Analyzing GNSS Measurements to Detect and Predict Bridge Movements Using the Kalman Filter (KF) and Neural Network (NN) Techniques




Abstract
:1. Introduction
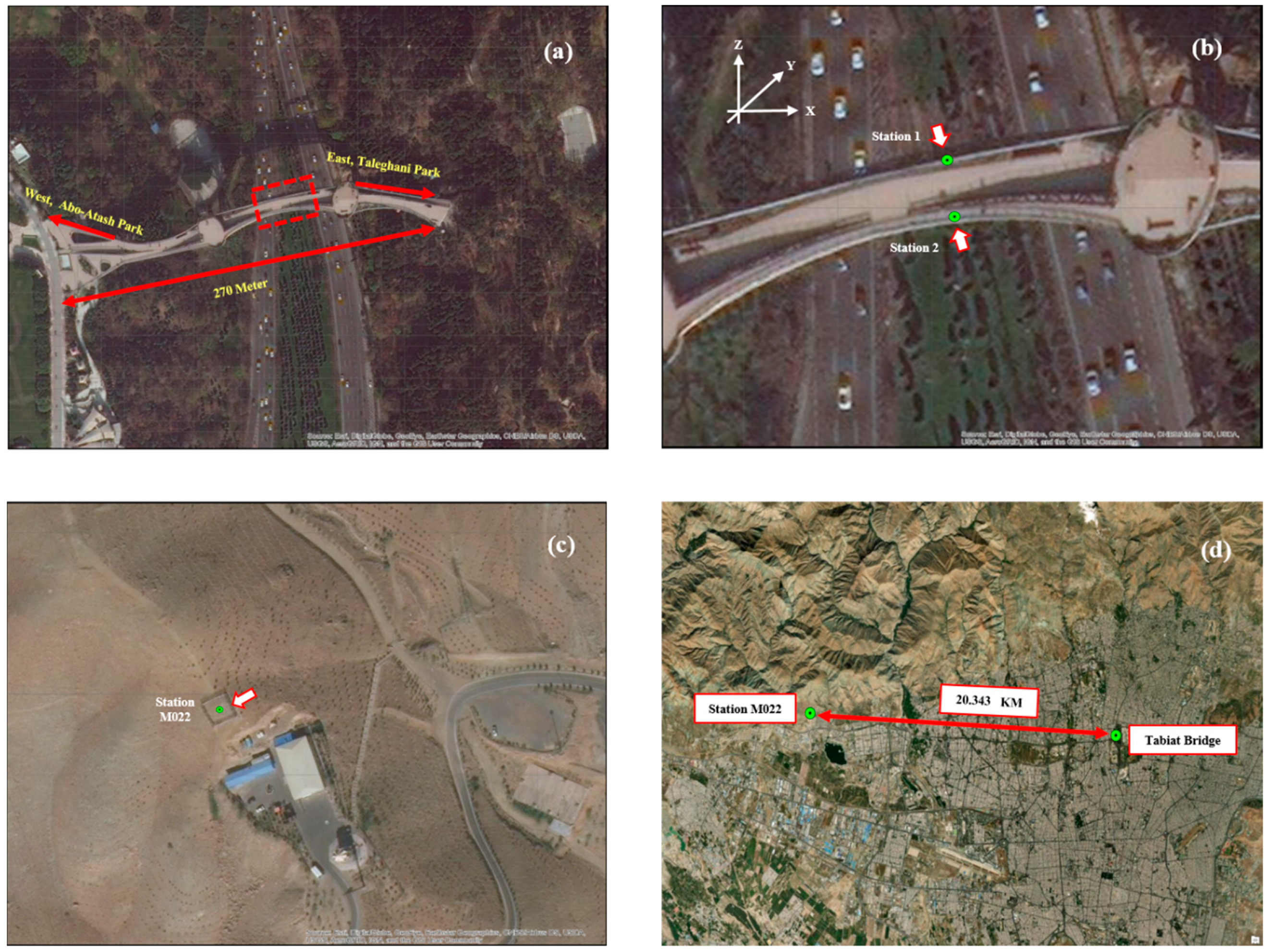
2. Tabiat Bridge and Structural Health Monitoring System Description
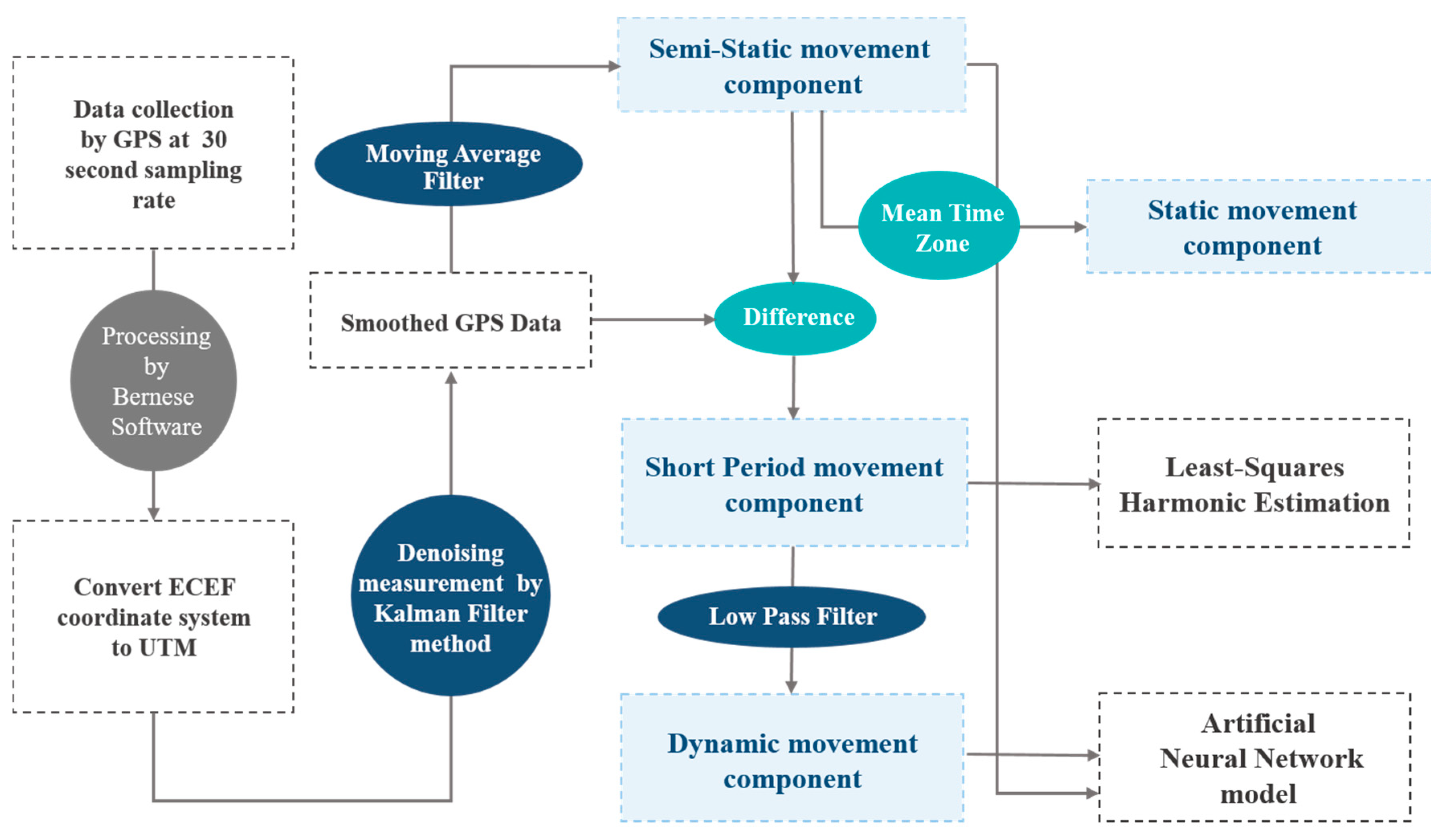
3. Methodology
3.1. Time-Series Denoising Using the Kalman Filter (KF) Approach
3.2. Extracting the Movement Components
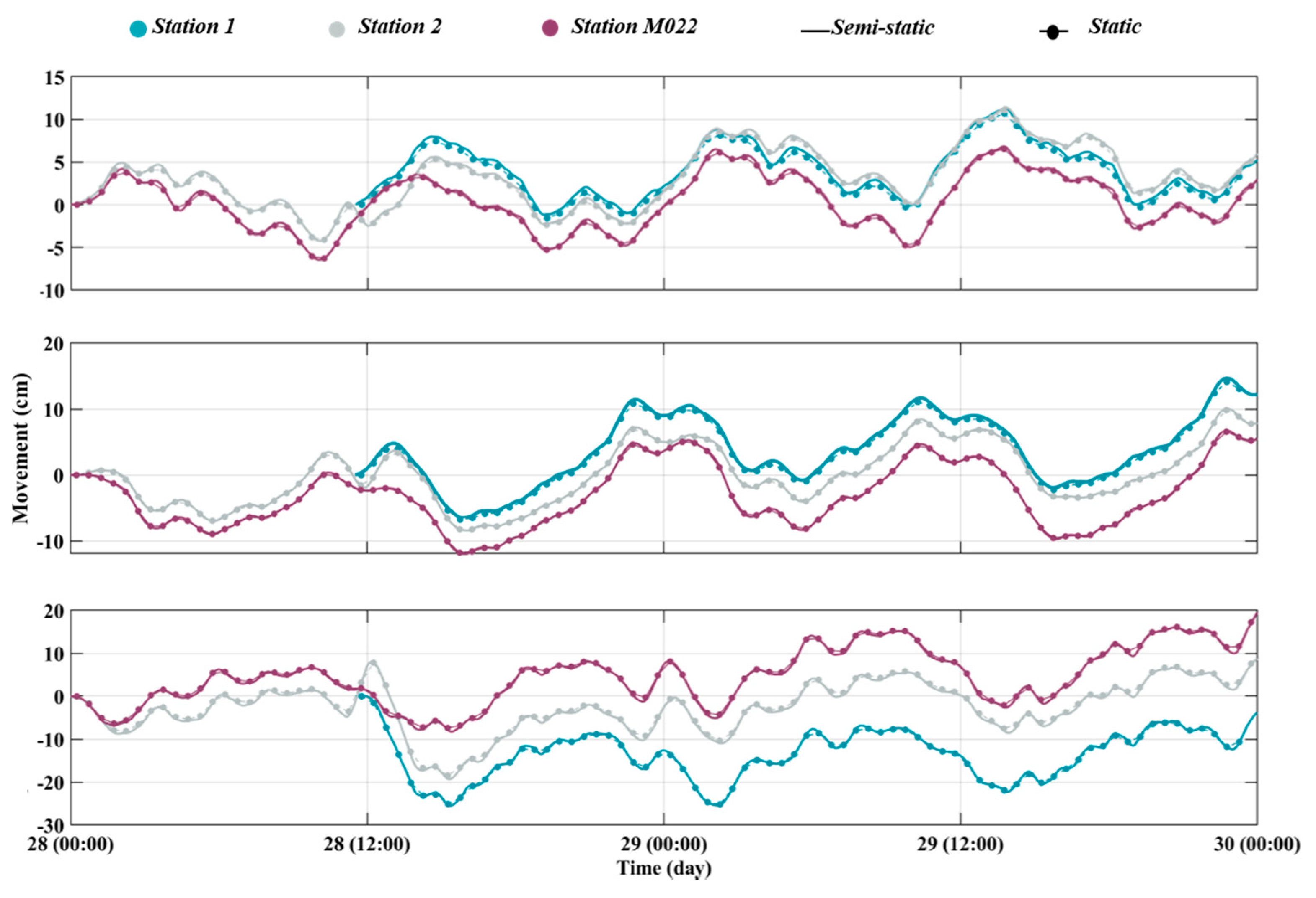
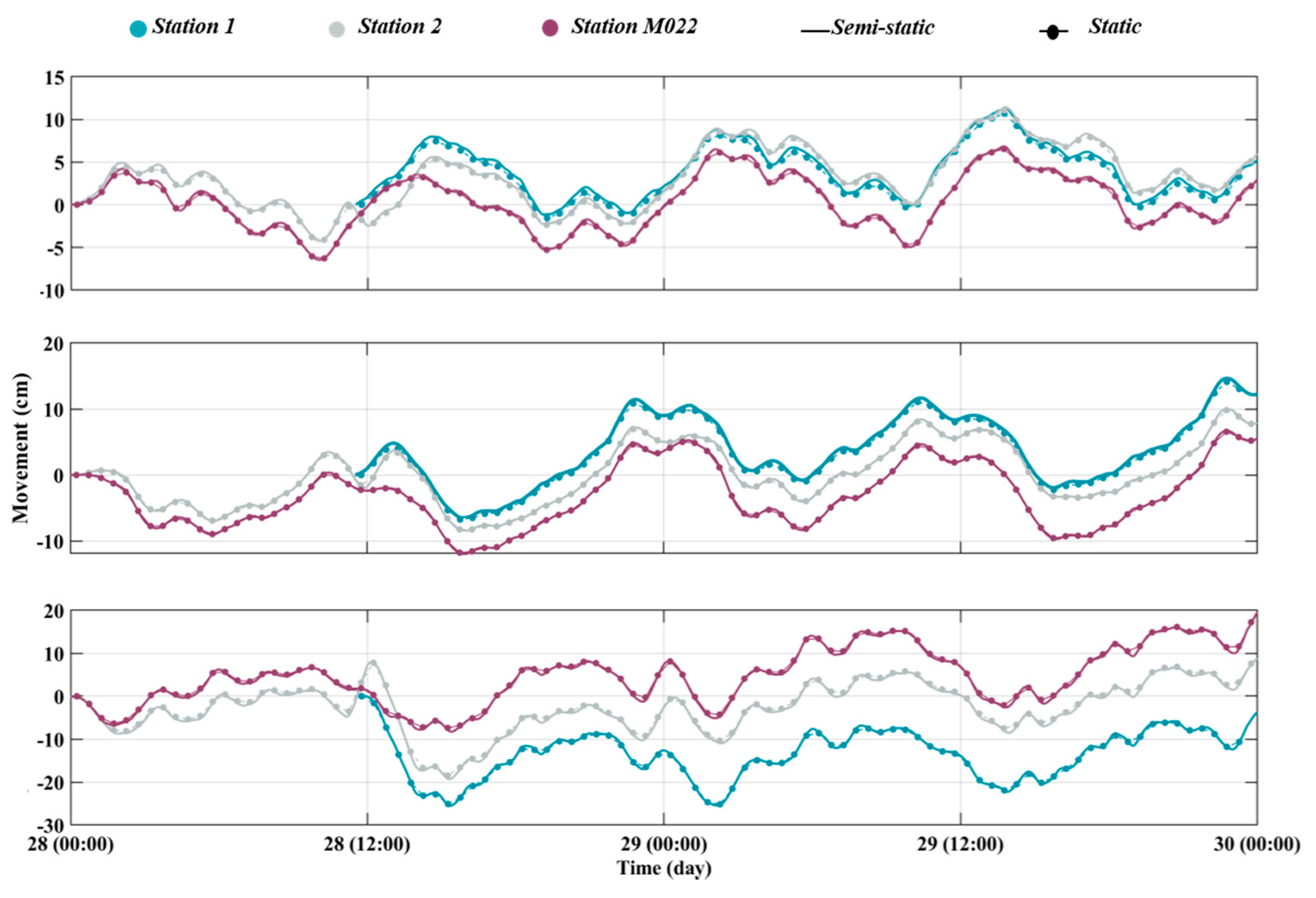
3.2.1. Semi-Static Component
3.2.2. Static and Short-Period Components
3.2.3. Dynamic Component
3.3. Neural Network (NN) for Prediction
3.4. Least Squares Harmonic Estimation (LS-HE) Method
4. Results and Discussions
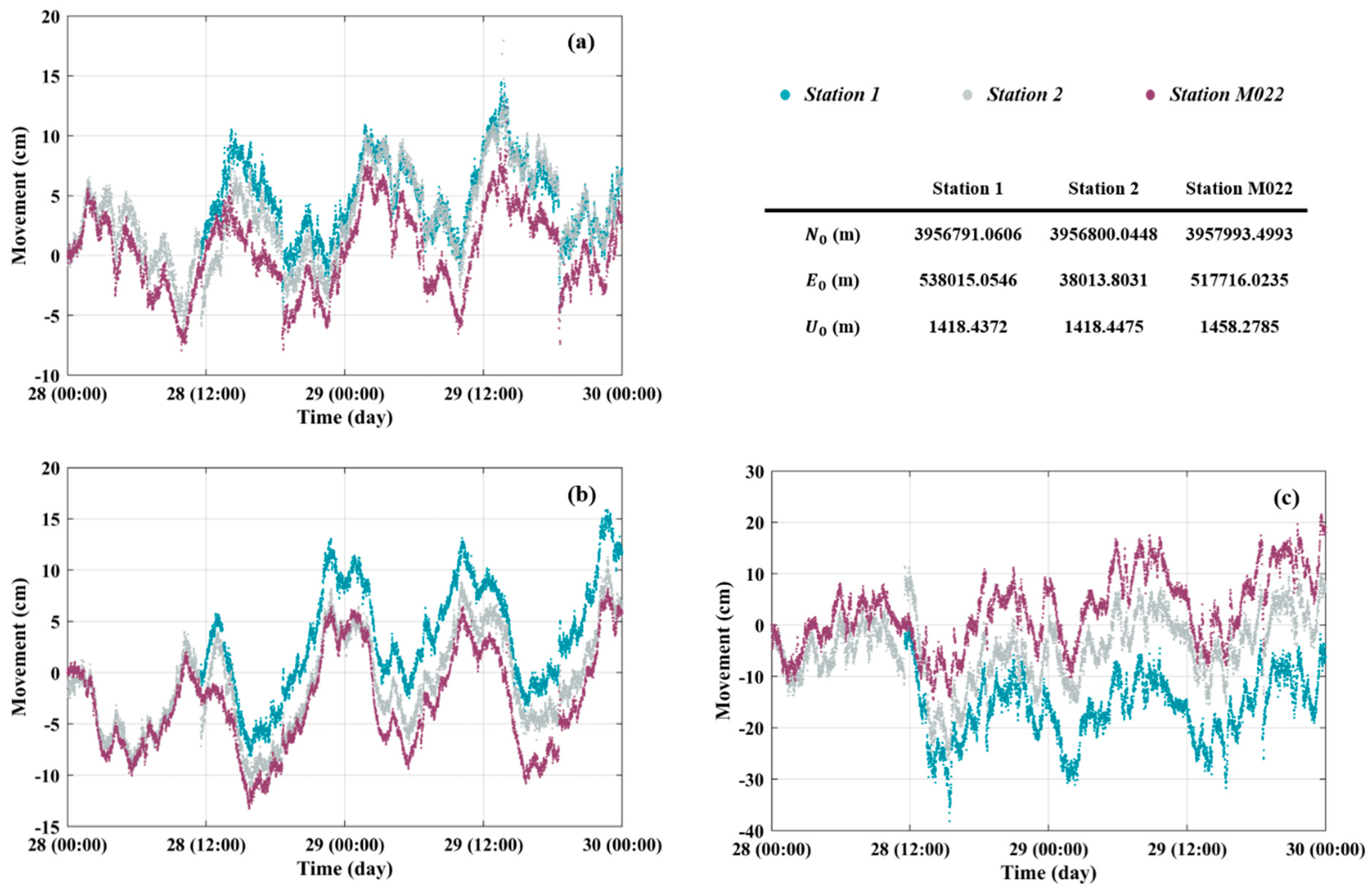
4.1. Data collection and Preparation
4.2. Data Pre-Processing
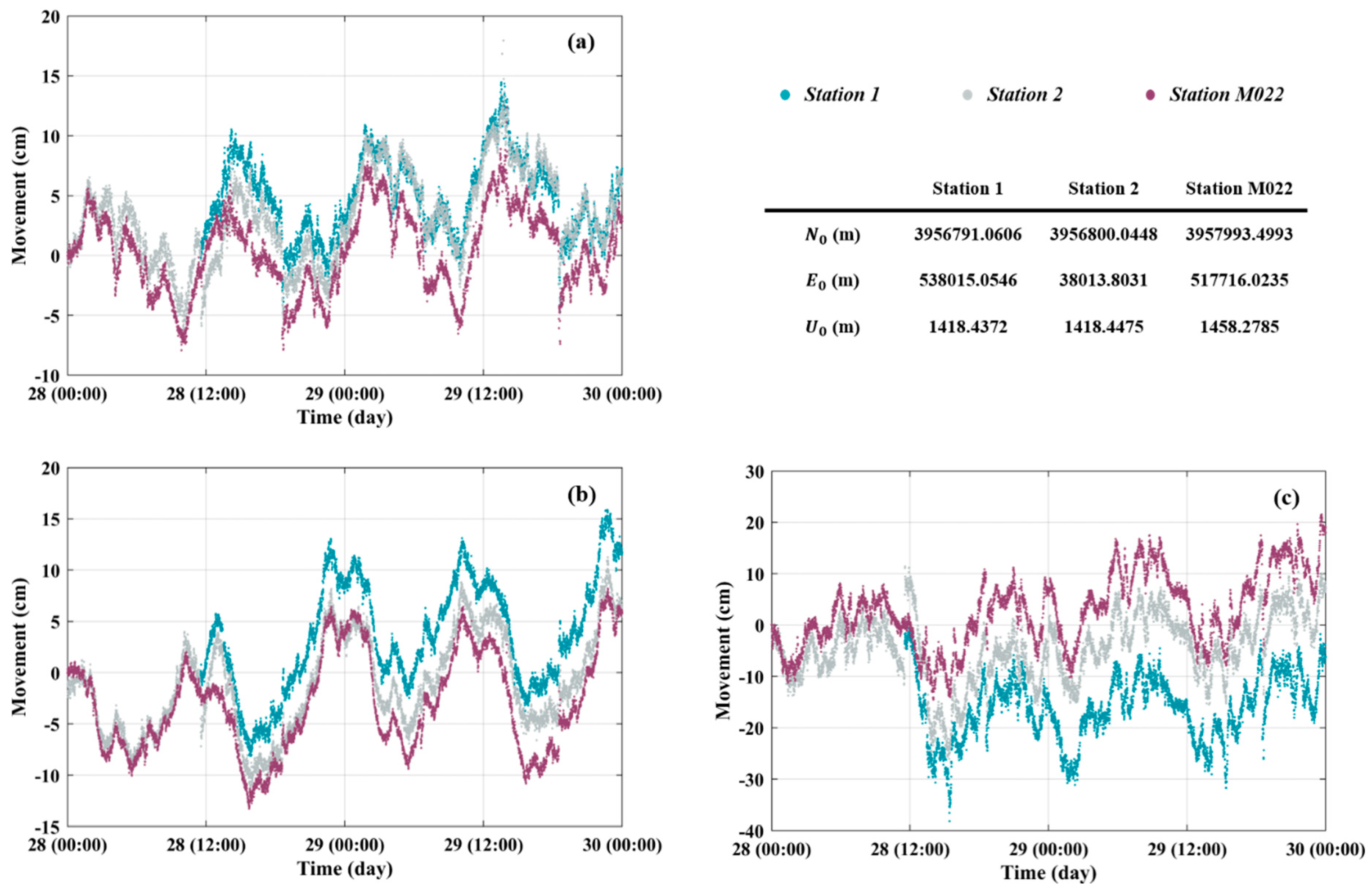
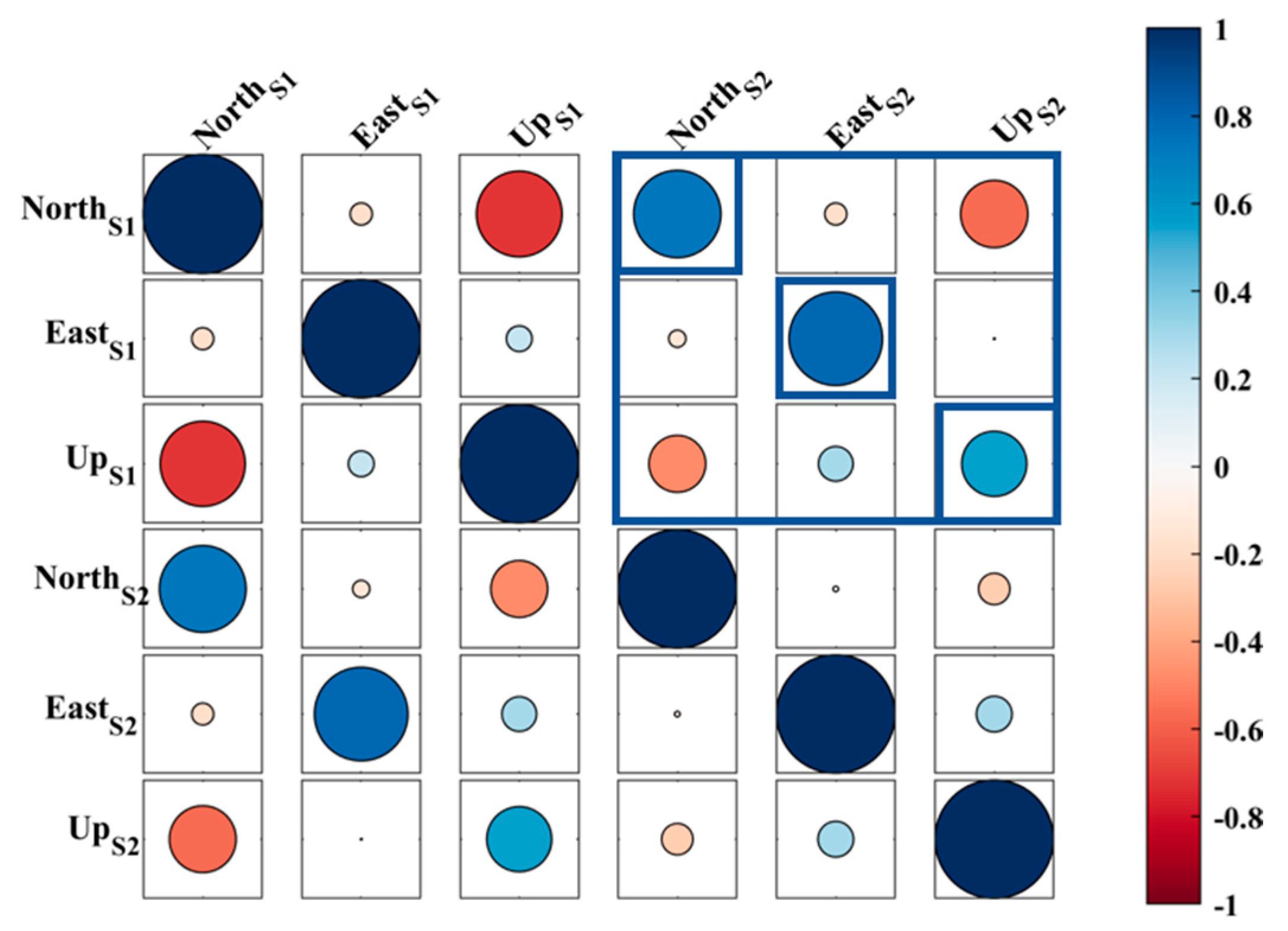
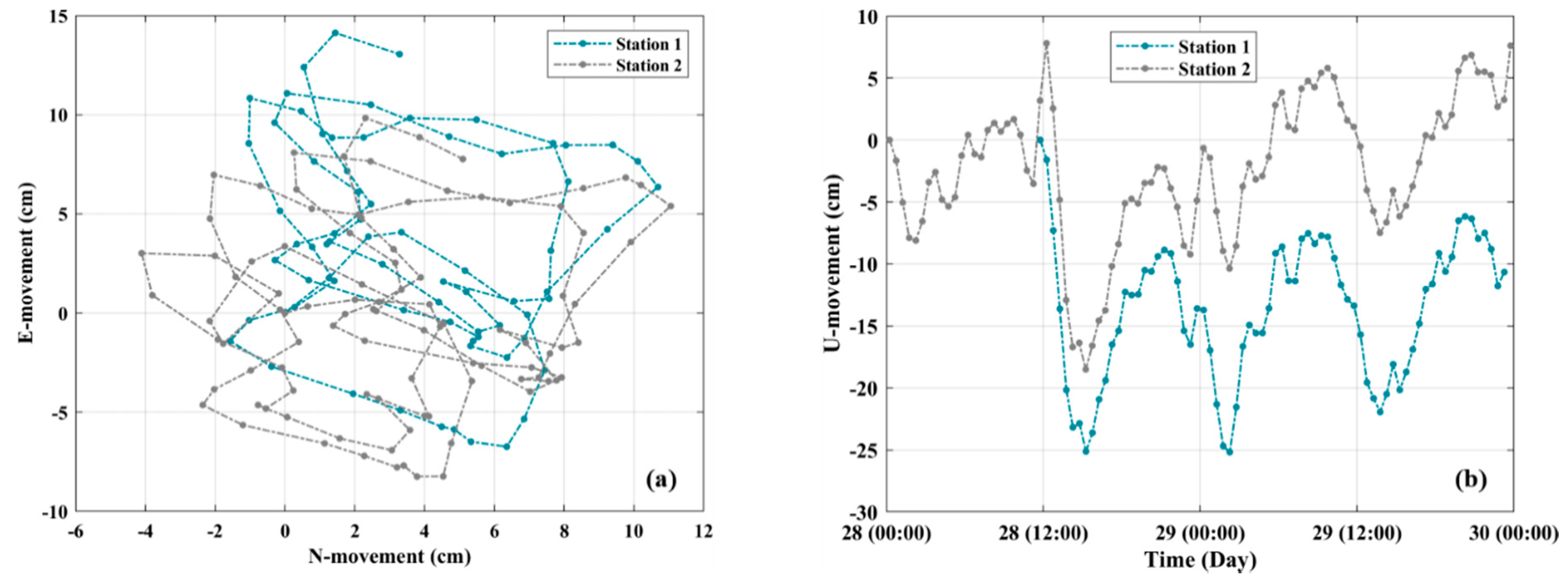
4.3. Bridge Movement Evaluation
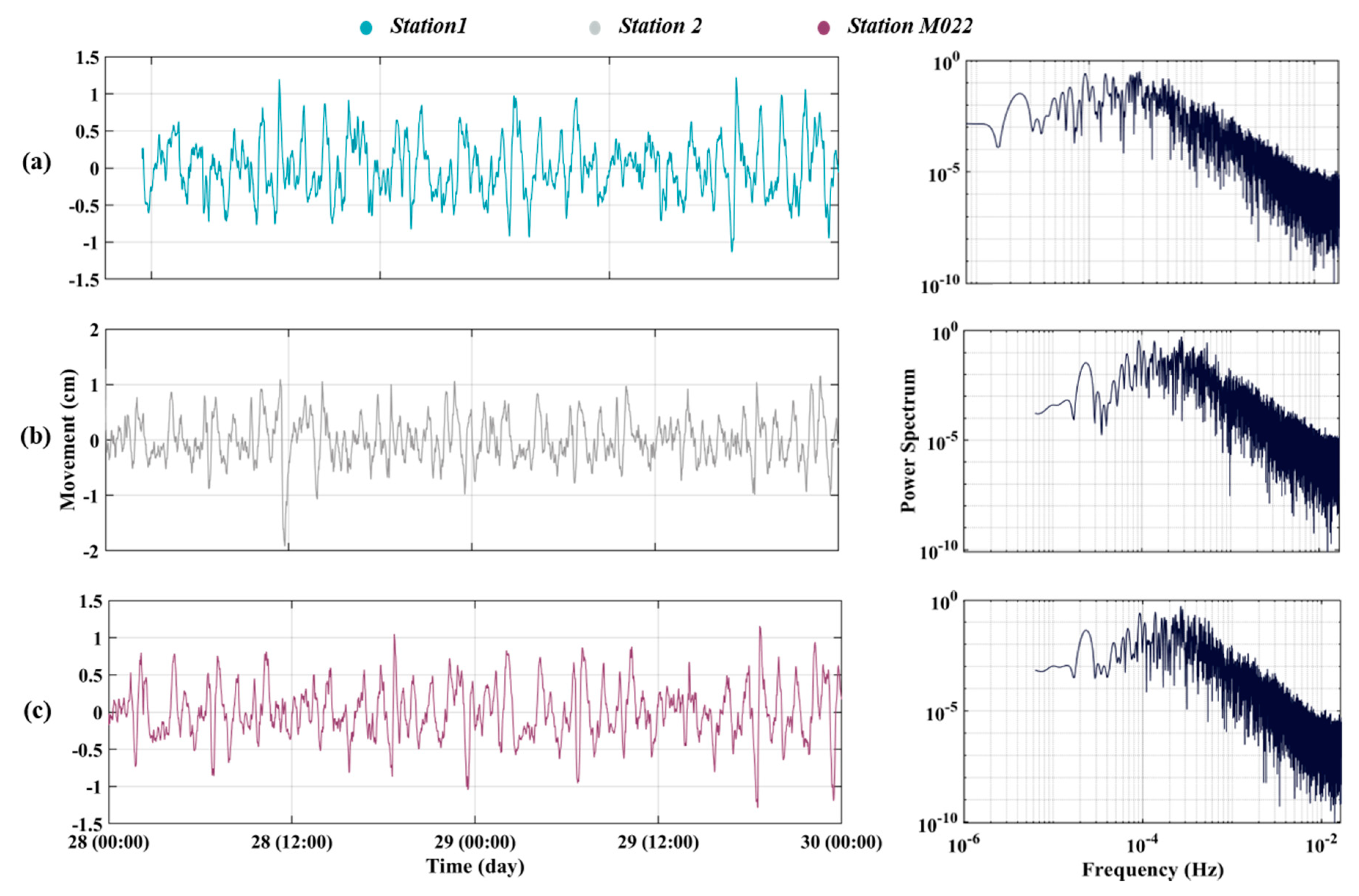
4.4. Frequency Domain Evaluation
4.5. Evaluation of the Bridge Movement Prediction Model
5. Conclusions
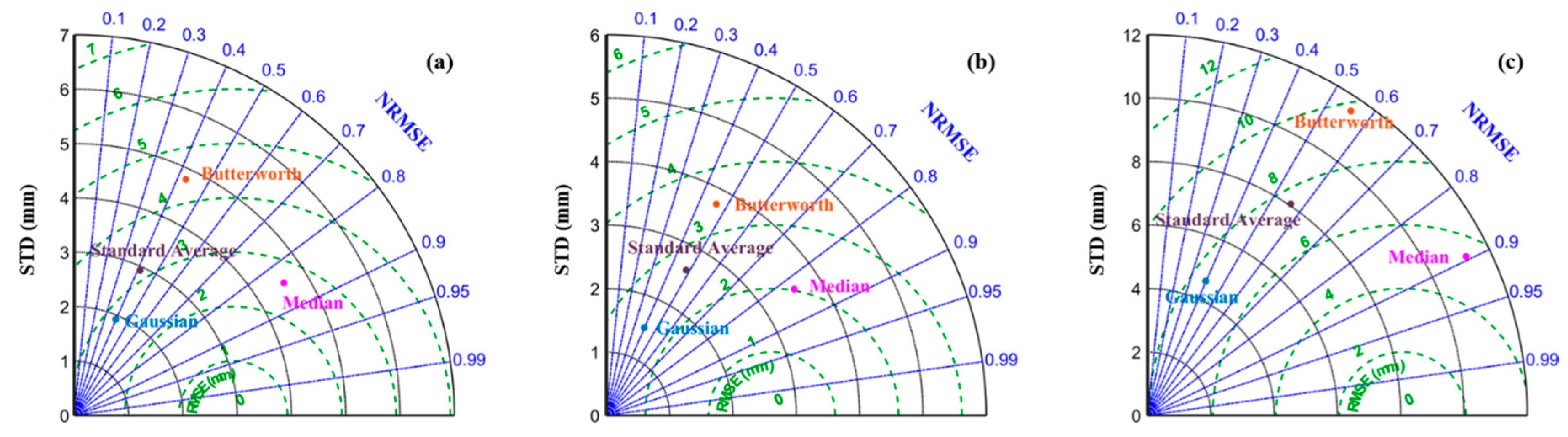
- The Kalman filter technique can be considered as a precise technique to de-noise the coordinates time-series. This method improves the uncertainty of data approximately from 0.024 to 0.0013 m.
- The least squares harmonic estimation method was found to be efficient for extracting dominant frequencies of the dynamic component of the bridge movement, especially the step-wise statistical test avoids extracting non-meaningful dominant frequencies. The numerical results obtained from this method indicate that the bridge performance is natural under the load effect during the monitoring time.
