
Mine Productivity Upper Bounds and Truck Dispatch Rules

 ,
,
Abstract
:1. Introduction
2. Mine Model
2.1. Optimization Problem
Greedy Search
| Algorithm 1 Greedy search for mine productivity. |
 |
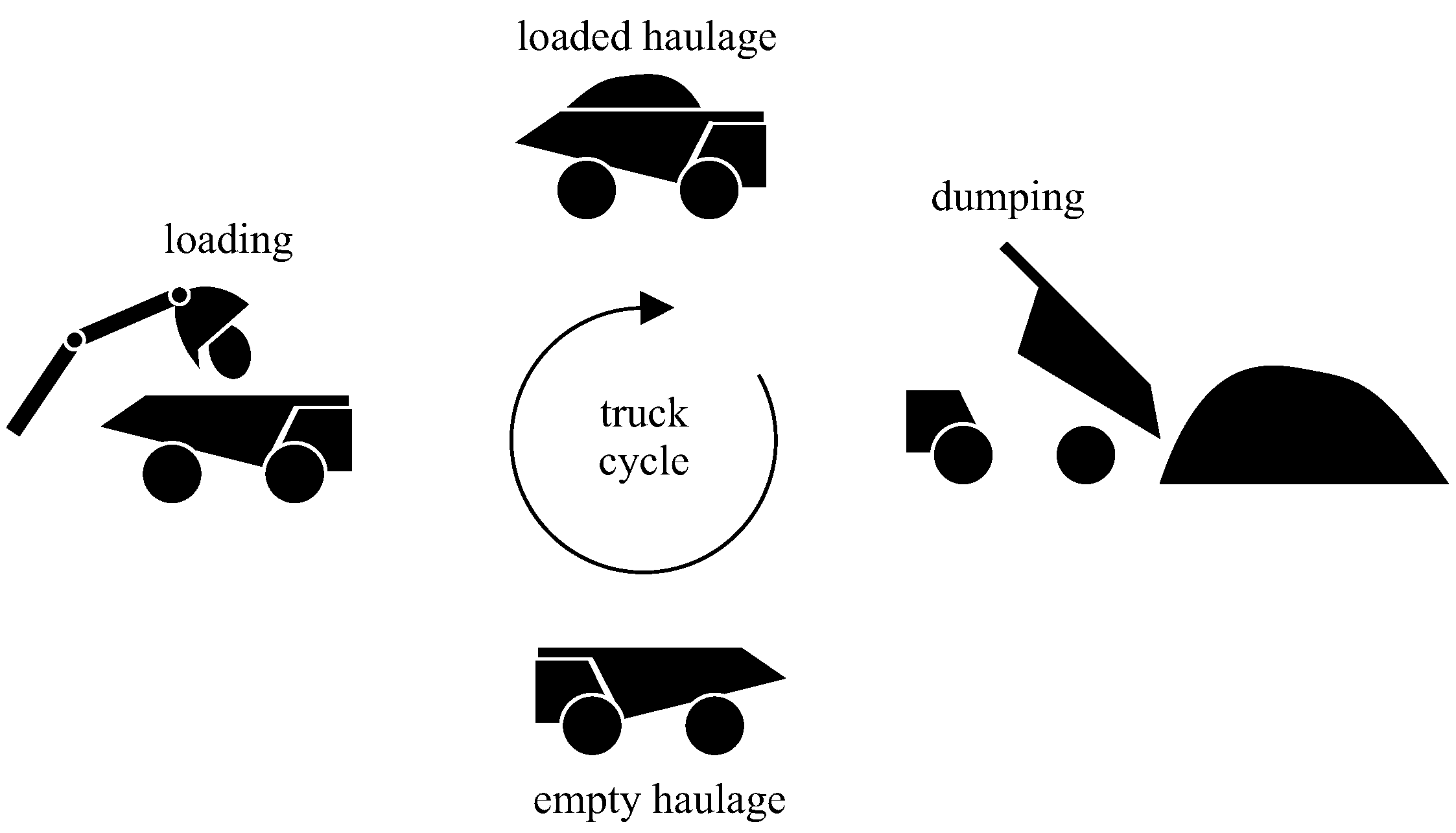
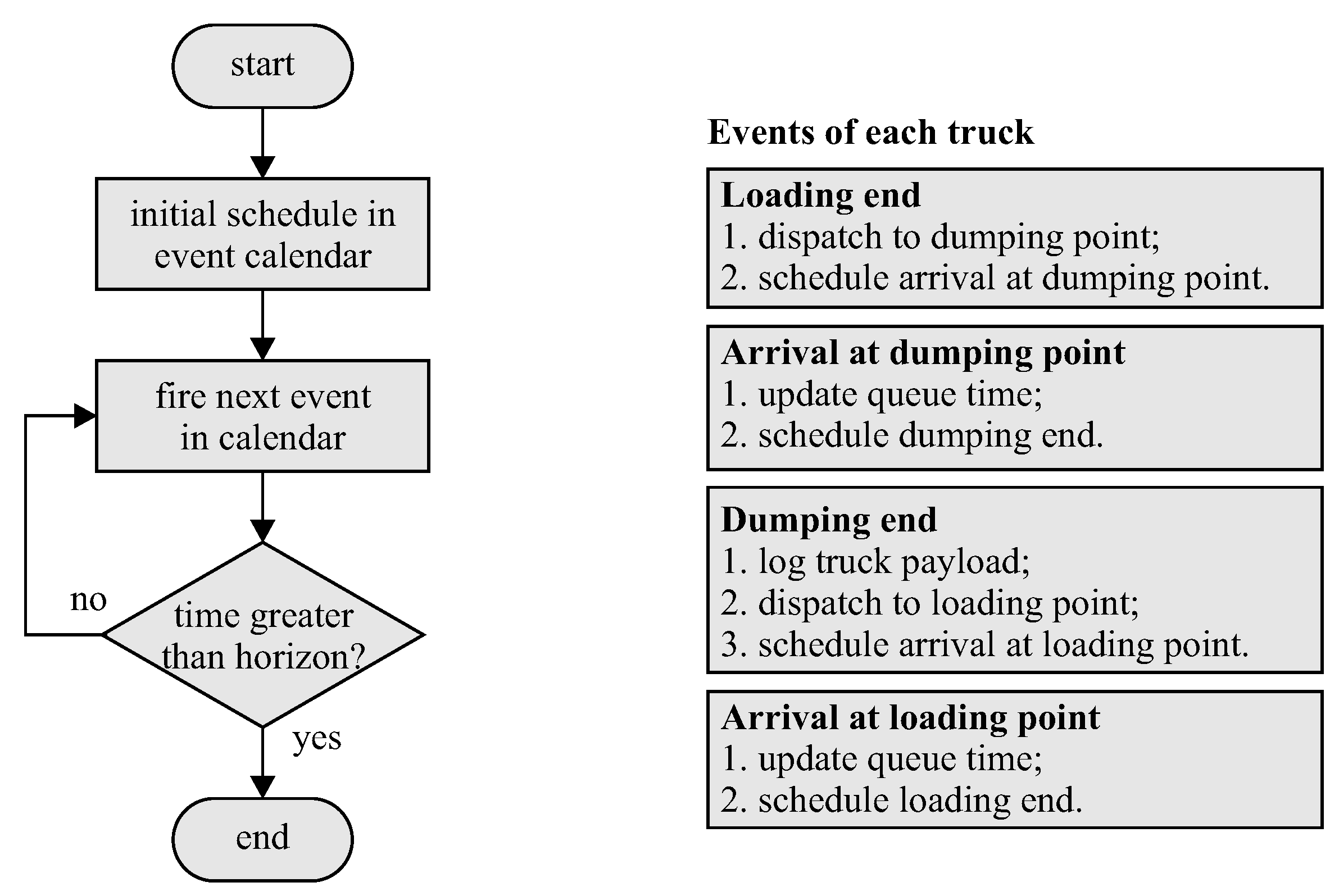
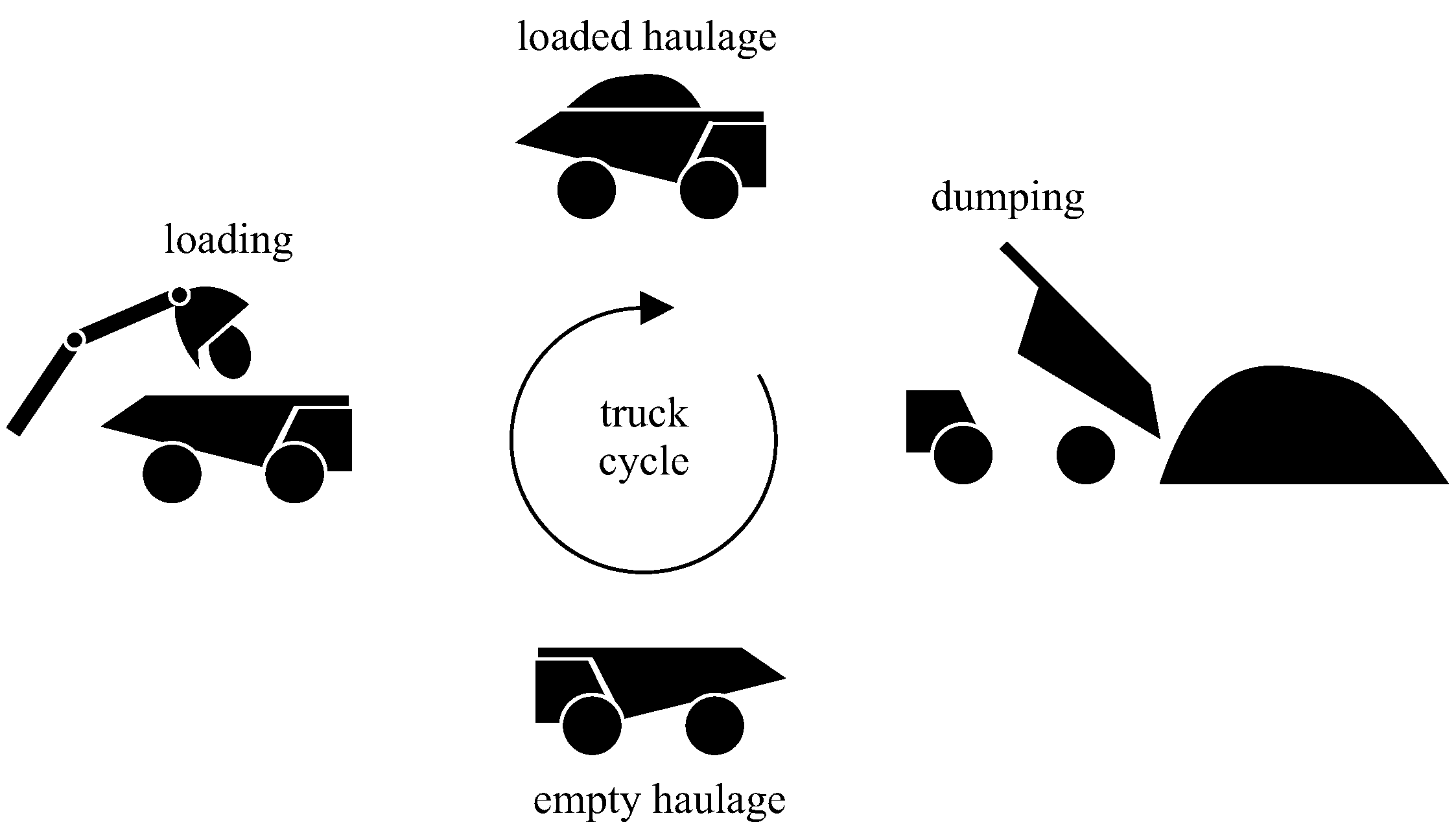
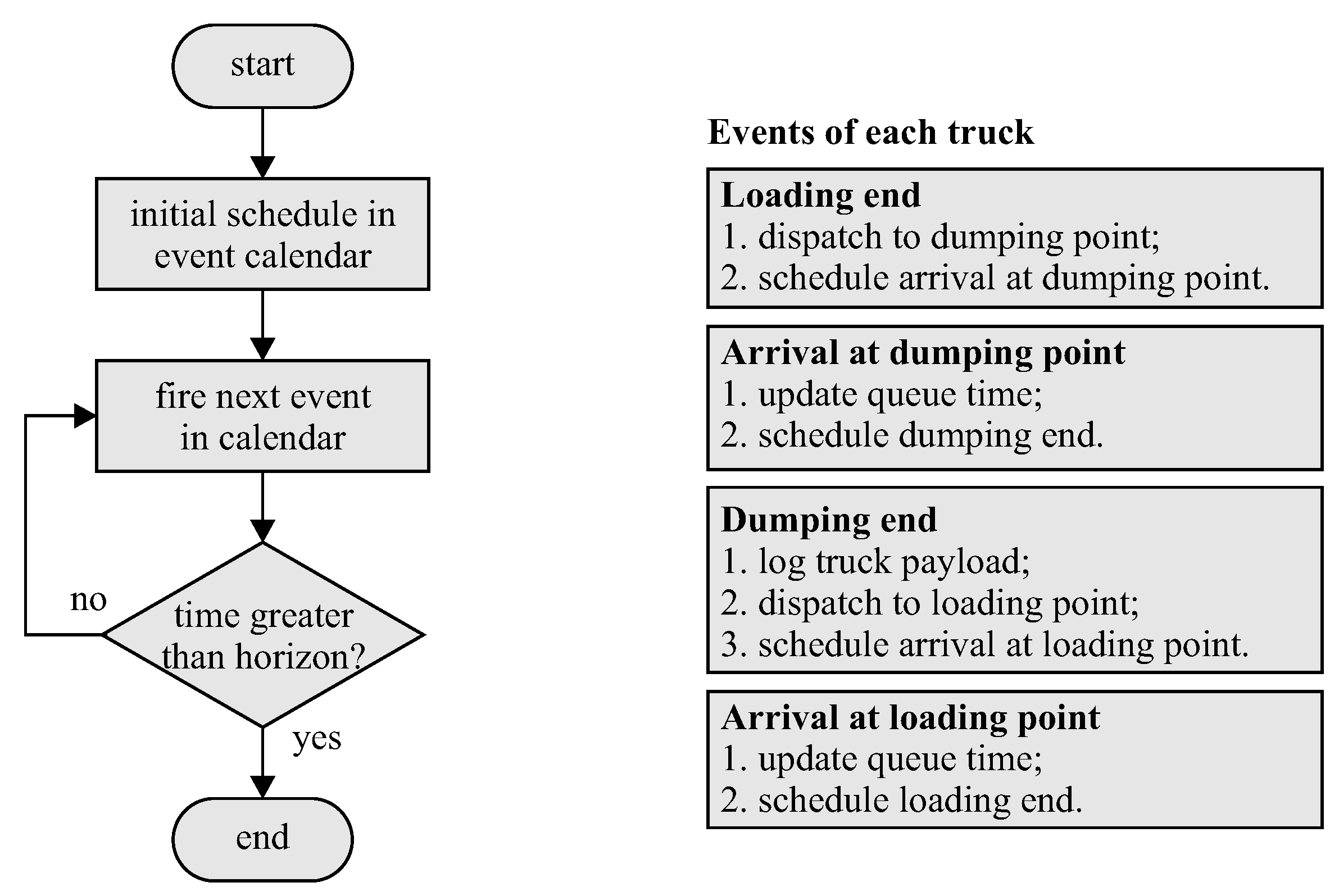
2.2. Simulation
Dispatch Rule
| Algorithm 2 Dispatch rule to a loading site. |
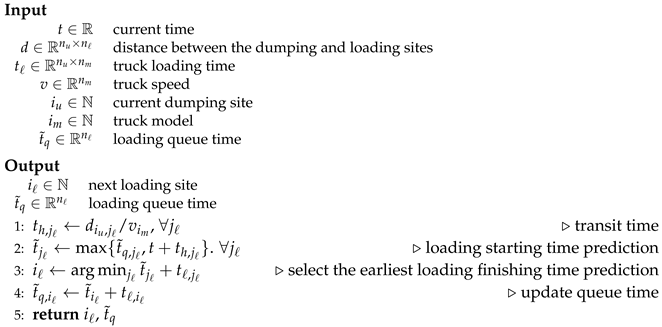 |
3. Results
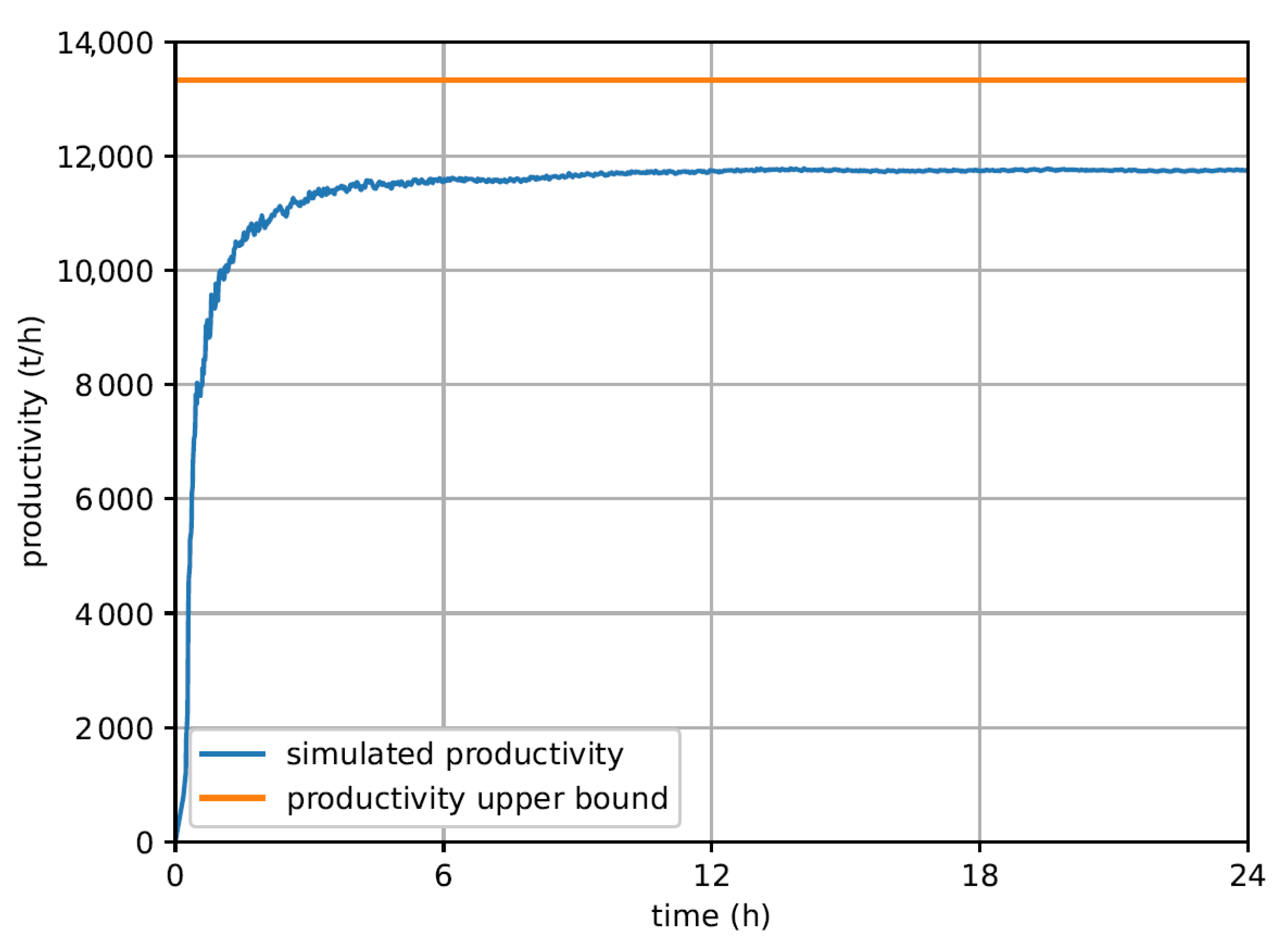
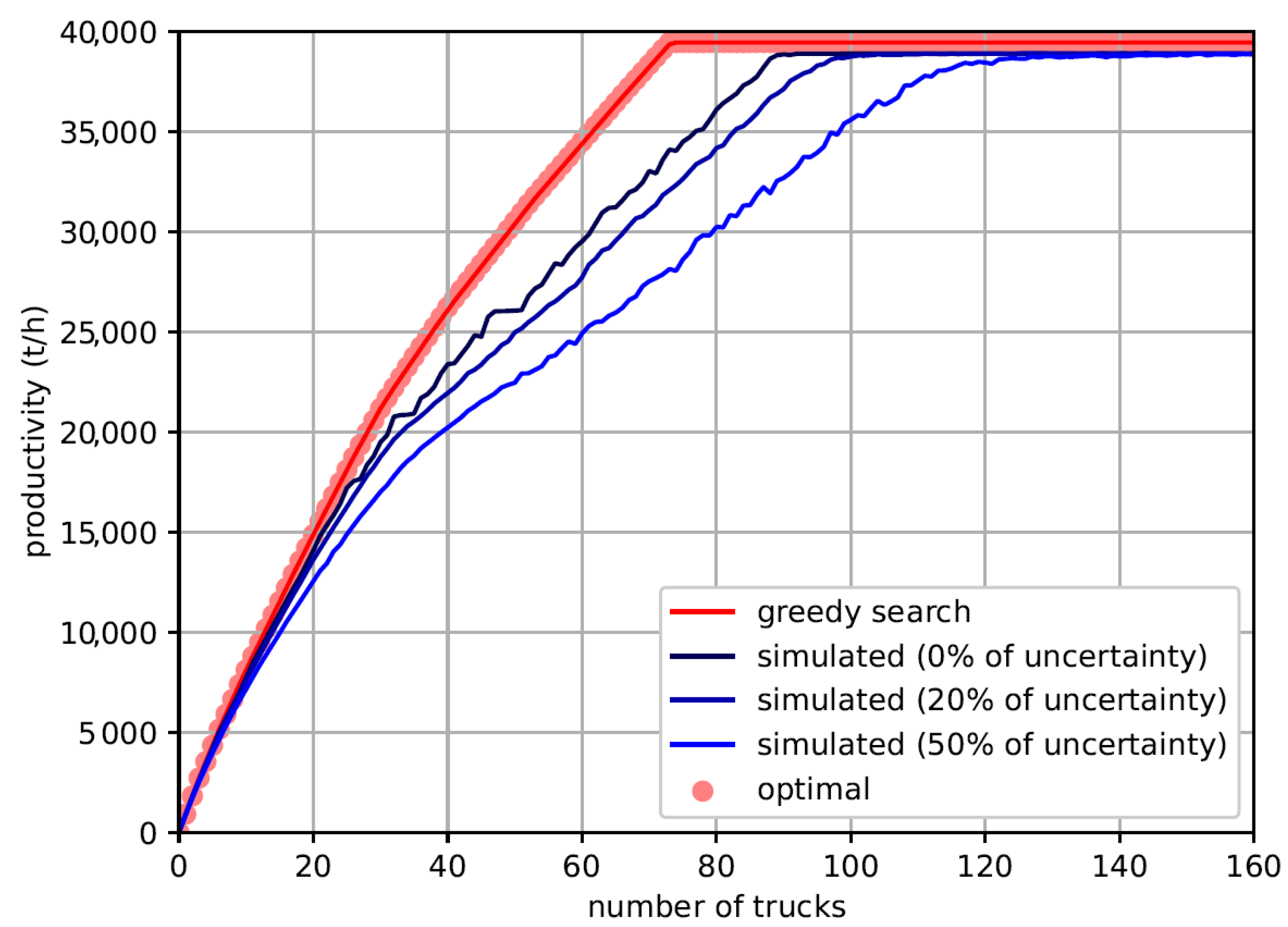
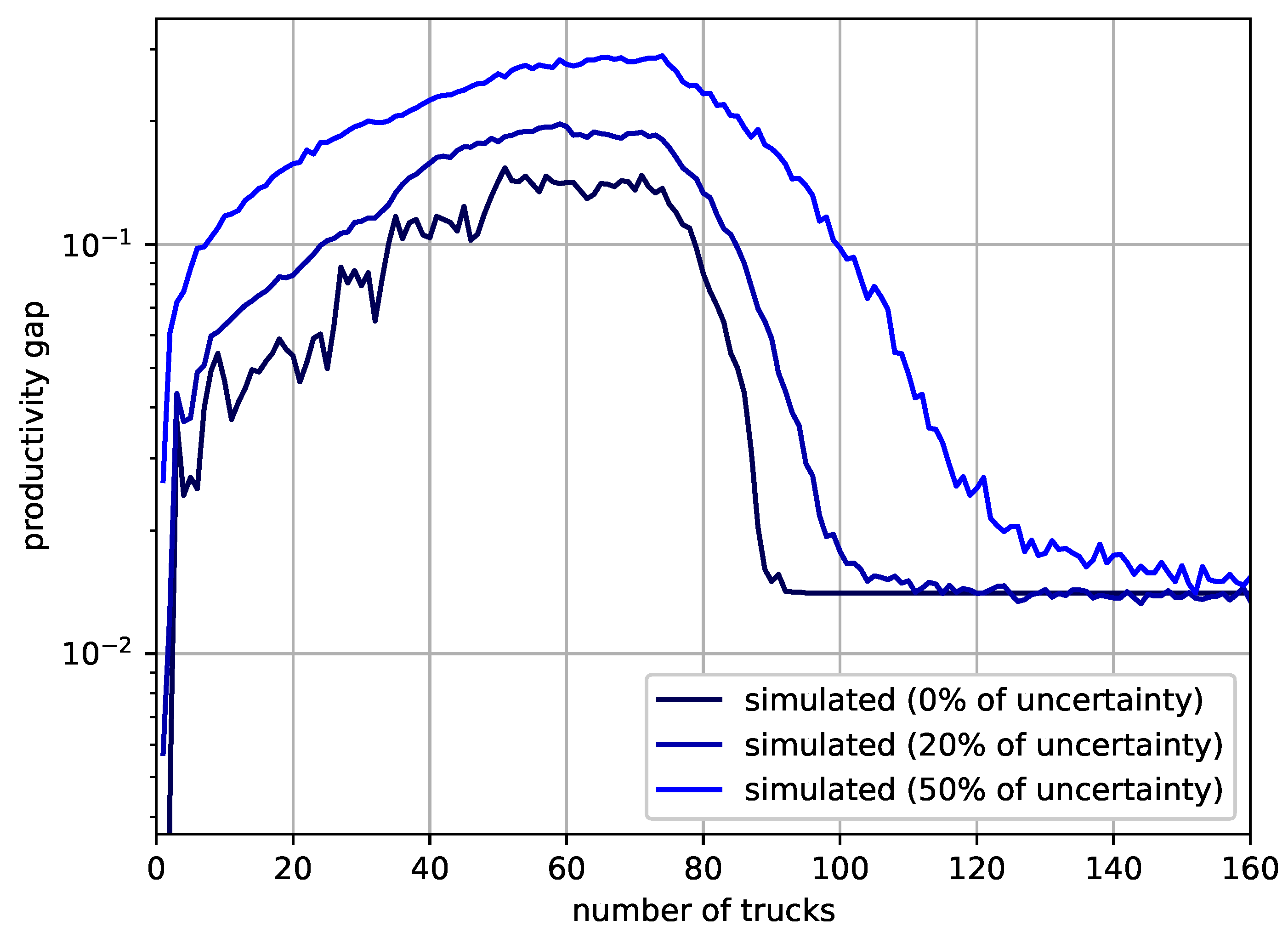
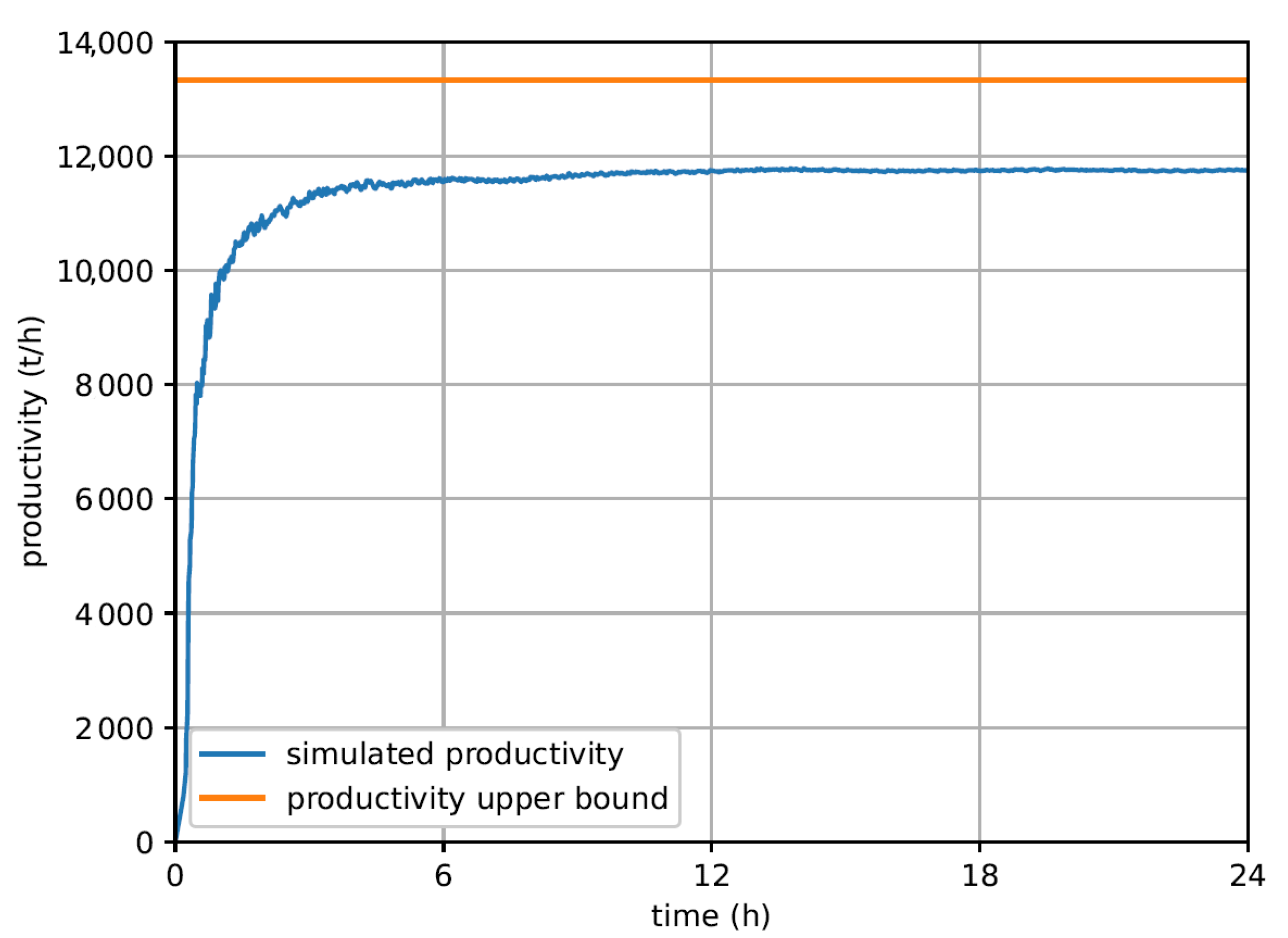
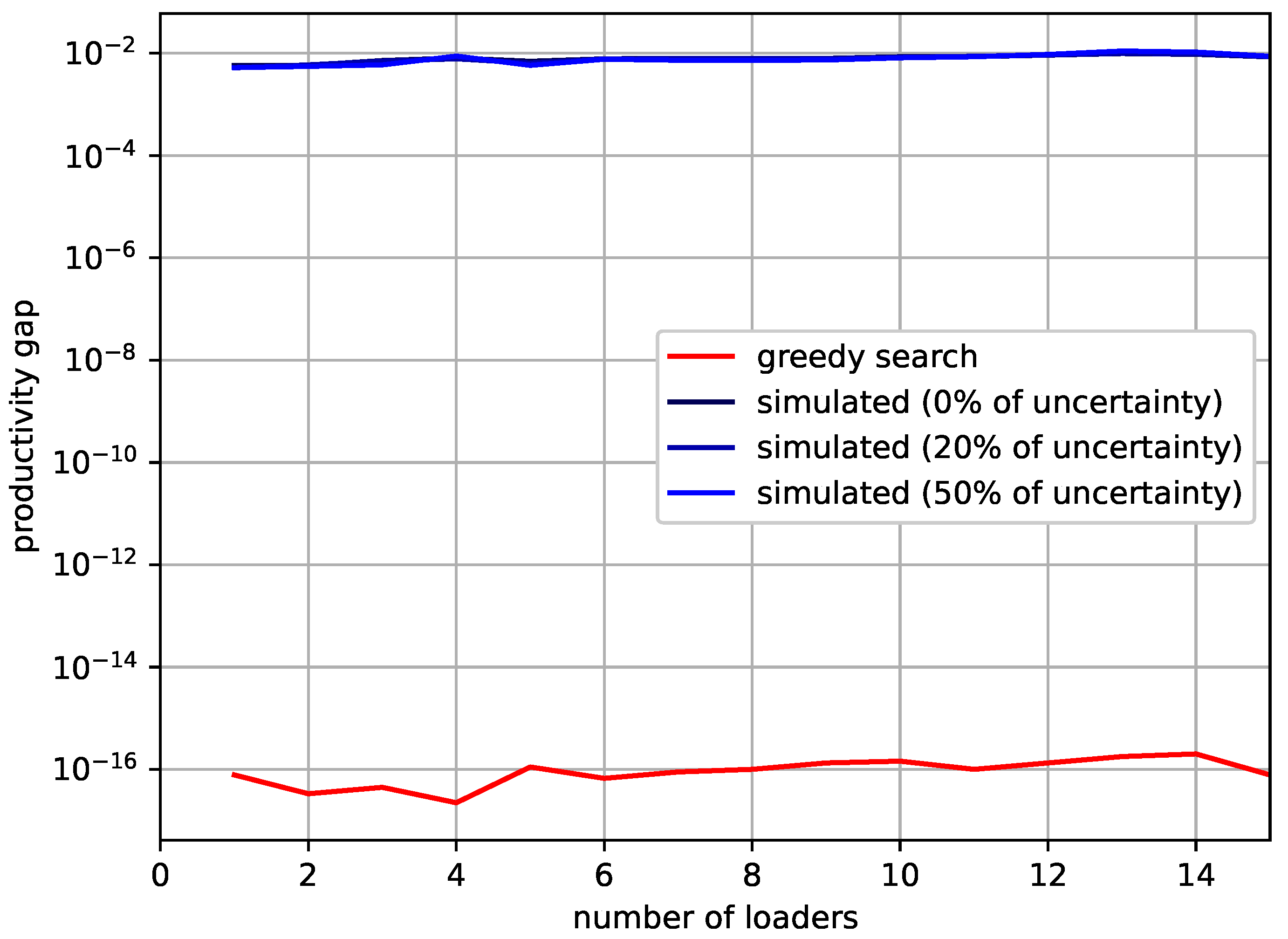
3.1. Simulated Productivity Convergence and Its Upper Bound
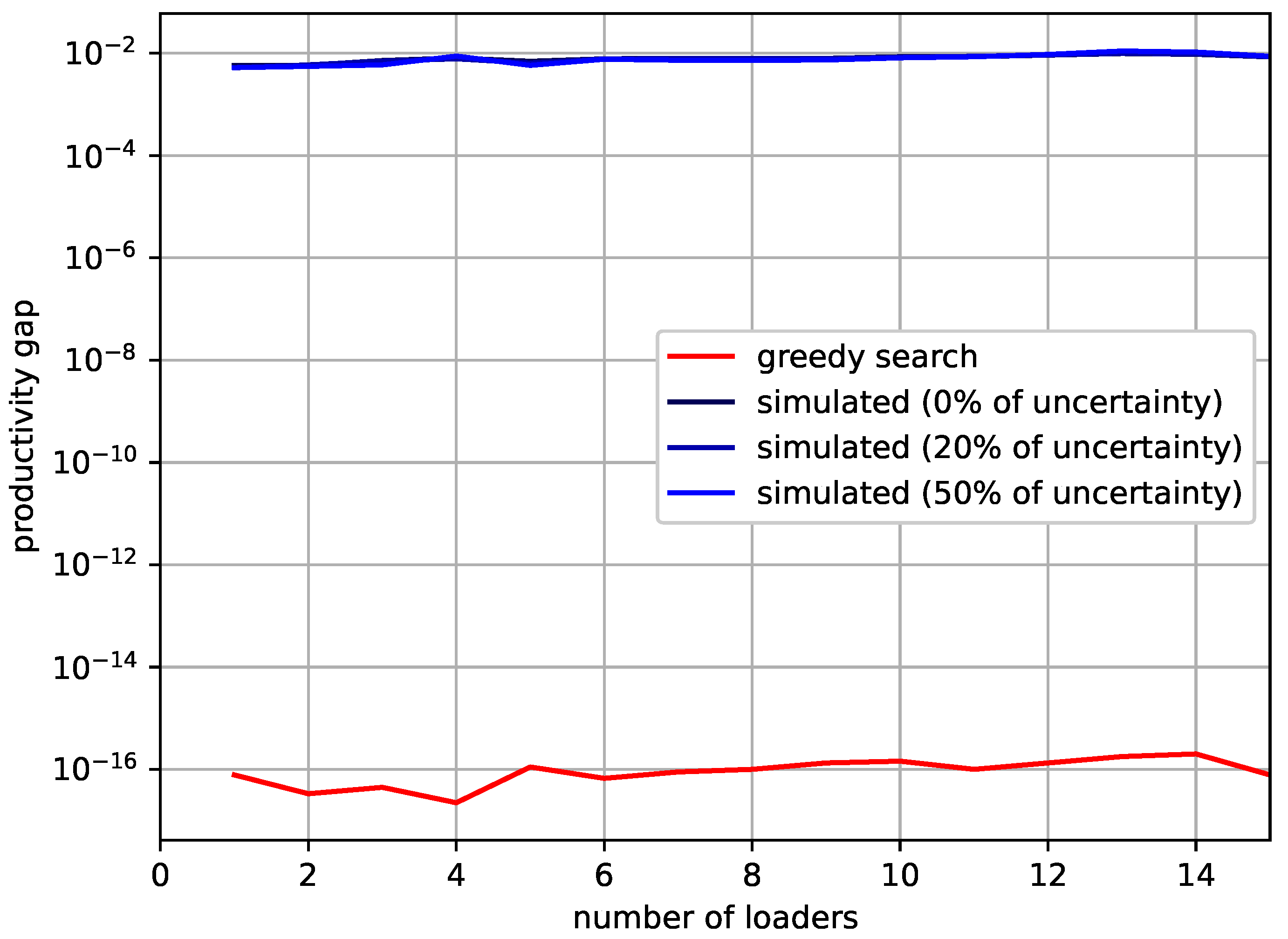
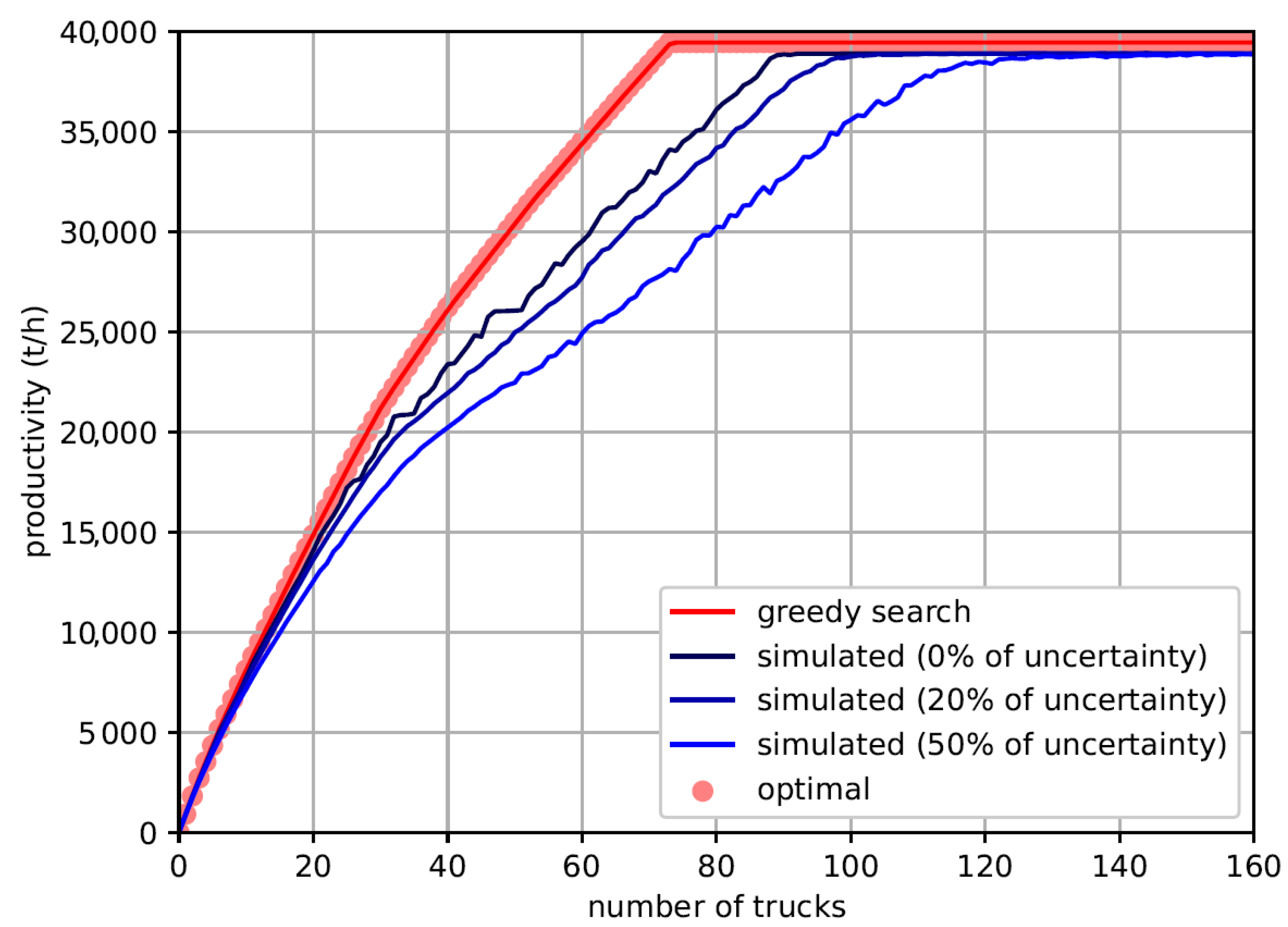
3.2. Fleet Sizing
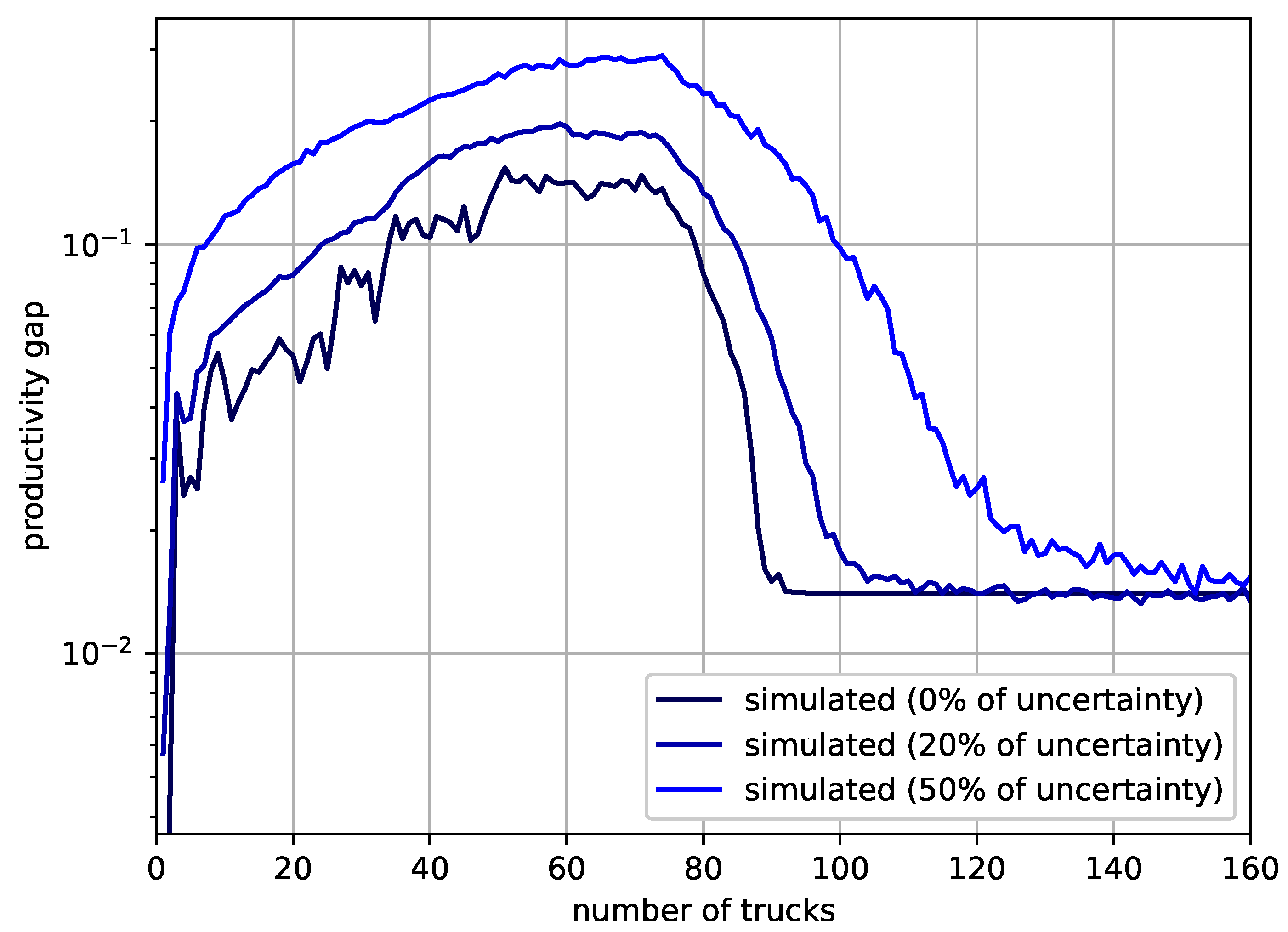
3.3. A Tight Upper Bound
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Humphreys, D. The mining industry after the boom. Miner. Econ. 2019, 32, 145–151. [Google Scholar] [CrossRef]
