
Data-Driven, Short-Term Prediction of Charging Station Occupation

 , , , , and
, , , , and 
Abstract
1. Introduction
- How can the machine learning tools be employed to efficiently predict how long a charge point at an electric vehicle charging station will be occupied?
2. Materials and Methods
2.1. Data
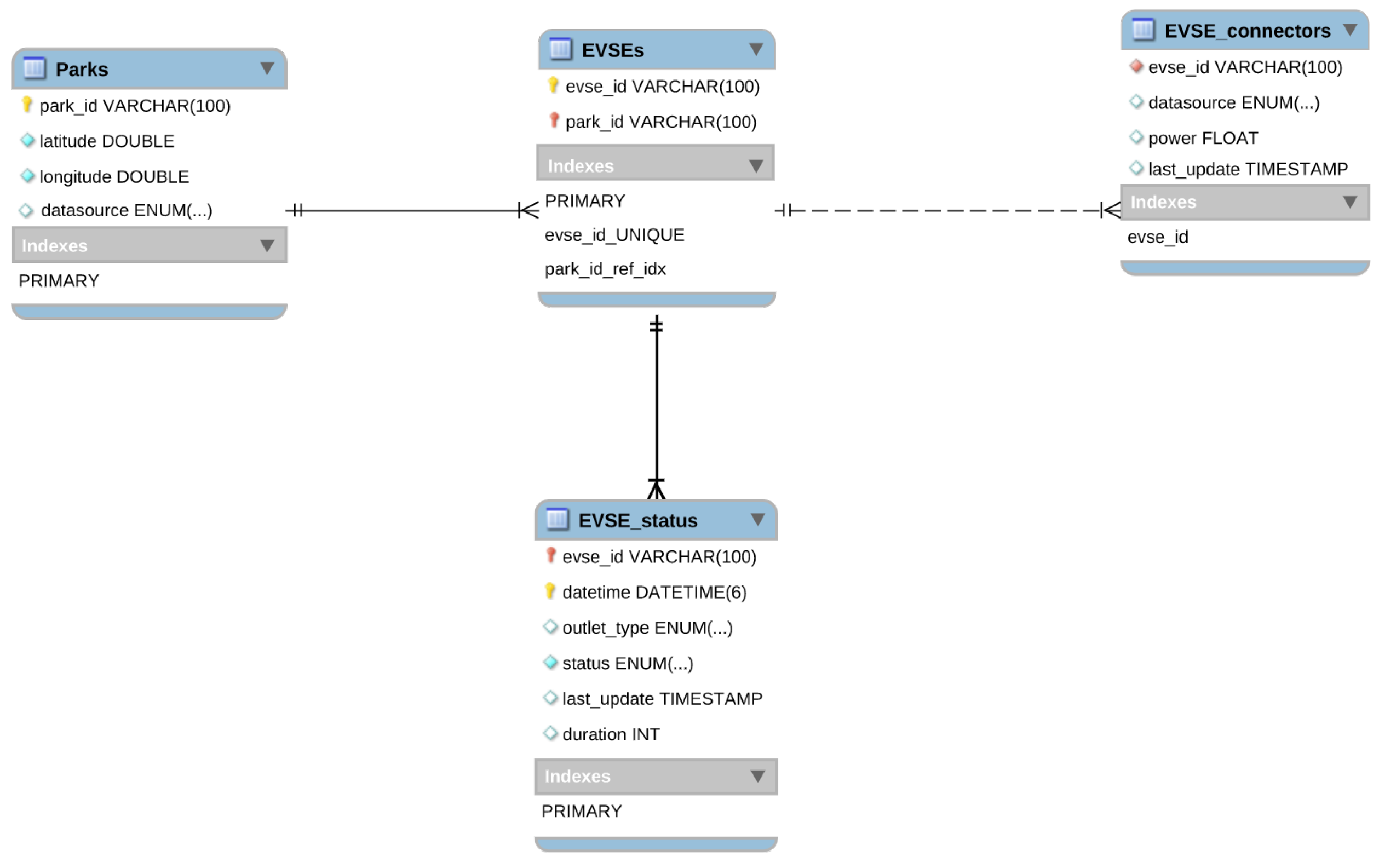
2.1.1. Historical Data
- Charging stations (referred to as Parks in the database) and their characteristics (latitude, longitude, address).
