1. Introduction
The rapid growth of the world population is the increasing challenge to achieve sustainable agriculture management as long as the human population continues to grow. It is anticipated that throughout the next few decades, the human population would increase by forty percent, reaching 9.7 billion by the year 2050. Because of this, it will be necessary to double the amount of fruit production leading to enhance the agriculture land multiple times. Despite this, it is anticipated that employment in the agricultural sector would fall by one-half by the year 2050, which will result in a shortfall of five million labor farmers. As a result, almost 10% of the world’s fruit cannot be harvested, an amount that is equivalent to the yearly consumption of the European Union [
1].
The harvest is a seasonal, low-paid, repetitive, and labor-intensive occupation with limited employment prospects. Older farmers are retiring, and their young ones have no interest in replacing them. Labor deficits cause harvest delays, and fruit harvested with a delay of few days degrades in quality and may lose as much as 80% of its market worth. Therefore, worldwide growers lose an estimated USD 30 billion per year in potential sales from non-harvestable fruits [
2]. Consequently, crop management has evolved dramatically during the past few decades. Specifically, ground and aerial robots have been implemented in agriculture, indicating their ability to meet the rising food demand by automating previously laborious agricultural processes, such as harvesting [
3]. Therefore, robotic systems have been developed to compensate the human shortage, to raise the pace of harvesting, and to enhance the efficiency.
In conventional manual harvesting, the laborers use their hands to remove leaves and branches, hold the fruit, and extract it from the plant by pulling it away, occasionally with the use of a cutting instrument. Manual harvesting requires experience; an untrained farmer may unwittingly cause damage to the plants. However, the kinematics of the human hands and body, sense of touch, and muscular power endow people with innate grabbing ability and a high degree of rapid adaptation to various crop shapes and textures for delivering the