- Alarie, S.; Gamache, M. Overview of solution strategies used in truck dispatching systems for open pit mines. Int. J. Surf. Mining Reclam. Environ. 2002, 16, 59–76. [Google Scholar] [CrossRef]
- Hauck, R.F. A real-time dispatching algorithm for maximizing open-pit mine production under processing and blending requirements. In Proceedings, Seminar on Scheduling in Mining, Smelting, and Steelmaking; Canadian Institute of Mining and Metallurgy: Westmount, QC, Canada, 1973; pp. 1–10. [Google Scholar]
- Hauck, R.F. Computer-controlled truck dispatching in open-pit mines. In Computer Methods for the 80’s in the Mineral Industry; Society for Mining Metallurgy: Calgary, AB, Canada, 1979; pp. 735–742. [Google Scholar]
- Li, Z. A methodology for the optimum control of shovel and truck operations in open-pit mining. Min. Sci. Technol. 1990, 10, 337–340. [Google Scholar] [CrossRef]
- Subtil, R.F.; Silva, D.M.; Alves, J.C. A practical approach to truck dispatch for open pit mines. In Proceedings of the 35Th APCOM Symposium, Wollongong, NSW, Australia, 24–30 September 2011. [Google Scholar]
- Moradi Afrapoli, A.; Askari-Nasab, H. Mining fleet management systems: A review of models and algorithms. Int. J. Min. Reclam. Environ. 2019, 33, 42–60. [Google Scholar] [CrossRef]