- Electric vehicle supply equipment (EVSEs) inside each charging station.
- Outlet type and power of EVSEs (EVSE_connectors).
- Status changes of EVSEs and the date and time of the availability and occupation (EVSE_status).
2.1.2. Feature Selection
- Station location: We assume neighboring stations have a roughly comparable occupancy. It is also a way of differentiating between different stations without using individual IDs.
- Start time: EV users who start their charging sessions early in the morning may also be rushing to get to work. Hence, how long drivers stay at a station varies in the early morning or late evening.
- Month: The month of the charging event takes into account any seasonal influence.
- Power: Despite the fact that the data is limited to charging events of fast chargers, it is anticipated that recharging at a connection with 95 kW of power takes longer than one with 150 kW.
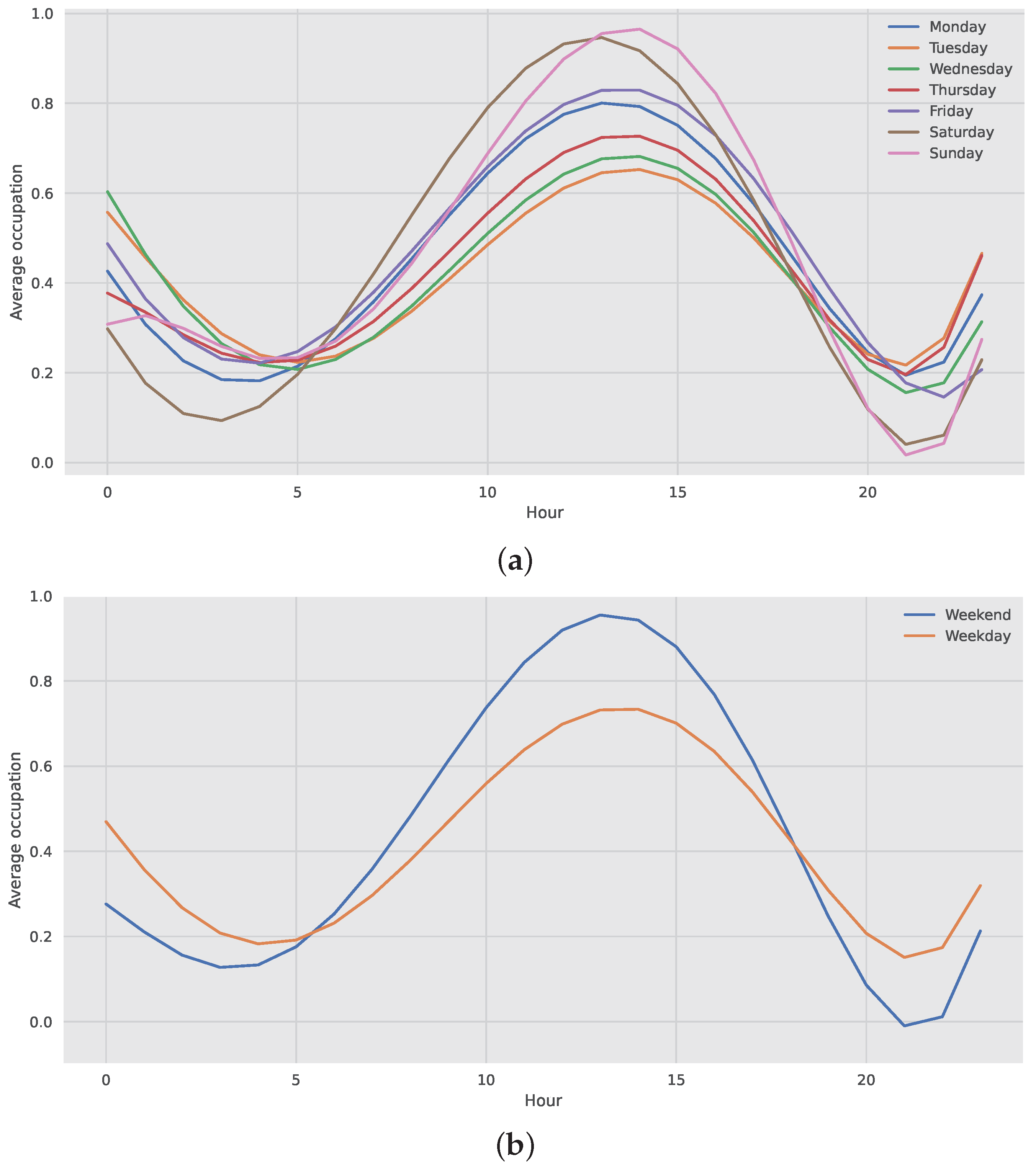
- Weekday and IsWeekend: The weekly average of station occupation is shown in Figure 2 for various times of the day. The occupation average for various days of the week is depicted in the right diagram. It is clear that the weekend’s (Saturday and Sunday) occupation is both quite similar to each other and distinct from that of the other days of the week during rush hours (after 10 AM to 16 PM). Additionally, other days of the week have occupation distributions that are more comparable to one another than the weekend, although other days nevertheless have distinct occupation average distributions. The average occupancy rate for a day, divided by weekday, is shown in Figure 2a. Figure 2b compares the average occupation on weekends and other days of the week. The figures display normal charging behavior, including daily cycles and higher usage before and after working hours on weekdays but lower usage during working hours compared to weekends. Generally speaking, all stations follow these trends.
