
Caninoid Necro-Robots: Geometrically Selected Rearticulation of Canine Mandibles †

 , , , , , , and
, , , , , , and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
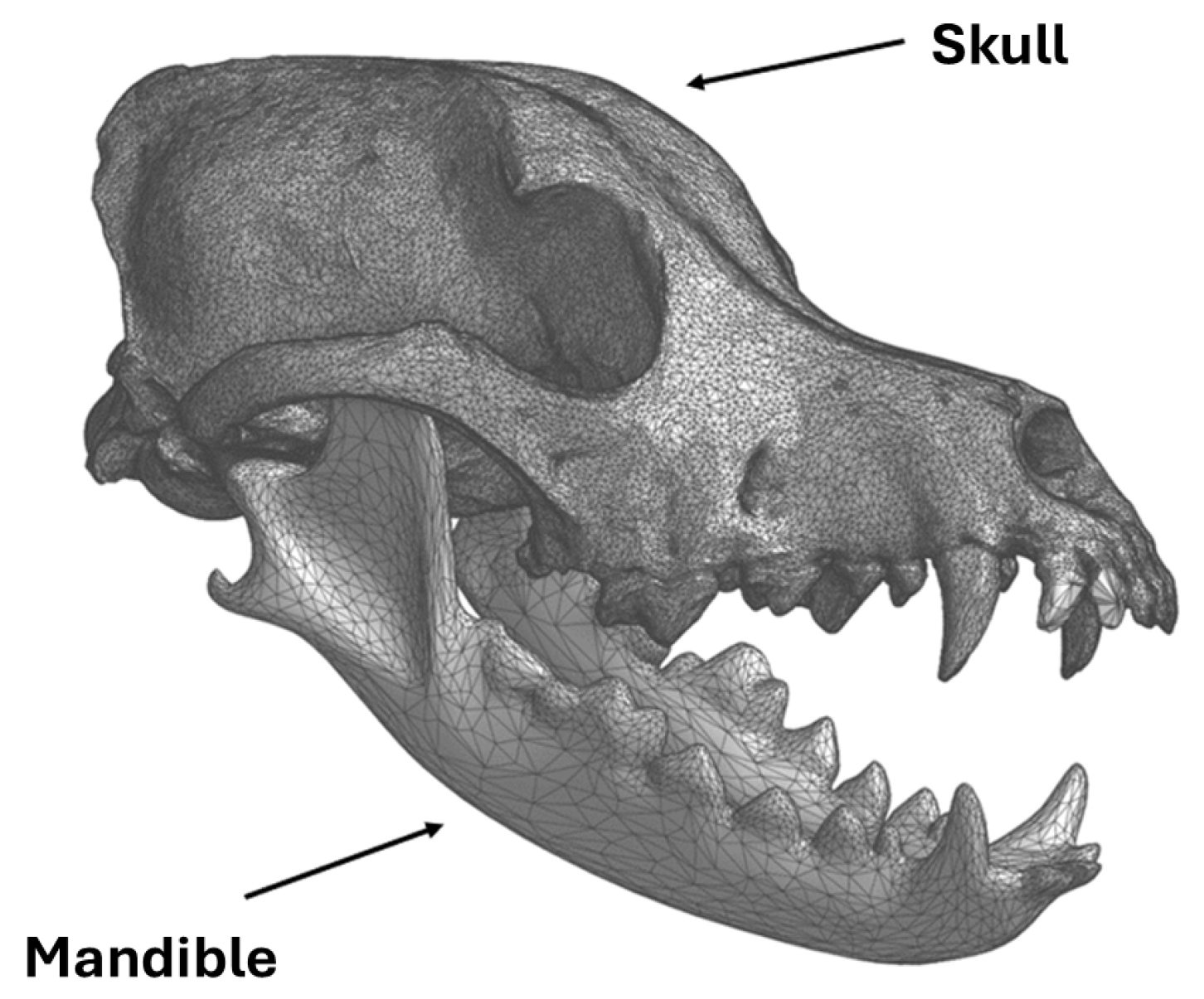
2.1. 3D Scanning
2.2. FEA