- Lizotte, Y.; Bonates, E. Truck and shovel dispatching rules assessment using simulation. Min. Sci. Technol. 1987, 5, 45–58. [Google Scholar] [CrossRef]
- Temeng, V.A.; Otuonye, F.O.; Frendewey, J.O., Jr. Real-time truck dispatching using a transportation algorithm. Int. J. Surf. Mining Reclam. Environ. 1997, 11, 203–207. [Google Scholar] [CrossRef]
- Afrapoli, A.M.; Tabesh, M.; Askari-Nasab, H. A multiple objective transportation problem approach to dynamic truck dispatching in surface mines. Eur. J. Oper. Res. 2019, 276, 331–342. [Google Scholar] [CrossRef]
- Afrapoli, A.M.; Tabesh, M.; Askari-Nasab, H. A transportation problem-based stochastic integer programming model to dispatch surface mining trucks under uncertainty. In Proceedings of the 27th International Symposium on Mine Planning and Equipment Selection-MPES 2018; Springer: Berlin/Heidelberg, Germany, 2019; pp. 255–264. [Google Scholar]
- Maran, J. Study of Truck Allocation and Truck Dispatching Problems in Open Pit Mines. Master’s Thesis, Virginia Tech, Blacksburg, VA, USA, 1987. [Google Scholar]
- Burt, C.N.; Caccetta, L. Match factor for heterogeneous truck and loader fleets. Int. J. Min. Reclam. Environ. 2007, 21, 262–270. [Google Scholar] [CrossRef]