appropriate detachment force. However, human abilities are limited only by fatigue. A robotic system, on the other hand, can harvest constantly, precisely, and tirelessly with regularity. Therefore, researchers attempt to imitate human harvesting techniques, resulting in kinematic models for the movement of robotic arms and the building of sophisticated end effectors with the requisite sensors for crop manipulation [
4]. In addition, recent changes in dietary needs and the production of biofuels on croplands have contributed to the existing strain on the world’s food supply [
5].
2. Use of Robot Picking in Agriculture
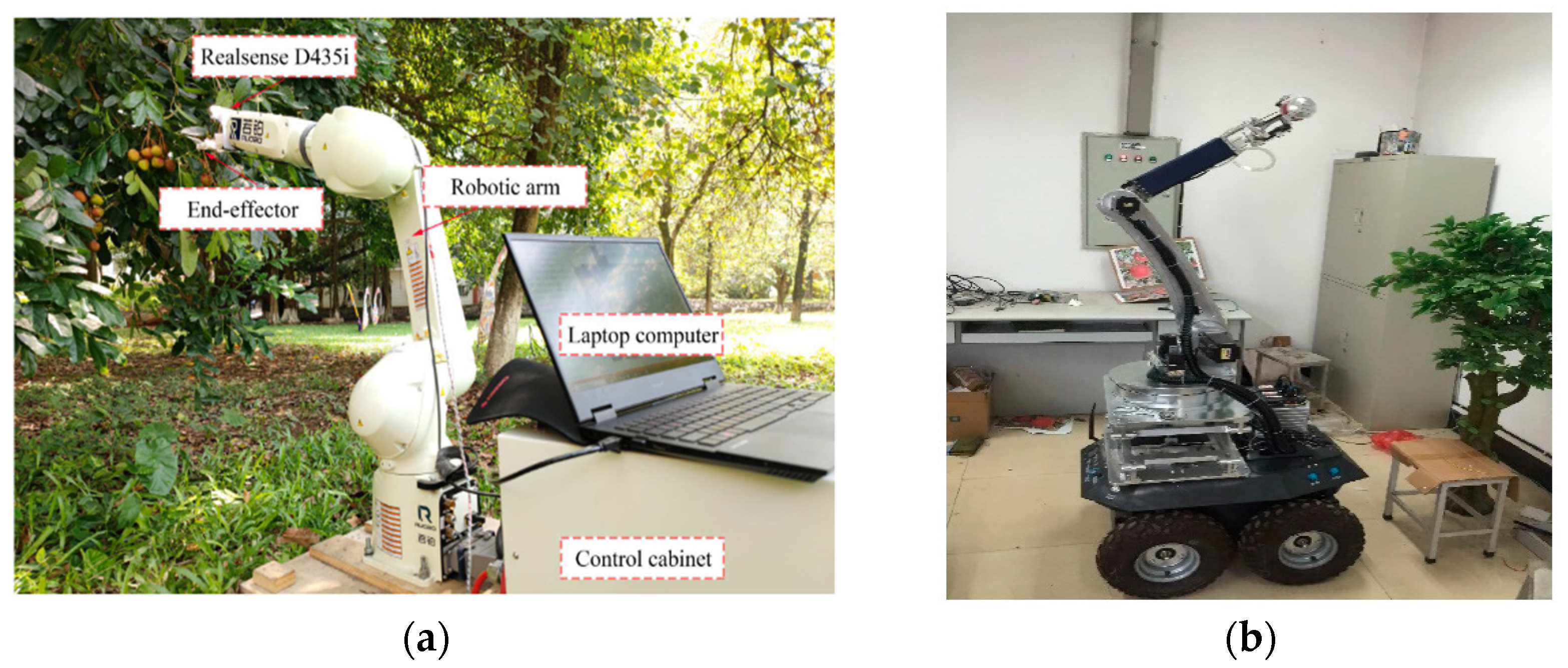
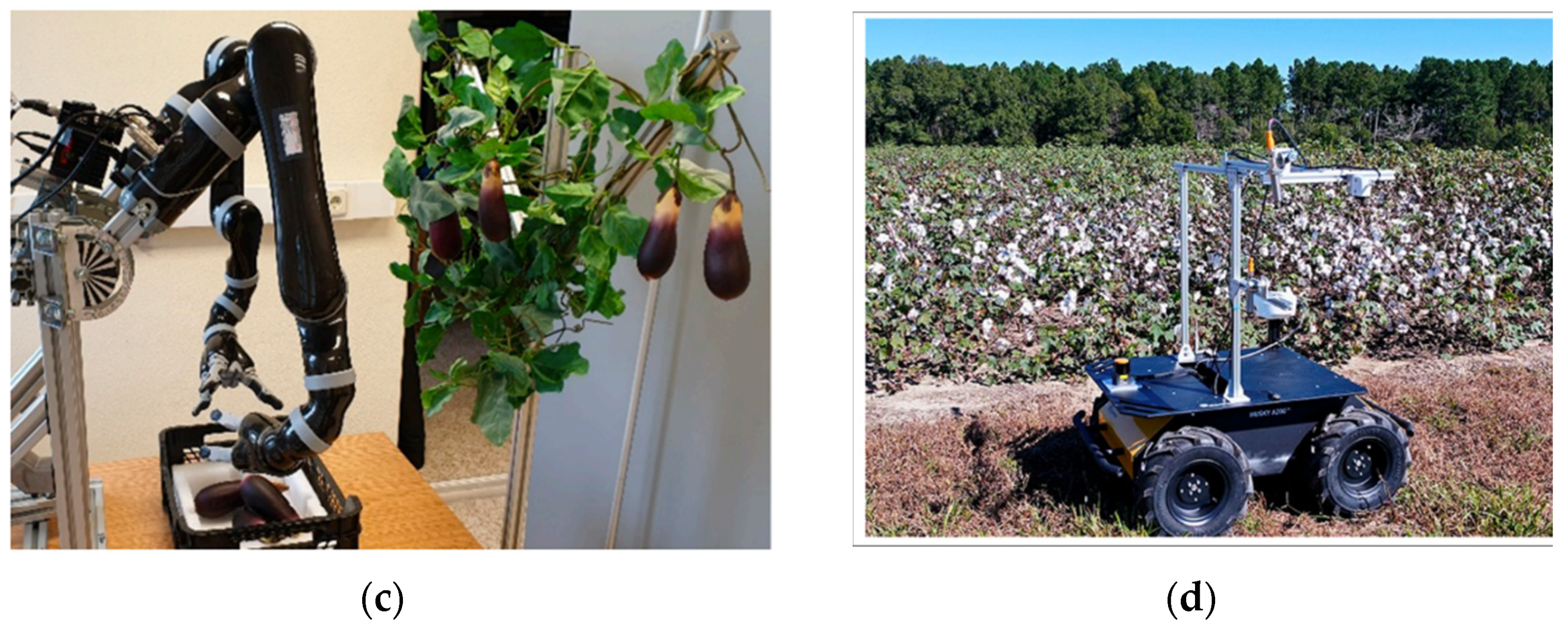
Agriculture is an issue of big data without big data. Nearly half of conventional agricultural inputs (fertilizers, insecticides, fungicides, herbicides, etc.) are often wasted because they are applied in excess or in the incorrect location (between rows rather than on plants themselves). In the future, commercial farms may be operated by robots that can detect, spray, and harvest specific pieces of fruit, even when their objectives are grapes, peppers, and apples that are the same color as the surrounding leaves as shown in
Figure 1 [
6]. For many crops, harvesting is the most labor-intensive task, but even proponents acknowledge that no machine has been constructed that comes close to matching human sensory motor control [
7]. Robots could potentially provide a timely supply of labor in many locations where there are insufficient temporary workers available during the harvesting cycle.
3. Use of Drones for Fruit Picking
Agricultural robotic systems consist of an autonomous mobile platform, a light multi-degree-of-freedom mechanical arm, a force feedback system with a flexible end effector, a multi-sensor machine vision system, a drive control system, an intelligent decision system, and supplementary software and hardware. The arm of the drone has been programmed to grasp the desired object. A position is assigned to the drone, which is watched by the controller (human) via the camera attached to the drone. Once the location of the drone has been established according to the controller’s instructions, the drone’s speed is slowed, and