- Using the neural network method can be considered as an appropriate technique to forecast the dynamic and semi-static components of the bridge for 15 min. Here, the prediction model obtained an accuracy of about 6 × 10−5 and 4 × 10−5 m in the dynamic and semi-static components.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Im, S.B.; Hurlebaus, S.; Kang, Y.-J. Summary Review of GPS Technology for Structural Health Monitoring. J. Struct. Eng. 2013, 139, 1653–1664. [Google Scholar] [CrossRef]
- Aktan, A.E.; Catbas, F.N.; Grimmelsman, K.A.; Pervizpour, M.; Curtis, J.M.; Shen, K.; Qin, X. Health monitoring for effective management of infrastructure. In Smart Structures and Materials Vol. 4696. 2002: SPIE: Smart Systems for Bridges, Structures and Highways, Proceedings of the SPIE’s 9th Annual International Symposium on Smart Structures and Materials, San Diego, CA, USA, 9 July 2002; International Society for Optics and Photonics: Bellingham, WA, USA, 2002. [Google Scholar]
- Chen, G.; Lin, X.; Yue, Q.; Liu, H. Study on separation and forecast of long term deflection based on time series analysis. J. Tongji Univ. Nat. Sci. Ed. 2016, 44, 962–968. [Google Scholar]
- Zhou, J.; Li, X.; Xia, R.; Yang, J.; Zhang, H. Health Monitoring and Evaluation of Long-Span Bridges Based on Sensing and Data Analysis: A Survey. Sensors 2017, 17, 603. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stiros, S.C. Errors in velocities and displacements deduced from accelerographs: An approach based on the theory of error propagation. Soil Dyn. Earthq. Eng. 2008, 28, 415–420. [Google Scholar] [CrossRef]
- Wang, G.-Q. Some Observations on Colocated and Closely Spaced Strong Ground-Motion Records of the 1999 Chi-Chi, Taiwan, Earthquake. Bull. Seism. Soc. Am. 2003, 93, 674–693. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Li, J.; Lin, G. A simple approach to integration of acceleration data for dynamic soil–structure interaction analysis. Soil Dyn. Earthq. Eng. 2006, 26, 725–734. [Google Scholar] [CrossRef]
- Chan, W.S.; Xu, Y.-L.; Ding, X.L.; Dai, W.J. An integrated GPS–accelerometer data processing technique for structural deformation monitoring. J. Geod. 2006, 80, 705–719. [Google Scholar] [CrossRef]
