
Dronar—Geoforensic Search Sonar from a Drone


Abstract
:1. Background: Why Might Remote Bathymetry Be Needed?
2. Equipment and Methods
- (1)
- a Deeper Smart Sonar Pro+ and Deeper CHIRP+ 2 were utilized. The capabilities of both devices are presented in Table 1. Each device contains a WiFi module which connects to a smart device to record real-time data;
- (2)
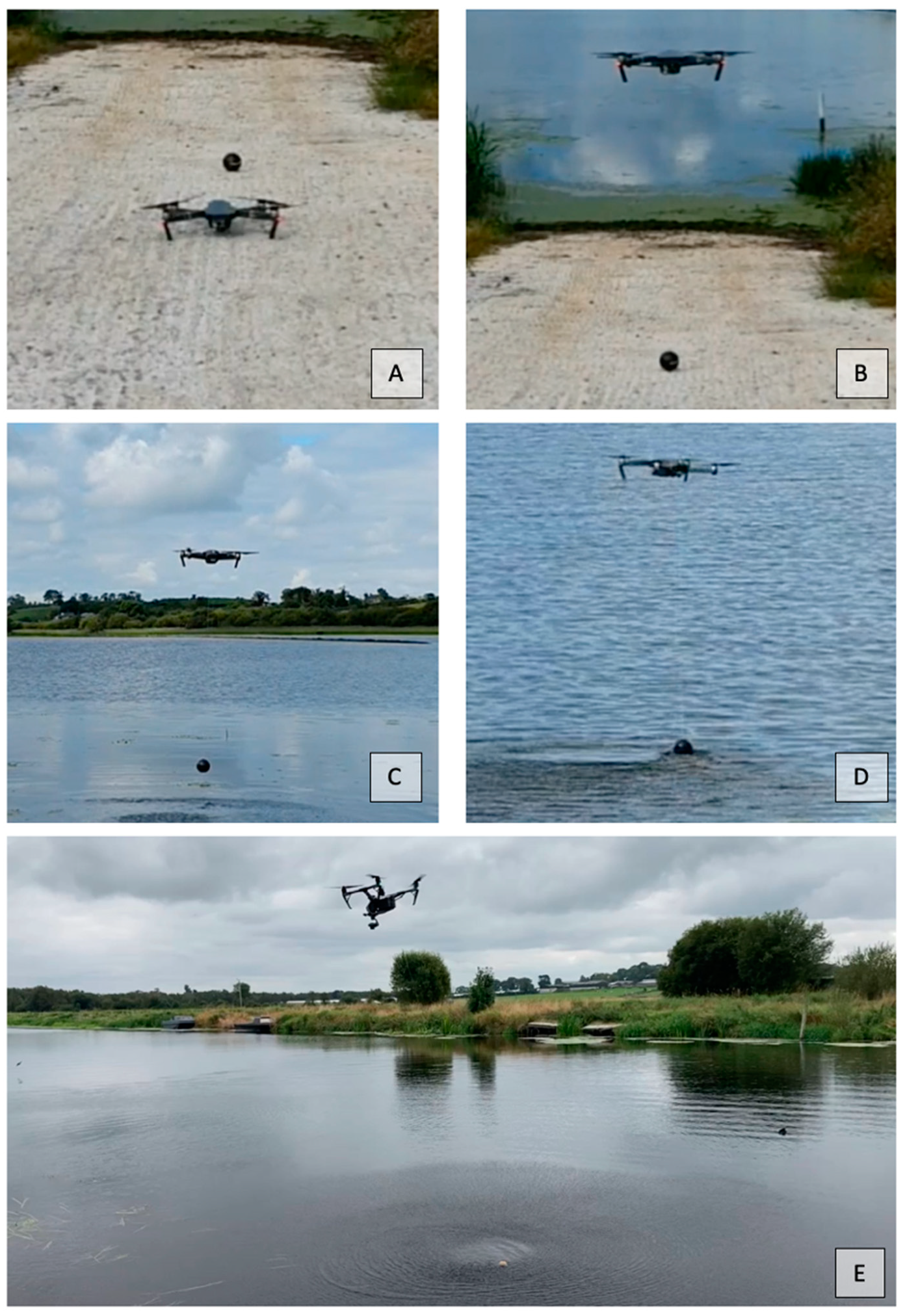
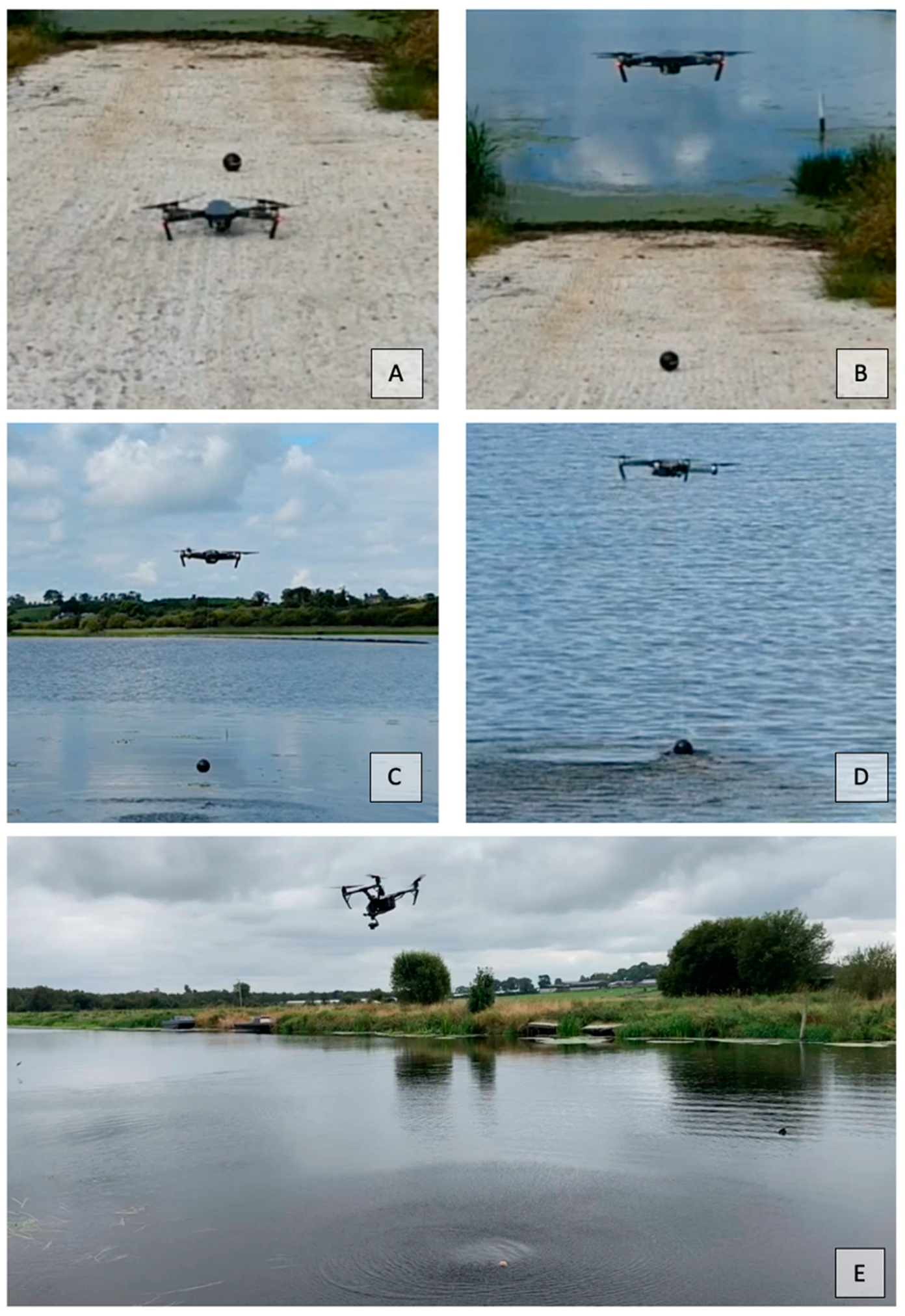
- the sonar devices were suspended on a static line (no winch) from three different drones: a DJI Mavic Pro, a DJI Phantom and a DJI Inspire 2;
- (3)
- the Fish Deeper app, containing in built bathymetric mapping software, was utilized for on-site water depth evaluation;
