
HetroTraffSim: A Macroscopic Heterogeneous Traffic Flow Simulator for Road Bottlenecks

 ,
, 
Abstract
1. Introduction
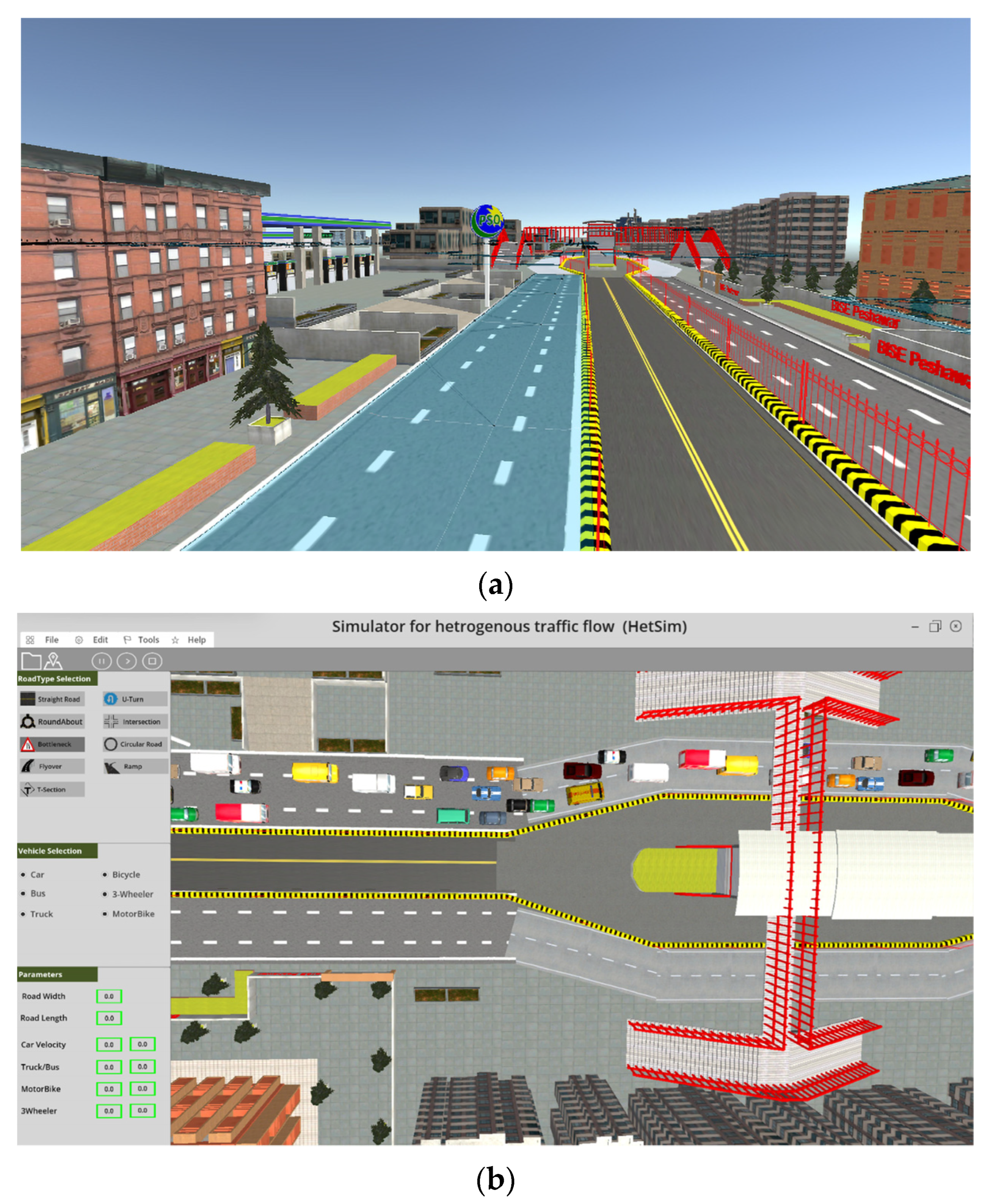
- Macroscopic heterogeneous traffic flow can be simulated at road bottlenecks.
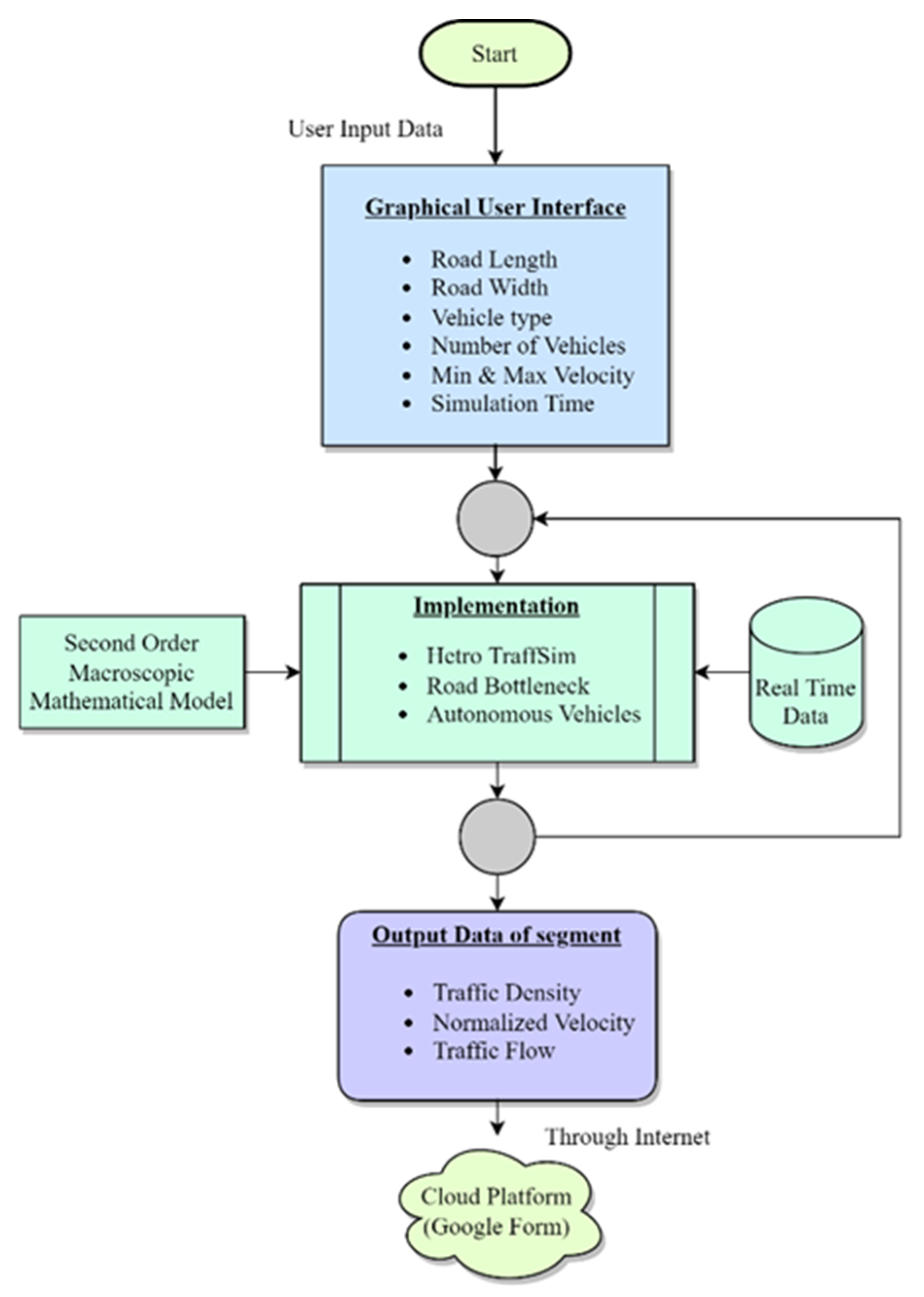
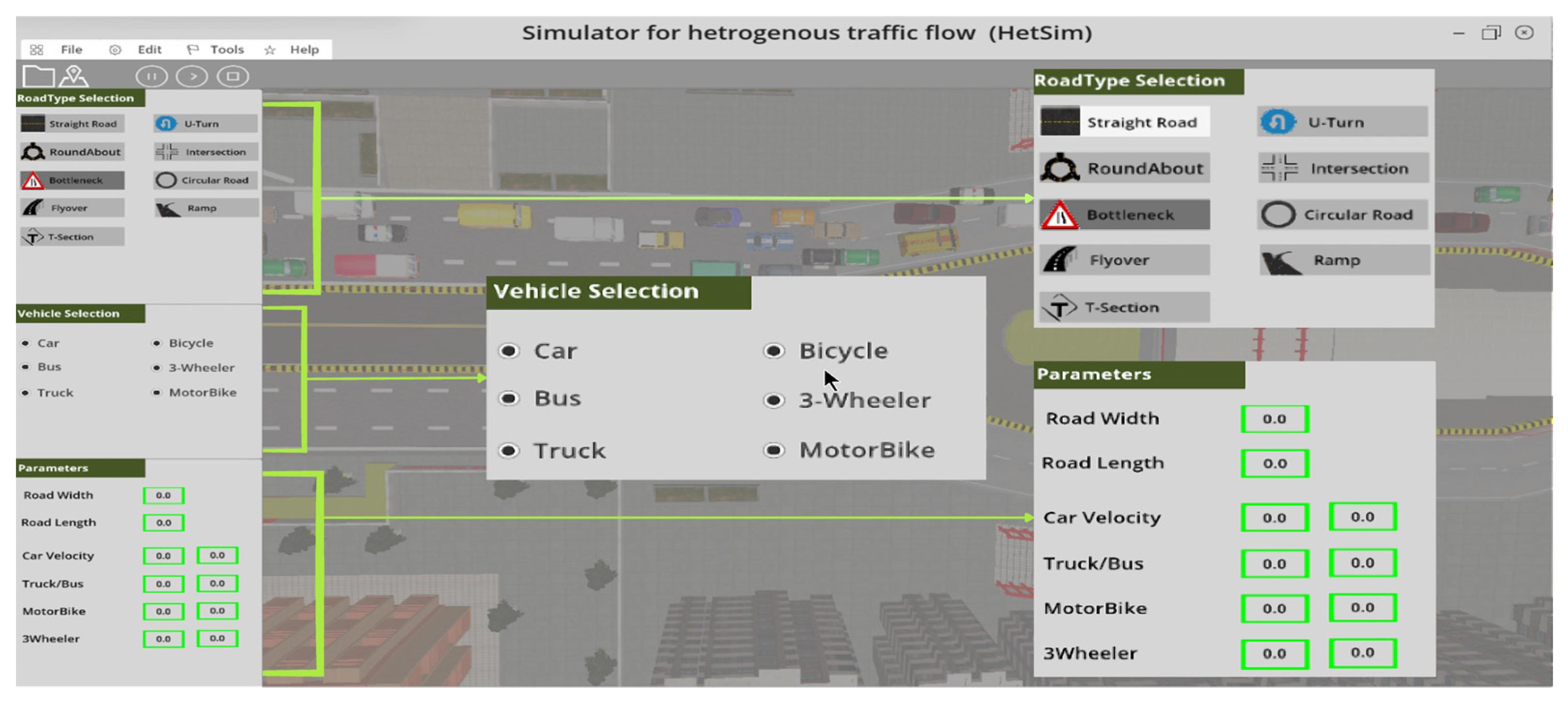
- The user-friendly Graphical User Interface (GUI) can be used to create realistic traffic scenarios using parameters such as road width and length, number and types of vehicles, time and distance headways, and minimum and maximum velocities.
- It can be used to predict traffic density, average velocity, and average flow temporally and spatially.
- The critical density of a road can be determined.