- Dabbagh, A.; Bagherpour, R. Development of a match factor and comparison of its applicability with ant-colony algorithm in a heterogeneous transportation fleet in an open-pit mine. J. Min. Sci. 2019, 55, 45–56. [Google Scholar] [CrossRef]
- Mohtasham, M.; Mirzaei-Nasirabad, H.; Askari-Nasab, H.; Alizadeh, B. Truck fleet size selection in open-pit mines based on the match factor using a MINLP model. Min. Technol. 2021, 130, 159–175. [Google Scholar] [CrossRef]
- Ercelebi, S.G.; Bascetin, A. Optimization of shovel-truck system for surface mining. J. S. Afr. Inst. Min. Metall. 2009, 109, 433–439. [Google Scholar]
- Ganguli, R.; Bandopadhyay, S. Expert system for equipment selection. Int. J. Surf. Mining Reclam. Environ. 2002, 16, 163–170. [Google Scholar] [CrossRef]
- Lashgari, A.; Yazdani-Chamzini, A.; Fouladgar, M.M.; Zavadskas, E.K.; Shafiee, S.; Abbate, N. Equipment selection using fuzzy multi criteria decision making model: Key study of Gole Gohar iron min. Eng. Econ. 2012, 23, 125–136. [Google Scholar] [CrossRef]
- Edwards, D.J.; Malekzadeh, H.; Yisa, S.B. A linear programming decision tool for selecting the optimum excavator. Struct. Surv. 2001, 19, 113–120. [Google Scholar] [CrossRef]
