
Towards a Long-Term Unmanned Aerial Vehicle (UAV) Monitoring Framework for Post-Mining Effects: Prosper-Haniel Case




Abstract
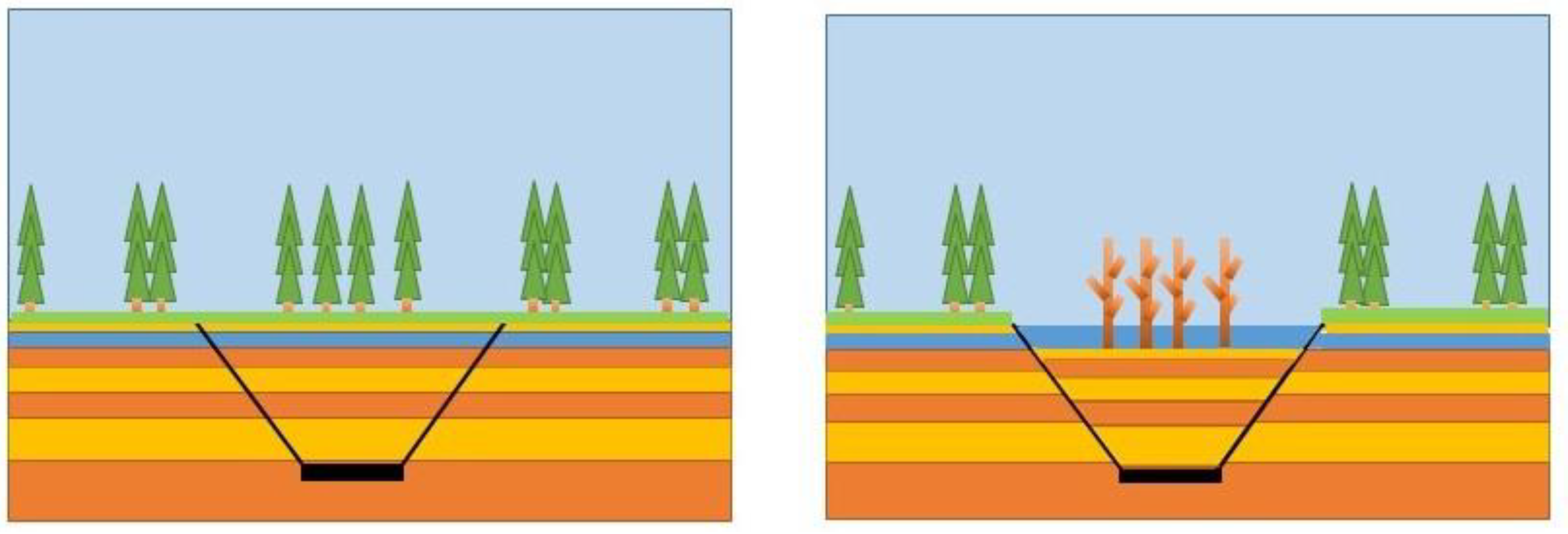
1. Introduction
2. Materials and Methods
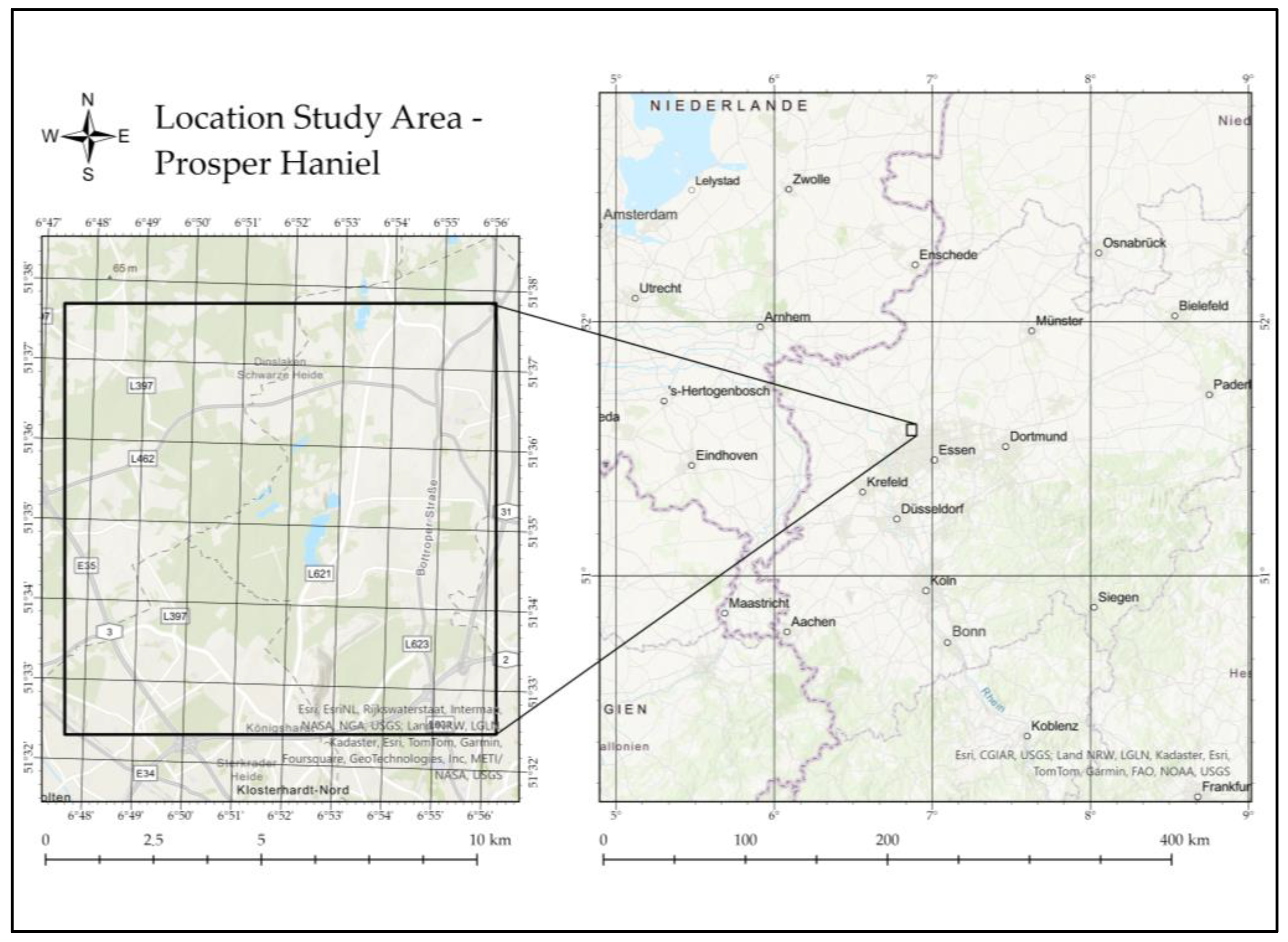
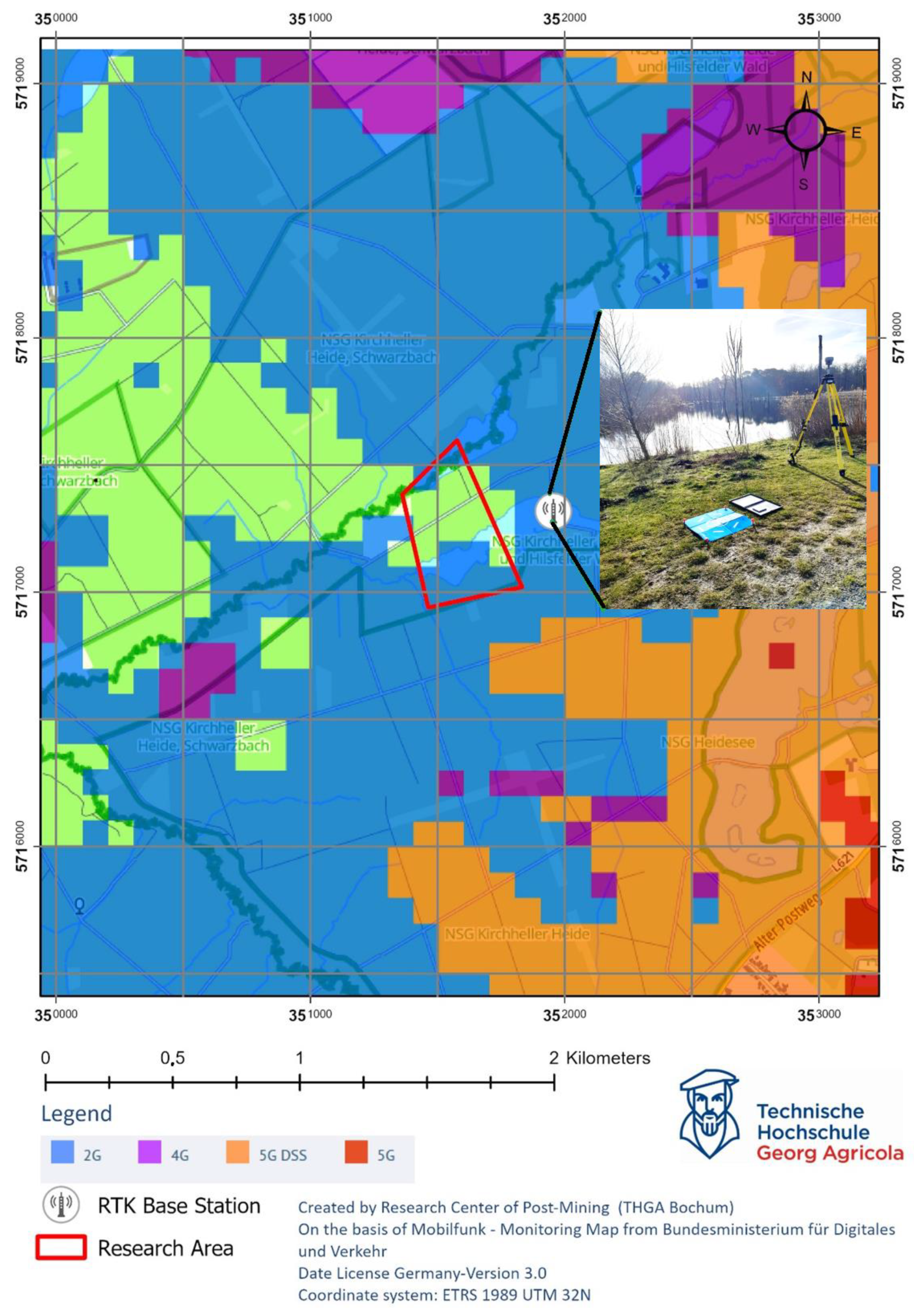