- Occupation_avg: The average occupation, which is the output of the average week model, is used as an input feature. The average week model is a basic model used by Hecht et al. [5] as a baseline for the prediction of mid-term occupation status. It is calculated by averaging the weekly usage of a charging station at an hourly resolution. For this work, the averaging is carried out for each week of the year, considering 0 for available status and 1 for occupied. Equations (1) and (2) show the average week model process, where d is the day of the week, h is the hour of the day and w stands for the week number.Including occupation_avg, alone improves prediction performance significantly.
2.1.3. Train–Test Split
2.2. Methods
2.2.1. Model Selection
2.2.2. Prediction
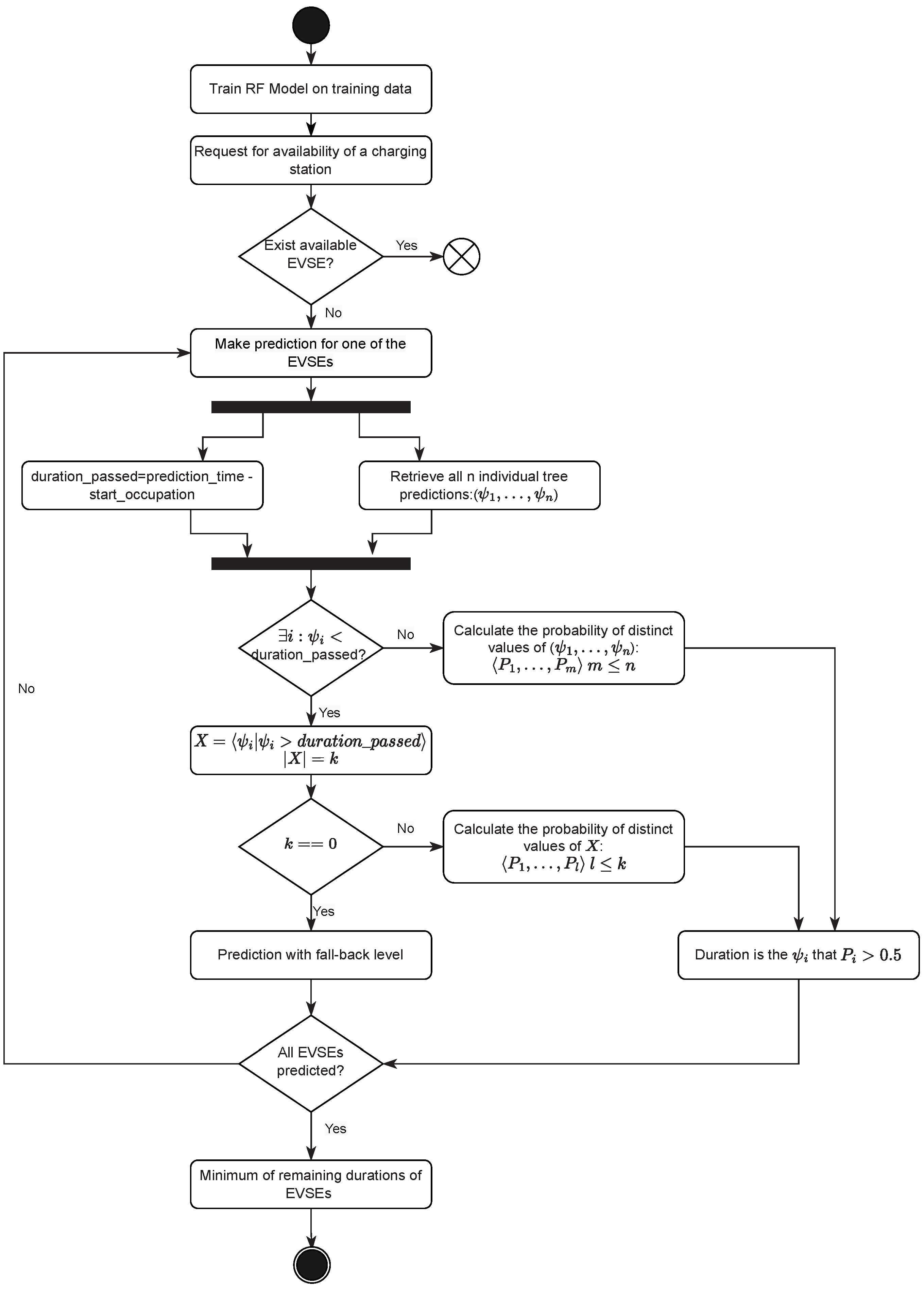
- In the first step, the RF model is trained using the complete historical data of charging events as well as relevant features, along with 100 estimator trees. The hyperparameter tuning method is used to determine the number of estimators that the RF model will have.
- Assume that a driver plans to arrive at a fully occupied charging station with two EVSEs at time , so that they can recharge their battery. As a result, the driver wants to find out whether or not the station has available EVSEs and, if it does not, how much they will have to wait before they can begin charging. Taking into account the fact that both of the EVSEs are being utilized at the given time , the following method of duration prediction will be carried out on each of the EVSEs separately, until the charging duration of the running events at each of the EVSEs in the target station is predicted.
- –
- Consider the time to be the beginning of the charging event that took place at the EVSE. The duration that the station has been occupied up to this point can be determined ().
