1. Introduction
Understanding of the thermodynamics of continuous media has made decisive progress in the twentieth century where the general scheme has been established in terms of balance laws and constitutive relations. The list of balance laws identifies the theory of physics under consideration, e.g., mechanics, electrodynamics, theory of mixtures. The constitutive relations characterize the nature of the continuum, e.g., solid, fluid, gas, hysteretic material. The view that the balance of entropy eventually results in requirements on the physically admissible constitutive relations is due to a well-known paper by Coleman and Noll [
1]. The associated postulate is the content of the corresponding second law of thermodynamics and it initiated far-reaching research on the exploitation of the second law for the constitutive relations. It is the purpose of this paper to show some new approaches to the exploitation of the second law. For this, we revisit the various formulations of the second law in
Section 3.
It is a common feature of the various statements of the second law that the admissible constitutive relations are subject to the requirement that the entropy production be non-negative. The exploitation of this requirement depends on the form of the constitutive relations (functions, functionals, rate equations). Furthermore, we need to know the proper mathematical expression of the second law and, in particular, to know the expression of the entropy production. Indeed, we regard the entropy production as a constitutive property per se, in addition to being related to other constitutive properties.
The purpose of this paper is to emphasize new aspects associated with the formulation and the exploitation of the second law in continuum physics. Following Müller [
2,
3], we let the entropy flux, say
, be a constitutive function and not merely the heat flux
divided by the absolute temperature
. Furthermore, we let the entropy production be a constitutive function.
Three main points have to emerge from this paper. First, the occurrence of a nonzero difference proves essential whenever we look for non-local terms involving higher-order gradients of temperature and deformation. Second, in three-dimensional settings, vectors and tensors are in order and they occur through inner products in the inequality representing the second law. A representation formula, quite uncommon in the literature, produces the general solution whenever the sought equations are expressed in rate-type forms. Third, the occurrence of the entropy production as a constitutive function is essential in the thermodynamically consistent modeling of hysteretic materials.
The entropy production allows the completion of rate-type hysteretic equations, as with Duhem-like models. This feature is exemplified in this paper for elastic–plastic materials, though the analogue can be performed for magnetic or electric hysteresis [
4]. As is shown in this paper, both the use of the representation formula and the entropy production as a constitutive function turn out to be decisive improvements in the elaboration of material modeling. The representation formula allows for more general non-local properties while the constitutive entropy production results in a direct method for the description of hysteretic materials.
2. Notation and Balance Equations
A body occupies a time-dependent region in the three-dimensional space. The position vector of a point in is denoted by . Hence, and are the mass density and the velocity fields at at time . The symbol ∇ denotes the gradient with respect to , while is the divergence operator. For any pair of vectors , or tensors , the notation and denotes the inner product. Cartesian coordinates are used, and then, in the suffix notation, , , the summation over repeated indices is understood. Also, sym and skw denote the symmetric and skew-symmetric parts of , while is the space of symmetric tensors. A superposed dot denotes the total time derivative, and hence, for any function on we have . The symbol denotes the velocity gradient, , while and . Further, is the Cauchy stress tensor, is the specific body force, and ⊗ denotes the dyadic product.
Let be the region occupied by the body in a reference configuration. Any point in is associated with the position vector relative to a chosen origin. The motion of the body is a function . The gradient, with respect to , of is the deformation gradient , .
The balance of mass is expressed by the continuity equation:
The equation of motion is written in the form
We assume that there is no internal structure, and then, let
.
Let
be the specific internal energy density. The balance of energy leads to
where
r is the heat supply per unit mass, and
is the flux vector.
3. Statements of the Second Law
Let be the absolute temperature and the specific entropy density. We denote as a thermodynamic process the set of fields describing the evolution of the body, namely, . We now revisit the statement of the second law in continuum physics and point out the various formulations that have appeared in the literature.
Let
be any sub-region that is convected by the motion. As with any balance equation we may express the balance of entropy by letting the rate consist of a volume integral and a surface integral,
and correspondingly viewing
s as the entropy supply and
as the entropy flux. The arbitrariness of the region
, the transport theorem, and the smoothness of the functions
imply that
Borrowing from classical thermodynamics (e.g., [
5]), Coleman and Noll [
1] considered
as the
external volume supply of entropy, and likewise, assumed that
. Hence, they considered the difference
as the internal specific (rate of) production of entropy. Accordingly, they stated the following postulate:
For every process admissible in a body the inequality
is valid.
This postulate, based on Definition (
4), amounts to assuming that Inequality (
5), and hence,
selects the admissible processes. Inequality (
5), or (
6), is called the
Clausius–Duhem (CD) inequality or entropy inequality, while the postulate is viewed as the second law of thermodynamics or entropy principle.