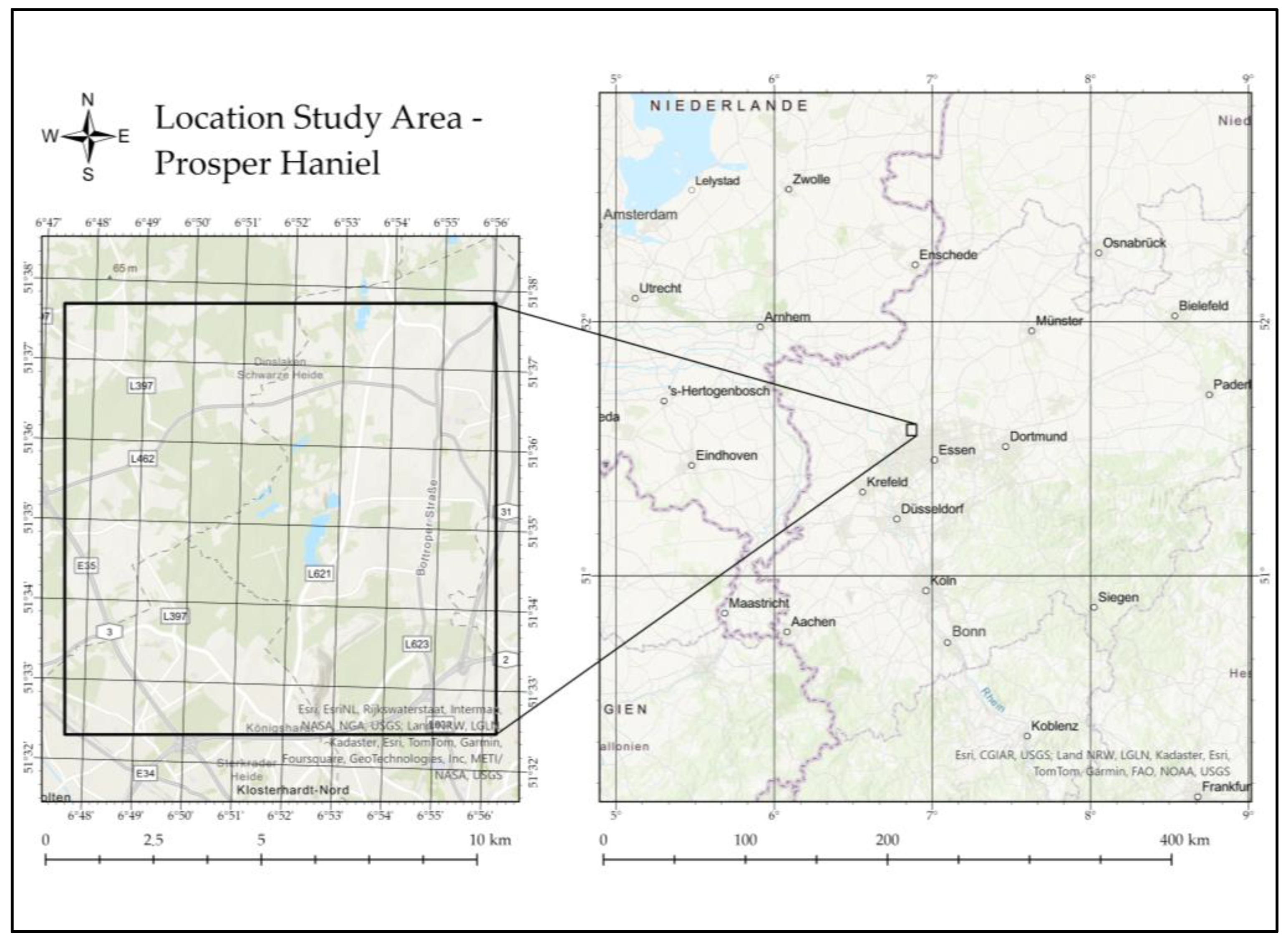
2.1. Research Area
2.2. Materials
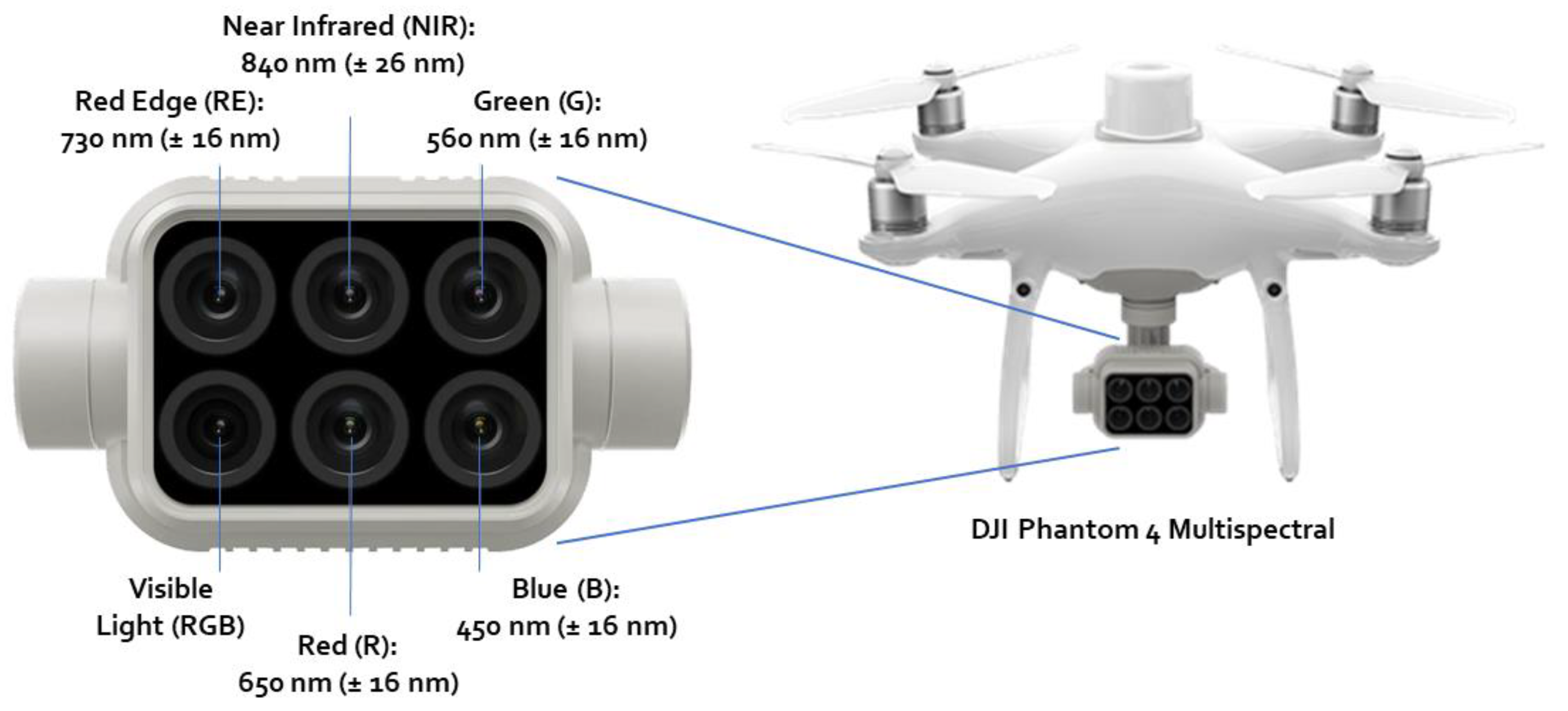
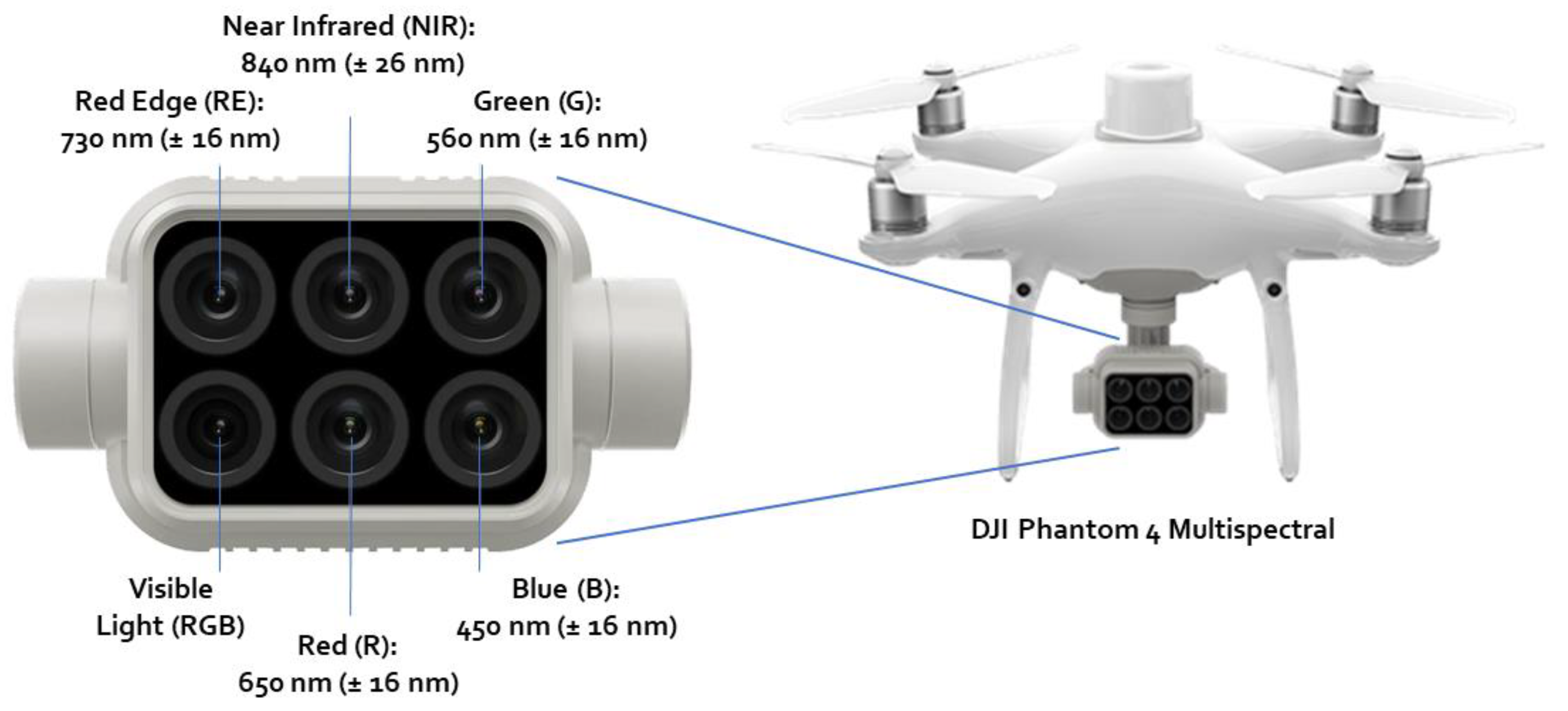
2.2.1. DJI Phantom 4 Multispectral
2.2.2. DJI Mavic 2 Enterprise Advance Thermal
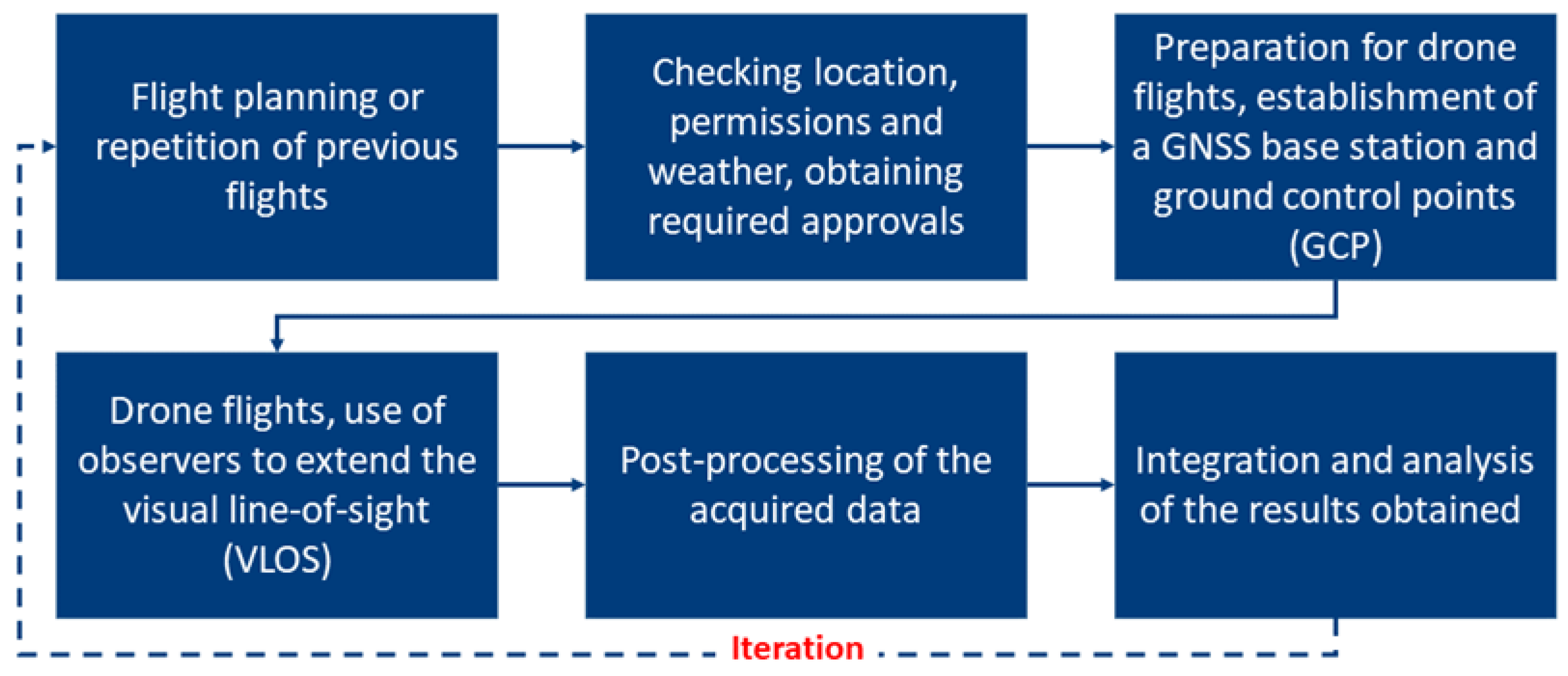
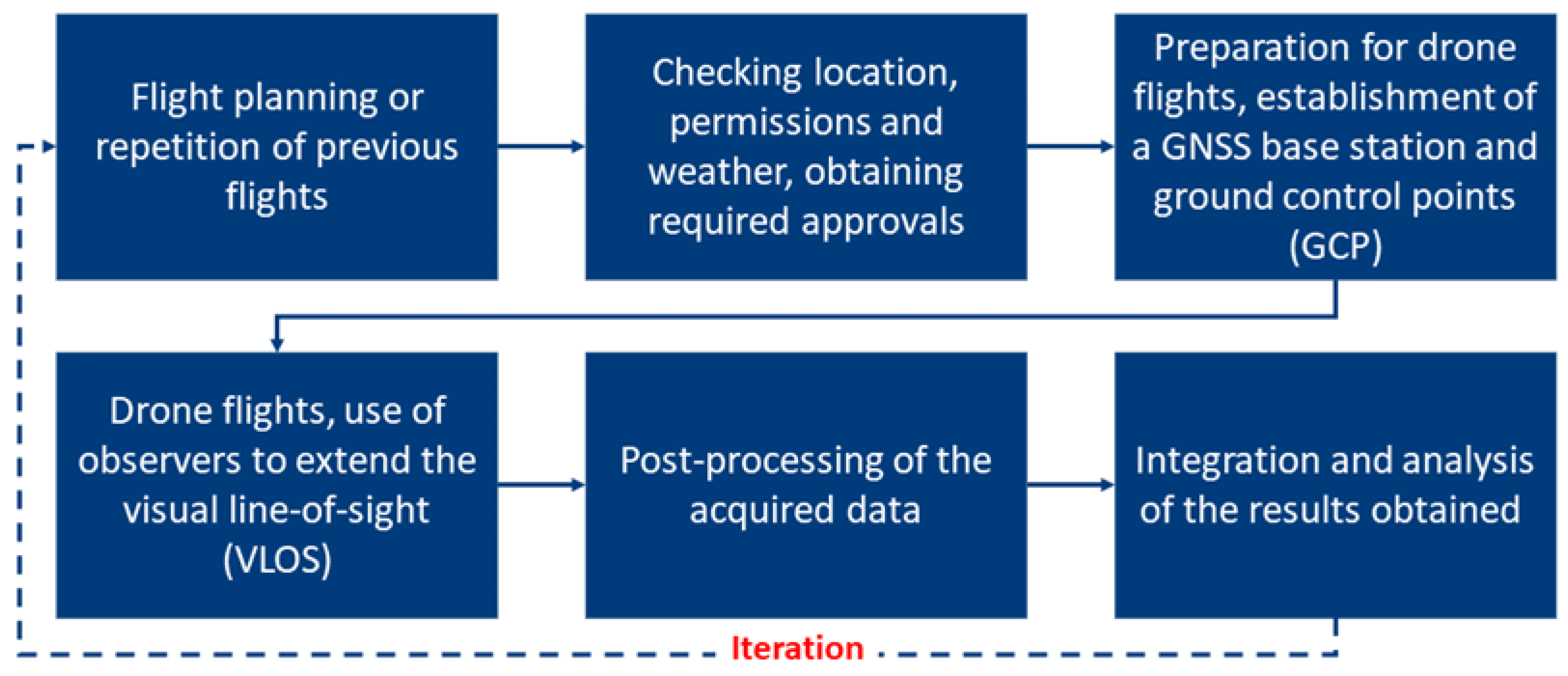