- (4)
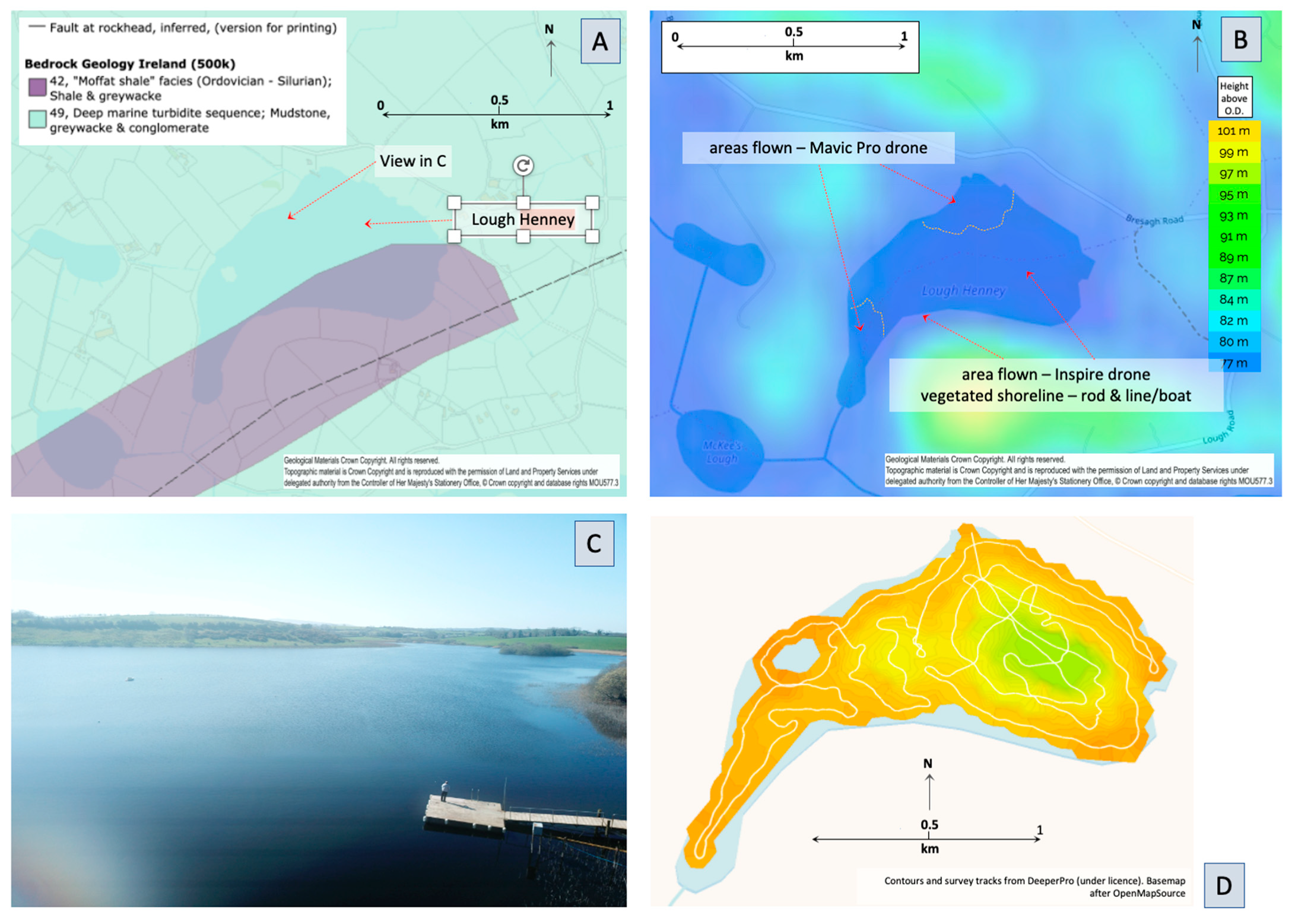
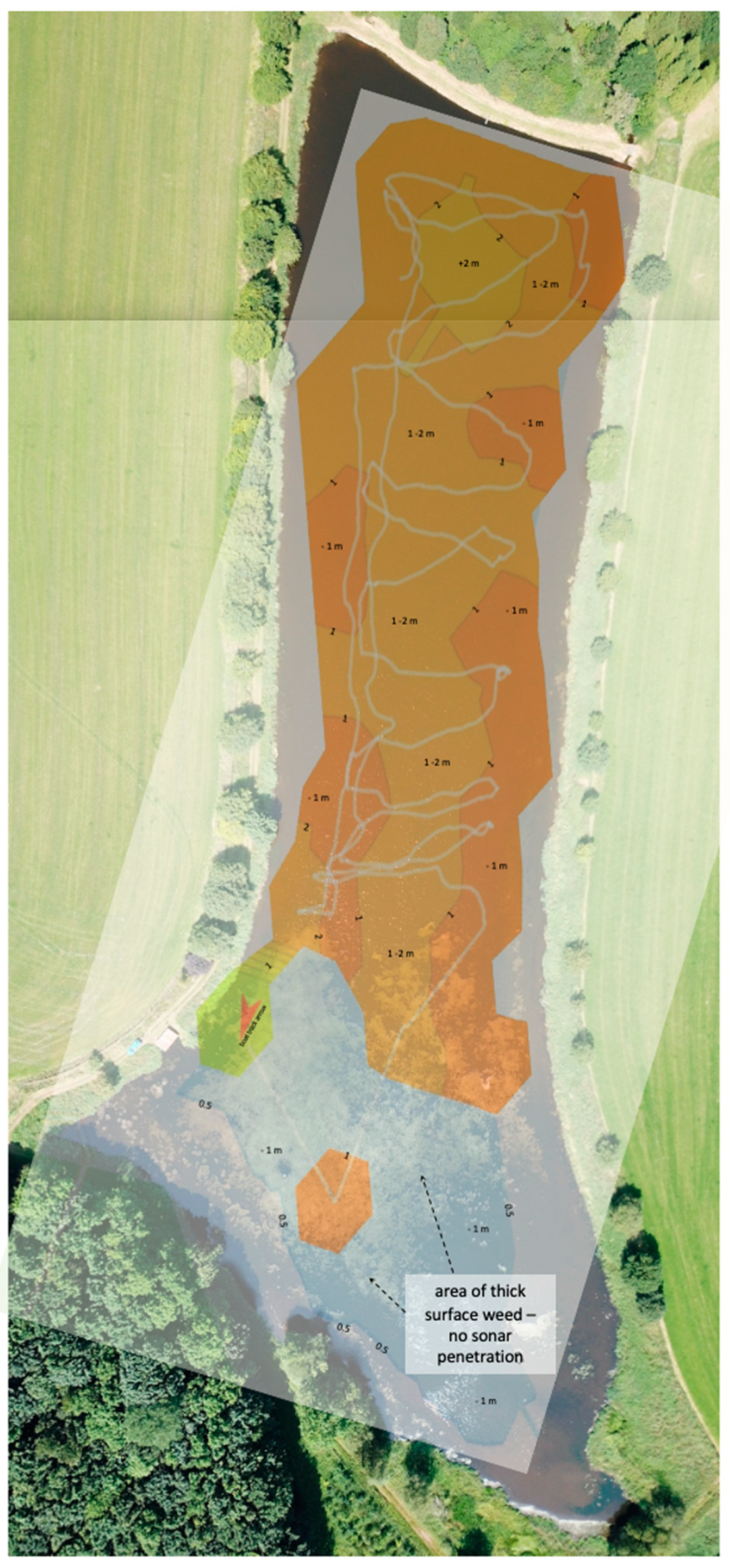
- we are demonstrating a quickly deployed and low cost data acquisition technique that is thorough enough to evaluate the feasibility of an underwater forensic search, if not complete it. Raw data, containing GPS points with corresponding water depth measurements were imported into an ArcGIS Pro to create detailed bathymetric maps which aid in the desktop study portion of the geoforensic search strategy (GSS) of Donnelly & Harrison [1]. The raw data were downloaded as .csv files from the Deeper Data Manager site ‘LakeBook’ found at https://maps.fishdeeper.com (last accessed 20 November 2021).