In light of (
6), it follows that
Replacing
from (
1) and multiplying by
we have
In terms of the Helmholtz free energy
, we find
In 1967, Müller [
2] postulated the entropy balance in the form
where the entropy flux
need not be equal to
, and furthermore,
has to be determined as any constitutive function.
Next, Green and Laws [
6] assumed a modified form of the entropy inequality by replacing the absolute temperature
in (
6) with a non-equilibrium temperature
, which requires a constitutive function and, in equilibrium, reduces to
.
In 1977, Green and Naghdi [
7] wrote the balance of entropy in the form of an equality,
which, in the previous scheme, amounts to viewing
as the entropy production. Yet, they introduced two novelties. Firstly, the entropy production
is given by a constitutive relation. Secondly,
need not be a non-negative while, as for the postulate about the second law, they assumed that
for all thermo-mechanical processes. Note that Equation (
10) is recovered from (
7) when
.
Some further comments and statements of the second law appeared later on. In 1990, Maugin [
8] (see also [
9]) wrote the second law in the form
where
and
is the entropy flux taken in Müller’s form
. Yet, the energy supply
r is missing and the subsequent procedure leads to the requirement
, which is quite unusual.
Lately, “non-conventional” statements have been given and corresponding approaches have been developed in Refs. [
10,
11] by distinguishing equilibrium and non-equilibrium quantities. The stress power
w and the heat flux
are considered in the forms
and
, where
are the values associated with the local equilibrium state. Hence, the entropy inequality is stated in the form
while the balance of energy is written in the form
. Again, the energy supply
r is missing.
A further approach is due to Dunn and Serrin [
12], who posited the existence of a rate of supply of mechanical energy,
u, through the boundary of each sub-region, and hence, via a corresponding divergence term
. So, they assumed the balance of energy and entropy in the form
as though
. If
, then
.
Second Law and Thermodynamic Processes
Back to the general balance of entropy (
3), we let
where
and
denote the
external and
internal volume supply of entropy. As any flux,
may be viewed as an
external entropy contribution to the pertinent sub-region
. Accordingly, we view
as a term of internal character, and then, we refer to
as the (rate of) specific entropy production. Therefore, consistent with Postulate (
5), we assume that
and regard both
and
as expressed by constitutive relations. Hence, a process is the set
expressed by constitutive relations, while
and
r are arbitrary given time-dependent fields on
. If further fields are involved, such as, e.g., electromagnetic fields, the set
is completed accordingly. The Coleman–Noll postulate is then generalized as follows.
Second law of thermodynamics. For every process
admissible in a body, the inequality (
11) is valid at any internal point.
As to boundary points and the required boundary condition, we recall the following.
Principle of the increase in entropy. The entropy of an isolated system cannot decrease in time.
Now, let
the vector field
is referred to as the extra-entropy flux [
3]. Hence, the balance of entropy reads
By the principle of the increase in entropy, when
on
and
on
, we have
or
The flow through the boundary
of the extra-entropy flux
is bounded by the entropy production in the body.
We append two comments on the properties of
. Firstly, keeping the inequality (
6) as valid also when
or letting (
13) hold if
is replaced with any sub-region
leads to
Next, we show the consequences of (
15) and compare them with those of (
11). Secondly, sometimes the boundary condition is taken in the form
This condition, which is consistent with (
14) and Postulate (
5), may be suggested by the mathematical modeling [
6,
13].
Since
then Equation (
11) can be written in the form
Upon replacing
from (
1), using the Helmholtz free energy,
and multiplying by
we obtain
As we show in the next section, the role of the extra-entropy flux
is crucial in the modeling of materials with higher-order gradients [
14].
For later use we now derive the Lagrangian version of (
16). Let
and notice that
is the mass density in the reference configuration
. Next, let
the referential stress
and vectors
;
is referred to as the second Piola (or Piola–Kirchhoff) stress. The Green–Lagrange strain tensor
is related to the stretching
by
Hence, it follows that
Furthermore, we have
Hence,
J times Equation (
16) yields
4. The Extra-Entropy Flux and Materials with Higher-Order Gradients
Non-locality properties in the modeling of materials are often described by a dependence on higher-order gradients. The corresponding thermodynamic consistency is crucially related to the occurrence of a nonzero extra-entropy flux and to the way the flux is applied.
For definiteness, here we examine materials where the non-locality is modeled by second-order gradients of temperature and mass density, and then, we let
be the set of variables. The stress
is assumed to be in the form
We then apply the second law of thermodynamics to determine the class of thermodynamically consistent models based on the set of variables.