2.3. Methodology
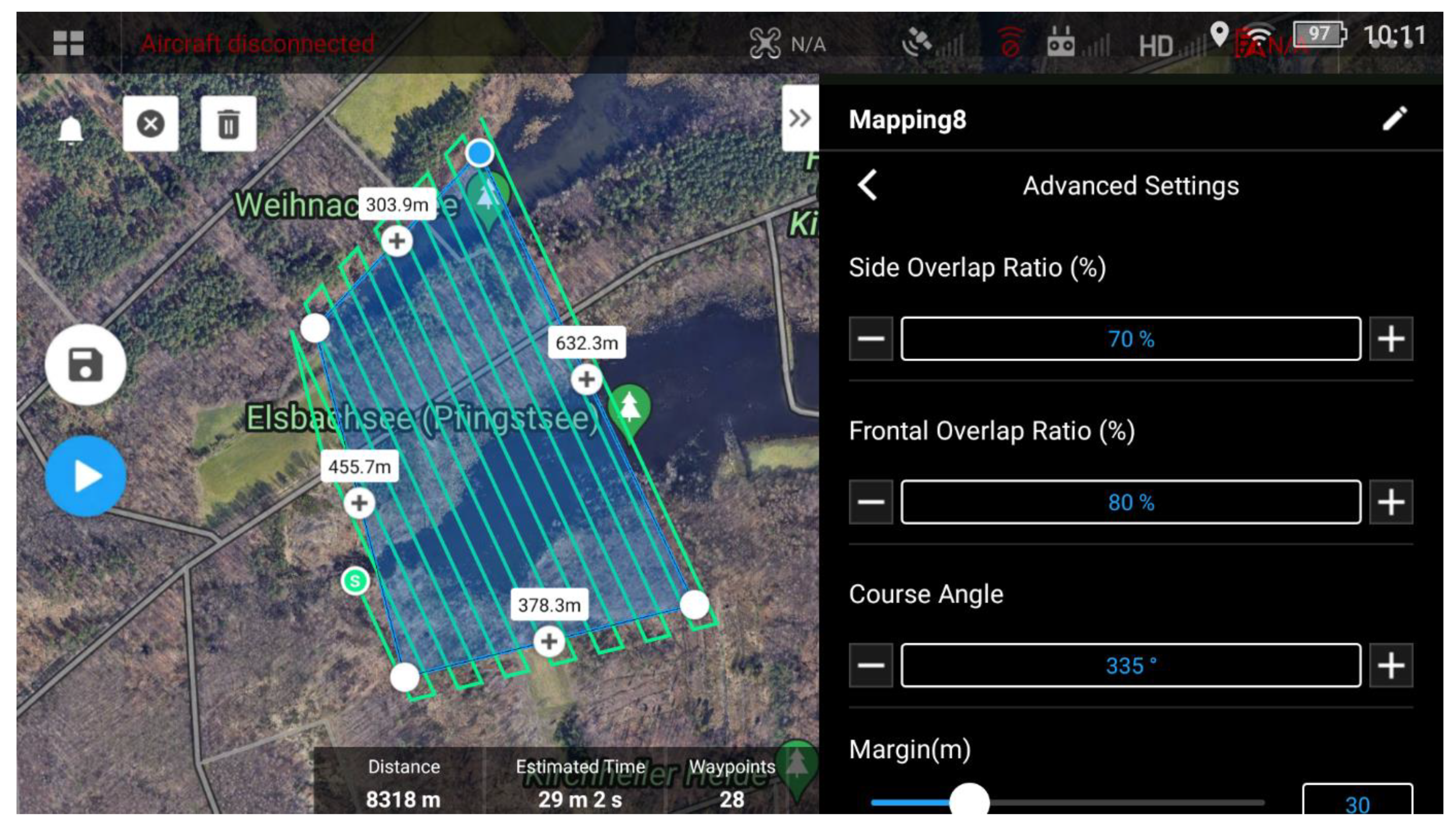
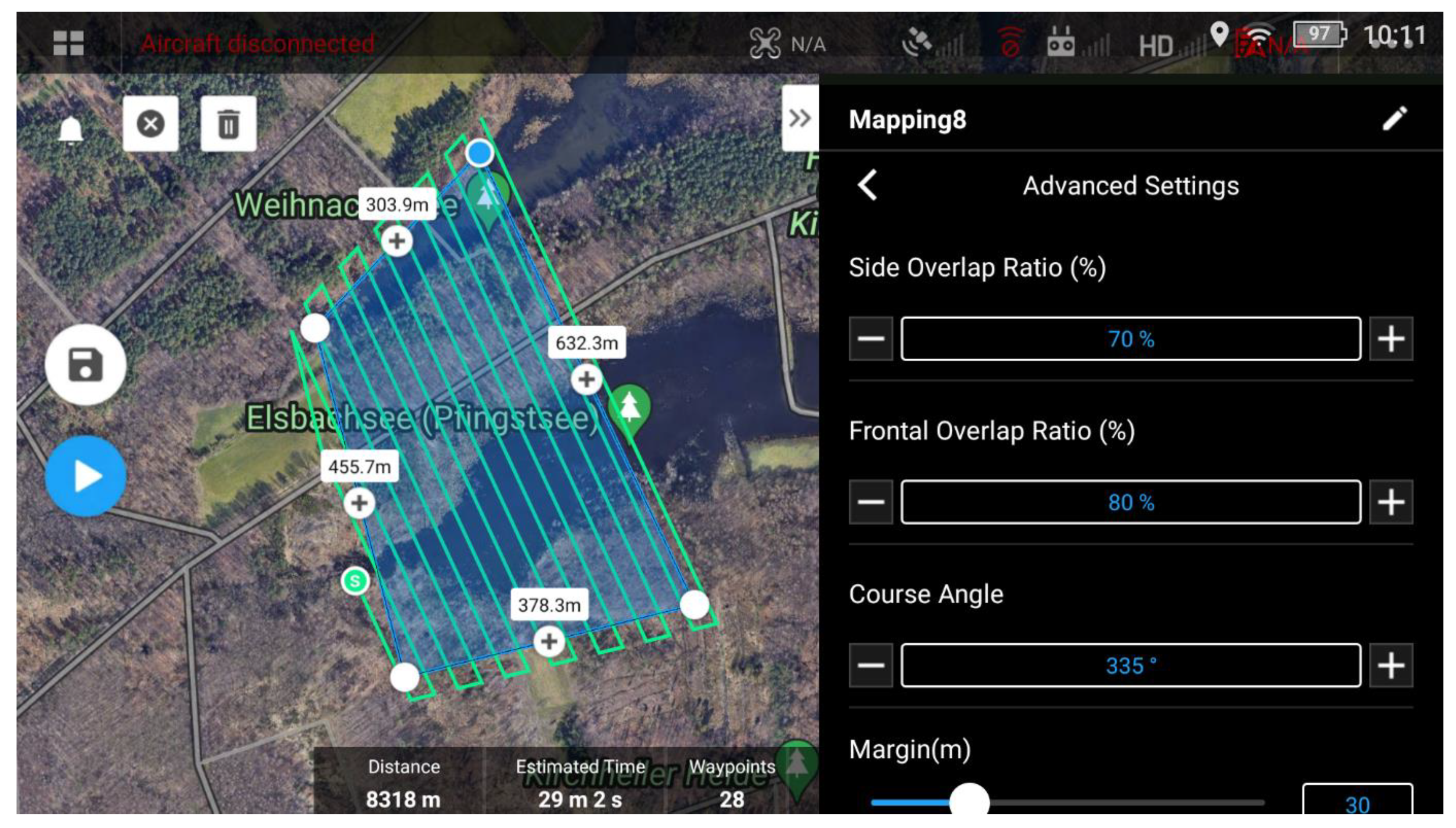
2.3.1. Pre-Planning of the Flights
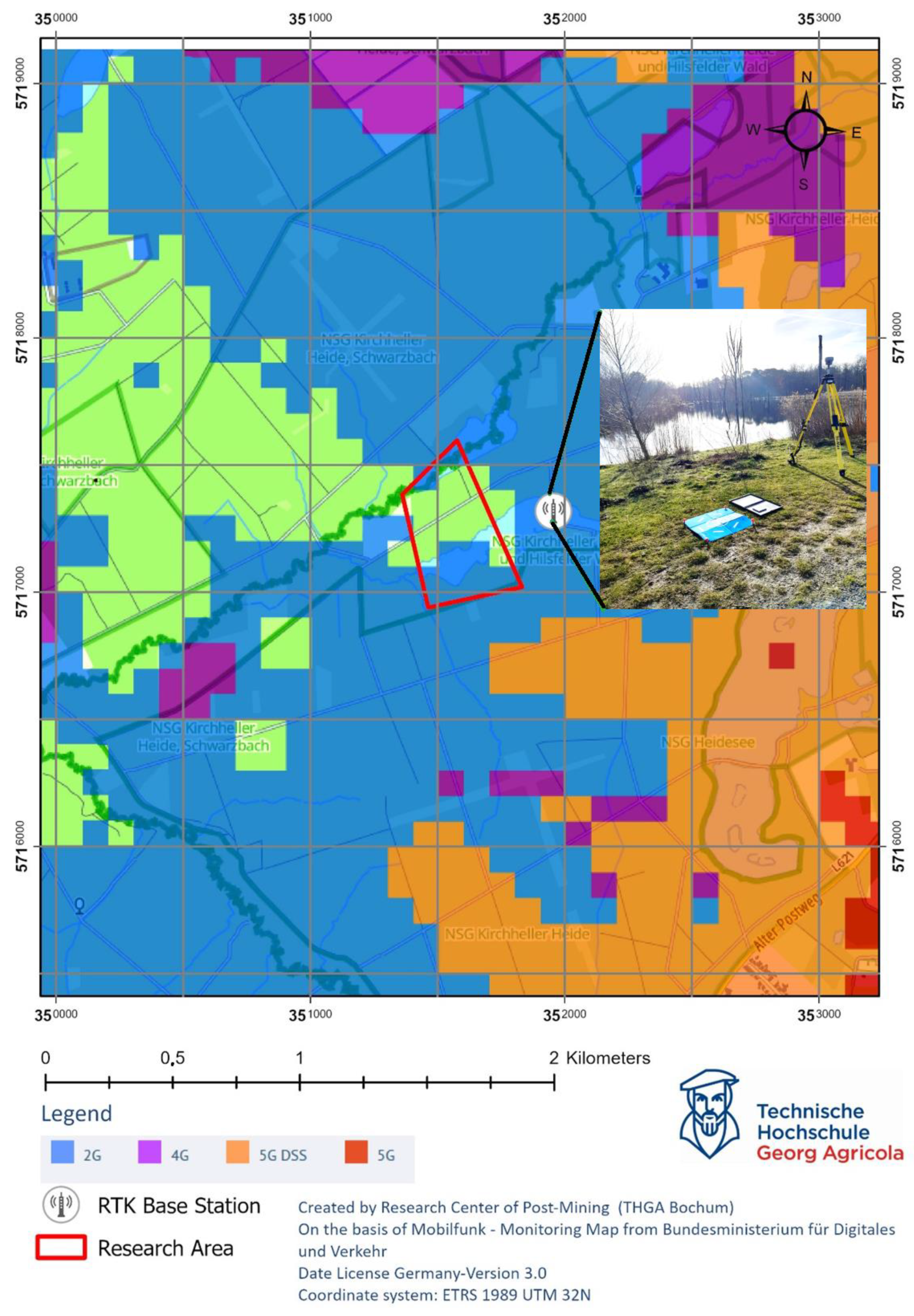
2.3.2. Preparation of Drone Flights
2.3.3. Drone Flights
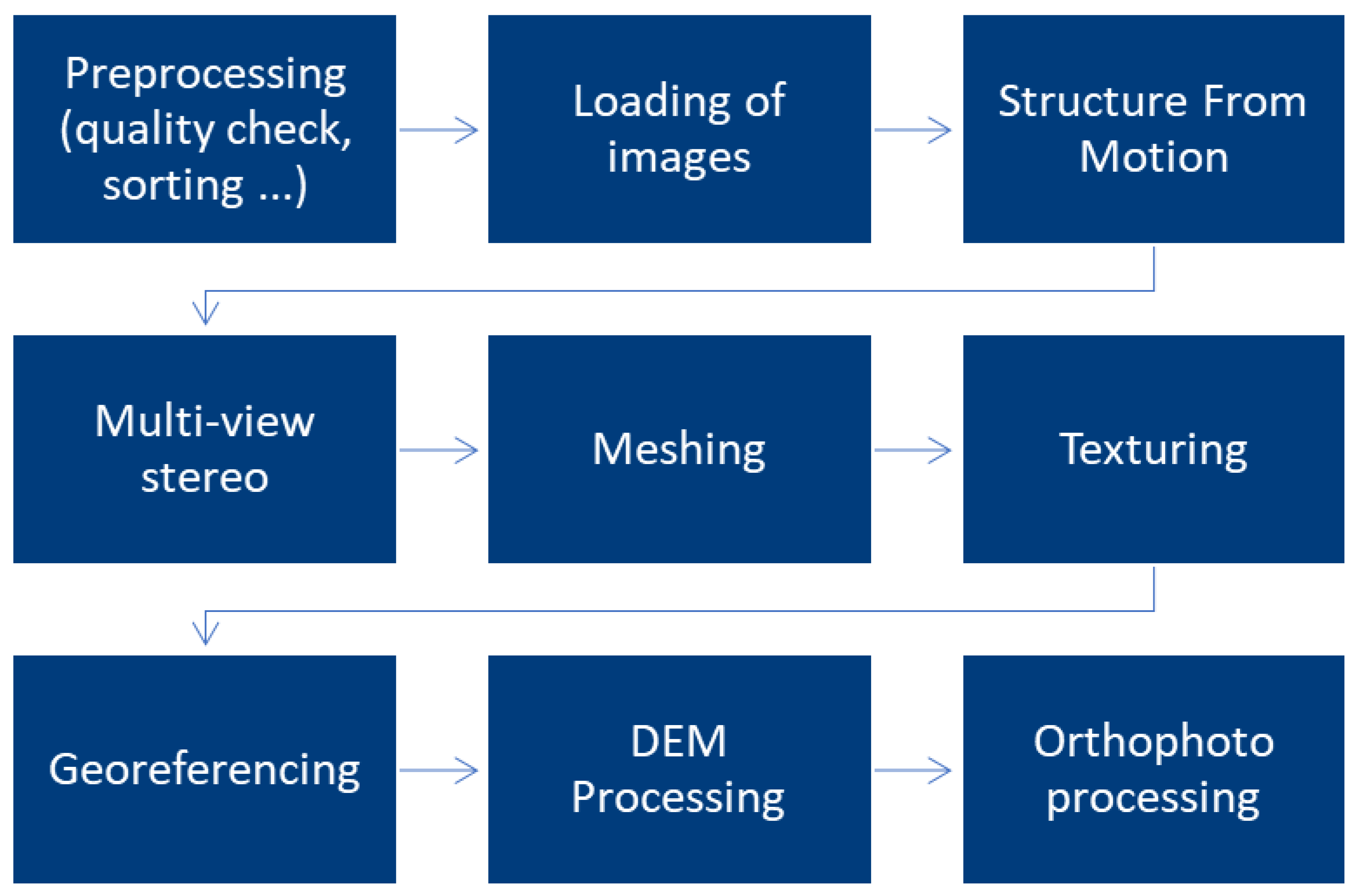
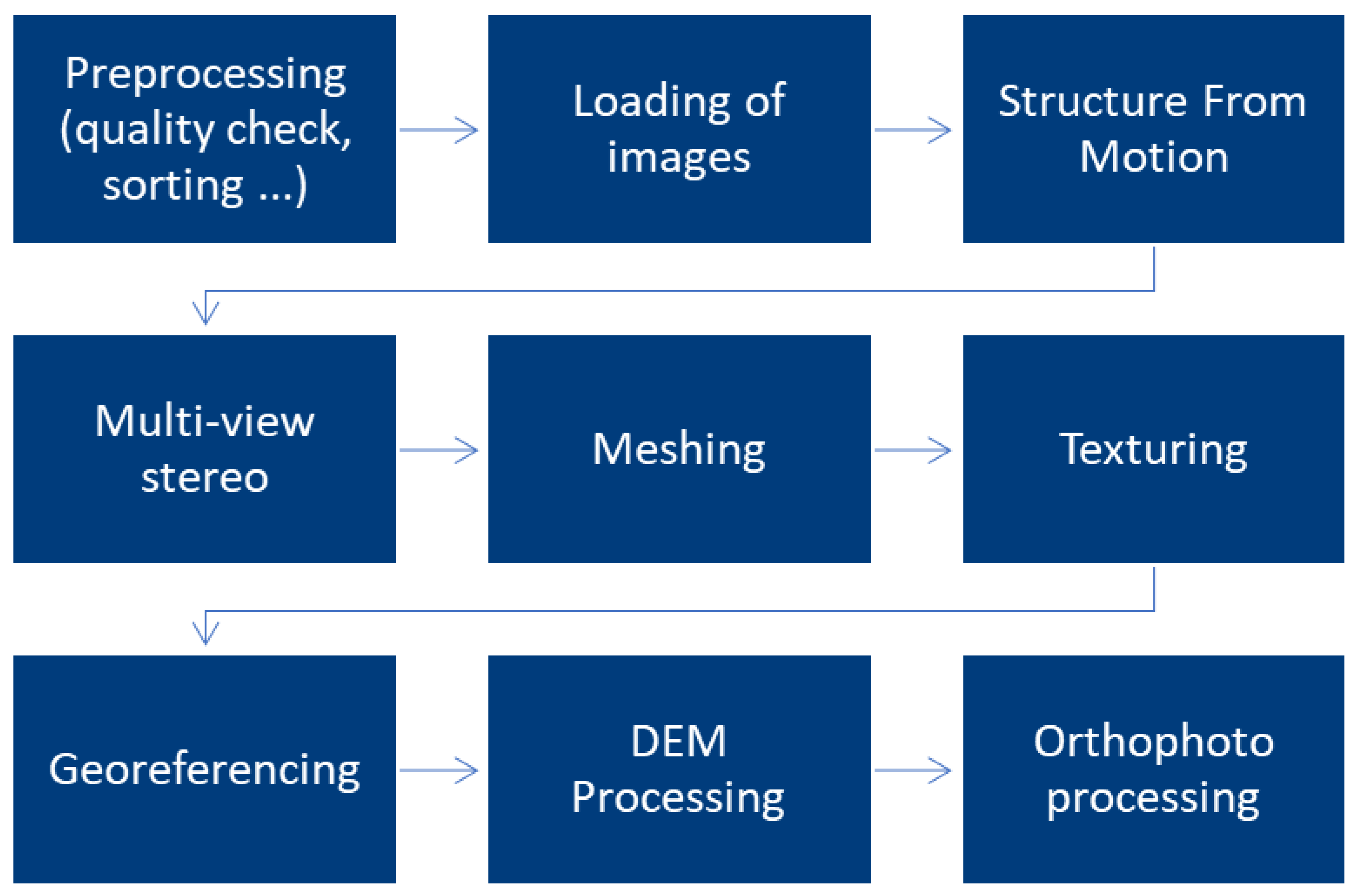