- –
- The trained RF model will be used to make a prediction for the total charging time that will be required for the charging event. Each of the estimators that make up the RF model makes a prediction regarding the duration, and the RF model provides the average of the values that are anticipated. However, we take the value that was predicted for each tree. represents the outcome of the ith tree analysis.
- –
- We know how long the EVSE has been occupied and have the results of estimate tree predictions. Consequently, it is evident that the trees that predicted a duration shorter than are incorrect. To improve the model’s prediction accuracy, we filtered out the incorrect predictions.
- –
- The charging period of the present event at the EVSE is the median of the predictions made by the remaining, more accurate trees. The median is far less affected by extreme values than the arithmetic mean. As consumers occasionally remain at a charging station for far longer than usual, the estimate trees always include some very lengthy durations that seldom occur. Therefore, the median performs better than the mean. On the other hand, if the events at a particular station are likely to be very lengthy, the majority of estimators predict that the duration will be long, and the median is likewise an accurate representation.To describe it formally, assume represents the ordered list of various duration estimates given by n estimator trees of RF for a certain charging event, with being the lowest forecast and being the greatest. The unique prediction values are where .The probability list represents the likelihood of a unique prediction exceeding the anticipated values. For instance, is the probability that the duration will be greater than and is always . indicates the likelihood that the duration will be at least the expected amount where the median corresponds to .