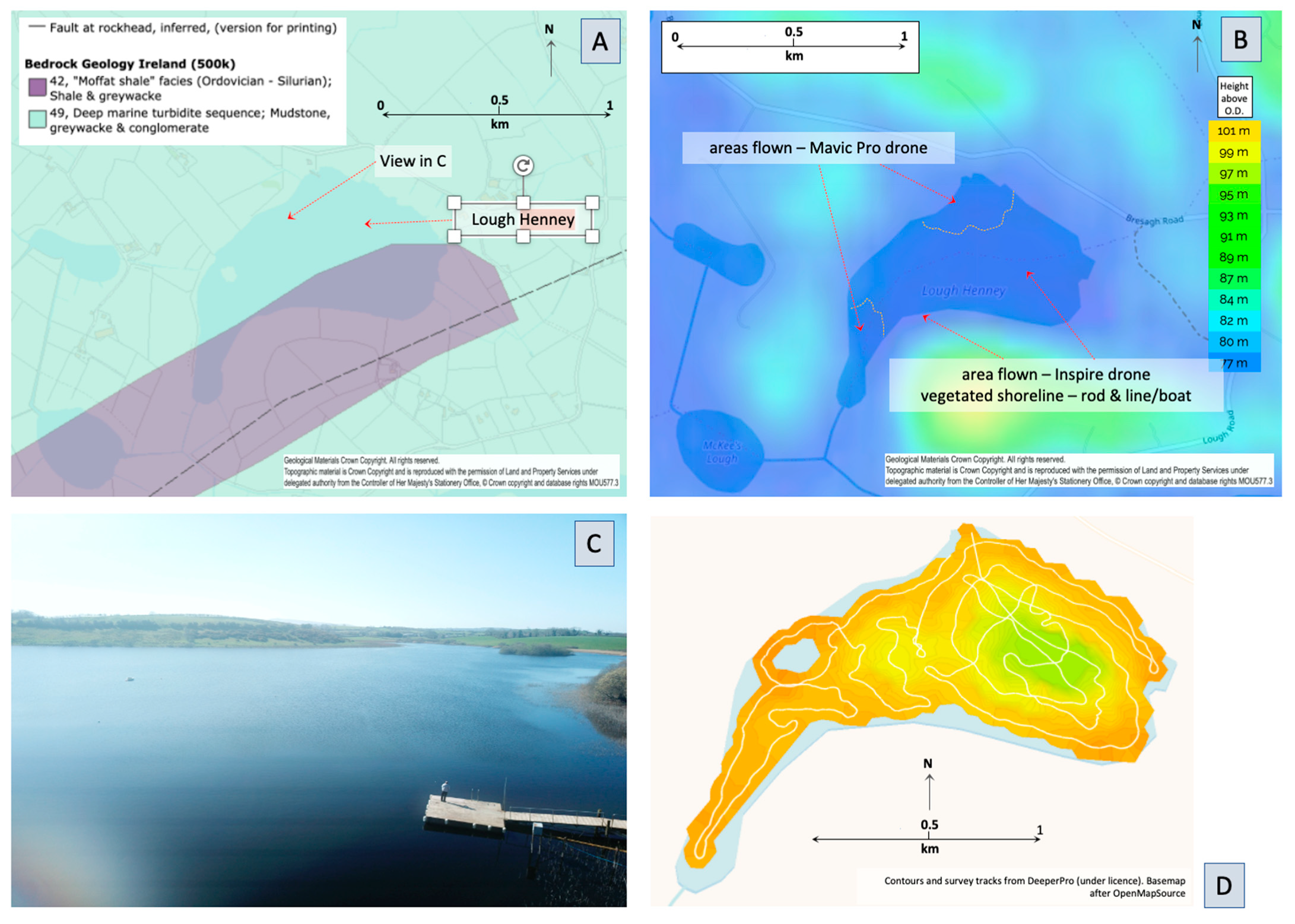
3. Drone Sonar: Study Sites and Data Acquisition
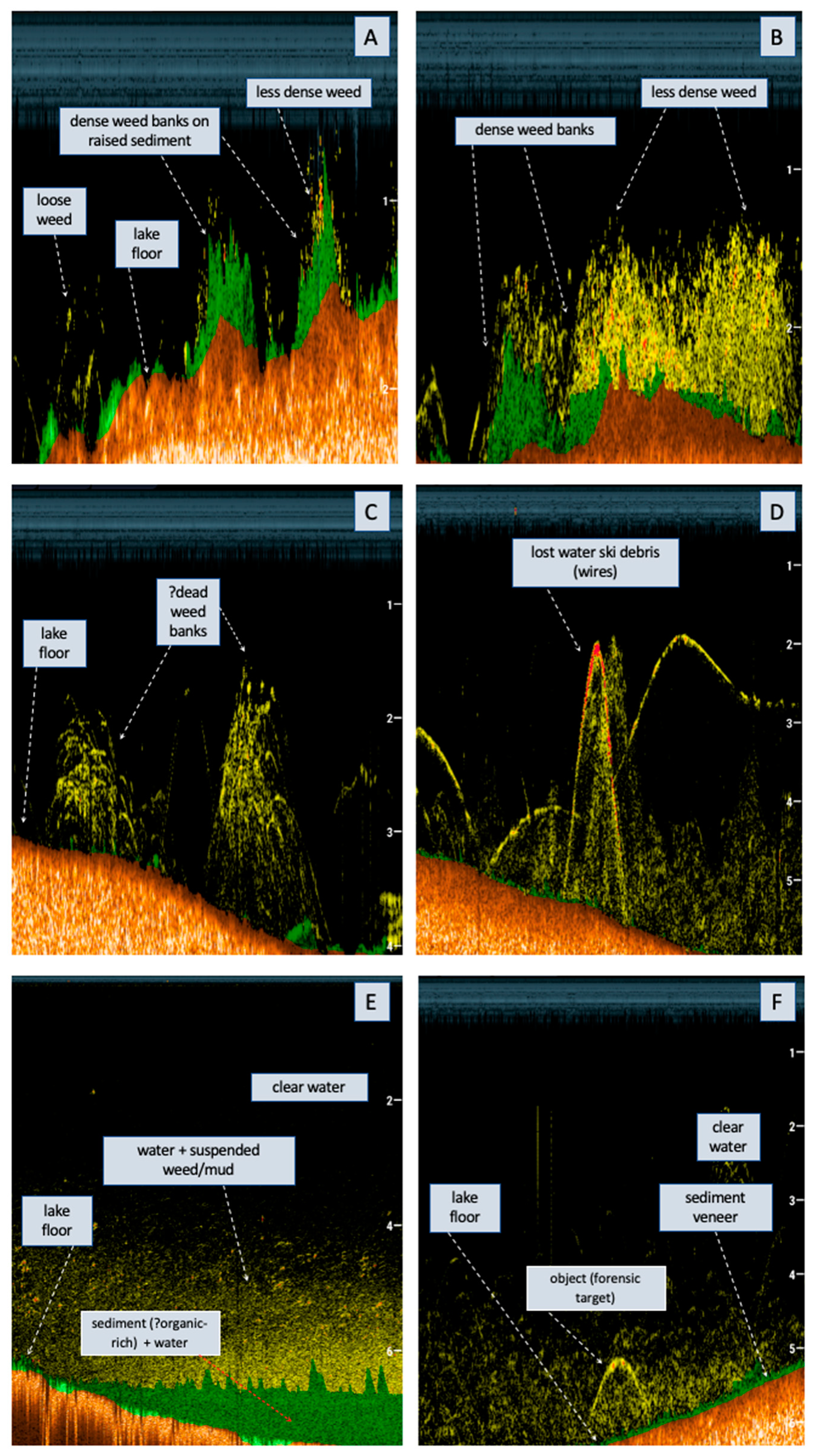
4. Initial Results
5. Validation
6. Future Applications and Limitations
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Donnelly, L.J.; Harrison, M. Geoforensic search strategy (GSS): Ground searches related to homicide graves, terrorism and serious and organised crime. In A Guide to Forensic Geology; Donnelly, L.J., Pirrie, D., Harrison, M., Ruffell, A., Dawson, L.A., Eds.; Geological Society: London, UK, 2021; pp. 21–49. [Google Scholar]
- Somers, M.L.; ARStubbs, A.R. Sidescan sonar. IEE Proc. F Commun. Radar Signal Process. 1984, 131, 243–256. [Google Scholar] [CrossRef]
- Becker, R.F. Underwater Forensic Investigation; CRC Press: Roca Baton, FL, USA, 2021; p. 371. [Google Scholar]
- Schultz, J.J.; Healy, C.A.; Parker, K.; Lowers, B. Detecting submerged objects: The application of side scan sonar to forensic contexts. Forensic Sci. Int. 2013, 231, 306–316. [Google Scholar] [CrossRef] [PubMed]
- Hodges, R.P. Underwater Acoustics: Analysis, Design and Performance Sonar; Wiley: Chichester, UK, 2010; 376p. [Google Scholar]