2.3.4. Post-Processing
Multispectral
Thermal Infrared and RGB
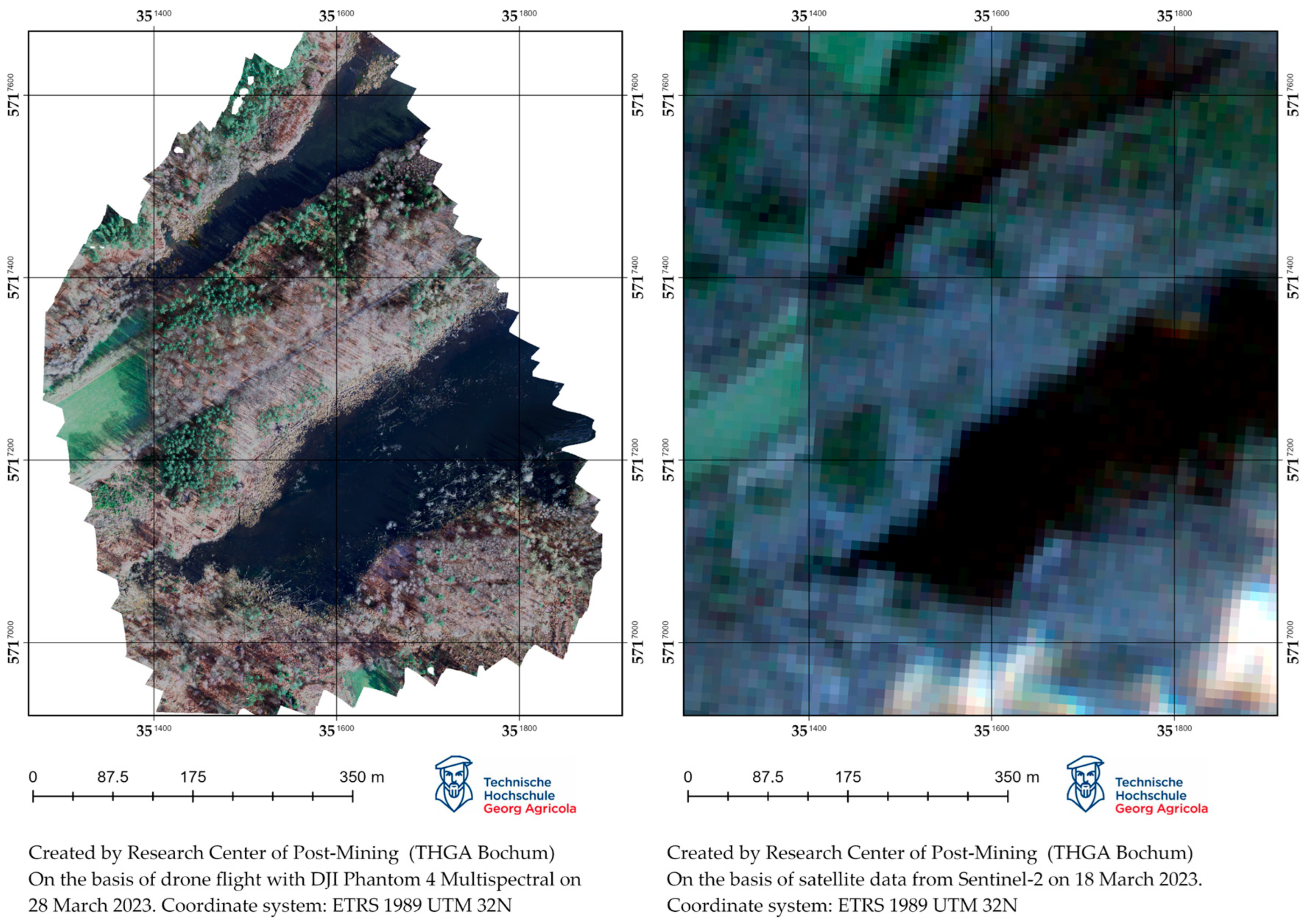
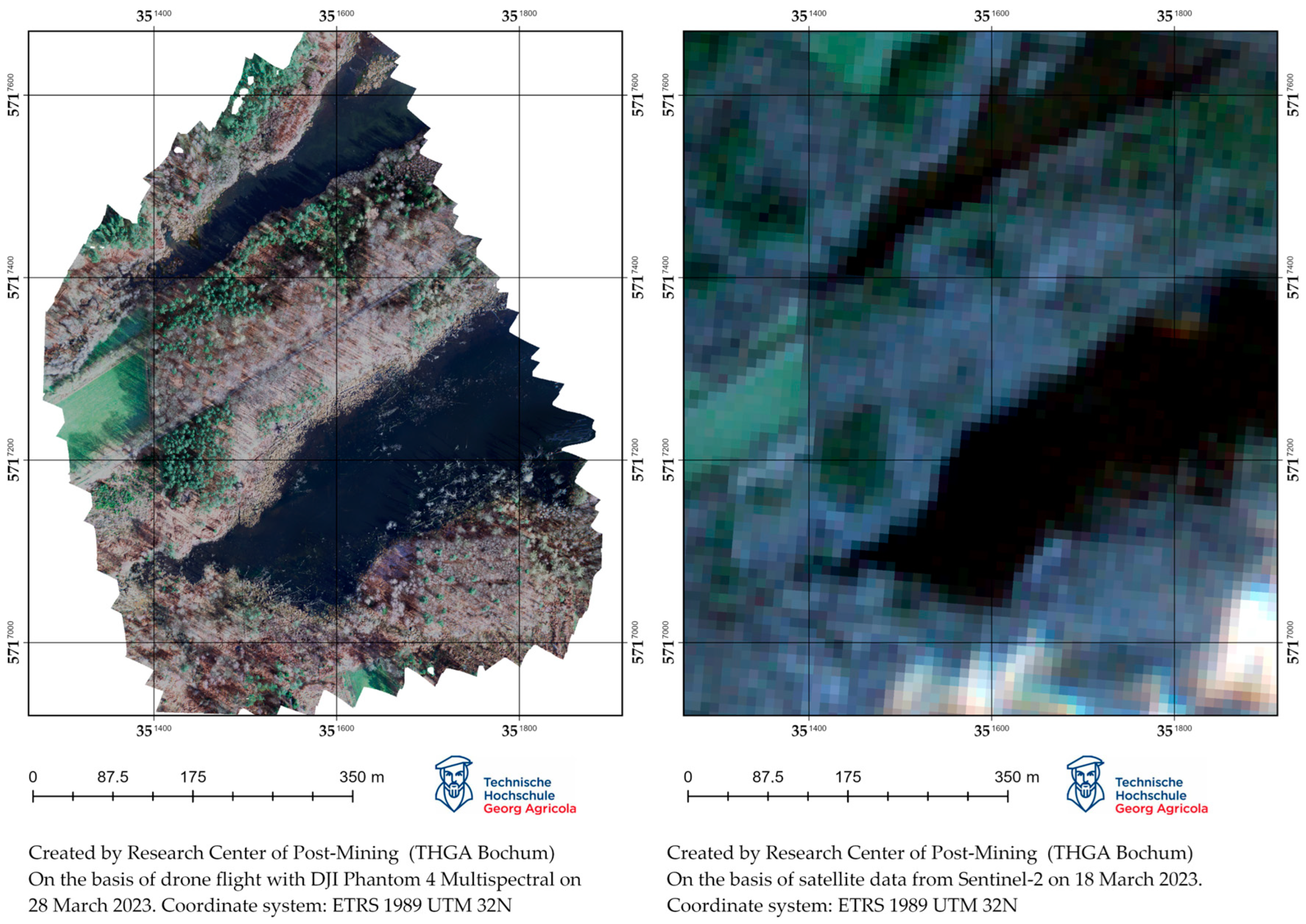
3. Results
- -
- individual images;
- -
- orthophoto map;
- -
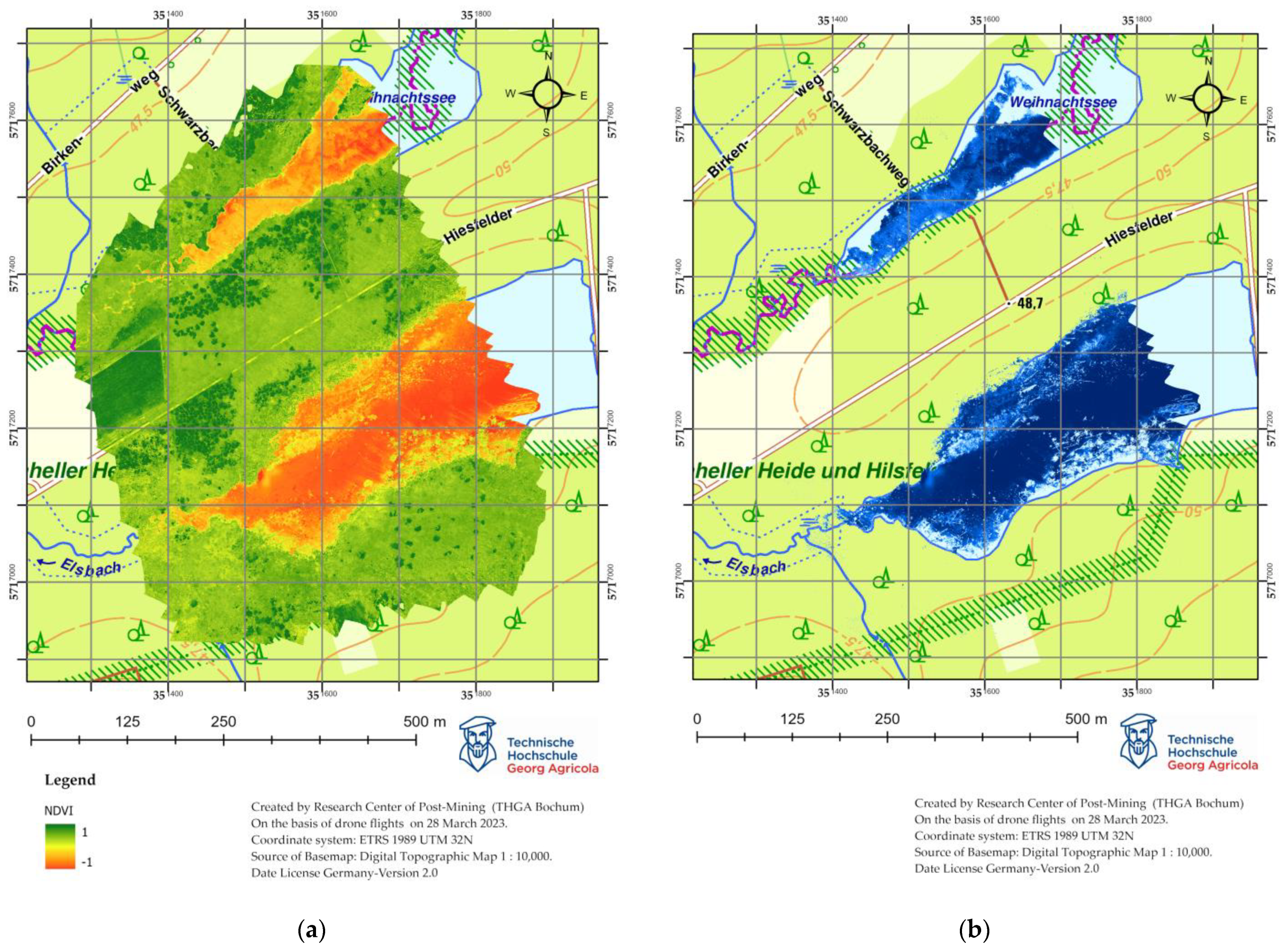