- Gili, J.A.; Corominas, J.; Rius, J. Using Global Positioning System techniques in landslide monitoring. Eng. Geol. 2000, 55, 167–192. [Google Scholar] [CrossRef]
- Kaloop, M.R.; Hu, J.W. Dynamic Performance Analysis of the Towers of a Long-Span Bridge Based on GPS Monitoring Technique. J. Sens. 2016, 2016, 1–14. [Google Scholar] [CrossRef]
- Moschas, F.; Stiros, S. Measurement of the dynamic displacements and of the modal frequencies of a short-span pedestrian bridge using GPS and an accelerometer. Eng. Struct. 2011, 33, 10–17. [Google Scholar] [CrossRef]
- Yi, T.-H.; Li, H.-N.; Gu, M. Experimental assessment of high-rate GPS receivers for deformation monitoring of bridge. Measurement 2013, 46, 420–432. [Google Scholar] [CrossRef]
- Yu, J.; Yan, B.; Meng, X.; Shao, X.; Ye, H. Measurement of Bridge Dynamic Responses Using Network-Based Real-Time Kinematic GNSS Technique. J. Surv. Eng. 2016, 142, 04015013. [Google Scholar] [CrossRef]
- Moschas, F.; Stiros, S.C. Noise characteristics of high-frequency, short-duration GPS records from analysis of identical, collocated instruments. Measurement 2013, 46, 1488–1506. [Google Scholar] [CrossRef]
- Yu, J.; Meng, X.; Shao, X.; Yan, B.; Yang, L. Identification of dynamic displacements and modal frequencies of a medium-span suspension bridge using multimode GNSS processing. Eng. Struct. 2014, 81, 432–443. [Google Scholar] [CrossRef]
- Chen, Y.; Ye, Y.-Q.; Sun, B.-N.; Lou, W.-J.; Yu, J.-H. Application of model prediction technology to bridge health monitoring. J. Zhejiang Univ. Eng. Sci. 2008, 42, 157. [Google Scholar]
- Chen, Z.; Zhou, J.; Tse, K.T.; Hu, G.; Li, Y.; Wang, X. Alignment control for a long span urban rail-transit cable-stayed bridge considering dynamic train loads. Sci. China Ser. E Technol. Sci. 2016, 59, 1759–1770. [Google Scholar] [CrossRef]
- Kao, C.-Y.; Loh, C.-H. Monitoring of long-term static deformation data of Fei-Tsui arch dam using artificial neural network-based approaches. Struct. Control. Health Monit. 2011, 20, 282–303. [Google Scholar] [CrossRef]