- Fu, Z.; Topal, E.; Erten, O. Optimisation of a mixed truck fleet schedule through a mathematical model considering a new truck-purchase option. Min. Technol. 2014, 123, 30–35. [Google Scholar] [CrossRef]
- Bakhtavar, E.; Mahmoudi, H. Development of a scenario-based robust model for the optimal truck-shovel allocation in open-pit mining. Comput. Oper. Res. 2020, 115, 1–10. [Google Scholar] [CrossRef]
- Both, C.; Dimitrakopoulos, R. Joint stochastic shortterm production scheduling and fleet management optimization for mining complexes. Optim. Eng. 2020, 21, 1–27. [Google Scholar] [CrossRef]
- Samanta, B.; Sarkar, B.; Mukherjee, S. Selection of opencast mining equipment by a multi-criteria decision-making process. Min. Technol. 2002, 111, 136–142. [Google Scholar] [CrossRef]
- Markeset, T.; Kumar, U. Application of LCC techniques in selection of mining equipment and technology. In Mine Planning and Equipment Selection 2000; Routledge: London, UK, 2018; pp. 635–640. [Google Scholar]
- Que, S.; Anani, A.; Awuah-Offei, K. Effect of ignoring input correlation on truck–shovel simulation. Int. J. Min. Reclam. Environ. 2016, 30, 405–421. [Google Scholar] [CrossRef]