- Healy, C.A.; Schultz, J.J.; Parker, K.; Lowers, B. Detecting submerged bodies: Controlled research using side-scan sonar to detect submerged proxy cadavers. J. Forensic Sci. 2015, 60, 743–752. [Google Scholar] [CrossRef] [PubMed]
- Blondel, P. Searching for dead bodies with sonar. In Drowning: Prevention, Rescue, Treatment; Bierens, J.J.L.M., Ed.; Springer: New York, NY, USA, 2014; pp. 1161–1165. [Google Scholar]
- Lafferty, B.; Quinn, R.; Breen, C. A side-scan sonar and high resolution CHIRP sub-bottom profile study of the natural and anthropogenic sedimentary record of Lower Lough Erne, northwestern Ireland. J. Archaeol. Sci. 2005, 33, 756–766. [Google Scholar] [CrossRef]
- Jackson, D.R.; Baird, A.M.; Crisp, J.J.; Thomson, P.A.G. High-frequency bottom backscatter measurements in shallow water. J. Acoust. Soc. Am. 1986, 80, 1188–1199. [Google Scholar] [CrossRef]
- Bandini, F.; Olesen, D.; Jakobsen, J.; Kittel, C.M.M.; Wang, S.; Garcia, M.; Bauer-Gottwein, P. Bathymetry observations of inland water bodies using a tethered sing-beam sonar controlled by an Unmanned Aerial Vehicle. Hydrol. Earth Syst. Sci. 2008, 25, 4549–4565. [Google Scholar]
- Giambastiani, Y.; Giustic, R.; Cecchi, S.; Palomba, F.; Manettis, F.; Romanelle, S.; Bottai, L. Volume estimation of lakes and reservoirs based on aquatic drone surveys: The case study of Tuscany, Italy. J. Water Land Dev. 2020, 46, 84–96. [Google Scholar]