- calculated vegetation indices on the basis of multispectral drone flights;
- -
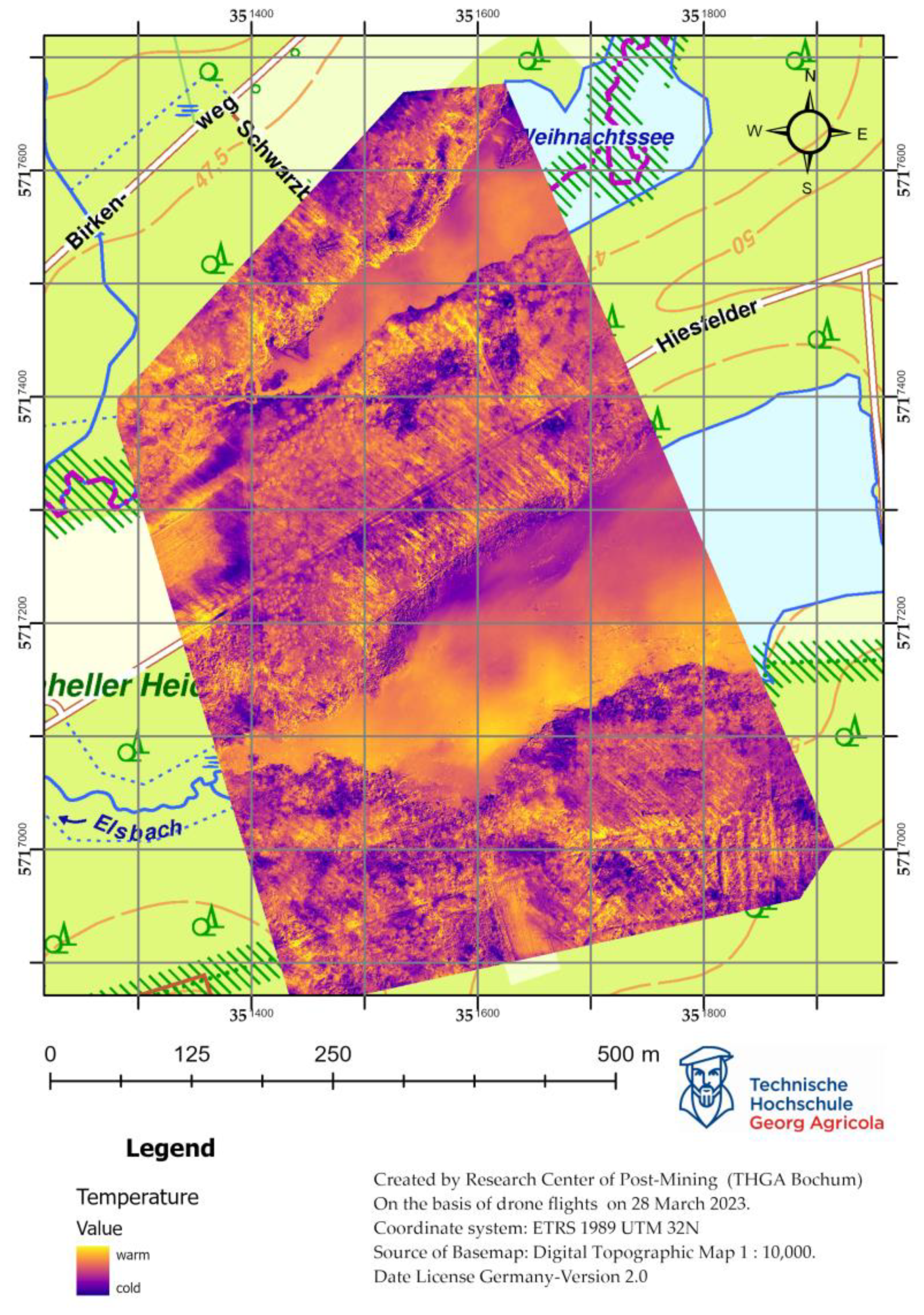
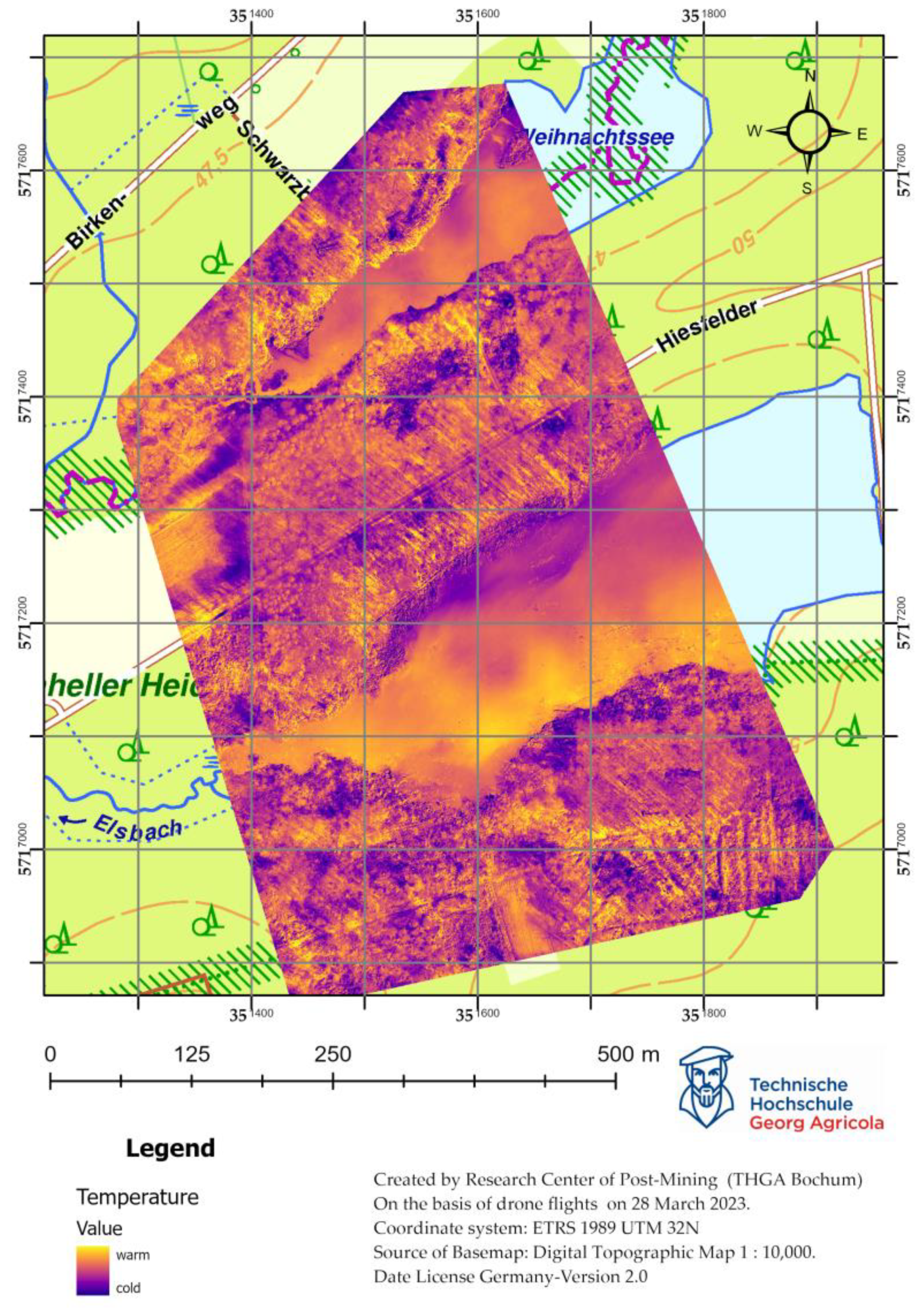
- thermal orthophoto map;
- -
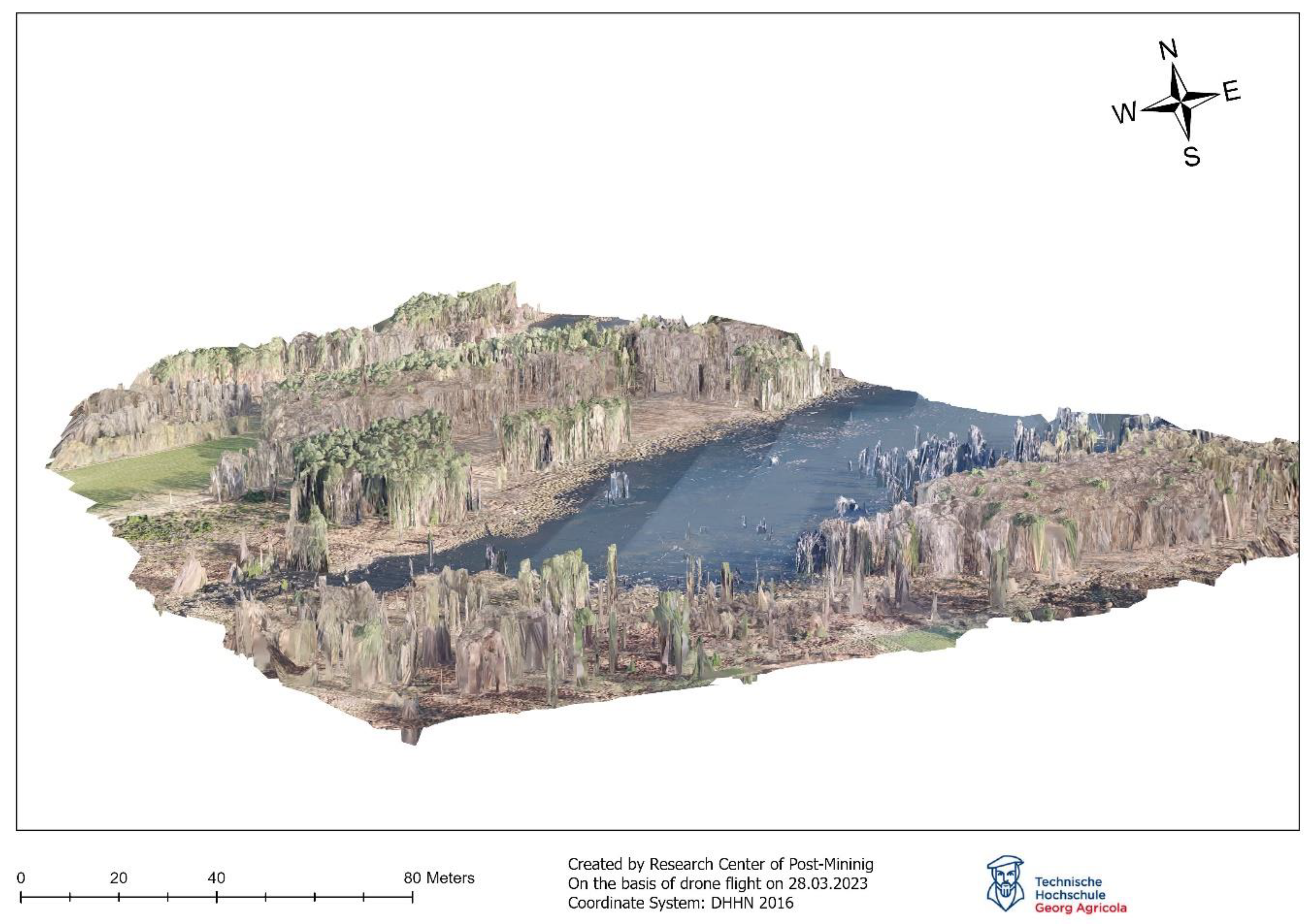
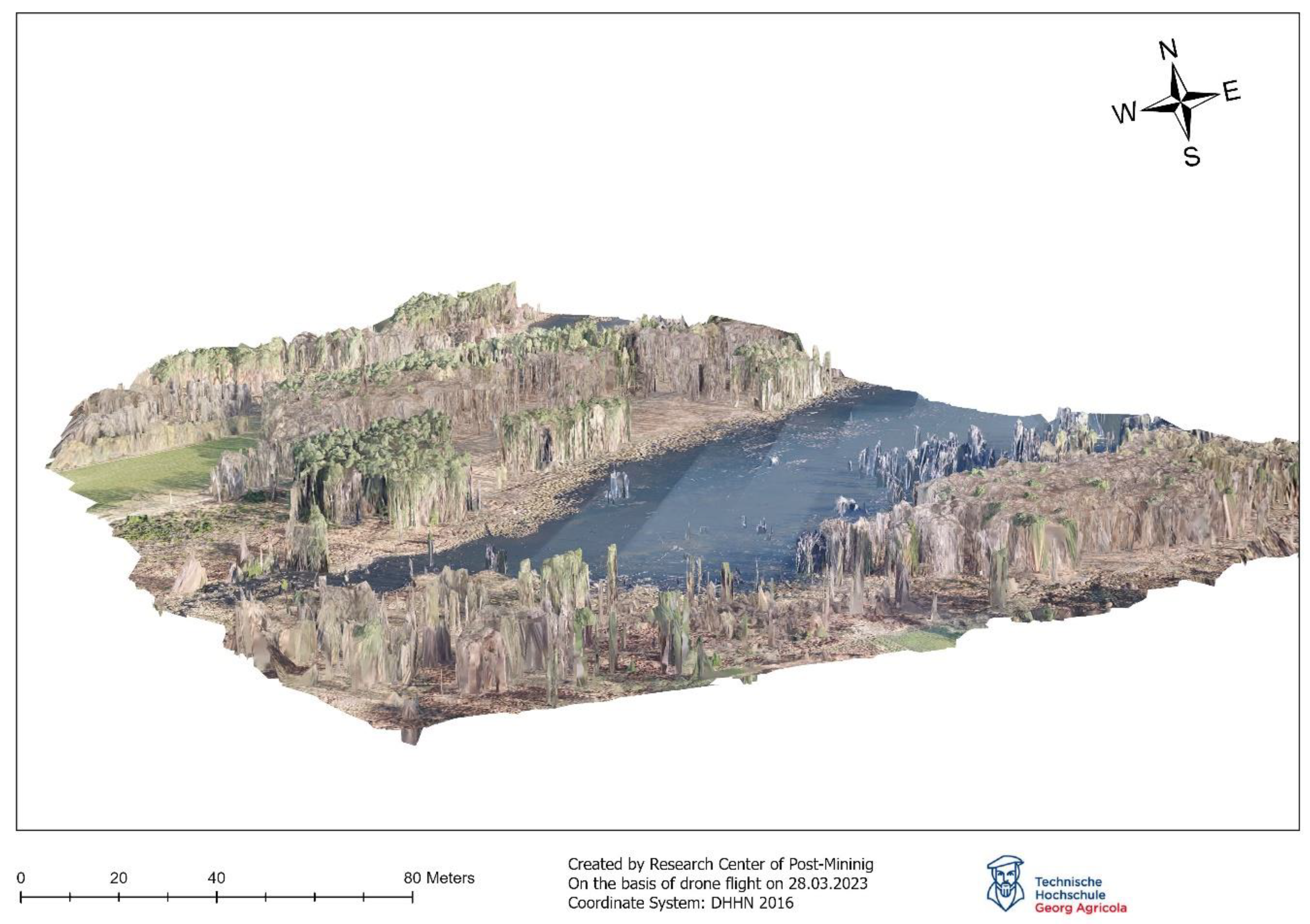
- digital terrain model (DTM);
- -
- digital surface model (DSM).
