airspace Based on U-Space Services. Aerospace 2020, 7, 128. [Google Scholar]
- Treeck, H. Volocopter Air Taxi Flies Over Singapore’s Marina Bay. 22 October 2019. Available online: https://www.volocopter.com/newsroom/volocopter-air-taxi-flies-over-singapores-marina-bay/ (accessed on 1 June 2023).
- MundoGEO. Vertiport in Paris Region Begins Testing eVTOLs in Anticipation of the 2024 Olympics. 11 November 2022. Available online: https://mundogeo.com/en/2022/11/14/vertiport-in-paris-region-begins-testing-evtols-in-anticipation-of-the-2024-olympics/ (accessed on 1 June 2023).
- Garrow, L.A.; German, B.J.; Leonard, C.E. Urban air mobility: A comprehensive review and comparative analysis with autonomous and electric ground transportation for informing future research. Transp. Res. Part C Emerg. Technol. 2021, 132, 103377. [Google Scholar] [CrossRef]
- Schweiger, K.; Preis, L. Urban Air Mobility: Systematic Review of Scientific Publications and Regulations for Vertiport Design and Operations. Drones 2022, 6, 179. [Google Scholar] [CrossRef]
- Mathur, A.; Panesar, K.; Kim, J.; Atkins, E.M.; Sarter, N. Paths to autonomous vehicle operations for urban air mobility. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019. [Google Scholar]
- Al-Rubaye, S.; Tsourdos, A.; Namuduri, K. Advanced Air Mobility Operation and Infrastructure for Sustainable Connected eVTOL Vehicle. Drones 2023, 7, 319. [Google Scholar] [CrossRef]
- American Aerospace Technologies, Inc. AiRanger™ UAS NASA SIO Program Final Report; National Aeronautics and Space Administration (NASA): Hampton, VA, USA, 2022. [Google Scholar]
- Tang, H.L.; Zhang, Y.; Mohmoodian, V.; Charkhgard, H. Automated flight planning of high-density urban air mobility. Transp. Res. Part C 2021, 131, 103324. [Google Scholar] [CrossRef]
- Nordstrom, W.; Maven Research. Optimal Locations for Air Mobility Vertiports; NASA Technical Reports: Portsmouth, NH, USA, 2022. [Google Scholar]
- Willey, L.C.; Salmon, J.L. A method for urban air mobility network design using hub location and subgraph isomorphism. Transp. Res. Part C Emerg. Technol. 2021, 125, 102997. [Google Scholar] [CrossRef]
- Bruesberg, P.; Doberts, A.C.; Jansen, T.M.; Witt, T. Landing Platform for Urban Air Mobility Vehilces Integrated into Parking Lot Infrastructure in Densely Built-Up Areas. In Proceedings of the 32nd Congress of the International Council of the Aeronautical Sciences (ICAS), Shanghai, China, 6–10 September 2021. [Google Scholar]
- Roa, J.; Lima, M. Feasibility Study of Operational Landscape and Infrastructure Needs in Regional Air Mobility. In Proceedings of the International Conference on Transportation and Development 2022, Seattle, WA, USA, 31 May–3 June 2022. [Google Scholar]
- Li, X. Repurposing Existing Infrastructure for Urban Air Mobility: A Scenario Analysis in Southern California. Drones 2023, 7, 37. [Google Scholar] [CrossRef]
- Ribeiro, J.K.; Borille, G.M.R.; Caetano, M.; Silva, E.J.d. Repurposing urban air mobility infrastructure for sustainable transportation in metropolitan cities: A case study of vertiports in São Paulo, Brazil. Sustain. Cities Soc. 2023, 2023, 104797. [Google Scholar] [CrossRef]
- Cox, K.E. eVTOLs and vertiports: Operations and infrastructure for a new and sustainable way to fly. J. Airpt. Manag. 2023, 17, 16–17. [Google Scholar]
- Espejo-Díaz, J.A.; Alfonso-Lizarazo, E.; Montoya-Torres, J.R. A heuristic approach for scheduling advanced air mobility aircraft at vertiports. Appl. Math. Model. 2023, 123, 871–890. [Google Scholar] [CrossRef]
- Preis, L. Estimating vertiport passenger throughput capacity for prominent eVTOL designs. CEAS Aeronaut. J. 2023, 14, 353–368. [Google Scholar] [CrossRef]
- Vascik, P.D.; Hansman, J.R. Allocation of Airspace Cutouts to Enable Procedurally Separated Small Aircraft Operations in Terminal Areas; MIT International Center for Air Transportation (ICAT): Cambridge, MA, USA, 2020. [Google Scholar]
- General Motors. GM in the US. 7 January 2023. Available online: https://www.gm.com/company/usa-operations (accessed on 1 June 2023).