- Gutowski, M.; Bull, J.; Dix, J.; Henstock, T.; Hogarth, P.; Hiller, T.; Leighton, T.; White, P. Three-dimensional high resolution acoustic imaging of the sub-seabed. J. Appl. Acoust. 2008, 68, 412–421. [Google Scholar] [CrossRef]
- Stoelzle, M.; Stein, L. Rainbow color map distorts and misleads research in hydrology–guidance for better visualizations and science communication. Hydrol. Earth Syst. Sci. 2021, 25, 4549–4565. [Google Scholar] [CrossRef]
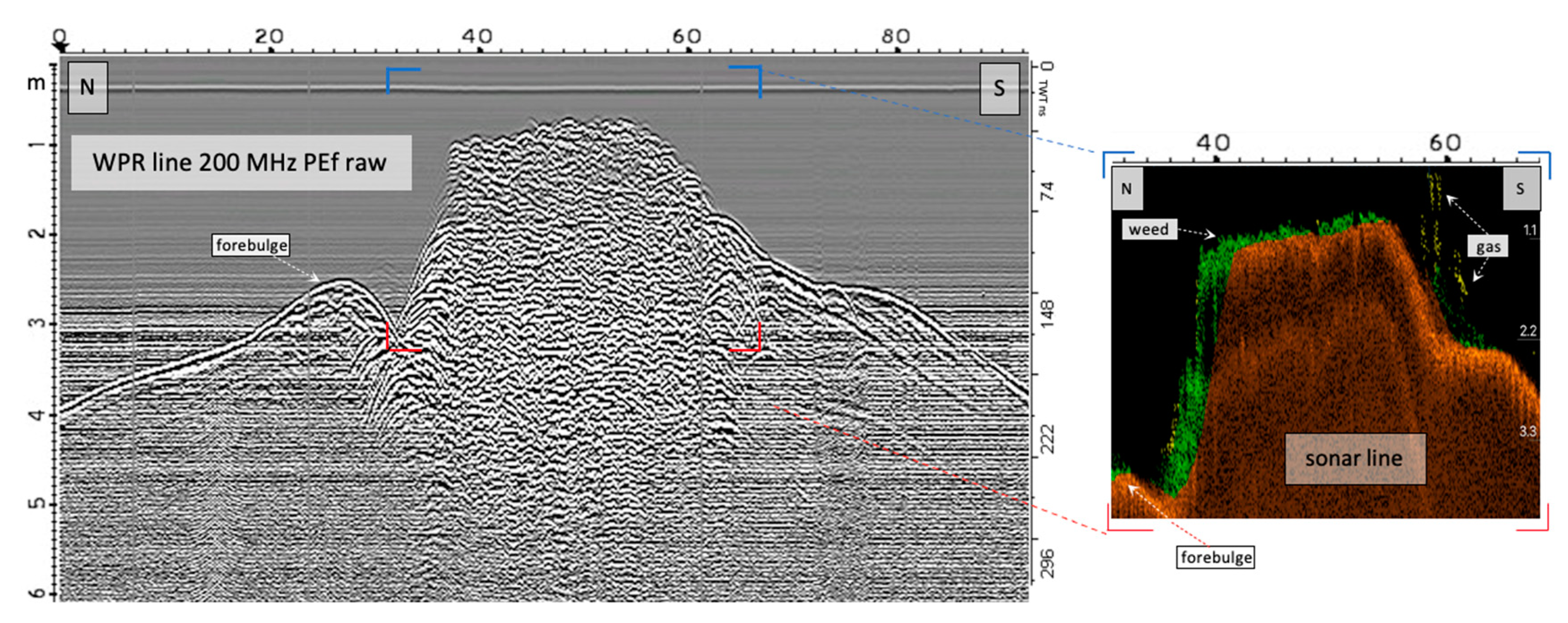
- Ruffell, A.; King, L. Water penetrating radar (WPR) in Archaeology: A Crannog case study. J. Archaeol. Sci. Rep. 2021. in preparation. [Google Scholar]
- Ruffell, A.; Parker, R. Water penetrating radar. J. Hydrol. 2021, 597, 126300. [Google Scholar] [CrossRef]
- Saponaro, A.; Dipierro, G.; Cannella, E.; Panarese, A.; Galiano, A.M.; Massaro, A. A UAV-GPR fusion approach for the characterisation of a quarry excavation area in Falconara Albanese, Southern Italy. Drones 2021, 5, 40. [Google Scholar] [CrossRef]
- Wilson, B.D.; Madsen, J.A. Acoustical Methods for Bottom and Sub-bottom Imaging in Estuaries: Benthic Mapping Project to Identify and Map the Bottom Habitat and Sub-Bottom Sediments of Delaware Bay. Sea Technol. 2006, 47, 43–46. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Deeper Smart Sonar Pro+ | Deeper CHIRP+ 2 | |