- Chaowasakoo, P.; Seppälä, H.; Koivo, H.; Zhou, Q. Digitalization of mine operations: Scenarios to benefit in real-time truck dispatching. Int. J. Min. Sci. Technol. 2017, 27, 229–236. [Google Scholar] [CrossRef]
- Chaowasakoo, P.; Seppälä, H.; Koivo, H.; Zhou, Q. Improving fleet management in mines: The benefit of heterogeneous match factor. Eur. J. Oper. Res. 2017, 261, 1052–1065. [Google Scholar] [CrossRef]
- Yeganejou, M.; Badiozamani, M.; Moradi-Afrapoli, A.; Askari-Nasab, H. Integration of simulation and dispatch modelling to predict fleet productivity: An open-pit mining case. Min. Technol. 2021, 131, 67–79. [Google Scholar]
- Smith, A.; Linderoth, J.; Luedtke, J. Optimization-based dispatching policies for open-pit mining. Optim. Eng. 2021, 22, 1347–1387. [Google Scholar] [CrossRef]
- Seiler, K.M.; Palmer, A.W.; Hill, A.J. Flow-achieving online planning and dispatching for continuous transportation with autonomous vehicles. IEEE Trans. Autom. Sci. Eng. 2020, 19, 457–472. [Google Scholar] [CrossRef]