2. Related Work
3. HetroTraffSim Software Framework
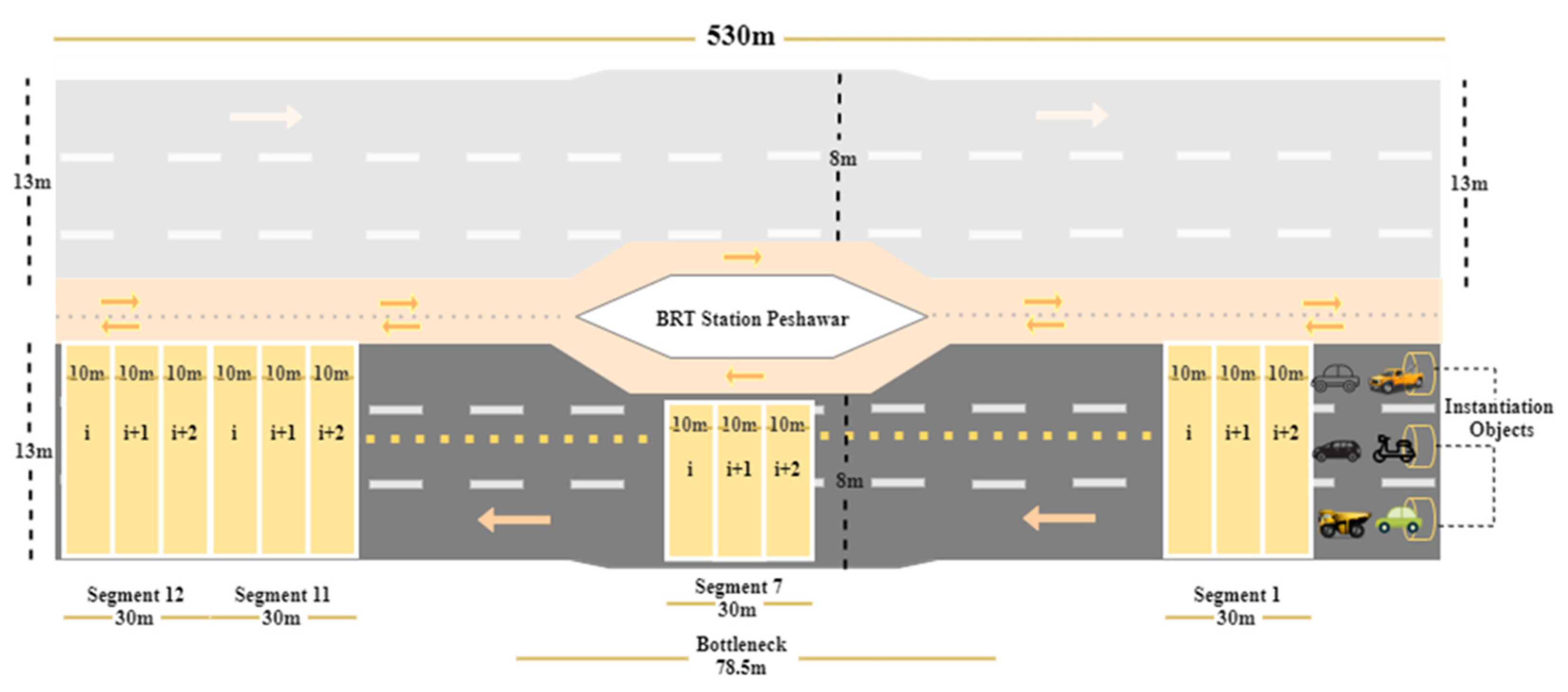
3.1. Road Infrastructure
3.2. Vehicular Flow
- Maximum and minimum delay (the minimum and maximum arrival rate of vehicles to a road section).
- Spawning time (between minimum and maximum delay).
- Spawning vehicle type (as in Table 1).
- Instantiation number (to differentiate between agents).
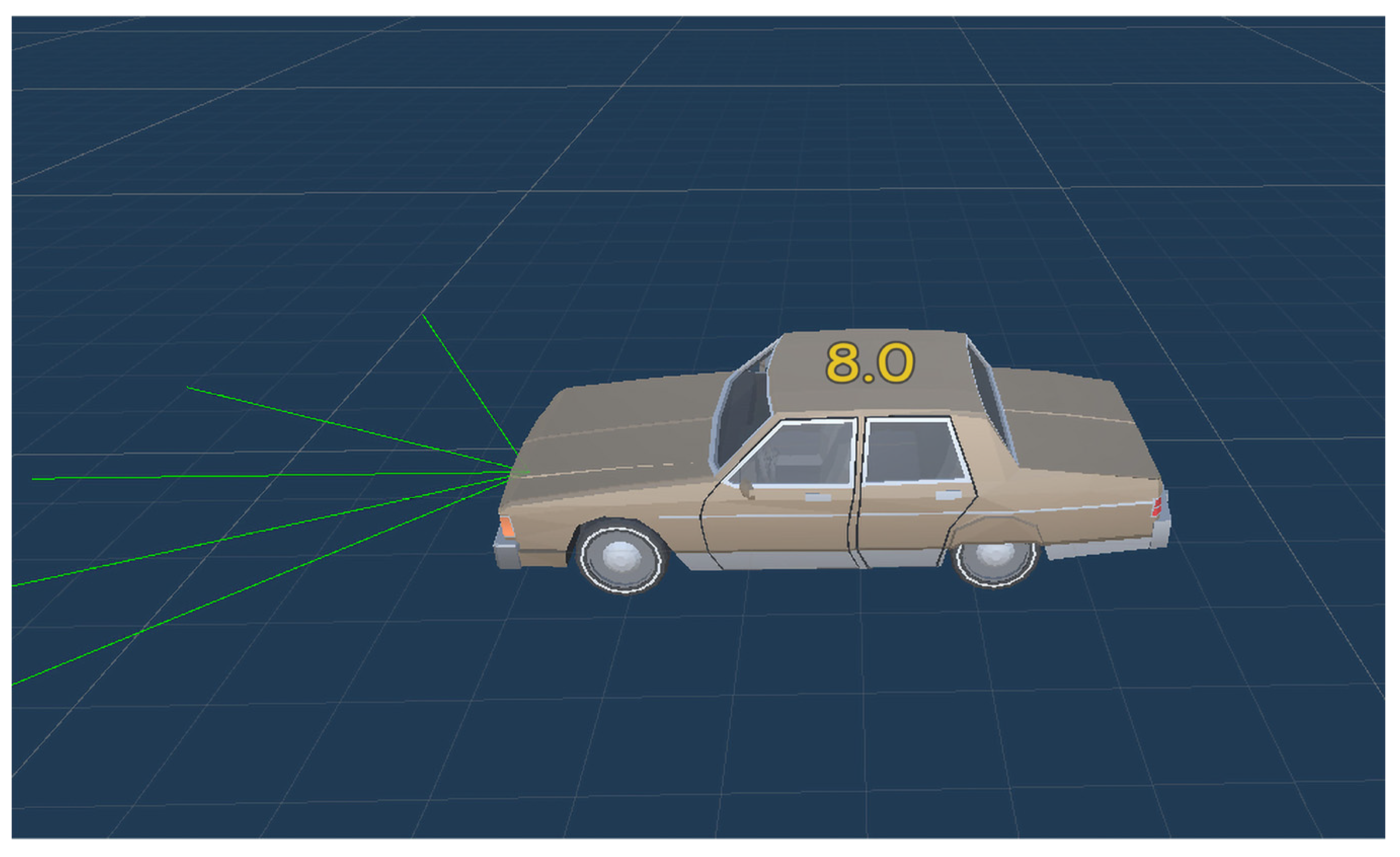
- A NavMesh agent provides agent (vehicle) road maneuvering and obstacle avoidance capabilities. The agent maneuvers on the NavMesh surface and the NavMesh agent allows vehicles to find appropriate paths.