|---|---|---|
| Wide angle sonar beam frequency | 55°—90 kHz | 47°—100 kHz |
| Narrow angle sonar beam frequencies | 15°—290 kHz | 20°—240 kHz 7°—675 kHz |
| Weight | 92 g | 100 g |
| Built in GPS | Yes | Yes |
| Minimum scanning depth | 50 cm | 15 cm |
| Maximum scanning depth | 80 m | 100 m |
| WiFi range | 100 m | 120 m |
| Target separation | 2.5 cm | 1 cm |
| Record water temperature | Yes | Yes |
| Battery Life | 6 h | 15 h |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruffell, A.; Lally, A.; Rocke, B. Dronar—Geoforensic Search Sonar from a Drone. Forensic Sci. 2021, 1, 202-212. https://doi.org/10.3390/forensicsci1030018
Ruffell A, Lally A, Rocke B. Dronar—Geoforensic Search Sonar from a Drone. Forensic Sciences. 2021; 1(3):202-212. https://doi.org/10.3390/forensicsci1030018
Chicago/Turabian StyleRuffell, Alastair, Amy Lally, and Benjamin Rocke. 2021. "Dronar—Geoforensic Search Sonar from a Drone" Forensic Sciences 1, no. 3: 202-212. https://doi.org/10.3390/forensicsci1030018
APA StyleRuffell, A., Lally, A., & Rocke, B. (2021). Dronar—Geoforensic Search Sonar from a Drone. Forensic Sciences, 1(3), 202-212. https://doi.org/10.3390/forensicsci1030018