- Mirzaei-Nasirabad, H.; Mohtasham, M.; Askari-Nasab, H.; Alizadeh, B. An optimization model for the real-time truck dispatching problem in open-pit mining operations. Optim. Eng. 2023, 24, 2449–2473. [Google Scholar] [CrossRef]
- Yao, J.; Wang, Z.; Chen, H.; Hou, W.; Zhang, X.; Li, X.; Yuan, W. Open-Pit Mine Truck Dispatching System Based on Dynamic Ore Blending Decisions. Sustainability 2023, 15, 3399. [Google Scholar] [CrossRef]
- Arelovich, A.; Masson, F.; Agamennoni, O.; Worrall, S.; Nebot, E. Heuristic rule for truck dispatching in open-pit mines with local information-based decisions. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Madeira, Portugal, 19–22 September 2010; pp. 1408–1414. [Google Scholar]
- Forsman, B.; Rönnkvist, E.; Vagenas, N. Truck dispatch computer simulation in Aitik open pit mine. Int. J. Surf. Min. 1993, 7, 117–120. [Google Scholar] [CrossRef]
- de Carvalho, J.P.; Dimitrakopoulos, R. Integrating Production Planning with Truck-Dispatching Decisions through Reinforcement Learning While Managing Uncertainty. Minerals 2021, 11, 587. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Truck Model | Minimum a (s) | Maximum b (s) | Mode c (s) |
|---|---|---|---|
| 1 | 23 | 47 | 35 |
| 2 | 30 | 54 | 42 |