- A NavMesh obstacle is attached to each obstacle for avoidance purposes. If it is a stationary obstacle then the NavMesh agent will avoid it, and if it is a moving obstacle a hole will be created in the NavMesh surface which can be updated for the agent to avoid.
3.3. Macroscopic Traffic Flow Model
4. Simulation and Results
4.1. Simulation Setup
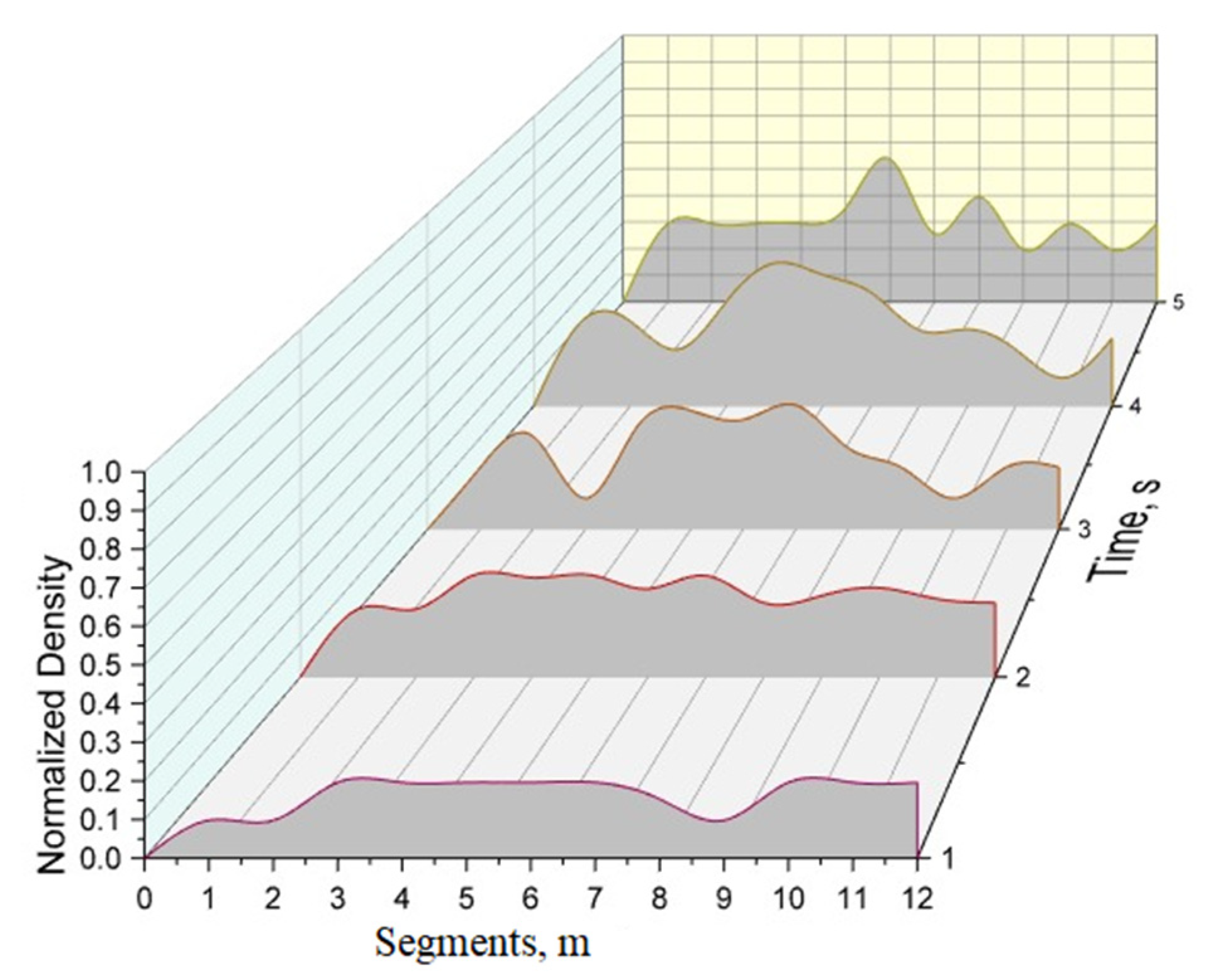
4.2. Spatial and Temporal Traffic Normalized Density
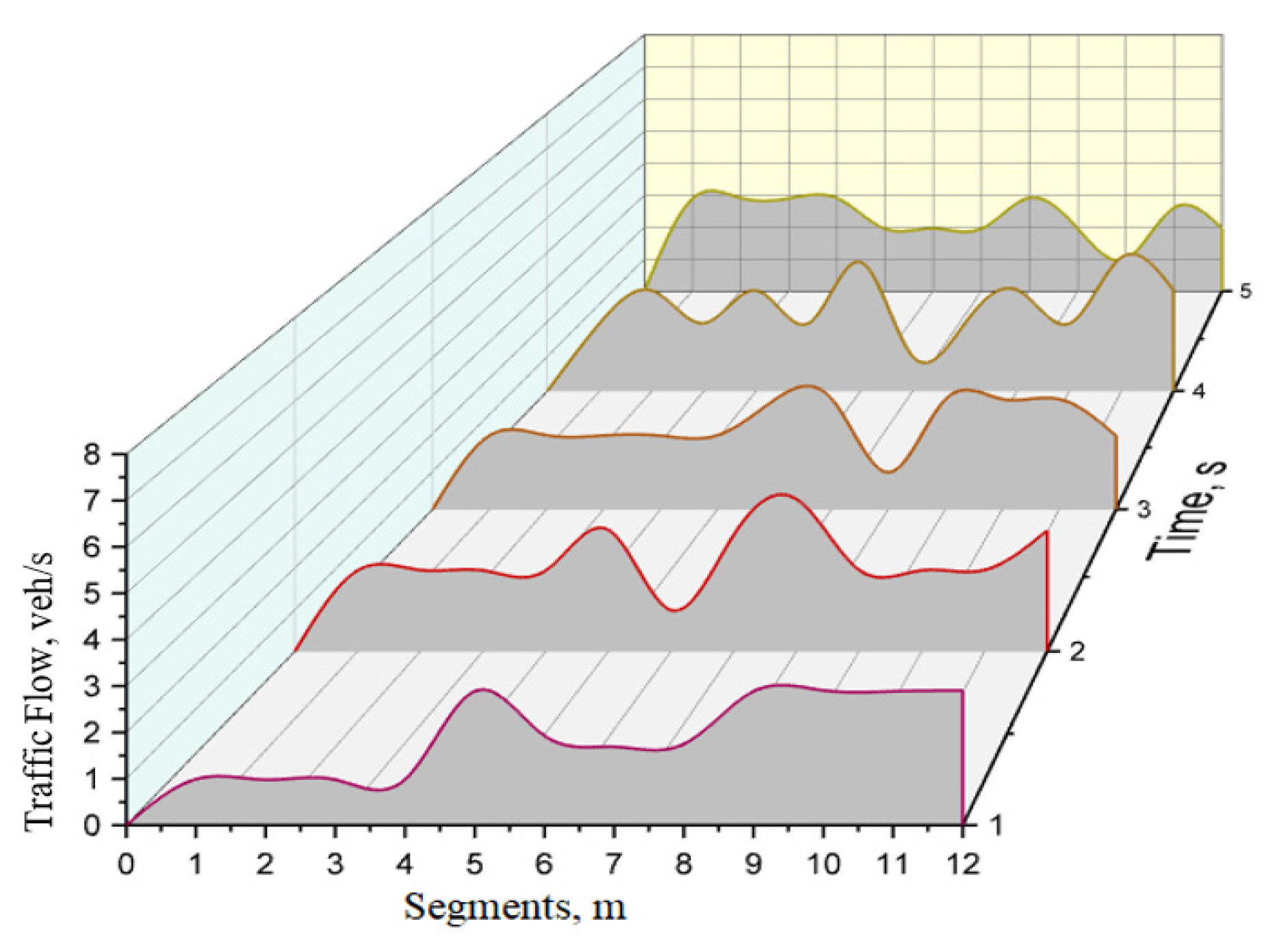
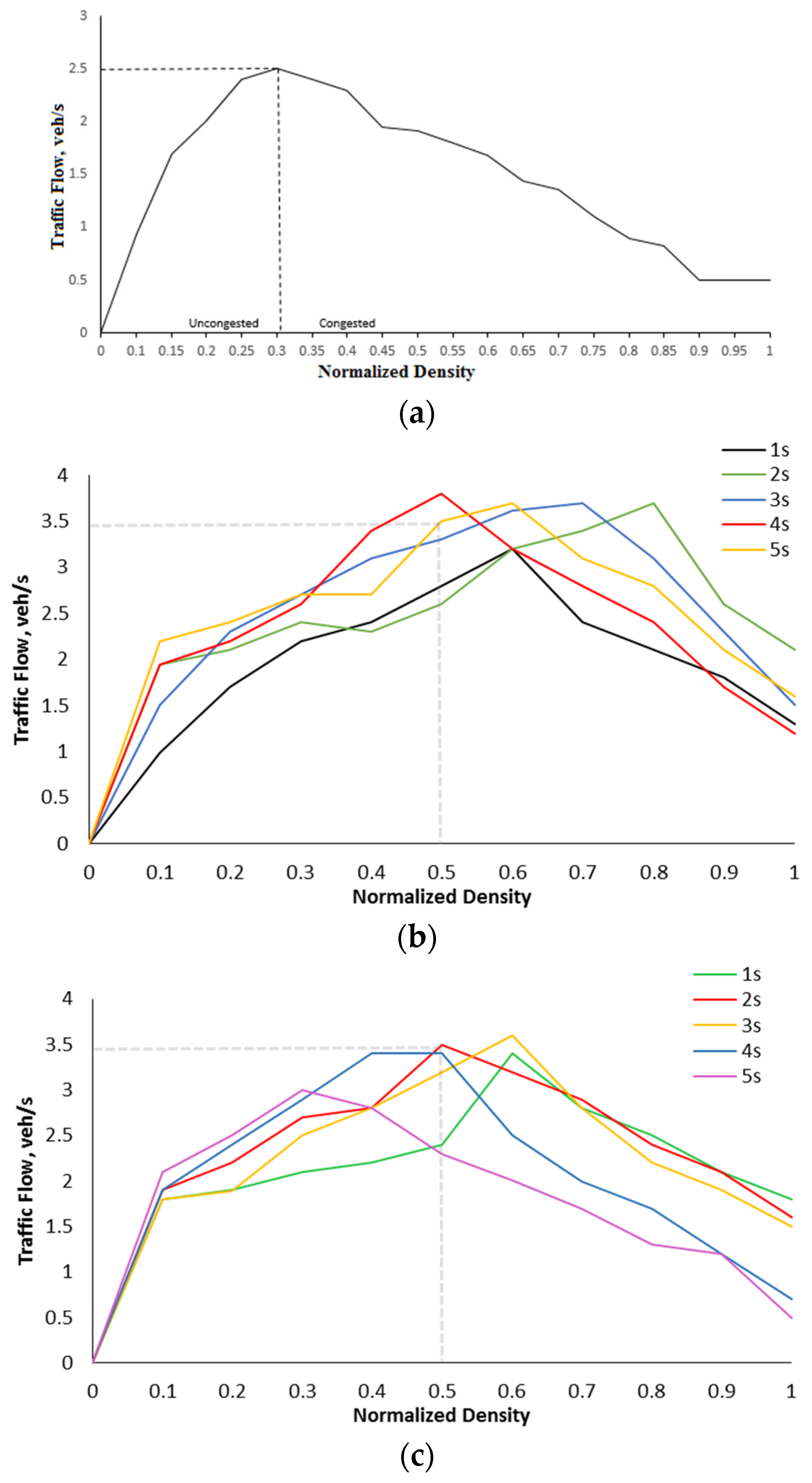
4.3. Spatial and Temporal Traffic Flow
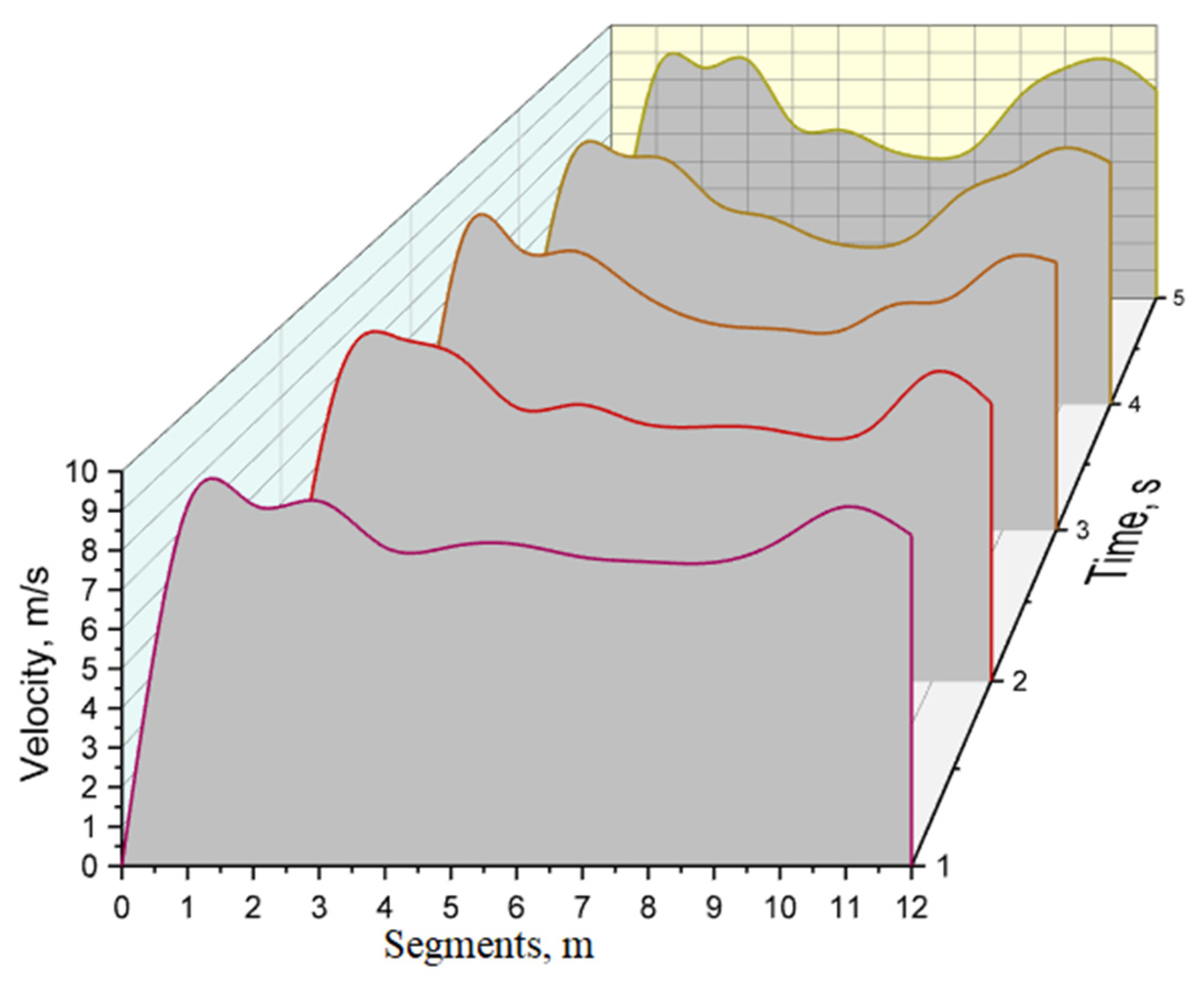