the end effector opens and grips the desired object using suction cups attached to the effector’s inner lining. This procedure is repeated until the controller obtains the desired object through a number of trials. The working environment of a fruit harvesting drone’s visual components is quite complex. The object items vary in size, form, type, and surface roughness. Background and sunlight of the vegetation continuously alters. Vision-based harvesting robots must be able to sense and adapt to diverse crop varieties or environmental changes, gather information, detect targets, and train autonomously. Additionally, the robots should be capable of sophisticated reasoning and decision-making. It is a clever machine for human–computer interaction. Additionally, the robotic system should have a network transmission feature for transferring cropped photographs to a data center or server.
4. Conclusions
Today, technology is essential in every sector of society’s growth, from construction to transportation to aerospace to communications to defense. Even time-honored industries such as farming need technology (in this case, smart farming) to increase output while decreasing labor requirements. However, smart farming necessitates substantial outlays of capital, enhanced coverage and connectivity, and more bandwidth to process the massive amounts of data generated by a huge number of remotely installed sensors and devices. The first steps toward a robotic future in horticulture and precision agriculture are the creation of a vision and the prediction of possible outcomes. Predicting the rate at which farmers and businesses will embrace new technologies requires a clear vision of the future, some thought about whether or not that future is desirable, and some research into historical data. Understanding what is being predicted and how these predictions offer for democratic interaction with the farmers who are meant to participate in technology transitions is becoming increasingly important. In this study, we adopt the assemblage approach to emphasize the importance of recognizing the intricate material entanglements within which anticipatory assembly occurs in order to include farmers as active actors in technology transitions.