- Ossandón, S.; Bahamonde, N. On the nonlinear estimation of GARCH models using an extended Kalman filter. In Proceedings of the World Congress on Engineering, London, UK, 6–8 July 2011. [Google Scholar]
- Hadis Samadi, A. New GPS Time Series Analysis and a Simplified Model to Compute an Accurate Seasonal Amplitude of Tropospheric Delay. Ph.D. Thesis, The University of Western Ontario, London, ON, Canada, 2017. [Google Scholar]
- Van Le, H.; Nishio, M. Time-series analysis of GPS monitoring data from a long-span bridge considering the global deformation due to air temperature changes. J. Civ. Struct. Health Monit. 2015, 5, 415–425. [Google Scholar] [CrossRef]
- Xin, J.; Zhang, H.; Yang, S.X.; Li, X.; Wang, Y. Bridge Structure Deformation Prediction Based on GNSS Data Using Kalman-ARIMA-GARCH Model. Sensors 2018, 18, 298. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cao, J.; Ding, W.-Y.; Zhao, D.-S.; Song, Z.-G.; Liu, H.-M. Time series forecast of foundation pit deformation based on LSSVM-ARMA model. Rock Soil Mech 2014, 35, 579–586. [Google Scholar]
- Qin, P.; Cheng, C. Prediction of Seawall Settlement Based on a Combined LS-ARIMA Model. Math. Probl. Eng. 2017, 2017, 1–7. [Google Scholar] [CrossRef]
- Huang, T.; Chen, X.; Liu, L. Deflection prediction of long span pre-stressed concrete beam bridgebased on ant colony optimization algorithm. J. Southeast Univ. Nat. Sci. Ed. 2013, 43, 235–240. [Google Scholar] [CrossRef]
- Kang, F.; Liu, J.; Li, J.; Li, S. Concrete dam deformation prediction model for health monitoring based on extreme learning machine. Struct. Control. Health Monit. 2017, 24, e1997. [Google Scholar] [CrossRef]
- Lai, J.; Qiu, J.; Feng, Z.; Chen, J.; Fan, H. Prediction of Soil Deformation in Tunnelling Using Artificial Neural Networks. Comput. Intell. Neurosci. 2015, 2016, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Lian, C.; Zeng, Z.; Yao, W.; Tang, H. Ensemble of extreme learning machine for landslide displacement prediction based on time series analysis. Neural Comput. Appl. 2014, 24, 99–107. [Google Scholar] [CrossRef]