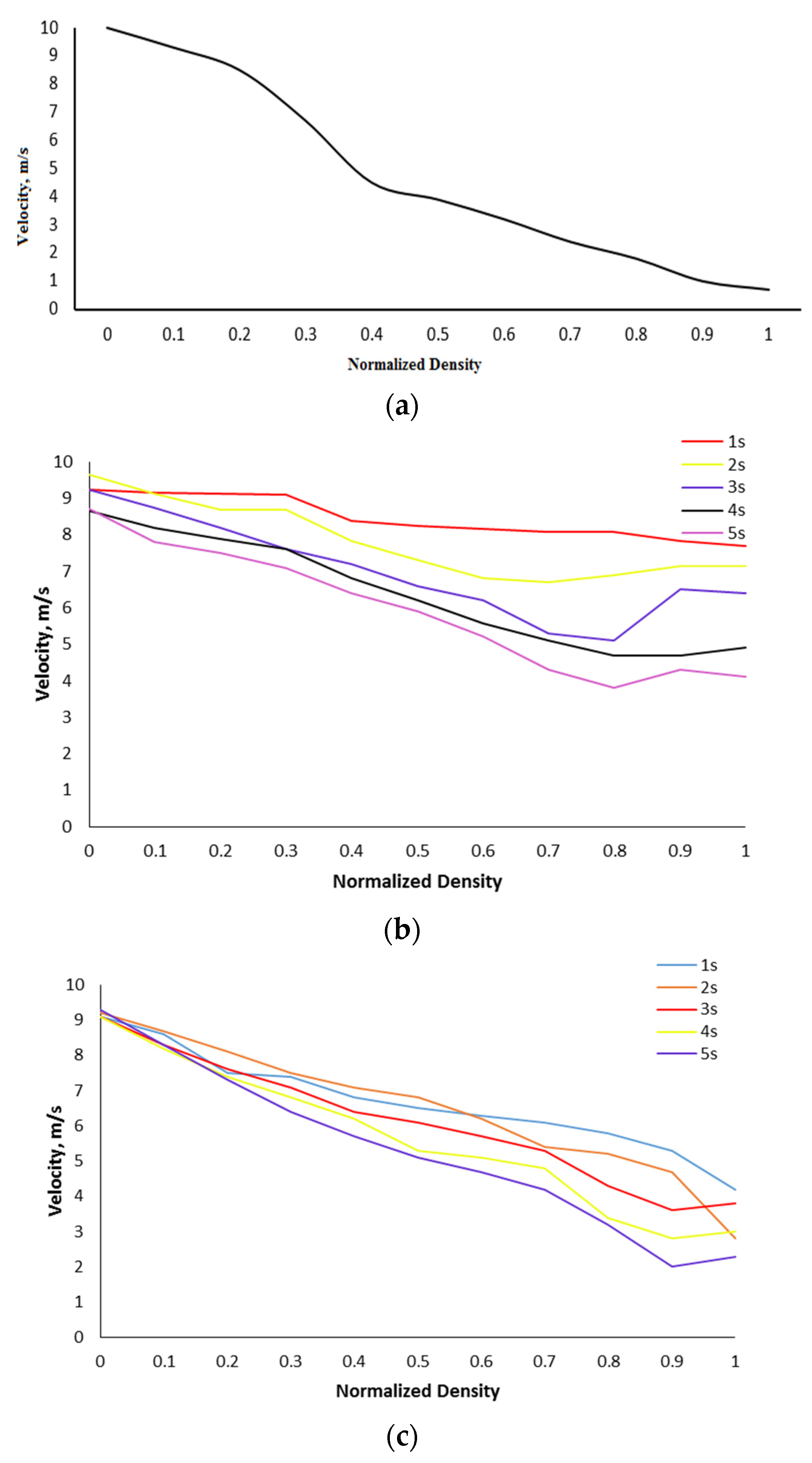
4.4. Spatial and Temporal Normalized Traffic Velocity
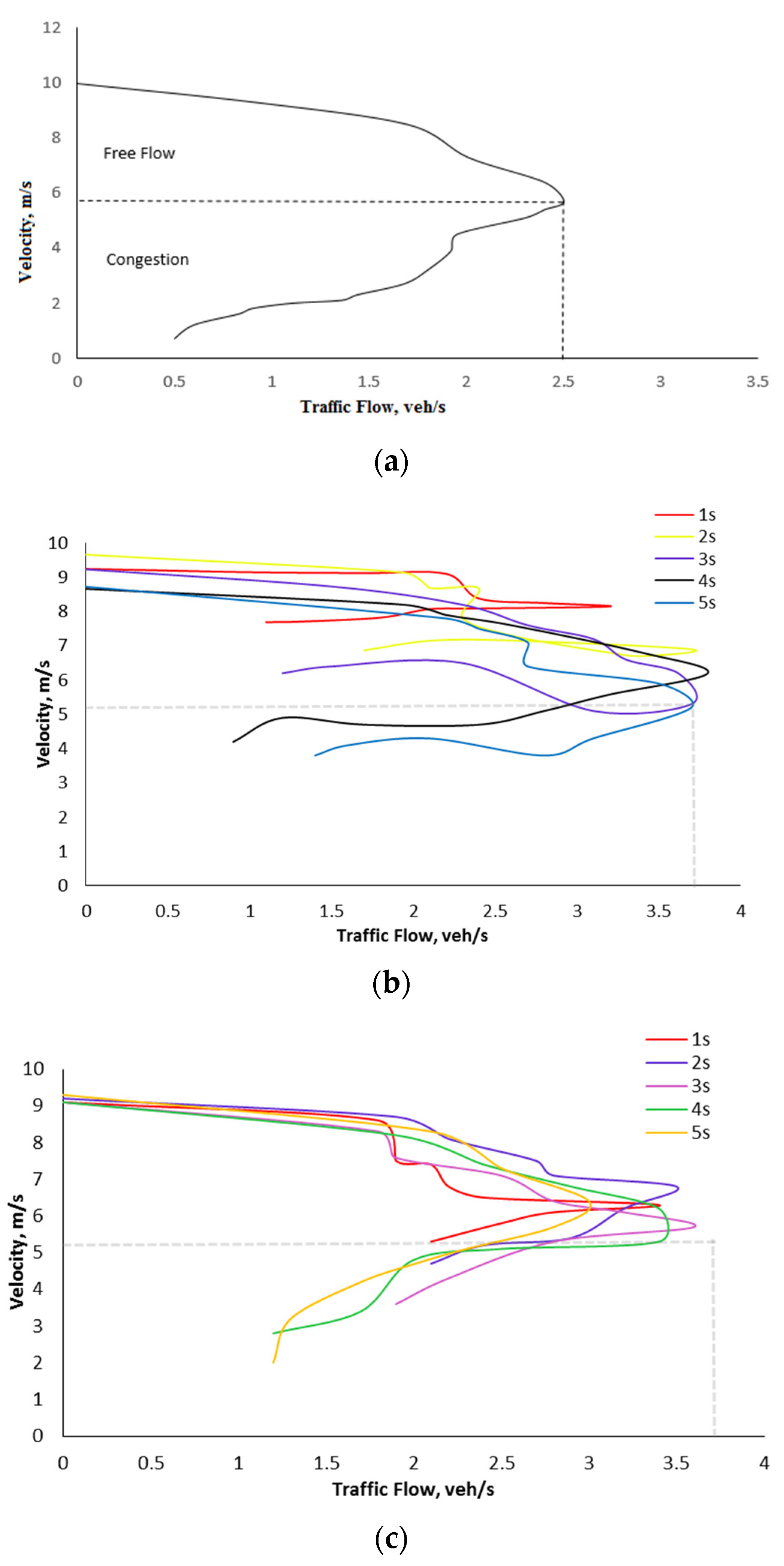
4.5. Fundamental Diagrams
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- United Nations. World Urbanization Prospects. February 2021. Available online: https://www.un.org/development/desa/en/news/population/2018-revision-of-world-urbanization-prospects.html (accessed on 1 February 2021).
- Ali, K.; Khattak, K.S.; Khan, Z.H.; Gulliver, T.; Imran, W.; Minallah, N. Internet-of-video things based real-time traffic flow characterization. EAI Endorsed Trans. Scalable Inf. Syst. 2021, 8, e9. [Google Scholar]