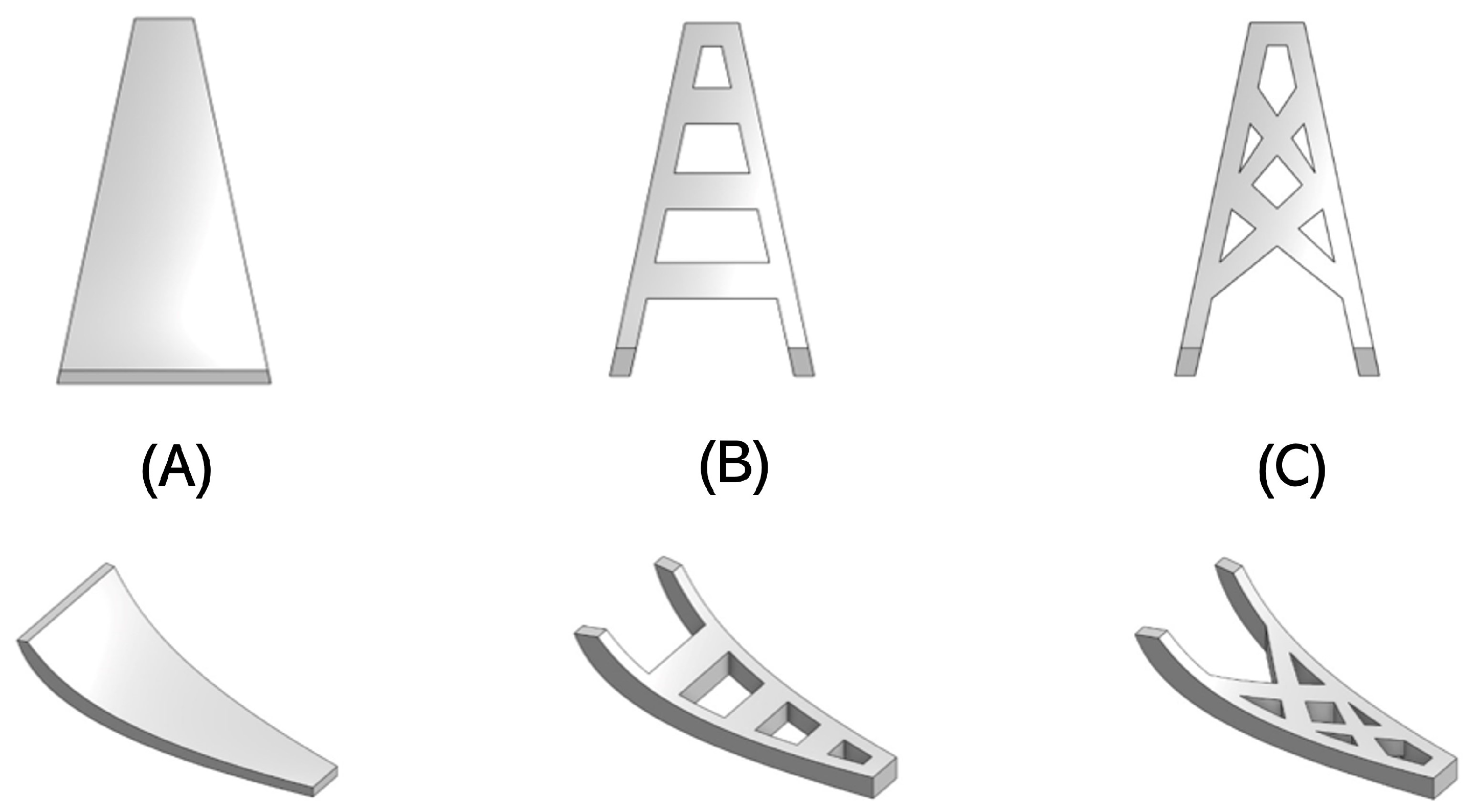
2.3. Reinforcement Design
2.4. Recreating Natural Weakness
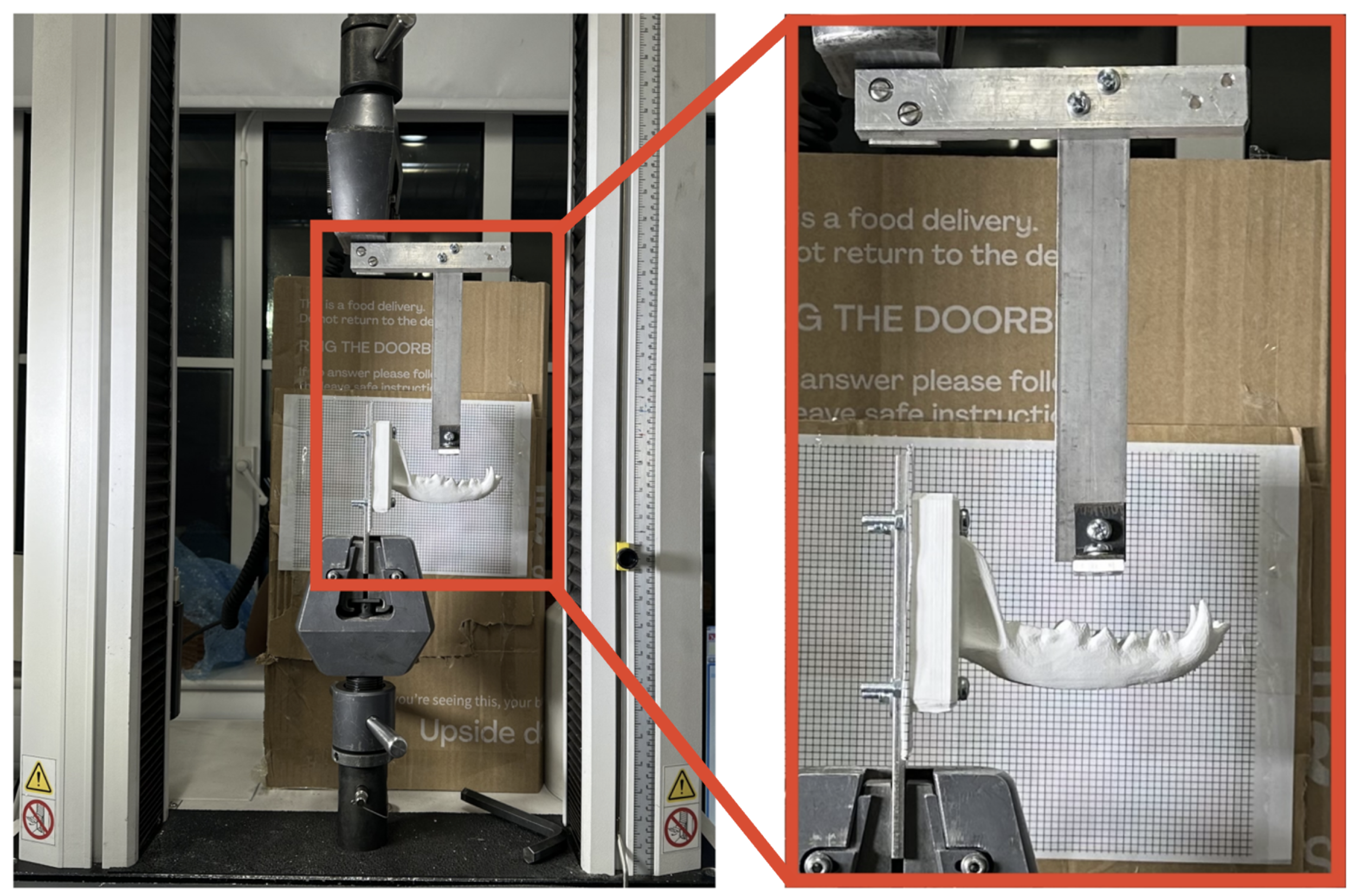