Compute the time derivative
and replace it in (
16) to obtain
where
Two identities are convenient in the analysis of the inequality. They are
and similar with
in place of
. Note that
,
,
,
, and
can take arbitrary (tensor or scalar) values at the point
and time
t under consideration. The linearity (and arbitrariness) of these quantities imply
Now, observe that
and the like for
. Hence, the remaining inequality can be written in the form
where
and
denote generalized variational derivatives,
The linearity and arbitrariness of
in (
20) imply that
Condition (
22) holds if
depends on
and
through
.
To within inessential divergence-free terms we can take the extra-entropy flux
in the form
Inequality (
20) allows for a dependence of
on
and
p on
, e.g., by letting
with
[
4,
15]. Yet, for simplicity we neglect these dependencies for
and
p, and then, it follows that
Consequently, Equation (
20) reduces to
where
Hence, the entropy production
is amenable to the dissipative stress
and the heat flux
. The classical Navier–Stokes–Fourier model for
and
is just the simplest non-trivial model to account for the entropy production.
To summarize, a free energy
and the constitutive functions
,
satisfying (
23)–(
25) make a non-local model thermodynamically consistent. Though the model might be more general (e.g.,
dependent on
), the previous scheme allows for higher-order gradients. Indeed, we can say that the scheme is characterized by the free energy
and the entropy production
.
4.1. Some Features of the Free Negentropy
It is of interest to examine some consequences of the dependence of constitutive properties on the gradients
and
. The occurrence of
in the variational derivatives (
21) suggests that we determine
and
p in terms of the function
which is the opposite of the
Massieu potential [
16,
17]; borrowing from the terminology in [
18] we can say that
is the
Helmholtz free negentropy. We find that
where
stand for the classical variational derivatives
4.1.1. Convexity Relative to the Mass Density
Subject to the approximation of a constant temperature, the propagation of linear acoustic waves is governed by the equation
where
denotes the Laplacian. If
then, neglecting the nonlinear terms in
, we have
The governing equation becomes
Harmonic plane waves
occur with
only if
. This insight, along with the thermodynamic interest in the dependence of
p on
and
, suggests that we look for the effect of non-locality (via
). Now, by (
26) we have
For definiteness suppose that
has the form
Thus,
, and then,
so that
A further simplification arises if
is independent of
, which is the case if
. This happens if
with
being a constant. With this function
f, it follows that
and then,
In light of (
29), it follows that
Hence, if the negentropy has the form (
29), then the convexity of
, relative to the mass density
, implies the positive value of
. This in turn occurs if the free energy
has the form
where
is convex relative to
.
Incidentally, in view of (
27), the function
, at
, yields
Hence, in the event (
29), the requirement of the positiveness of
coincides with that of
.
The convexity of
, relative to
, is connected with the convexity of the free energy
. Indeed,
Also, let
the specific volume and define
. Hence,
Thus,
and the convexity of
amounts to the convexity of
.
4.1.2. Convexity Relative to the Temperature
It is worth checking the influence of the temperature gradient
on the specific heat
. Since
then in terms of
we can write
It follows that
For definiteness let
Hence, we have
Consider the particular case
, where
with
being a constant, and
Consequently, Equation (
31) yields
We then notice that the definition
and Function (
32) result in
The specific heat
is positive for any values of
, and
provided
and
is convex, relative to
.
4.2. Restrictions Placed by Inequality (15)
As a comment on inequality (
15), which is
not assumed to be valid, we point out that the consequences of (
15) on the modeling of non-local materials would be different from those of
.
For formal simplicity we restrict attention to non-local effects of temperature, and hence, let
be the set of variables. Inequality (
15) implies that
which means that
, and
have to be non-negative in addition to being equal to each other. Now,
results in
The linearity and arbitrariness of
imply that
Likewise, from
namely,
it follows that
along with the reduced inequality
Different to what follows from the CD inequality (
16), here
is required to be independent of
, and so is for
and
p. Furthermore,
does not involve the dyadic product
(and this would be the same for
) as happens in the previous scheme.
This example shows that the assumption (
15) on the entropy inequality would be unduly restrictive relative to the correct assumption (
11). Having
and
in distinct inequalities is more restrictive than a single condition on
.
5. Entropy Production as a Constitutive Function
Back to the CD inequality (
16), we now show how the entropy production
affects, or is affected by, the constitutive equations. This is exemplified by considering the temperature-rate dependence or by models of aging materials.