- Yang, J.; Zhou, Y.; Zhou, J.; Chen, Y. Prediction of Bridge Monitoring Information Chaotic Using Time Series Theory by Multi-step BP and RBF Neural Networks. Intell. Autom. Soft Comput. 2013, 19, 305–314. [Google Scholar] [CrossRef]
- Zhou, J.; Yang, J. Prediction of Bridge Life Based On Svm Pattern Recognition. Intell. Autom. Soft Comput. 2011, 17, 1009–1016. [Google Scholar] [CrossRef]
- Górski, P. Investigation of dynamic characteristics of tall industrial chimney based on GPS measurements using Random Decrement Method. Eng. Struct. 2015, 83, 30–49. [Google Scholar] [CrossRef]
- Yi, T.-H.; Li, H.-N.; Gu, M. Recent research and applications of GPS-based monitoring technology for high-rise structures. Struct. Control. Health Monit. 2012, 20, 649–670. [Google Scholar] [CrossRef]
- Larocca, A.P.C.; Schaal, R.E.; Santos, M.C.; Langley, R.B. Analyzing the dynamic behavior of suspension bridge towers using GPS. In Proceedings of the 19th International Technical Meeting of the ION Satellite Division—ION GNSS, Fort Worth, TX, USA, 26–29 September 2006. [Google Scholar]
- Sayed, M.A.; Kaloop, M.R.; Kim, E.; Kim, D. Assessment of acceleration responses of a railway bridge using wavelet analysis. KSCE J. Civ. Eng. 2016, 21, 1844–1853. [Google Scholar] [CrossRef]
- Souza, E.M.; Negri, T.T. First prospects in a new approach for structure monitoring from GPS multipath effect and wavelet spectrum. Adv. Space Res. 2017, 59, 2536–2547. [Google Scholar] [CrossRef]
- Taha, M.M.R.; Noureldin, A.; Lucero, J.L.; Baca, T.J. Wavelet Transform for Structural Health Monitoring: A Compendium of Uses and Features. Struct. Health Monit. 2006, 5, 267–295. [Google Scholar] [CrossRef]
- Yu, M.; Guo, H.; Chengwu, Z. Application of Wavelet Analysis to GPS Deformation Monitoring. In Proceedings of the 2006 IEEE/ION Position, Location, And Navigation Symposium, San Diego, CA, USA, 25–27 September 2006; pp. 670–676. [Google Scholar]