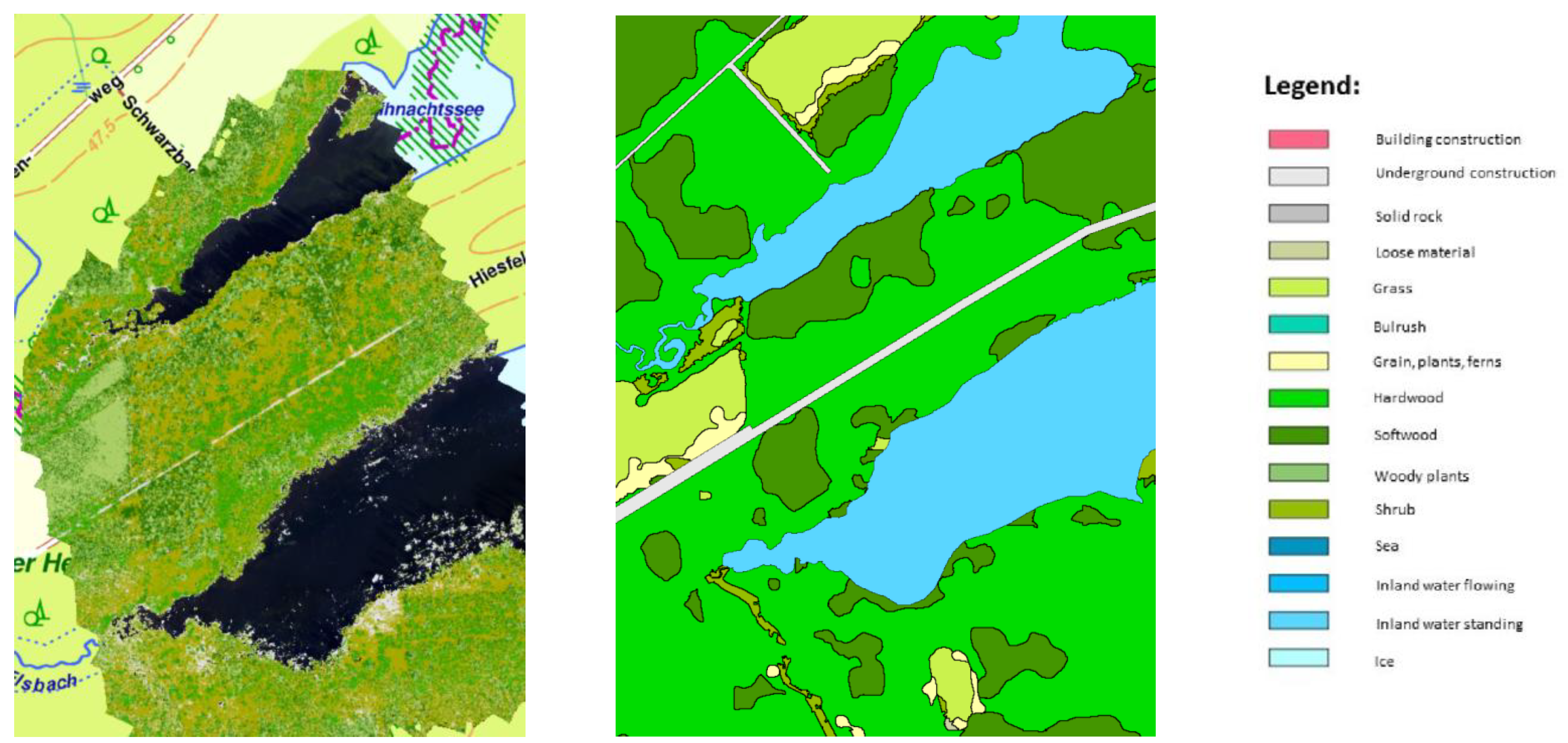
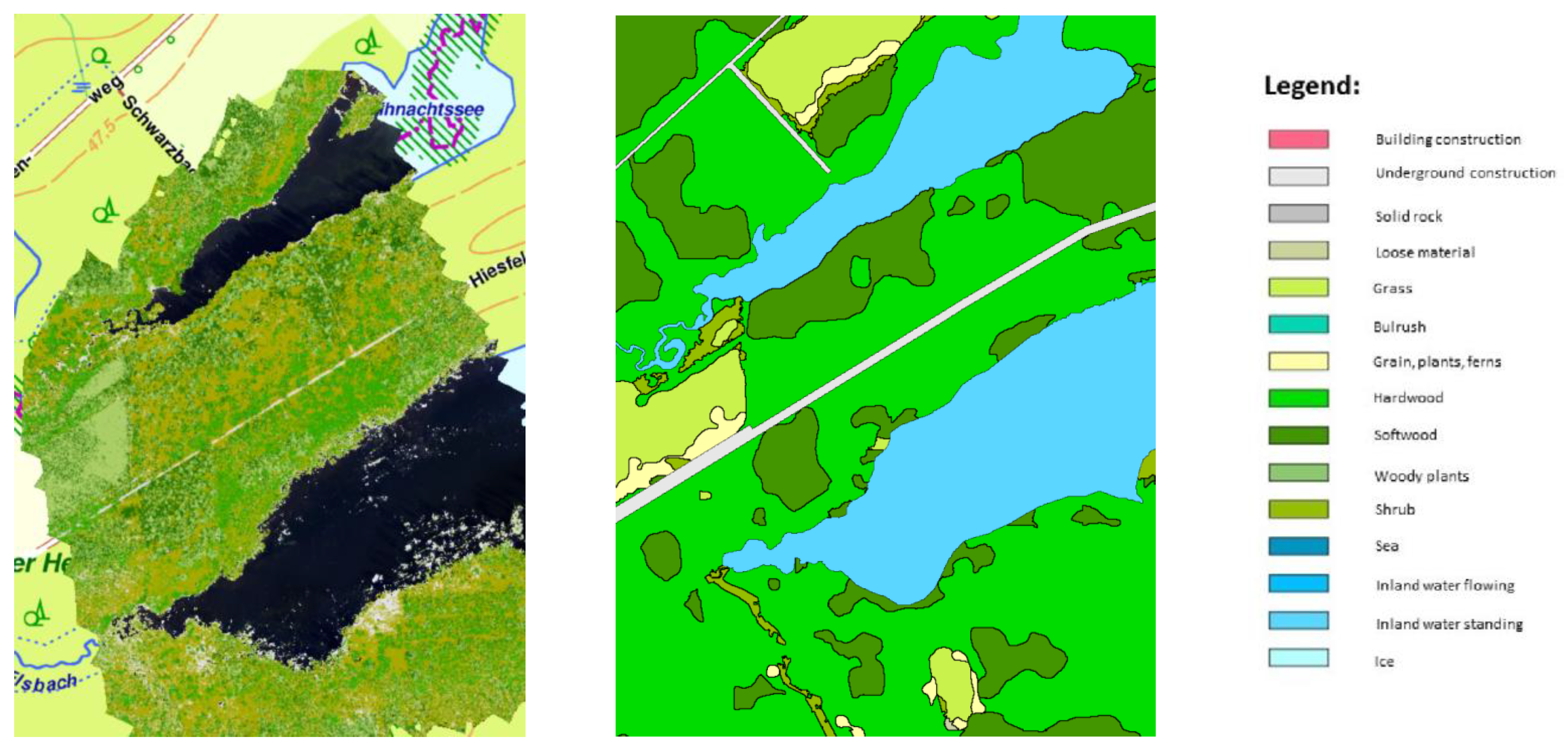
3.1. Updating and Revising Land Classifications
- -
- Vegetation;
- -
- Grass,
- -
- Shrub,
- -
- Hardwood,
- -
- Street;
- -
- Water.
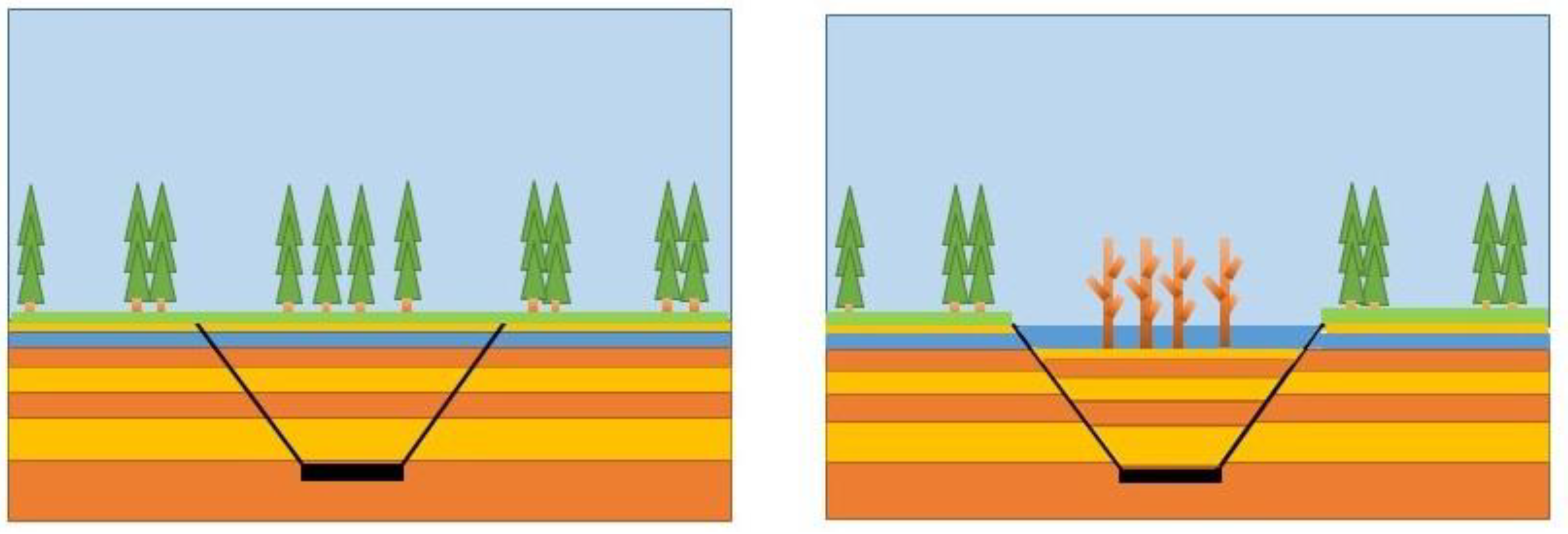
3.2. Identification of Water Surfaces and Coastline
3.3. Identification of Flowing Water on the Basis of Thermal Orthophoto
4. Discussion
- -
- Slope map, which illustrates the terrain’s slope, can be utilized to calculate rainfall-runoff, aiding in the development of flood control programs;
- -
- Exposure map, facilitating the examination of sunlight impact in specific areas;
- -
- Visibility map, applicable in constructing observation towers for forestry and tourism, serving as viewpoints.