5.1. Models of Rigid Heat Conductors
For simplicity consider a rigid heat conductor with
as the set of variables. The CD inequality becomes
Since
then we have
Hence, it follows that
No further dependence of
is allowed, otherwise
would include terms with an undetermined sign. A sufficient pair of relations for the validity of the remaining requirement
is
This is what follows if is only assumed to be non-negative; once is satisfied, then is given by times the left-hand side.
Things are different if
is defined per se; in this event, a family of relations follow depending on the form of
. For definiteness, if
, then we have the relations
5.2. Models of Aging Thermoelastic Materials
Aging properties are described by letting the constitutive parameters depend explicitly on time. This feature is now developed in connection with thermoelastic solids.
Classically (linear) thermoelastic solids are modeled by letting the second Piola stress
be determined by strain and temperature in the form (see [
19], ch. 59)
where
is an equilibrium reference temperature such that
when
and
. Furthermore, the heat flux is assumed to be given by a Fourier-type law,
The tensors , and are the classical thermoelastic tensors. Aging thermoelastic solids are characterized by letting , and depend on time.
This suggests that we consider a thermoelastic framework where the variables are
with the occurrence of
t accounting for the aging effects. Hence,
and similar for
. The Clausius–Duhem inequality is considered in form (
17), with the formal change due to the partial dependence on
t. Upon computation and substitution of
we have
without any loss of generality, for formal simplicity we have assumed
from the start. The linearity and arbitrariness of
imply that
and
We now restrict attention to the constitutive Equations (
34) and (
35). By (
37) we have
Hence, we have
Likewise, we let
depend on time, and then, the reduced inequality (
38) reads
The requirement (
39) can be applied by following two views. Firstly, we let
be a reminder that the left-hand side has to be non-negative and the left-hand side is just the expression of
. Secondly, the left-hand side is defined in terms of
, of course subject to
. To illustrate the two views we simplify the model by letting the solid be isotropic so that
where
is the deviator of
,
, and
and
are the Lamé moduli. Hence,
In stress-free conditions, we have
Since
and
is the relative variation in the volume, then
is the coefficient of thermal expansion (in
). We assume that
, so that, since
, the body expands when the temperature increases. For isotropic solids the free energy has the form
and hence,
By (
40) we have
. Consequently, it follows that
Hence, the reduced inequality
implies
In the second view, we might fix the constitutive equation for
. For example, let
where
and
are positive parameters, while
. Hence, Equation (
41) implies that
Accordingly, given the constitutive function of the entropy production the entropy inequality results in the aging rate of the thermoelastic parameters. A larger set of variables might allow a more realistic evolution equation for the parameters , and m.
In these models, we can view as determined by the constitutive equations, but also, the constitutive equations as determined by . The next section shows that for hysteretic rate-type materials the complete form of the constitutive equation is given by the assumption on the constitutive property of the entropy production.
Some comments are in order about the inequalities (
42). The requirement
merely shows that
K can increase or decrease because of aging but anyway
K remains non-negative. Instead, aging produces a decrease in
. The bulk modulus
is positive, and then, we can write
In a thermoelastic material, aging results in a decrease in
. A joint decrease in
, and
m is consistent with thermodynamics. Yet, since
, then an increase in
m looks more realistic,
. In this event, the consistency is expressed by
The coefficient of thermal expansion
satisfies
and hence,
Accordingly, aging results in an increase in the ratio
so that the solid expands more and more per increment of temperature.
6. Hysteretic Models and Entropy Production
To show the essential role of the entropy production we now consider constitutive relations for elastic–plastic bodies. We let the strain
, the Piola stress
, and the derivatives
be among the independent variables. The common dependence on stress and strain is connected with the hysteretic behavior; otherwise we should allow
to depend on
through a multi-valued function or to add an internal variable (as in [
19], ch. 76). Thermal properties are also modeled, and then, we let
be the set of variables. Hence, we let
be functions of
and assume
and
are continuous while
is continuously differentiable.
Upon computation of
and substitution into (
17) we obtain
The linearity and arbitrariness of
imply that
is independent of
, and hence,
Likewise, we find that
subject to
. No skew tensor is available in the model, and hence,
. Furthermore, the isotropic character of the solid implies that
has to be zero. The remaining inequality is
If
and
are independent, then it follows that
as happens for hyperelastic materials. Yet, here we consider hysteretic materials, and hence,
and
are not independent. A reasonable assumption is to assume
is independent of
and
. In this event, Equation (
43) splits into
where
is the value of
when
, while
is the value of
when
and
. If, instead,
depends on
and
, then (
44) holds along with (
25), whereas (
45) no longer holds.