| Truck Model | Minimum a (s) | Maximum b (s) | Mode c (s) |
|---|---|---|---|
| 1 | 146 | 298 | 222 |
| 2 | 185 | 349 | 267 |
| Truck Model | Minimum a (km/h) | Maximum b (km/h) | Mode c (km/h) |
|---|---|---|---|
| 1 | 15 | 31 | 23 |
| 2 | 17 | 33 | 25 |
| Truck Model | Minimum a (t) | Maximum b (t) | Mode c (t) |
|---|---|---|---|
| 1 | 138 | 148 | 143 |
| 2 | 189 | 201 | 195 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lisboa, A.C.; Castro, F.L.B.; de Venâncio, P.V.A.B. Mine Productivity Upper Bounds and Truck Dispatch Rules. Mining 2023, 3, 786-797. https://doi.org/10.3390/mining3040043
Lisboa AC, Castro FLB, de Venâncio PVAB. Mine Productivity Upper Bounds and Truck Dispatch Rules. Mining. 2023; 3(4):786-797. https://doi.org/10.3390/mining3040043
Chicago/Turabian StyleLisboa, Adriano Chaves, Felipe Luz Barbosa Castro, and Pedro Vinícius Almeida Borges de Venâncio. 2023. "Mine Productivity Upper Bounds and Truck Dispatch Rules" Mining 3, no. 4: 786-797. https://doi.org/10.3390/mining3040043
APA StyleLisboa, A. C., Castro, F. L. B., & de Venâncio, P. V. A. B. (2023). Mine Productivity Upper Bounds and Truck Dispatch Rules. Mining, 3(4), 786-797. https://doi.org/10.3390/mining3040043