- Amiri-Simkooei, A.R.; Tiberius, C.C.J.M.; Teunissen, P.J.G.; Amiri-Simkooei, A. Assessment of noise in GPS coordinate time series: Methodology and results. J. Geophys. Res. Space Phys. 2007, 112, 7. [Google Scholar] [CrossRef] [Green Version]
- Kaloop, M.R.; Hussan, M.; Kim, D. Time-series analysis of GPS measurements for long-span bridge movements using wavelet and model prediction techniques. Adv. Space Res. 2019, 63, 3505–3521. [Google Scholar] [CrossRef]
- Zhang, G. Time series forecasting using a hybrid ARIMA and neural network model. Neurocomputing 2003, 50, 159–175. [Google Scholar] [CrossRef]
- Gul, M.; Catbas, F.N. Statistical pattern recognition for Structural Health Monitoring using time series modeling: Theory and experimental verifications. Mech. Syst. Signal Process. 2009, 23, 2192–2204. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, Y.; Ye, Z. Short-Term Traffic Volume Forecasting Using Kalman Filter with Discrete Wavelet Decomposition. Comput. Civ. Infrastruct. Eng. 2007, 22, 326–334. [Google Scholar] [CrossRef]
- Lazarov, A.; Kabakchiev, C.; Dimitrov, A.; Minchev, D. Kalman tracking filter in 3-D space. In Proceedings of the 2017 18th International Radar Symposium (IRS), Prague, Czech Republic, 28–30 June 2017. [Google Scholar]
- Hyndman, R.J. Moving Averages; Springer: Berlin/Heidelberg, Germany, 2011; pp. 866–869. [Google Scholar]
- Harvey, A.C.; Trimbur, T.M. General Model-Based Filters for Extracting Cycles and Trends in Economic Time Series. Rev. Econ. Stat. 2003, 85, 244–255. [Google Scholar] [CrossRef]
- Shumway, R.H.; Stoffer, D.S. An approach to time series smoothing and forecasting using the em algorithm. J. Time Ser. Anal. 1982, 3, 253–264. [Google Scholar] [CrossRef]
- Barner, K.E.; Arce, G.R. 21 Order-statistic filtering and smoothing of time-series: Part II. Handb. Stat. 1998, 17, 555–602. [Google Scholar] [CrossRef]
- Harlim, J.; Hunt, B.R. A non-Gaussian ensemble filter for assimilating infrequent noisy observations. Tellus A Dyn. Meteorol. Oceanogr. 2007, 59, 225–237. [Google Scholar] [CrossRef] [Green Version]