- –
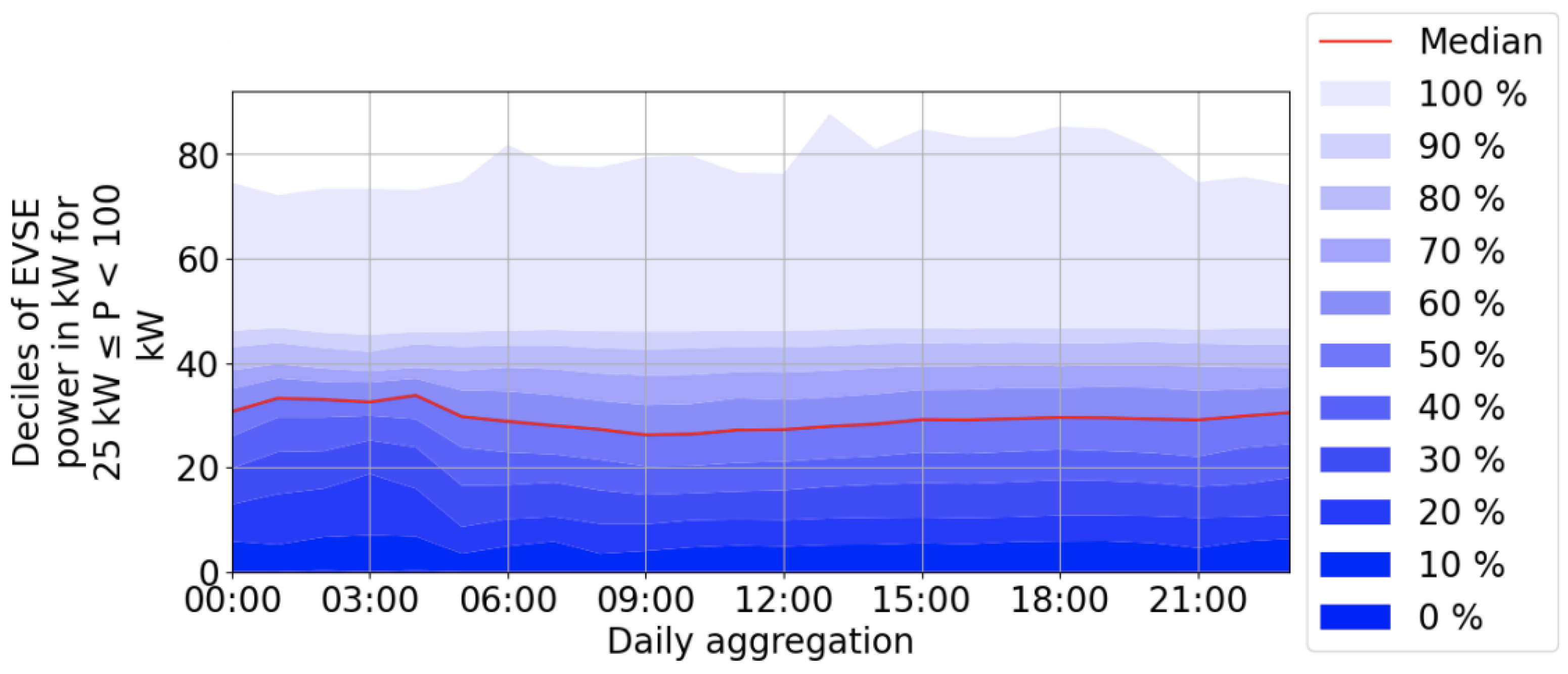
- For some charging occurrences, all estimators may have estimated the length to be shorter than the . After filtering out the incorrect estimators, there would be no remaining estimator results to make the prediction upon.To predict the charging duration in such instances, models are trained for specific power levels, and if the station-specific model cannot make a reasonable prediction, we move to these broader models. The graph shown in Figure 4 depicts the length of time people stayed based on the starting time indicated on the x-axis. The blue shades indicate the deciles. For events that are longer than usual, the median of the remaining portion is utilized to predict the duration. Therefore, if 10 h have passed and that corresponds to of the data, then the new expected value is the median of the remaining parts, which is the decile (().
- The remaining wait time at the station is the minimum of the durations determined for the various EVSEs within the station. The new user is able to begin charging at the station as soon as one of the EVSEs becomes available.