As to (
45), a Fourier-like equation for
is allowed in the form
Since
and
, then in the corresponding Eulerian description, we have
Equation (
44) can be solved by finding, e.g.,
, on the assumption that
. This problem is solved by using a representation formula for tensors ([
4], §A.1.3). Given any tensor
and
, we can represent a tensor
in the form
where
. If
is known, say
, while
is unknown, then we can write
where
is the unit fourth-order tensor and
is any second-order tensor. As a check,
while
.
Let
By applying (
46) to (
44) we obtain
Depending on the choice of
we can find various models of rate-type materials. The simplest example is obtained by letting
In this event, Equation (
47) takes the form
This is the referential version of the Maxwell–Wiechert fluid. Indeed, the quantity
plays the role of relaxation time.
6.1. One-Dimensional Models
Also, with a view to experimental settings, we observe that it is worth investigating the continuum in a one-dimensional geometry. This has the advantage of simplifying the model because we can apply the Eulerian description.
Let
be the longitudinal direction of the one-dimensional domain and let
be the only nonzero stress component. Positive values of
denote traction, negative values denote compression. The mechanical power
simplifies to
where
F is the longitudinal strain,
. Consistent with the one-dimensional model, we assume
, and hence,
is constant while
. For formal simplicity we neglect heat conduction. Hence, we write the counterpart of (
44) in the form
Since
then, letting
we can write the CD inequality (
48) in the form
The scalars
and
are Euclidean invariants. Consider the Euclidean transformation ([
19], ch. 20, 21; [
4], §1.9)
where
is a rotation tensor,
. Since
, then, under a Euclidean transformation, we have
Likewise, letting
be the first referential unit vector we have
Consequently,
, and
are Euclidean invariants and can be used as constitutive variables.
Let
be the set of variables. It is standard to prove that
has to be independent of
and
, and that
Hence, it follows from (
49) that
Since
, then at constant temperature
. Hence, along any cyclic process on
we have
The positiveness of this integral denotes that the area within the oriented loop is positive. Thus, in a cyclic process in the plane, the curve is run in the clockwise sense.
In a hysteretic process, the rate
is associated with a
that depends on the sign of
. This would not be the case if
or even if
and
. Hence, necessarily the entropy production
has to be a constitutive function qualitatively different from the left-hand side, say a constitutive function per se. The simplest attempt is to look for a function
proportional to
. Hence, we let
Thus, Equation (
50) takes the form
and becomes an operative model of hysteresis once
and
are determined.
Analogous models are obtained by letting
; here, though, we restrict our attention to inequality (
51).
6.2. A Thermoelastic Hysteretic Model
For formal convenience we let
. Assume
. Except for times where
, we can divide (
51) by
to obtain
Both
and
are functions of
X, in the referential domain, and
. At a fixed point
X in the referential domain
,
and
are functions of
t only. Hence,
For formal convenience we put
Both
and
are functions of
and
, parameterized by the temperature
. The uniaxial stress–strain slope is then expressed in the form
If
, then
and
the slope of the curve depends also on
and we assume that
. Since the slope
is anyway supposed to be non-negative, we assume
To determine the free energy
we look for a function in the form
where
are differentiable functions parameterized by
. Substitution of
and
yields
and
in the forms
The function
is the elastic differential stiffness. Hence, we let
Accordingly, we obtain the requirement
This condition is satisfied by letting
and
where
is a suitable parameter for the model. Hence, we have
Furthermore,
To sum up, the whole model is determined by
and
For definiteness we now establish some examples of hysteretic solids. The corresponding loops are obtained by letting
, and then, solving the system
Since the model is rate-independent, the loops are not affected by the value of the angular frequency .