- Fröhlich, H.; Chapelle, O.; Schölkopf, B. Feature selection for support vector machines using genetic algorithms. Int. J. Artif. Intell. Tools 2004, 13, 791–800. [Google Scholar] [CrossRef]
- Haykin, S. Neural Networks: A Comprehensive Foundation; Prentice Hall: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Davidson, R.J.; Lewis, D.A.; Alloy, L.B.; Amaral, D.G.; Bush, G.; Cohen, J.D.; Drevets, W.C.; Farah, M.J.; Kagan, J.; McClelland, J.L.; et al. Neural and behavioral substrates of mood and mood regulation. Biol. Psychiatry 2002, 52, 478–502. [Google Scholar] [CrossRef]
- Amiri-Simkooei, A.; Parvazi, K. Extracting tidal frequencies of the Persian Gulf and Oman Sea using multivariate least square harmonic estimation of sea level coastal height observations time series. J. Earth Space Phys. 2017, 43, 165–180. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GNSS System(s) | GPS Only |
|---|---|
| Basic observable | carrier phase with an elevation angle cutoff of 7° and a sampling rate of 30 s. |
| Modelled observable | Double differences of the ionosphere-free linear combination. |
| Ground antenna phase center calibrations | IGS08 absolute phase-center variation model is applied. |
| Tropospheric Model | A priori model is the GMF mapped with the DRY-GMF. |
| Tropospheric Mapping Function | GMF |
| Ionosphere | First-order effect eliminated by forming the ionosphere-free linear combination of L1 and L2. Second and third effect applied. |
| Center orbit time | final |
| Station coordinates | Coordinate constraints are applied at the Reference sites with standard deviation of 1 mm and 2 mm for horizontal and vertical components respectively. |
| Ambiguity | Ambiguities are resolved in a baseline-by-baseline mode using the Code-Based strategy for 180–6000 km baselines, the Phase-Based L5/L3 strategy for 18–200 km baselines, the Quasi-Ionosphere-Free (QIF) strategy for 18–2000 km baselines and the Direct L1/L2 strategy for 0–20 km baselines. |