- Tanzina, A.; Yodo, N. A survey of road traffic congestion measures towards a sustainable and resilient transportation system. Sustainability 2020, 12, 4660. [Google Scholar]
- Shehzad, K.K.; Minallah, N.; Khan, Z.H.; Khan, M.A.; Khan, A.N.; Ayaz, S. Sensing technologies for traffic flow characterization: From heterogeneous traffic perspective. J. Appl. Eng. Sci. 2022, 20, 29–40. [Google Scholar]
- Rehmat, U.M.; Khattak, K.S.; Khan, Z.H.; Khan, M.N.; Minallah, N.; Khan, A.N. Vehicular traffic simulation software: A systematic comparative analysis. Pak. J. Eng. Technol. 2021, 4, 66–78. [Google Scholar]
- Thamizh, A.V.; Dhivya, G. Simulation of highly heterogeneous traffic flow characteristics. In Proceedings of the European Conference on Modelling and Simulation, Kuala Lumpur, Malaysia, 1–4 June 2010; pp. 81–87. [Google Scholar]
- Khan, Z.H. Traffic Modelling for Intelligent Transportation Systems. Ph.D. Thesis, Department of Electrical and Computer Engineering, University of Victoria, Victoria, BC, Canada, 2016. Available online: https://dspace.library.uvic.ca/bitstream/handle/1828/7152/Khan_Zawar_PhD_2016.pdf?sequence=1&isAllowed=y (accessed on 15 June 2021).