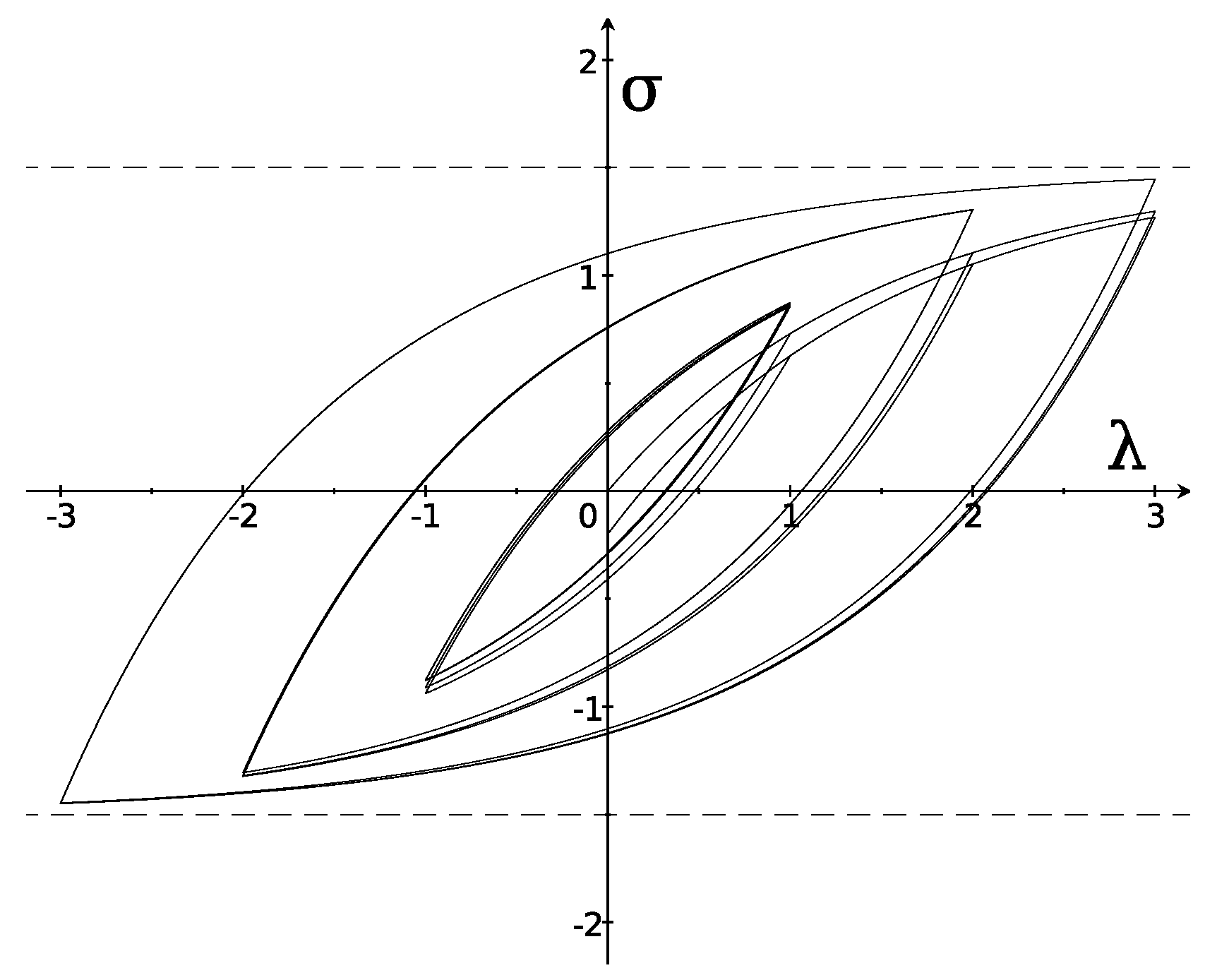
We start with a model based on a constant elastic differential stiffness
. Let
so that
and
. The hysteretic function
is taken in the form
Hence, the whole differential stiffness is
In this event it follows that
where
Thus,
and the hysteresis loops are confined to the strip
.
The hysteresis loops in
Figure 1 are obtained by solving the system (
54) and using (
55) with
and
.
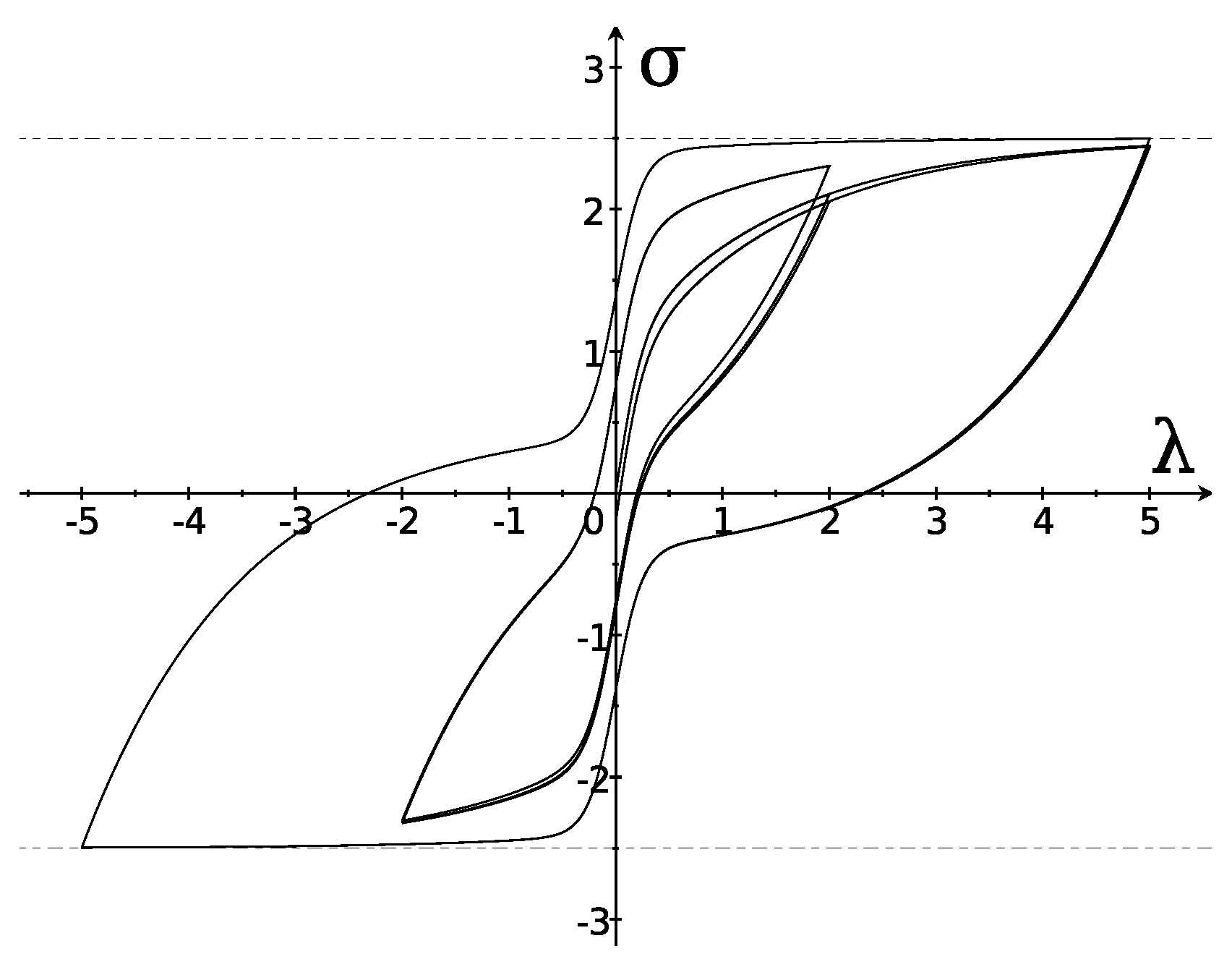
Hence, by (
53) and (
52) it follows that
The differential stiffness
can be given the form
The hysteresis loops in
Figure 2 are obtained by solving the system (
54) and using (
56) with
,
, and
. They well describe the hysteretic responses of lateral loads with respect to lateral displacements in a typical medium-rise building model (see, e.g., [
20]).
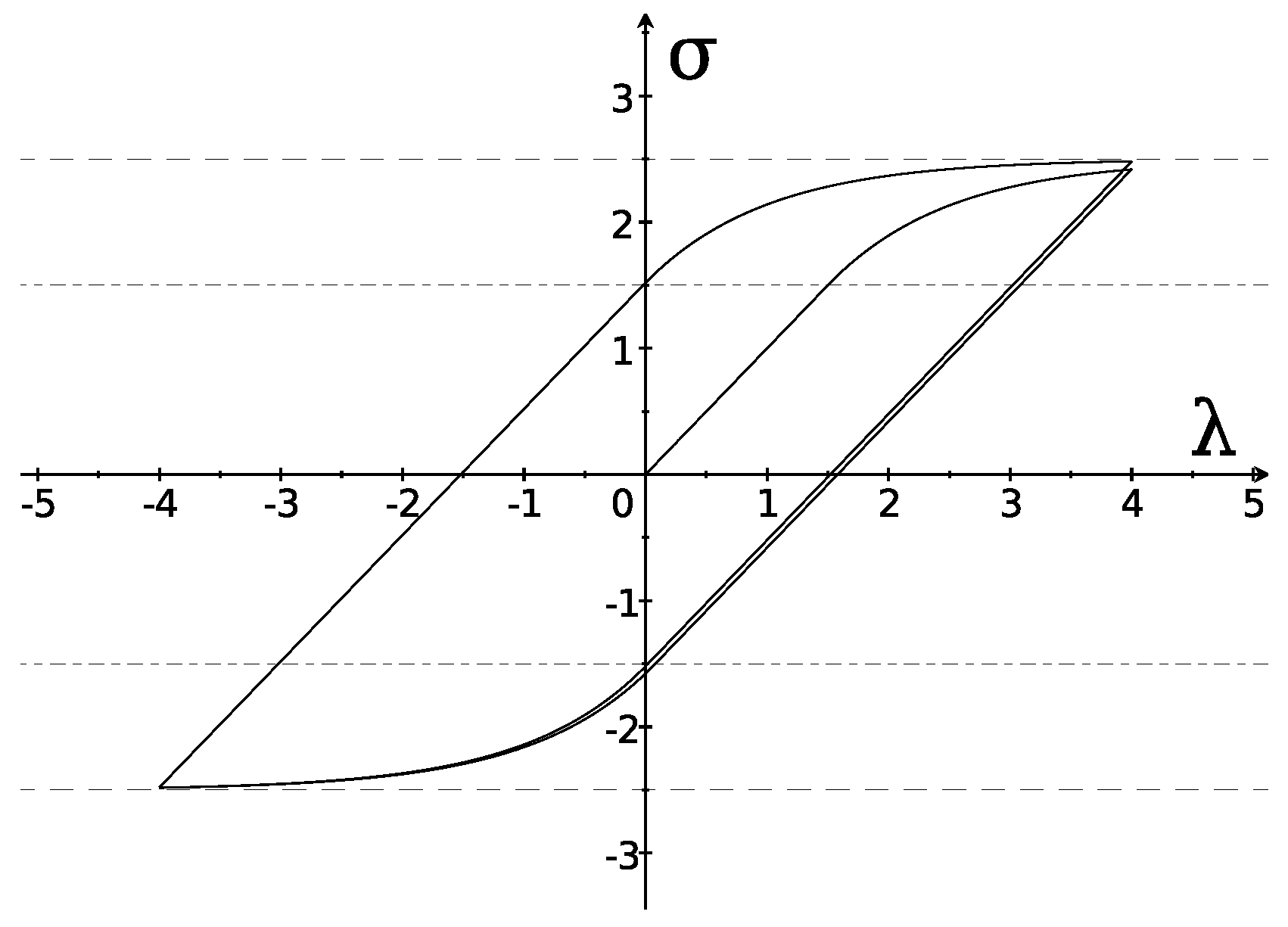
We now describe a solid undergoing linear behavior in the elastic regime. Hence, we let
and obtain
To characterize
we consider two stress levels,
, and assume hysteretic effects are confined to the region
in the form
The differential stiffness takes the form
Figure 3 shows the hysteresis loop obtained by solving the system (
54) and using (
57) with the parameters
,
, and
. Within the region
, the material behaves elastically during unloading and plastically during loading.