- Lienert, P.; Klayman, B. Sky’s the Limit: GM Unveils Autonomous Flying Cadillac. 14 January 2021. Available online: https://www.weforum.org/agenda/2021/01/general-motors-flying-cadillac-futuristic-vehicle (accessed on 1 June 2023).
- Boldmethod. How Low Can You Go? Your Guide To Minimum VFR Altitudes. 13 January 2022. Available online: https://www.boldmethod.com/learn-to-fly/regulations/minimum-vfr-altitudes-how-low-can-you-legally-fly-visual/ (accessed on 1 June 2023).
- Bell, L.; Mastick, B. Terrain Avoidance Plan Safety Brief. 2006. Available online: https://www.aopa.org/-/media/Files/AOPA/Home/News/All-News/2004/Terrain-Avoidance-Plan-TAP-br/tap.p (accessed on 1 June 2023).
- Cornell Law School. 14 CFR § 91.119—Minimum Safe Altitudes: General; Cornell Law School: Ithaca, NY, USA, 2010. [Google Scholar]
- Tran, T.-H.; Nguyen, D.-D. Management and Regulation of Drone Operation in Urban Environment: A Case Study. Soc. Sci. 2022, 11, 474. [Google Scholar] [CrossRef]
- Howell, D.W.; King, J.; Chen, A. Measuring the impacts of the ADS-B surveillance in the Gulf of Mexico. In AIAA Aviation 2022 Forum; Session: Aviation Emissions and Efficiency: Chicago, IL, USA, 2022. [Google Scholar]
- Loffi, J.M.; Wallace, R.J.; Jacob, J.D.; Dunlap, J.C. Seeing the Threat: Pilot Visual Detection of Small Unmanned Aircraft Systems in Visual Meteorological Conditions. Int. J. Aviat. Aeronaut. Aerosp. 2016, 3, 13. [Google Scholar] [CrossRef]
- Siegel, A.I.; Federman, P. Development of a Paint Scheme for Increasing Aircraft Detectability and Visibility. J. Appl. Psychol. 1965, 49, 93–105. [Google Scholar] [CrossRef]
- Kumar, N.; Dixit, A. Camouflage and Stealth Technology Based on Nanomaterials. Nanotechnol. Def. Appl. 2019, 2019, 155–203. [Google Scholar]
- Bridgelall, R.; Askarzadeh, T.; Tolliver, D. Introducing an Efficiency Index to Evaluate eVTOL Designs. Technol. Forecast. Soc. Change 2023, 191, 122539. [Google Scholar] [CrossRef]
- Robinson, J.N.; Sokollek, M.-D.; Justin, C.Y.; Mavris, D.N. Development of a Methodology for Parametric Analysis of STOL airpark geo-density. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- Taylor, M.; Saldanli, A.; Park, A. Design of a Vertiport Tool. In Proceedings of the 2020 Integrated Communications Navigation, Fairfax, VA, USA, 8–10 September 2020. [Google Scholar]
- Badakis, G.; Koutsoubelias, M.; Lalis, S. Robust Precision Landing for Autonomous Drones. In Proceedings of the 2021 IEEE Sensors Applications Symposium (SAS), Sundsvall, Sweden, 23–25 August 2021. [Google Scholar]
- Alam, S.; Oluoch, J. A survey of safe landing zone detection techniques for autonomous unmanned aerial vehicles (UAVs). Expert Syst. Appl. 2021, 179, 115091. [Google Scholar] [CrossRef]
- Zelinski, S. Operational Analysis of Vertiport Surface Topology. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–15 October 2020. [Google Scholar]
- Dimensions.com. 90° Parking Spaces. 2022. Available online: https://www.dimensions.com/element/90-degree-parking-spaces-layouts (accessed on 1 June 2023).