5. Conclusions
- -
- State of vitality and changes of vegetation, using vegetation indicators based on data obtained from a multispectral camera;
- -
- Verification and identification of vegetation types using machine learning algorithms—supervised classification;
- -
- Identification of water surfaces and detection coastline of water reservoirs;
- -
- Identification of the temperature of water surfaces and terrain using a thermal camera;
- -
- Creating digital terrain models to visualize the research area.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Spreckels, V.; Vosen, P.; Busch, W.; Fischer, C.; Matejka, H. Einsatz von Photogrammetrie, Fernerkundung und GIS im Umwelt monitoring der Deutsche Steinkohle AG. Markscheidewesen 2006, 113, 95–113. [Google Scholar]
- Kretschmann, J. The sustainable development strategy of the German hard coal mining industry. In Proceedings of the 7th Sustainable Development in the Minerals Industry Conference (SDIMI), University of British Columbia, Vancouver, BC, Canada, 13 July 2015. [Google Scholar]
- Kratzsch, H. Bergschadenkunde. 4. Auflage; Deutscher Markscheider-Verein e.V.: Bochum, Germany, 2005; p. 894. [Google Scholar]
- Keinhorst, H. Die Berechnung der Bodensenkungen im Emschergebiet, Festschrift 25 Jahre Emschergenossenschaft; Emschergenossenschaf: Essen, Germany, 1925. [Google Scholar]
- Bals, R. Beitrag zur Frage der Vorausberechnung bergbaulicher Senkungen. Mitteilungen Aus Dem Marks. 1931, 42/43, 98–111. [Google Scholar]
- Lehmann, K.; Neubert, K.; Schafstein, K. Berechnung und Darstellung von Bodenbewegungen über Abbauen. Mitteilungen Aus Dem Marks. 1942, 53. [Google Scholar]
- Awershin, S.G. Сдвижение Гoрных Пoрoд при Пoдземных Разрабoтках; Ugletekhizdat: Moscow, Russia, 1947; p. 245. [Google Scholar]
- Sann, B. Betrachtungen zur Vorausberechnung von Bodensenkungen infolge Kohenabbaus. Bergbau-Rundschau 1949, 163–167. [Google Scholar]
- Knothe, S. Równanie profilu ostatecznie wykształconej niecki osiadania. Arch. Górnictwa I Hut. 1953, 1, 22–38. [Google Scholar]
- Litwiszyn, J. Statistical methods in the mechanics of granular bodies. Rheol. Acta 1958, 1, 146–150. [Google Scholar] [CrossRef]
- Berry, D.S. Ground movement considered as an elastic phenomenon. Min. Engr. 1963, 123, 28–41. [Google Scholar]
- Sashurin, A.D. Сдвижение Гoрных Пoрoд на Рудниках Чернoй Металлургии; IGD Ural: Yekaterinburg, Russia, 1999; p. 262. [Google Scholar]
- Busch, W.; Yin, X.; Coldewey, W.G.; Hejmanowski, R. Bergwerk Ost der RAG G. In Analyse von Senkungserscheinungen Außerhalb des Prognostizierten Einwirkungsbereiches; Gutachten im Auftrag der Bezirksregierung Arnsberg; Institut für Geotechnik und Markscheidewesen, TU Clausthal: Clausthal-Zellerfeld, Germany, 2017. [Google Scholar]
- Busch, W.; Walter, D.; Yin, X.; Coldewey, W.G.; Hejmanowski, R. Bergwerk Lippe der RAG AG. In Analyse von Senkungserscheinungen Außerhalb des Prognostizierten Einwirkungsbereiches; Gutachten im Auftrag der Bezirksregierung Arnsberg; Institut für Geotechnik und Markscheidewesen. TU Clausthal: Clausthal-Zellerfeld, Germany, 2017. [Google Scholar]
- Busch, W.; Walter, D.; Coldewey, W.G.; Hejmanowski, R. Bergwerk Lohberg/Osterfeld der RAG G. In Analyse von Senkungserscheinungen außerhalb des Prognostizierten Einwirkungsbereiches; Gutachten im Auftrag der Bezirksregierung Arnsberg; Institut für Geotechnik und Markscheidewesen, TU Clausthal: Clausthal-Zellerfeld, Germany, 2017. [Google Scholar]
- Suchowerska Iwaniec, A.M.; Carter, J.P.; Hambleton, J.P. Geomechanics of subsidence above single and multi-seam coal mining. J. Rock Mech. Geotech. Eng. 2016, 8, 304–313. [Google Scholar] [CrossRef]
- Xia, K.; Chen, C.; Liu, X.; Fu, H.; Pan, Y.; Deng, Y. Mining-induced ground movement in tectonic stress metal mines:a case study. Bull. Eng. Geol. Environ. 2016, 75, 1089–1115. [Google Scholar] [CrossRef]
- Xia, K.-z.; Chen, C.-x.; Liu, X.-m.; Zheng, Y.; Fu, H. Ground movement mechanism in tectonic stress metal mineswith steep structure planes. J. Cent. South Univ. 2017, 24, 2092–2104. [Google Scholar] [CrossRef]
- Pawlik, M.; Rudolph, T.; Bernsdorf, B.; Goerke-Mallet, P.; Hegemann, M.; Gellendin, M. Digital Twin—Integrated Geomonitoring. Min. Rep. Glückauf 2023, 159, 133–145. [Google Scholar]
- Melchers, C.; Westermann, S.; Reker, B. Evaluation of Mine Water Rebound Processes, Project Report; Selbstverlag Deutsches Bergbau Museum: Bochum, Germany, 2020; pp. 1–132. [Google Scholar]
- Westermann, S.; Dogan, T.; Reker, B.; Goerke-Mallet, P.; Wolkersdorfer, C.; Melchers, C. Evaluation of mine water rebound processes in European Coal Mine Districts to enhance the understanding of hydraulic, hydrochemical and geomechanical processes. In Proceedings of IMWA 2017—Mine Water & Circular Ecomomy, Lappeenranta, Finland, 25–30 June 2017. [Google Scholar]
- Goerke-Mallet, P.; Busch, W.; Müterthies, A.; Melchers, C. Copernicus for Mining—Über den Einsatz von Sentinel-Daten im Nachbergbau. BHM Berg-Und Hüttenmännische Monatshefte 2017, 162, 427–429. [Google Scholar] [CrossRef]
- Rzętała, M. Zróżnicowanie Występowania Sztucznych Zbiorników Wodnych na Obszarze Wyżyny Katowickiej. Geographia. Studia et Dissertationes; Prace Naukowe Uniwersytetu Śląskiego: Katowice, Poland, 1998; Volume 22, pp. 53–67. [Google Scholar]
- EGMS. Available online: https://land.copernicus.eu/pan-european/european-ground-motion-service (accessed on 23 February 2024).
- Devleeschouwer, X.; Declercq, P.Y.; Flamion, B.; Brixko, J.; Timmermans, A.; Vanneste, J. Uplift revealed by radar interferometry around Liège (Belgium): A relation with rising mining groundwater. In Proceedings of Post-Mining, Nancy, France, 6–8 February 2008. [Google Scholar]
- Vervoort, A.; Declercq, P.Y. Surface movement above old coal longwalls after mine closure. Int. J. Min. Sci. Technol. 2017, 27, 481–490. [Google Scholar] [CrossRef]
- Bell, F.G.; Donnelly, L.J.; Genske, D.D.; Ojeda, J. Unusual cases of mining subsidence from Great Britain, Germany and Colombia. Environ. Geol. 2005, 47, 620–631. [Google Scholar] [CrossRef]
- Jinhai, Z.; Ning, J.; Liming, Y.; Liyang, B. The effects of mining subsidence and drainage improvements on a waterlogged area. Bull. Eng. Geol. Environ. 2019, 78, 3815–3831. [Google Scholar] [CrossRef]
- Chen, Y.; Hu, Z.; Li, P.; Li, G.; Yuan, D.; Guo, J. Assessment and Effect of Mining Subsidence on Farmland in Coal–Crop Overlapped Areas: A Case of Shandong Province, China. Agriculture 2022, 12, 1235. [Google Scholar] [CrossRef]
- Yilmaz, I.; Marschalko, M. A leaning historical monument formed by underground mining effect: An example from Czech Republic. Eng. Geol. 2012, 133–134, 43–48. [Google Scholar] [CrossRef]
- Bell, F.G.; Stacey, T.R.; Genske, D.D. Mining subsidence and its effect on the environment: Some differing example. Environ. Geol. 2000, 40, 135–152. [Google Scholar] [CrossRef]
- Cuenca, M.C.; Hooper, A.J.; Hanssen, R.F. Surface deformation induced by water influx in the abandoned coal mines in Limburg, The Netherlands observed by satellite radar interferometry. J. Appl. Geophys. 2013, 88, 1–11. [Google Scholar] [CrossRef]
- Busch, W.; Coldewey, W.G.; Walter, D.; Wesche, D.; Tielmann, I. Analyse von Senkungserscheinungen Außerhalb Prognostizierter Bergbaulicher Einwirkungsbereiche des Bergwerks Prosper-Haniel, Gutachten der TU Clausthal und der WWU Münster vom 31.08.2012 im Auftrag der Bezirksregierung Arnsberg (Abt.6); TU Clausthal: Clausthal-Zellerfeld, Germany, 2012. [Google Scholar]
- Melchers, C.; Goerke-Mallet, P.; Kleineberg, K. Elements and Aspects of the Post-Mining Era. Min. Rep. Glückauf 2016, 152, 215–223. [Google Scholar]
- Harnischmacher, S. Quantification of mining subsidence in the Ruhr District (Germany). Géomorphologie Relief Process. Environ. 2010, 3, 261–274. [Google Scholar] [CrossRef]
- Białek, J.; Mielimąka, R.; Czerwińska-Lubczyk, A. Górnictwo perspektywy i zagrożenia. In BHP Oraz Ochrona i Rekultywacja Powierzchni; Wydawnictwo P.A.nova: Gliwice, Poland, 2014; p. 271. [Google Scholar]
- Kowalski, A. Deformacje powierzchni w Górnośląskim Zagłębiu Węglowym; Monografia; Wydawnictwo Głównego Instytutu Górnictwa: Katowice, Poland, 2015; p. 283. [Google Scholar]
- Kowalski, A. Deformacje Powierzchni na Terenach Górniczych Kopalni Węgla Kamiennego; Wydawnictwo Głównego Instytutu Górnictwa: Katowice, Poland, 2020; p. 300. [Google Scholar]
- Gholizadeh, A.; Saberioon, M.; Ben-Dor, E.; Borůvka, L. Monitoring of Selected Soil Contaminants using Proximal and Remote Sensing Techniques: Background, State-of-the-Art and Future Perspectives. Crit. Rev. Environ. Sci. Technol. 2018, 48, 243–278. [Google Scholar] [CrossRef]
- Gong, C.; Lei, S.; Bian, Z.; Liu, Y.; Zhang, Z.; Cheng, W. Analysis of the Development of an Erosion Gully in an Open-Pit Coal Mine Dump During a Winter Freeze-Thaw Cycle by Using Low-Cost UAVs. Remote Sens. 2019, 11, 1356. [Google Scholar] [CrossRef]
- Carabassa, V.; Montero, P.; Alcañiz, J.M.; Padró, J.-C. Soil Erosion Monitoring in Quarry Restoration Using Drones. Minerals 2021, 11, 949. [Google Scholar] [CrossRef]
- Mi, J.; Yang, Y.; Hou, H.; Zhang, S.; Ding, Z.; Hua, Y. Impacts of Ground Fissures on Soil Properties in an Underground Mining Area on the Loess Plateau, China. Land 2022, 11, 162. [Google Scholar] [CrossRef]
- Bernsdorf, B.; Rudolph, T.; Pawlik, M.; Bökelmann, S. Multisensorales Geomonitoring—Ein Beitrag zur Datenfusion im Nachbergbau = Multi-Sensoral Geomonitoring—A Contribution on Data Fusion in Post-Mining. gis.Science 2023, 1, 1–16. [Google Scholar]
- Flores, H.; Lorenz, S.; Jackisch, R.; Tusa, L.; Contreras, I.C.; Zimmermann, R.; Gloaguen, R. Uas-based hyperspectral environmental monitoring of acid mine drainage affected waters. Minerals 2021, 11, 182. [Google Scholar] [CrossRef]
- Pawlik, M.; Gellendin, M.; Bernsdorf, B.; Rudolph, T.; Benndorf, J. Digital-Twin—How to Observe Changes and Trends on the Post-Mining Areas? Int. J. Earth Environ. Sci. 2022, 7, 195. [Google Scholar] [CrossRef]
- Rudolph, T.; Yin, X.; Goerke-Mallet, P. Umfassende Definition des Geo- und Umweltmonitoring aus den nachbergbaulichen Erfahrungen im Ruhrgebiet. Z. Der Dtsch. Ges. Für Geowiss. 2023, 173, 513–531. [Google Scholar] [CrossRef]
- Erdelj, M.; Natalizio, E. UAV-assisted disaster management: Applications and open issues. In Proceedings of 2016 Intertional Conference on Computing, Networking and Communications (ICNC), Kauai, HI, USA, 15–18 February 2016. [Google Scholar] [CrossRef]
- Xu, J.; Ota, K.; Dong, M. LUNA: Lightweight UAV navigation based on airborne vision for disaster management. In Proceedings of International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Atlanta, GA, USA, 14–17 July 2019. [Google Scholar] [CrossRef]
- Yuan, G.; Wang, Y.; Zhao, F.; Wang, T.; Zhang, L.; Hao, M.; Yan, S.; Dang, L.; Peng, B. Accuracy assessment and scale effect investigation of UAV thermography for underground coal fire surface temperature monitoring. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102426. [Google Scholar] [CrossRef]
- Bouguettaya, A.; Zarzour, H.; Taberkit, A.M.; Kechida, A. A review on early wildfire detection from unmanned aerial vehicles using deep learning-based computer vision algorithms. Signal Process. 2022, 190, 108309. [Google Scholar] [CrossRef]
- Prosekov, A.Y.; Rada, A.O.; Kuznetsov, A.D.; Timofeev, A.E.; Osintseva, M.A. Environmental monitoring of endogenous fires based on thermal imaging and 3D mapping from an unmanned aerial vehicle. IOP Conf. Ser. Earth Environ. Sci. 2022, 981, 4201. [Google Scholar] [CrossRef]
- Bernsdorf, B.; Formaniuk, A.; Rudolph, T. Possibilities of a method for copter-supported gas leak detection with thermal imaging cameras in industry and hazard prevention. Oil Gas Eur. Mag. 2020, 4, 12–20. [Google Scholar] [CrossRef]
- Mader, S.; Yang, C.-H.; Müterthies, A.; Teuwsen, S.; Formaniuk, A.; Rudolph, T.; Haske, B.; Bernsdorf, B. Sicherheit von gastechnischen Anlagen—Das KaMonSys-Projekt. Teil 2: Bildverarbeitungsansätze für eine mehrstufige Gasdetektion mittels Satelliten- und Kopter-Lösungen. Erdoel Erdgas Kohle EKEP 2021, 137, 23–29. [Google Scholar]
- Rudolph, T.; Haske, B.; Bernsdorf, B.; Müterthies, A.; Teuwsen, S.; Formaniuk, A.; Mader, S. Das Projekt KaMonSys–Sicherheit in gastechnischen Anlagen: Teil 1: Grundlagen—3D-GIS und Flugplanung für autonome Roboterflüge in gastechnischen Anlagen. Erdoel Erdgas Kohle EKEP 2021, 137, 26–33. [Google Scholar]
- Haske, B.; Rudolph, T.; Bernsdorf, B.; Benndorf, J. Sustainability in Energy Storage—How Modern Geoscience Concepts can Improve Underground Storage Monitoring. Int. J. Earth Environ. Sci. 2022, 7, 199. [Google Scholar]
- Haske, B.; Tiganj, J.; Bernsdorf, B.; Rudolph, T. The use of UAVs in supporting the preservation of the industrial and mining heritage in the Ruhr area. IOP Conf. Ser. Earth Environ. Sci. 2023, 1189, 12024. [Google Scholar] [CrossRef]
- Pawlik, M.; Haske, B.; Bernsdorf, B.; Rudolph, T.; Benndorf, J. Analyse des Zustands der Vegetation auf dem Gelände des stillgelegten Bergwerks ProsperHaniel anhand von multispektralen Satellitenbildern der Sentinel-2 Mission und Drohnenflüge. Markscheidewesen 2022, 129, 37–44. [Google Scholar]
- Böse, C.; Farrenkopf, M.; Weindl, A. Kohle-Koks-Öl, Die Geschichte des Bergwerk Prosper-Haniel; Aschendorff Verlag: Münster, Germany, 2018. [Google Scholar]
- RAG Stiftung—Bürgerinformationsdienst (BID). Available online: https://geodaten.rag.de/mapapps/resources/apps/bid/index.html?lang=de (accessed on 23 February 2024).