3. Results
3.1. Model Results
3.1.1. First Evaluation Scenario
3.1.2. Second Evaluation Scenario
3.2. Model Comparison
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| RF | Random forest |
| LightGBM | Light gradient boosting machine |
| EV | Electric vehicle |
| EVSE | Electric vehicle supply equipment |
Appendix A
Metric Descriptions
References
- Rogelj, J.; Den Elzen, M.; Höhne, N.; Fransen, T.; Fekete, H.; Winkler, H.; Schaeffer, R.; Sha, F.; Riahi, K.; Meinshausen, M. Paris Agreement climate proposals need a boost to keep warming well below 2 C. Nature 2016, 534, 631–639. [Google Scholar] [CrossRef] [PubMed]
- German Advisory Council on the Environment. Time to Take a Turn: Climate Action in the Transport Sector. Available online: https://www.umweltrat.de/SharedDocs/Downloads/EN/02_Special_Reports/2016_2020/2018_04_special_report_transport_sector_summary.pdf?__blob=publicationFile%26v=21 (accessed on 20 March 2023).
- Germany’s Greenhouse Gas Emissions and Energy Transition Targets. Available online: https://www.cleanenergywire.org/factsheets/germanys-greenhouse-gas-emissions-and-climate-targets (accessed on 27 October 2022).
- Ma, T.Y.; Faye, S. Multistep electric vehicle charging station occupancy prediction using hybrid LSTM neural networks. Energy 2022, 244, 123217. [Google Scholar] [CrossRef]
- Hecht, C.; Figgener, J.; Sauer, D.U. Predicting Electric Vehicle Charging Station Availability Using Ensemble Machine Learning. Energies 2021, 14, 7834. [Google Scholar] [CrossRef]
- Soldan, F.; Bionda, E.; Mauri, G.; Celaschi, S. Short-term forecast of EV charging stations occupancy probability using big data streaming analysis. arXiv 2021, arXiv:2104.12503. [Google Scholar]
- Global EV Outlook 2022. Available online: https://www.iea.org/reports/global-ev-outlook-2022 (accessed on 27 October 2022).
- Neaimeh, M.; Salisbury, S.D.; Hill, G.A.; Blythe, P.T.; Scoffield, D.R.; Francfort, J.E. Analysing the usage and evidencing the importance of fast chargers for the adoption of battery electric vehicles. Energy Policy 2017, 108, 474–486. [Google Scholar] [CrossRef]
- Hecht, C.; Spreuer, K.G.; Figgener, J.; Sauer, D.U. Market Review and Technical Properties of Electric Vehicles in Germany. Vehicles 2022, 4, 903–916. [Google Scholar] [CrossRef]
- Hecht, C.; Figgener, J.; Sauer, D.U. Analysis of Electric Vehicle Charging Station Usage and Profitability in Germany based on Empirical Data. arXiv 2022, arXiv:2206.09582. [Google Scholar] [CrossRef] [PubMed]
- Xu, P.; Sun, X.; Wang, J.; Li, J.; Zheng, W.; Liu, H. Dynamic pricing at electric vehicle charging stations for waiting time reduction. In Proceedings of the 4th International Conference on Communication and Information Processing, Qingdao, China, 2–4 November 2018; pp. 204–211. [Google Scholar]
- Xu, P.; Li, J.; Sun, X.; Zheng, W.; Liu, H. Dynamic pricing at electric vehicle charging stations for queueing delay reduction. In Proceedings of the 2017 IEEE 37th International Conference on Distributed Computing Systems (ICDCS), Atlanta, GA, USA, 5–8 June 2017; pp. 2565–2566. [Google Scholar]
- Hecht, C.; Das, S.; Bussar, C.; Sauer, D.U. Representative, empirical, real-world charging station usage characteristics and data in Germany. ETransportation 2020, 6, 100079. [Google Scholar] [CrossRef]