Author Contributions
Conceptualization, S.H., K.F. and M.J.M.C.; methodology, S.H., K.F. and S.R.S.; validation, T.I.; formal analysis, S.H., and K.F.; investigation, S.R.S, M.J.M.C. and T.I.; resources, S.H. and M.J.M.C.; data curation, S.R.S., M.J.M.C. and T.I.; writing—original draft preparation, S.H. and K.F.; writing—review and editing, S.H. and K.F.; visualization, S.R.S. and T.I.; supervision, S.H., M.J.M.C. and S.R.S.; project administration, S.H., S.R.S., M.J.M.C. and T.I. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not Applicable.
Informed Consent Statement
Not Applicable.
Data Availability Statement
Not Applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Liu, J.; Ling, C.; Guo, S.C.; Peng, Z.Y. Design and research of citrus fruit picking machine. Packag. Eng. 2019, 40, 56–62. [Google Scholar]
- Zhuang, J.J.; Luo, S.M.; Hou, C.J.; Tang, Y.; He, Y.; Xue, X.Y. Detection of orchard citrus fruits using a monocular machine vision-based method for automatic fruit picking applications. Comput. Electron. Agric. 2018, 152, 64–73. [Google Scholar] [CrossRef]
- Zhao, Y.; Gong, L.; Liu, C.; Huang, Y. Dual-arm robot design and testing for harvesting tomato in greenhouse. IFAC-PapersOnLine 2016, 49, 161–165. [Google Scholar] [CrossRef]
- Berners-Lee, M.; Kennelly, C.; Watson, R.; Hewitt, C.N. Current global food production is sufficient to meet human nutritional needs in 2050 provided there is radical societal adaptation. Elem. Sci. Anthr. 2018, 6, 52. [Google Scholar] [CrossRef]
- Morar, C.; Doroftei, I.; Doroftei, I.; Hagan, M. Robotic applications on agricultural industry. A review. In Proceedings of the 9th International Conference on Advanced Concepts in Mechanical Engineering—ACME 2020, Iași, Romania, 4–5 June 2020; Volume 997, p. 012081. [Google Scholar]
- Godfray, H.C.J.; Beddington, J.R.; Crute, I.R.; Haddad, L.; Lawrence, D.; Muir, J.F.; Pretty, J.; Robinson, S.; Thomas, S.M.; Toulmin, C. Food security: the challenge of feeding 9 billion people. Science 2010, 327, 812–818. [Google Scholar] [CrossRef] [PubMed]
- Arikapudi, R.; Vougioukas, S.G.J.I.A. Robotic tree-fruit harvesting with telescoping arms: A study of linear fruit reachability under geometric constraints. IEEE Access 2021, 9, 17114–17126. [Google Scholar] [CrossRef]
- Wang, H.; Lin, Y.; Xu, X.; Chen, Z.; Wu, Z.; Tang, Y. A study on long-close distance coordination control strategy for Litchi picking. Agronomy 2022, 12, 1520. [Google Scholar] [CrossRef]
- Chen, W.; Xu, T.; Liu, J.; Wang, M.; Zhao, D. Picking robot visual servo control based on modified fuzzy neural network sliding mode algorithms. Electronics 2019, 8, 605. [Google Scholar] [CrossRef]
- Gonzalez-de-Santos, P.; Fernández, R.; Sepúlveda, D.; Navas, E.; Emmi, L.; Armada, M. Field robots for intelligent farms—Inhering features from industry. Agronomy 2020, 10, 1638. [Google Scholar] [CrossRef]
- Fue, K.G.; Porter, W.M.; Barnes, E.M.; Rains, G.C. An extensive review of mobile agricultural robotics for field operations: focus on cotton harvesting. AgriEngineering 2020, 2, 150–174. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 





{kind=link}
{kind=link}