- Aretxabaleta, I.; De Alegria, I.M.; Andreu, J.; Kortabarria, I.; Robles, E. High-Voltage Stations for Electric Vehicle Fast-Charging: Trends, Standards, Charging Modes and Comparison of Unity Power-Factor Rectifiers. IEEE Access 2021, 9, 102177–102194. [Google Scholar] [CrossRef]
- Narasipuram, R.P.; Mopidevi, S. A technological overview & design considerations for developing electric vehicle charging stations. J. Energy Storage 2021, 43, 103225. [Google Scholar]
- Rajendran, G.; Vaithilingam, C.A.; Misron, N.; Naidu, K.; Ahmed, R. A comprehensive review on system architecture and international standards for electrical vehicle charging stations. J. Energy Storage 2021, 42, 103099. [Google Scholar] [CrossRef]
- Preston, J.R.; Troutman, S.; Keen, E.; Silva, M.; Whitman, N.; Calvert, M.; Cardome, M.; Moulton, M.; Ferguson, S.W. Rotorwash Operational Footprint Modeling; Missile Research Development and Engineering Center, Missile Guidance Directorate: Redstone Arsenal, AL, USA, 2014. [Google Scholar]
- Helitowcart. V201 with R44—Helicopter Dolly by Helitowcart. 2014. Available online: https://www.youtube.com/watch?v=RE6teGg9jZk (accessed on 1 June 2023).
- Applied Research Associates Inc. Rigid and Flexible Pavement Aircraft Tie-Downs; Air Force Research Laboratory, Materials, and Manufacturing Directorate: Tyndall Air Force Base, FL, USA, 2010. [Google Scholar]
- Mohamed, A.; Marino, M.; Watkins, S.; Jaworski, J.; Jones, A. Gusts Encountered by Flying Vehicles in Proximity to Buildings. Drones 2023, 7, 22. [Google Scholar] [CrossRef]
- Hu, P.T.; Nelson, B.; Nesmith, B.L.; Williams, K.W. Annotated Bibliography (1997–2021): Crew and Staffing Requirements of Unmanned Aircraft Systems in Air Carrier Operations; Federal Aviation Administration: Oklahoma City, OK, USA, 2022. [Google Scholar]
- Joby Aviation, Inc. United States Securities and Exchange Commission Form 10-K.; Joby Aviation, Inc.: Santa Cruz, CA, USA, 2023. [Google Scholar]
Figure 1.
Methodological flow of the deployment framework with results and conclusions.
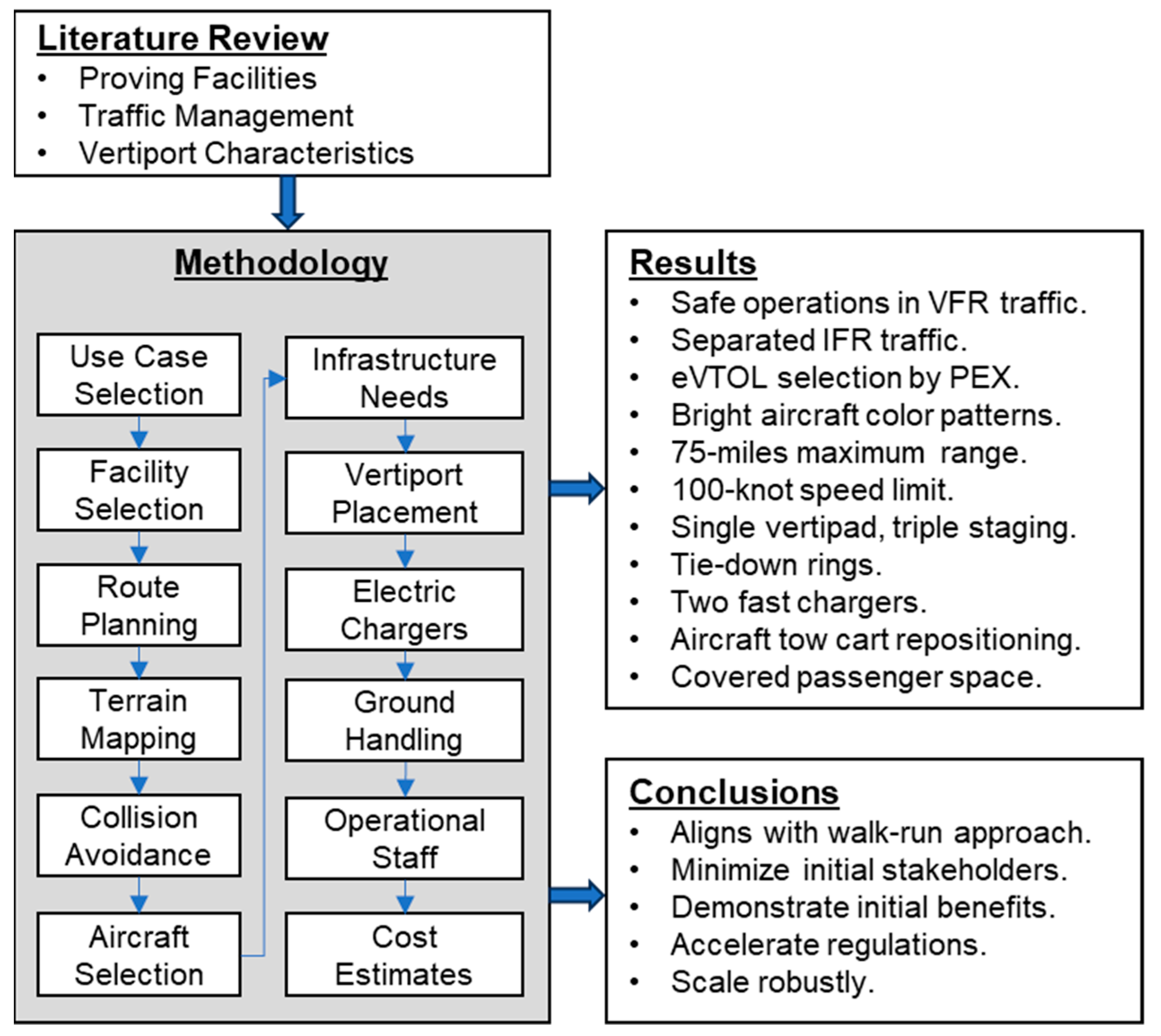
Figure 2.
GM facility locations relative to vertical airspace constraints.

Figure 3.
ForeFlight screenshot of route plan from facility 4 to 3 and vertical clearances.