| Terrestrial reference frame | IGS08 station around Iran (ankr, artu, drag, nico, polv, tehn, zeck) coordinates and velocities mapped to the mean epoch of observation. |
| Statistical Parameter | Station 1 | Station 2 | ||||
|---|---|---|---|---|---|---|
| N | E | U | N | E | U | |
| MAX | 0.1133 | 0.1465 | 0.2553 | 0.1145 | 0.1001 | 0.1934 |
| STD | 0.03 | 0.05 | 0.057 | 0.035 | 0.045 | 0.058 |
| Point | N | E | U |
|---|---|---|---|
| Station 1 | 0.00052 | 0.00028 | 0.00022 |
| Station 2 | 0.00035 | 0.00027 | 0.00022 |
| Station M022 | 0.00031 | 0.00026 | 0.00024 |
| Semi-Static | Dynamic | ||||||
|---|---|---|---|---|---|---|---|
| N | E | U | N | E | U | ||
| RMSE | Station 1 | 4.736 × 10−5 | 2.676 × 10−5 | 0.0012 | 7.940 × 10−5 | 3.490 × 10−5 | 7.807 × 10−5 |
| Station 2 | 9.772 × 10−5 | 4.371 × 10−5 | 0.0002 | 0.0001 | 6.616 × 10−5 | 0.0002 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Forootan, E.; Farzaneh, S.; Naderi, K.; Cederholm, J.P. Analyzing GNSS Measurements to Detect and Predict Bridge Movements Using the Kalman Filter (KF) and Neural Network (NN) Techniques. Geomatics 2021, 1, 65-80. https://doi.org/10.3390/geomatics1010006
Forootan E, Farzaneh S, Naderi K, Cederholm JP. Analyzing GNSS Measurements to Detect and Predict Bridge Movements Using the Kalman Filter (KF) and Neural Network (NN) Techniques. Geomatics. 2021; 1(1):65-80. https://doi.org/10.3390/geomatics1010006
Chicago/Turabian StyleForootan, Ehsan, Saeed Farzaneh, Kowsar Naderi, and Jens Peter Cederholm. 2021. "Analyzing GNSS Measurements to Detect and Predict Bridge Movements Using the Kalman Filter (KF) and Neural Network (NN) Techniques" Geomatics 1, no. 1: 65-80. https://doi.org/10.3390/geomatics1010006
APA StyleForootan, E., Farzaneh, S., Naderi, K., & Cederholm, J. P. (2021). Analyzing GNSS Measurements to Detect and Predict Bridge Movements Using the Kalman Filter (KF) and Neural Network (NN) Techniques. Geomatics, 1(1), 65-80. https://doi.org/10.3390/geomatics1010006