As exemplified by the previous models of plastic materials, the hysteretic properties are represented in simple and direct ways by an appropriate form of the entropy production as a constitutive function. Analogous properties hold in the modeling of ferroics. In addition to the conceptual character of as a constitutive function, these examples prove the experimental evidence of the reported method on the exploitation of the entropy inequality.
7. Conclusions
This paper deals with the mathematical formulation and the use of the second law of thermodynamics in continuum physics. Conceptually the second law states that the rate of entropy in any sub-region of the continuum is greater than the external entropy supply. This amounts to the assumption that the (rate of) entropy production is non-negative. Mathematically, this leads to a procedure for the selection of physically admissible constitutive properties [
21]. In the Coleman–Noll formulation, the entropy flux, say
, is
, while
is a constitutive function in the Müller formulation. It is an important point of the present formulation that the entropy production
is also a constitutive function (
Section 3).
The constitutive property of
is shown to have remarkable consequences on the whole thermodynamic scheme. Though quite uncommon in the literature,
Section 5 shows that the aging properties of non-dissipative materials, that is, terms related to energy functions, result in positive entropy productions. Next, as is shown in
Section 6, the occurrence of
as a constitutive function is essential in the modeling of thermodynamically consistent hysteretic materials. In particular, this is shown for elastic–plastic materials, though the analogue can be performed for magnetic or electric hysteresis [
22,
23,
24].
It is a further result, shown in
Section 6, that a representation formula allows a complete description of the consequences of the second law inequality. This greater generality is apparent when the constitutive equations involve vectors or tensors in rate-type equations.
From the standpoint of the mathematical modeling, the role played by the entropy production as a constitutive function is decisive, at least in the case of hysteretic materials. This is so because hysteresis exhibits a different behavior depending on the sign of a time derivative (namely, in loading and unloading). If, e.g., the variables are
, then the term
in the entropy inequality leads to
. Hence, the dependence on
happens through
. The dependence on the sign of
is then allowed by letting
depend on
through
By this approach, the thermodynamic requirement results in a hysteretic Duhem-like model [
25].
The procedure of
Section 6, based on the constitutive function of entropy production, is likely to apply to hysteresis processes [
26,
27]. To our mind, a rate equation similar to (
50) might well describe the time evolution of entropy–temperature loops.




{kind=link}
{kind=link}
{kind=link}