Figure 4.
Vertical segment of suitable airspace that AAM flight and crewed VFR traffic can share.

Figure 5.
Hybrid landing pad with three staging areas.

Figure 6.
Available lots for vertiport placement on each of the six GM sites selected.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Six General Motors facility locations with addresses and airspace constraints.
| Site | Facility Name | Listed Address | Airspace Constraints |
|---|---|---|---|
| 1. | Davison Road Processing Center | 4134 Davison Road Burton, Michigan 48509 | Class C airspace begins at 2100 ft. |
| 2. | Detroit Renaissance Center Global HQ | 300 Renaissance Center Detroit, MI 48243 | Class B airspace begins at 3000 ft. |
| 3. | Global Technical Center | GM Tech Center Rd Warren, MI 48092 | Class B airspace begins at 4000 ft. |
| 4. | Lansing Delta Township/ Regional Stamping | 8175 Millett Hwy Lansing, Michigan 48917 | Class C airspace begins at 2100 ft. |
| 5. | Milford Proving Ground | 3300 General Motors Road Milford, Michigan 48380 | Class B airspace begins at 6000 ft. |
| 6. | Orion Assembly | 4555 Giddings Road Lake Orion, MI 48359 | None. |
Table 2.
Charging capabilities.
| Feature | Level 1 Charger | Level 2 Charger | Level 3 Charger |
|---|---|---|---|
| Voltage | 120 V AC | 240 V AC/19.2 kW | 500 V DC/300 A |
| Application | Personal | Personal/Commercial | Industrial |
| Charge Time | 8–16 h | 4–6 h | <30 min |
| Installed Cost | USD 300–1500 | USD 400–6500 | USD 30,000–60,000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Bridgelall, R.; White, S.; Tolliver, D. Integrating Electric Vertical Takeoff and Landing Aircraft into Public Airspace: A Scenario Study. Future Transp. 2023, 3, 1029-1045. https://doi.org/10.3390/futuretransp3030057
AMA Style
Bridgelall R, White S, Tolliver D. Integrating Electric Vertical Takeoff and Landing Aircraft into Public Airspace: A Scenario Study. Future Transportation. 2023; 3(3):1029-1045. https://doi.org/10.3390/futuretransp3030057
Chicago/Turabian StyleBridgelall, Raj, Shawn White, and Denver Tolliver. 2023. "Integrating Electric Vertical Takeoff and Landing Aircraft into Public Airspace: A Scenario Study" Future Transportation 3, no. 3: 1029-1045. https://doi.org/10.3390/futuretransp3030057