- Ye, L.; Xu, C.; Xing, L.; Wang, W. Integrated cooperative adaptive cruise and variable speed limit controls for reducing rear-end collision risks near freeway bottlenecks based on micro-simulations. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3157–3167. [Google Scholar]
- Rui, S.; Sun, J. Calibration of a micro-traffic simulation model with respect to the spatial-temporal evolution of expressway on-ramp bottlenecks. Simulation 2016, 92, 535–546. [Google Scholar]
- Narayana, R.; Arkatkar, S.; Joshi, G. Examining effect of bottleneck on multi-lane roads at midblock sections using simulation. In Proceedings of Urbanization Challenges in Emerging Economies: Energy and Water Infrastructure; Transportation Infrastructure; and Planning and Financing; American Society of Civil Engineers: Reston, VA, USA, 2018; pp. 697–705. [Google Scholar]
- Qu, D.; Liu, H.; Song, H.; Meng, Y. Extraction of catastrophe boundary and evolution of expressway traffic flow state. Appl. Sci. 2022, 12, 6291. [Google Scholar] [CrossRef]
- Rahimi, A.M.; Dulebenets, M.A.; Mazaheri, A. Evaluation of microsimulation models for roadway segments with different functional classifications in northern Iran. Infrastructures 2021, 6, 46. [Google Scholar] [CrossRef]
- Alghamdi, T.; Mostafi, S.; Abdelkader, G.; Elgazzar, K. A comparative study on traffic modeling techniques for predicting and simulating traffic behavior. Future Internet 2022, 14, 294. [Google Scholar] [CrossRef]
- Kim, S.; Suh, W.; Kim, J. Traffic simulation software: Traffic flow characteristics in CORSIM. In Proceedings of the International Conference on Information Science & Applications, Seoul, Republic of Korea, 6–9 May 2014. [Google Scholar] [CrossRef]
- Jayasinghe, T.; Sivakumar, T.; Kumarge, A.S. Calibration of SUMO microscopic simulator for Sri Lankan traffic conditions. In Proceedings of the Eastern Asia Society for Transportation Studies, Tokyo, Japan, 12–15 September 2021; Volume 13. [Google Scholar]
- Vuong, X.C.; Mou, R.-F.; Hung, T.V.; Thuat, V.T. An analysis of urban traffic incident under mixed traffic conditions based on Sumo: A case study of Hanoi. Int. J. Adv. Res. Eng. Technol. 2020, 11, 573–581. [Google Scholar]
- Malik, F.; Khattak, H.A.; Shah, M.A. Evaluation of the impact of traffic congestion based on SUMO. In Proceedings of the International Conference on Automation and Computing, Lancaster, UK, 5–7 September 2019. [Google Scholar]
- Automobile Dimension, Pick-Up Vehicles. October 2021. Available online: https://www.automobiledimension.com/pick-up-vehicles.php (accessed on 15 October 2021).
- Unity3d Manual, NaveMesh Surface. March 2021. Available online: https://docs.unity3d.com/Manual/class-NavMeshSurface.html (accessed on 1 March 2021).
- Khan, Z.H.; Gulliver, T.A.; Nasir, H.; Shahzada, K. A macroscopic traffic model based on driver physiological response. J. Eng. Math. 2019, 115, 21–41. [Google Scholar] [CrossRef]
- Zhang, H.M. A theory of nonequilibrium traffic flow. Transp. Res. Part B Methodol. 1998, 32, 485–498. [Google Scholar] [CrossRef]
- Aw, A.; Rascle, M. Resurrection of ‘second order’ models of traffic flow. SIAM J. Appl. Math. 2000, 60, 916–938. [Google Scholar] [CrossRef]
- Ali, Z.; Khattak, K.S.; Agha, A.; Khan, Z.H.; Sethi, M.A.J.; Khan, A.N. On-board diagnostic (OBD-II) based cyber physical system for road bottlenecks detection. J. Eng. Sci. Technol. 2022, 17, 906–922. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Type | Dimensions (Length, Width, Height) | Maximum Velocity |
|---|---|---|---|
| 1 | Taxi | 4.5 m, 2.0 m, 1.8 m | 10 m/s |
| 2 | Sports car | 4.7 m, 1.9 m, 1.4 m | 10 m/s |
| 3 | Bus | 7.6 m, 2.3 m, 3.1 m | 9 m/s |
| 4 | Van | 4.9 m, 1.95 m, 1.8 m | 10 m/s |
| 6 | Ambulance | 5.3 m, 2.2 m, 2.4 m | 9 m/s |
| 7 | Police car | 4.6 m, 1.85 m, 1.7 m | 10 m/s |
| 8 | Small truck | 6.2 m, 2.46 m, 2.6 m | 8 m/s |
| Name | Parameter | Value |
|---|---|---|
| Safe time | ts | 4 s |
| Safe distance | ds | 1.2 m |
| Maximum normalized density | ρm | 1 |
| Maximum normalized velocity | vm | 10 m/s |
| Traffic density | ρ | Input |
| Traffic flow | vρ | Runtime |
| Equilibrium velocity distribution | v(ρ) | Runtime |
| Transition distance | dtr = ds + vmts | 41.2 m |
| Relaxation time | Τ | 5 s |
| Road section length | 360 m | |
| Number of road segments | 12 | |
| Segment length | 30 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeb, A.; Khattak, K.S.; Rehmat Ullah, M.; Khan, Z.H.; Gulliver, T.A. HetroTraffSim: A Macroscopic Heterogeneous Traffic Flow Simulator for Road Bottlenecks. Future Transp. 2023, 3, 368-383. https://doi.org/10.3390/futuretransp3010022
Zeb A, Khattak KS, Rehmat Ullah M, Khan ZH, Gulliver TA. HetroTraffSim: A Macroscopic Heterogeneous Traffic Flow Simulator for Road Bottlenecks. Future Transportation. 2023; 3(1):368-383. https://doi.org/10.3390/futuretransp3010022
Chicago/Turabian StyleZeb, Ali, Khurram S. Khattak, Muhammad Rehmat Ullah, Zawar H. Khan, and Thomas Aaron Gulliver. 2023. "HetroTraffSim: A Macroscopic Heterogeneous Traffic Flow Simulator for Road Bottlenecks" Future Transportation 3, no. 1: 368-383. https://doi.org/10.3390/futuretransp3010022
APA StyleZeb, A., Khattak, K. S., Rehmat Ullah, M., Khan, Z. H., & Gulliver, T. A. (2023). HetroTraffSim: A Macroscopic Heterogeneous Traffic Flow Simulator for Road Bottlenecks. Future Transportation, 3(1), 368-383. https://doi.org/10.3390/futuretransp3010022