- Pawlik, M.; Rudolph, T.; Bernsdorf, B. Analysis of changes of the vegetation condition on the area of the closed Prosper-Haniel mine in 1984-2021 using multispectral satellite images. IOP Conf. Ser. Earth Environ. Sci. 2023, 1189, 12022. [Google Scholar] [CrossRef]
- DJI Phantom 4 Multispectral. Available online: https://www.dji.com/de/p4-multispectral/specs (accessed on 26 February 2024).
- LBA- Luftfahrt Bundesamt. Available online: https://www.lba.de/DE/Drohnen/Drohnen_node.html (accessed on 23 February 2024).
- Luftverkehrs-Ordnung (LuftVO). Available online: https://www.buzer.de/gesetz/11757/index.htm (accessed on 23 February 2024).
- COMMISSION IMPLEMENTING REGULATION (EU). 2019/947 of 24 May 2019 on the Rules and Procedures for the Operation of Unmanned Aircraft. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/HTML/?uri=CELEX:32019R0947 (accessed on 9 April 2024).
- Kersten, T.P.; Lindstaedt, M. Photogrammetrie auf Knopfdruck—Auswertung und Resultate UAV-gestützter Bildflugdaten. Zfv Z. Für Geodäsie Geoinf. Und Landmanag. 2017, 142, 3–13. [Google Scholar] [CrossRef]
- DJI Mavic 2 Enterprise Advance. Available online: https://enterprise.dji.com/de/mavic-2-enterprise-advanced (accessed on 13 February 2024).
- EASA-Unmanned Aircraft Systems Regulations. Available online: https://www.easa.europa.eu/en/documentlibrary/easy-access-rules/easy-access-rules-unmanned-aircraft-systems-regulations-eu (accessed on 23 February 2024).
- BMDV–EU Regelungen für Drohnen. Available online: https://bmdv.bund.de/SharedDocs/DE/Artikel/LF/drohnen.html (accessed on 23 February 2024).
- NOTAM Info. Available online: https://www.notaminfo.com/ (accessed on 23 February 2024).
- UAV Forecast. Available online: https://www.uavforecast.com (accessed on 23 February 2024).
- Eling, C.; Münstermann, G. Direkte Georeferenzierung von Bildverbänden: Zum Leistungsstand von UAV Systemen mit integrierten RTK-Modulen. In UAV 2020—The Sky is the Limit; Przybilla, H.-J., Kersten, T.J., Eds.; DVW-Schriftenreihe Band 97 Wißner-Verlag: Augsburg, Germany, 2020; pp. 77–90. [Google Scholar]
- Wanninger, L. Introduction to Network RTK. 2008. Available online: http://www.wasoft.de/e/iagwg451/intro/introduction.html (accessed on 23 February 2024).
- Kersten, T.; Lindstaedt, M. UAV-basierte Bildflüge mit RTK-GNSS—Brauchen wir da noch Passpunkte. In UAV 2022—Innovation und Praxis; Wasmeier, P., Ed.; DVW Schriftenreihe Band 100 Wißner-Verlag: Augsburg, Germany, 2022; pp. 39–58. [Google Scholar]
- SAPOS. Available online: https://www.bezreg-koeln.nrw.de/geobasis-nrw/produkte-unddienste/raumbezug/satellitenpositionierungsdienst-sapos (accessed on 23 February 2024).
- Mobilfunk Monitoring Karte. Available online: https://gigabitgrundbuch.bund.de/GIGA/DE/MobilfunkMonitoring/Vollbild/start.html (accessed on 23 February 2024).
- EASA—How High Can I Fly My Drone? Available online: https://www.easa.europa.eu/en/faq/116465 (accessed on 23 February 2024).
- UAV Mapping Guidelines—7. Preparing UAV Mission. Available online: https://uav-guidelines.openaerialmap.org/pages/07-preparing-for-the-uav-mission/ (accessed on 23 February 2024).
- Toffanin, P. OpenDroneMap: The Missing Guide: A Practical Guide to Drone Mapping Using Free and Open Source Software; MasseranoLabs LLC: Belleair Bluffs, FL, USA, 2019; p. 264. [Google Scholar]
- Agisoft. Available online: https://agisoft.freshdesk.com/support/solutions/articles/31000159853-dji-phantom-4-multispectral-data-processing#Calibrate-Reflectance (accessed on 23 February 2024).
- Micasense. Available online: https://support.micasense.com/hc/en-us/articles/115000765514-Use-of-Calibrated-Reflectance-Panels-For-MicaSense-Data (accessed on 23 February 2024).
- Vapnik, V.N. An overview of statistical learning theory. IEEE Trans. Neural Netw. 1999, 10, 988–999. [Google Scholar] [CrossRef] [PubMed]
- Cortes, C.; Vapnik, V.N. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring the Vernal Advancement and Retrogradation (Green Wave Effect) of Natural Vegetation. RSC-1978-4, 1 November 1974.
- Kuechly, H.U.; Cozacu, A.; Kodl, G.; Nicolai, C.; Vallentin, C. Grundlagen der Fernerkundung; Inforeihe SAPIENS: Satellitendaten für Planung, Industrie, Energiewirtschaft und Naturschutz; Deutsches GeoForschungsZentrum GFZ: Potsdam, Germany, 2020. [Google Scholar]
- Pawlik, M.; Haske, B.; Flores, H.; Jaeckel, J.; Bernsdorf, B.; Rudolph, T. The use of drone flights to observe the post-mining processes on the example Weihnacht and Pfingst lakes. In Proceedings of the XXIII Conference of PhD Students and Young Scientists, Wroclaw, Poland, 15 June 2023. [Google Scholar]
- Westermann, S.; Goerke-Mallet, P.; Reker, B.; Dogan, T.; Wolkersdorfer, C.; Melchers, C. Aus Erfahrungen lernen: Evaluierung von Grubenwasseranstiegsprozessen zur Verbesserung zukünftiger Prognosen. In Proceedings of the 17. Altbergbau-Kolloquium, Freiberg, Germany, 16–18 November 2017. [Google Scholar]
- Sedano-Cibrián, J.; Pérez-Álvarez, R.; de Luis-Ruiz, J.M.; Pereda-García, R.; Salas-Menocal, B.R. Thermal Water Prospection with UAV, Low-Cost Sensors and GIS. Application to the Case of La Hermida. Sensors 2022, 22, 6756. [Google Scholar] [CrossRef] [PubMed]
- Koparan, C.; Koc, A.B.; Privette, C.V.; Sawyer, C.B. In Situ Water Quality Measurements Using an Unmanned Aerial Vehicle (UAV) System. Water 2018, 10, 264. [Google Scholar] [CrossRef]
- Koparan, C.; Koc, A.B.; Privette, C.V.; Sawyer, C.B.; Sharp, J.L. Evaluation of a UAV-Assisted Autonomous Water Sampling. Water 2018, 10, 655. [Google Scholar] [CrossRef]
- Iezzi, F.; Todisco, M.T. Stream temperature estimated in situ from thermal-infrared images: Best estimate and uncertainty. J. Phys. Conf. Ser. 2015, 655, 12063. [Google Scholar] [CrossRef]
- Tomaštík, J.; Mokroš, M.; Saloš, S.; Chudỳ, F.; Tunák, D. Accuracy of Photogrammetric UAV-Based Point Clouds under Conditions of Partially-Open Forest Canopy. Forests 2017, 8, 151. [Google Scholar] [CrossRef]
- Jaroszewski, M.; Socha, D.; Wozniak, C. Zastosowanie metody zdjęć termowizyjnych w monitoringu termicznym zbiorników wodnych. Aura 2005, 12, 7–9. [Google Scholar]
- Langhammer, J.; Lendzioch, T.; Šolc, J. Use of UAV Monitoring to Identify Factors Limiting the Sustainability of Stream Restoration Projects. Hydrology 2023, 10, 48. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spectral Bands | Wavelength (nm) |
|---|---|
| Blue | 434–466 |
| Green | 544–576 |
| Red | 634–666 |
| Red-Edge | 714–746 |
| Near-Infrared | 814–866 |
| Drone Flight Parameters | Description | References |
|---|---|---|
| Altitude of flight | The maximum flight height is 120 m above the earth’s surface. It depends on whether the National Aviation Authority imposes a geographical zone with a lower limit in the area where you are flying. | [76] |
| Frontal and Side overlap | “The amount of overlap between frames in the forward and lateral direction from the perspective of the platform’s direction of movement—must be properly handled to create seamless mosaics that represent the location of the features in the image. To produce accurate terrain models, a minimum forward overlap of 80 percent and a minimum side overlap of 75 percent are recommended to maximize the number of observations of landscape features.” | [77] |
| Waypoints | Number of images taken. | |
| Estimated time | Time required to carry out a drone raid. The value is needed to estimate the number of inter-landings and take-offs. |
| Values of the NDVI | Land Cover Types | Color |
|---|---|---|
| <0.1 | Waters, soils, rocks, sand or snow | Red |
| 0.2 to 0.3 | Vegetation of low vitality | Yellow |
| 0.3 to 0.6 | Medium to dense vegetation cover | Light green |
| >0.6 | Very dense vegetation of high vitality | Dark green |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pawlik, M.; Haske, B.; Flores, H.; Bernsdorf, B.; Rudolph, T. Towards a Long-Term Unmanned Aerial Vehicle (UAV) Monitoring Framework for Post-Mining Effects: Prosper-Haniel Case. Mining 2024, 4, 211-229. https://doi.org/10.3390/mining4020013
Pawlik M, Haske B, Flores H, Bernsdorf B, Rudolph T. Towards a Long-Term Unmanned Aerial Vehicle (UAV) Monitoring Framework for Post-Mining Effects: Prosper-Haniel Case. Mining. 2024; 4(2):211-229. https://doi.org/10.3390/mining4020013
Chicago/Turabian StylePawlik, Marcin, Benjamin Haske, Hernan Flores, Bodo Bernsdorf, and Tobias Rudolph. 2024. "Towards a Long-Term Unmanned Aerial Vehicle (UAV) Monitoring Framework for Post-Mining Effects: Prosper-Haniel Case" Mining 4, no. 2: 211-229. https://doi.org/10.3390/mining4020013
APA StylePawlik, M., Haske, B., Flores, H., Bernsdorf, B., & Rudolph, T. (2024). Towards a Long-Term Unmanned Aerial Vehicle (UAV) Monitoring Framework for Post-Mining Effects: Prosper-Haniel Case. Mining, 4(2), 211-229. https://doi.org/10.3390/mining4020013