- Galus, M.D.; Vayá, M.G.; Krause, T.; Andersson, G. The role of electric vehicles in smart grids. In Advances in Energy Systems: The Large-Scale Renewable Energy Integration Challenge; Wiley: Hoboken, NJ, USA, 2019; pp. 245–264. [Google Scholar]
- Frendo, O.; Graf, J.; Gaertner, N.; Stuckenschmidt, H. Data-driven smart charging for heterogeneous electric vehicle fleets. Energy AI 2020, 1, 100007. [Google Scholar] [CrossRef]
- Lee, G.; Lee, T.; Low, Z.; Low, S.H.; Ortega, C. Adaptive charging network for electric vehicles. In Proceedings of the 2016 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Washington, DC, USA, 7–9 December 2016; pp. 891–895. [Google Scholar]
- Lee, Z.J.; Chang, D.; Jin, C.; Lee, G.S.; Lee, R.; Lee, T.; Low, S.H. Large-scale adaptive electric vehicle charging. In Proceedings of the 2018 IEEE International Conference on Communications, Control, and Computing Technologies for Smart Grids (SmartGridComm), Anaheim, CA, USA, 26–29 November 2018; pp. 1–7. [Google Scholar]
- Nakahira, Y.; Chen, N.; Chen, L.; Low, S.H. Smoothed least-laxity-first algorithm for EV charging. In Proceedings of the Eighth International Conference on Future Energy Systems, Shatin, Hong Kong, 16–19 May 2017; pp. 242–251. [Google Scholar]
- Lee, Z.J.; Li, T.; Low, S.H. ACN-Data: Analysis and applications of an open EV charging dataset. In Proceedings of the Tenth ACM International Conference on Future Energy Systems, Phoenix, AZ, USA, 25–28 June 2019; pp. 139–149. [Google Scholar]
- Tian, Z.; Jung, T.; Wang, Y.; Zhang, F.; Tu, L.; Xu, C.; Tian, C.; Li, X.Y. Real-time charging station recommendation system for electric-vehicle taxis. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3098–3109. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, D.; Miao, F.; Chen, J.; He, T.; Lin, S. p^ 2Charging: Proactive Partial Charging for Electric Taxi Systems. In Proceedings of the 2019 IEEE 39th International Conference on Distributed Computing Systems (ICDCS), Dallas, TX, USA, 7–9 July 2019; pp. 688–699. [Google Scholar]
- Yi, Z.; Liu, X.C.; Wei, R.; Chen, X.; Dai, J. Electric vehicle charging demand forecasting using deep learning model. J. Intell. Transp. Syst. 2022, 26, 690–703. [Google Scholar] [CrossRef]
- Zhu, J.; Yang, Z.; Mourshed, M.; Guo, Y.; Zhou, Y.; Chang, Y.; Wei, Y.; Feng, S. Electric vehicle charging load forecasting: A comparative study of deep learning approaches. Energies 2019, 12, 2692. [Google Scholar] [CrossRef]
- Luo, R.; Zhang, Y.; Zhou, Y.; Chen, H.; Yang, L.; Yang, J.; Su, R. Deep learning approach for long-term prediction of electric vehicle (ev) charging station availability. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 3334–3339. [Google Scholar]
- Ullah, I.; Liu, K.; Yamamoto, T.; Zahid, M.; Jamal, A. Prediction of electric vehicle charging duration time using ensemble machine learning algorithm and Shapley additive explanations. Int. J. Energy Res. 2022, 46, 15211–15230. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Svetnik, V.; Liaw, A.; Tong, C.; Culberson, J.C.; Sheridan, R.P.; Feuston, B.P. Random forest: A classification and regression tool for compound classification and QSAR modeling. J. Chem. Inf. Comput. 2003, 43, 1947–1958. [Google Scholar] [CrossRef] [PubMed]
