


Air Monitoring System Based on Unmanned Aerial Vehicle Powered from the Ground †



Abstract
:1. Introduction
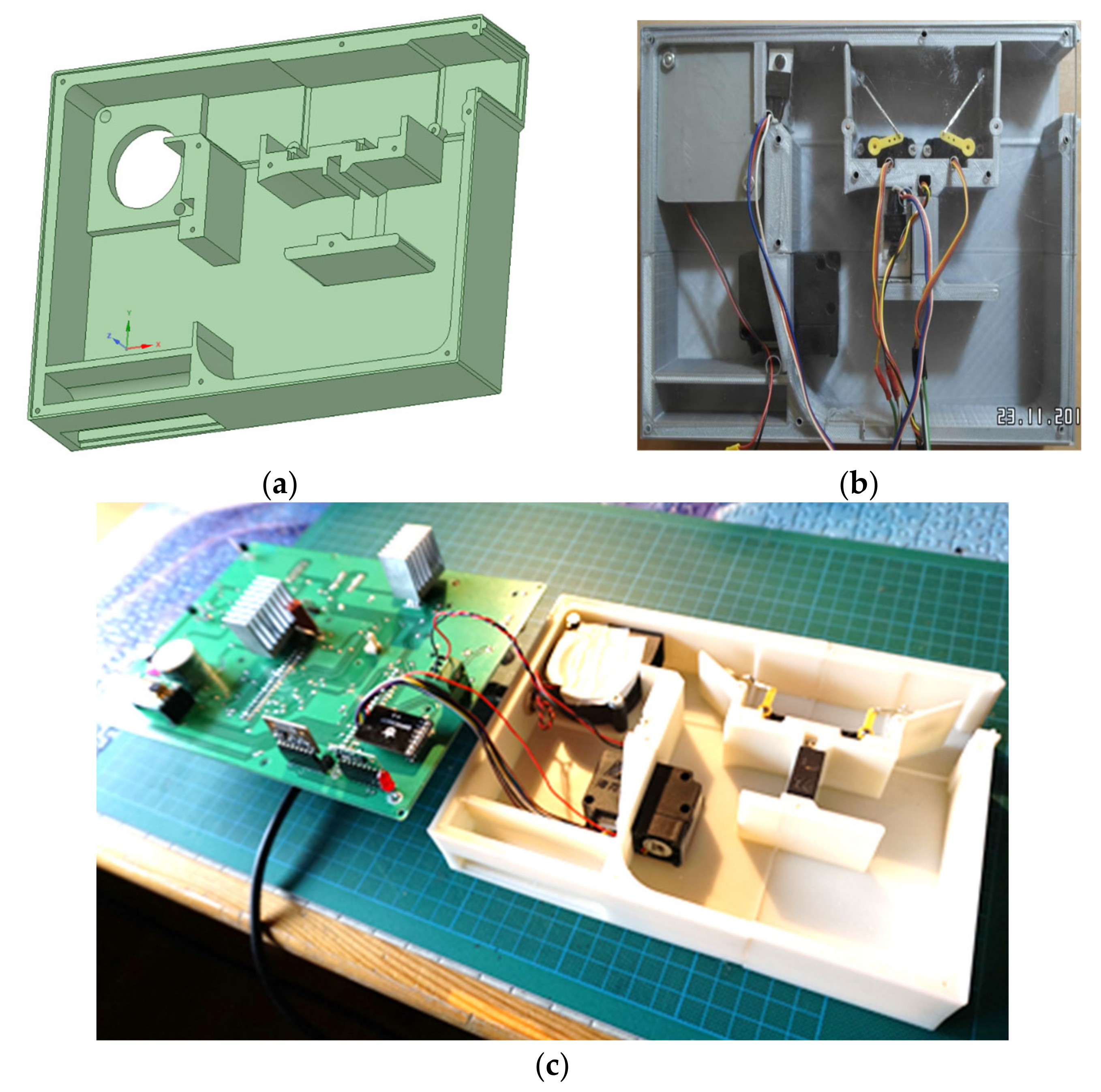
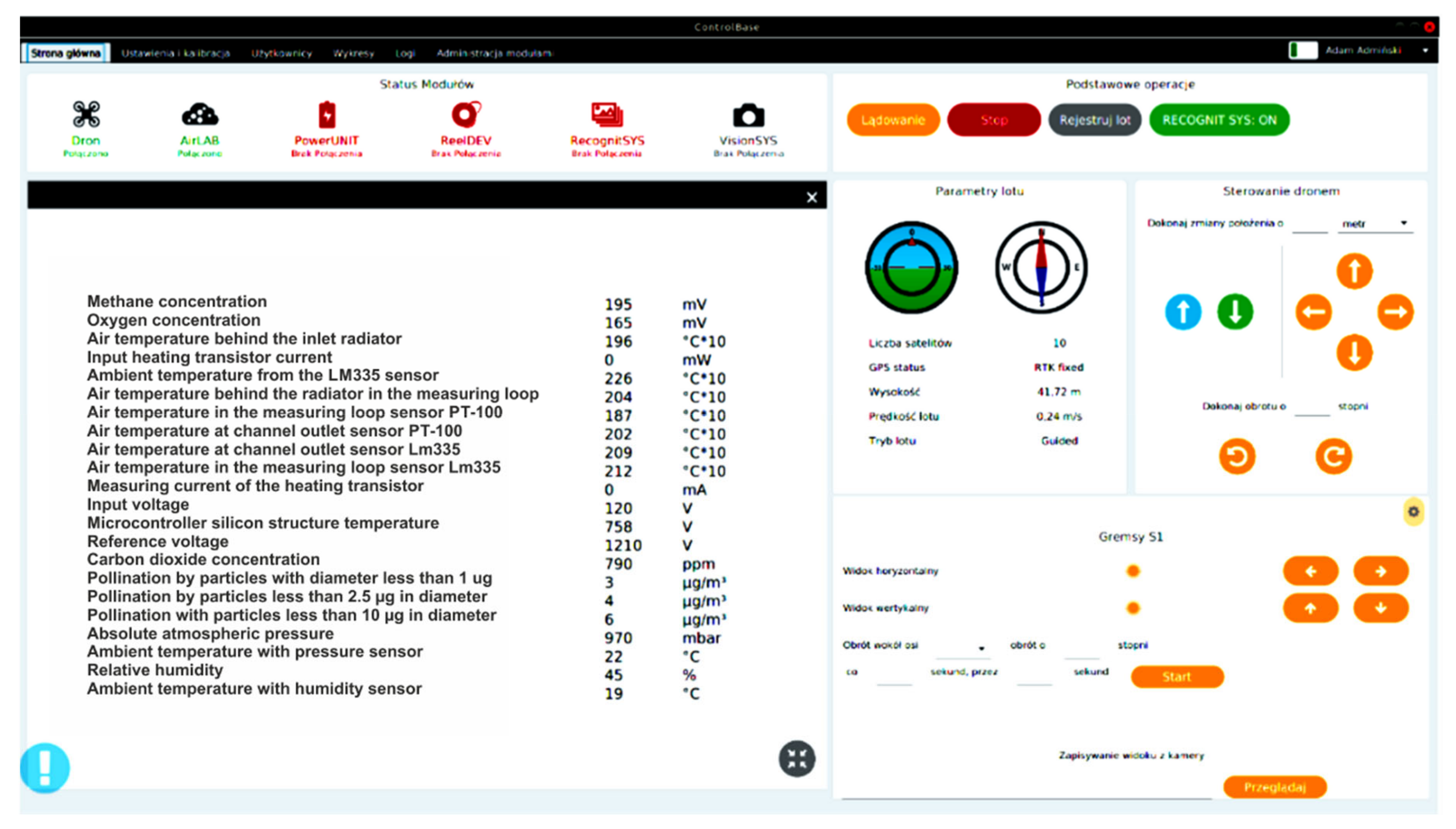
2. The Air Monitoring Platform
3. Results and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gu, Q.; Jia, C. A Consumer UAV-based Air Quality Monitoring System for Smart Cities. In Proceedings of the 2019 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 11–13 January 2019; IEEE: New York, NY, USA, 2019. [Google Scholar] [CrossRef]
- Yao, Y.; Wei, S.; Zhang, H.; Li, Q. Application of UAV in Monitoring Chemical Pollutant Gases. Chem. Eng. Trans. 2018, 67, 583–588. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Power Requirements | Voltage | 20 V DC–32 V DC |
|---|---|---|
| Power consumption | Maximum consumption | 40 W |
| Communication | Wired | USB, [emulated COM 115200/N/8/1] |
| Wireless | WiFi, USART [115200/N/8/1] | |
| Memory | Number of samples | 4091 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Walendziuk, W.; Słowik, M.; Gulewicz, M. Air Monitoring System Based on Unmanned Aerial Vehicle Powered from the Ground. Environ. Sci. Proc. 2022, 18, 18. https://doi.org/10.3390/environsciproc2022018018
Walendziuk W, Słowik M, Gulewicz M. Air Monitoring System Based on Unmanned Aerial Vehicle Powered from the Ground. Environmental Sciences Proceedings. 2022; 18(1):18. https://doi.org/10.3390/environsciproc2022018018
Chicago/Turabian StyleWalendziuk, Wojciech, Maciej Słowik, and Małgorzata Gulewicz. 2022. "Air Monitoring System Based on Unmanned Aerial Vehicle Powered from the Ground" Environmental Sciences Proceedings 18, no. 1: 18. https://doi.org/10.3390/environsciproc2022018018
APA StyleWalendziuk, W., Słowik, M., & Gulewicz, M. (2022). Air Monitoring System Based on Unmanned Aerial Vehicle Powered from the Ground. Environmental Sciences Proceedings, 18(1), 18. https://doi.org/10.3390/environsciproc2022018018