- Hecht, C.; Aghsaee, R.; Schwinger, F.; Figgener, J.; Jarke, M.; Sauer, D.U. Short-term prediction of electric vehicle charging station availability using cascaded machine learning models. In Proceedings of the 6th E-Mobility Power System Integration Symposium, Hague, The Netherlands, 10 October 2022. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | MAE | MSE | RMSE | R | RMSLE | MAPE | TT (s) |
|---|---|---|---|---|---|---|---|
| lightgbm | 21.0785 | 1886.5135 | 43.4328 | 0.1139 | 1.1626 | 3.9587 | 0.9570 |
| rf | 21.6954 | 1968.1448 | 44.3622 | 0.0756 | 1.0931 | 3.3667 | 58.5450 |
| gbr | 21.4235 | 1969.9957 | 44.3835 | 0.0747 | 1.1816 | 4.0781 | 22.8000 |
| lr | 21.9907 | 2067.0375 | 45.4635 | 0.0292 | 1.2245 | 4.4208 | 1.0910 |
| ridge | 21.9907 | 2067.0375 | 45.4635 | 0.0292 | 1.2245 | 4.4208 | 0.0630 |
| lar | 21.9907 | 2067.0375 | 45.4635 | 0.0292 | 1.2245 | 4.4208 | 0.0600 |
| br | 21.9906 | 2067.0375 | 45.4635 | 0.0292 | 1.2245 | 4.4208 | 0.1760 |
| omp | 21.9302 | 2089.3212 | 45.7078 | 0.0187 | 1.2245 | 4.3805 | 0.0600 |
| en | 22.3014 | 2110.1957 | 45.9356 | 0.0089 | 1.2419 | 4.5140 | 0.1830 |
| lasso | 22.3314 | 2114.2666 | 45.9799 | 0.0070 | 1.2427 | 4.5161 | 0.2090 |
| llar | 22.3500 | 2129.1706 | 46.1417 | −0.0000 | 1.2428 | 4.4775 | 0.0700 |
| dummy | 22.3500 | 2129.1705 | 46.1417 | −0.0000 | 1.2428 | 4.4775 | 0.0390 |
| huber | 20.8329 | 2144.1070 | 46.3031 | −0.0070 | 1.1417 | 3.3577 | 2.2830 |
| et | 22.7264 | 2167.9740 | 46.5599 | −0.0183 | 1.1494 | 3.2787 | 38.8670 |
| par | 24.1666 | 2243.1577 | 47.3323 | −0.0537 | 1.2837 | 3.9364 | 0.2330 |
| knn | 23.9175 | 2270.0498 | 47.6439 | −0.0662 | 1.1837 | 3.7279 | 159.2090 |
| ada | 37.0643 | 3298.0843 | 57.4235 | −0.5492 | 1.5346 | 8.3365 | 4.8830 |
| dt | 28.4673 | 3802.5382 | 61.6637 | −0.7862 | 1.3677 | 3.3913 | 1.8300 |
| Request Time | MAE | RMSE | MAD |
|---|---|---|---|
| 1 | 15.70 | 35.22 | 8 |
| 2 | 15.50 | 35.13 | 8 |
| 5 | 14.76 | 34.80 | 8 |
| 10 | 13.31 | 34.18 | 5 |
| 20 | 11.74 | 33.53 | 0 |
| 30 | 7.54 | 31.56 | 0 |
| Request Time | MAE | RMSE | MAD |
|---|---|---|---|
| 1 | 16.98 | 36.62 | 10 |
| 2 | 17.48 | 37.3 | 10 |
| 5 | 18.48 | 38.94 | 11 |
| 10 | 20.28 | 42.13 | 12 |
| 20 | 22.79 | 46.72 | 14 |
| 30 | 36.28 | 69.69 | 20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aghsaee, R.; Hecht, C.; Schwinger, F.; Figgener, J.; Jarke, M.; Sauer, D.U. Data-Driven, Short-Term Prediction of Charging Station Occupation. Electricity 2023, 4, 134-153. https://doi.org/10.3390/electricity4020009
Aghsaee R, Hecht C, Schwinger F, Figgener J, Jarke M, Sauer DU. Data-Driven, Short-Term Prediction of Charging Station Occupation. Electricity. 2023; 4(2):134-153. https://doi.org/10.3390/electricity4020009
Chicago/Turabian StyleAghsaee, Roya, Christopher Hecht, Felix Schwinger, Jan Figgener, Matthias Jarke, and Dirk Uwe Sauer. 2023. "Data-Driven, Short-Term Prediction of Charging Station Occupation" Electricity 4, no. 2: 134-153. https://doi.org/10.3390/electricity4020009
APA StyleAghsaee, R., Hecht, C., Schwinger, F., Figgener, J., Jarke, M., & Sauer, D. U. (2023). Data-Driven, Short-Term Prediction of Charging Station Occupation. Electricity, 4(2), 134-153. https://doi.org/10.3390/electricity4020009