2.5. Mechanical Testing
3. Results and Discussion
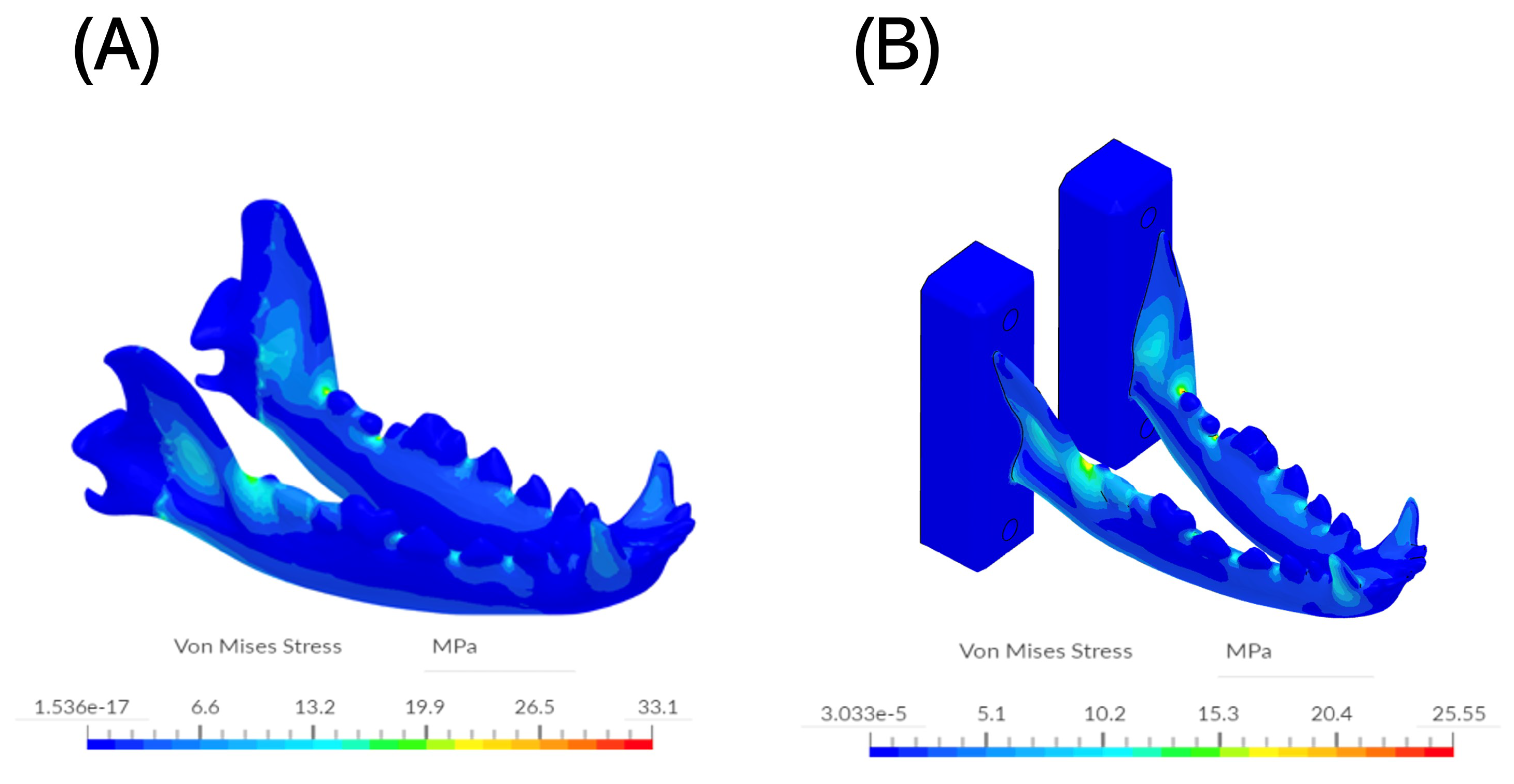
3.1. FEA Results
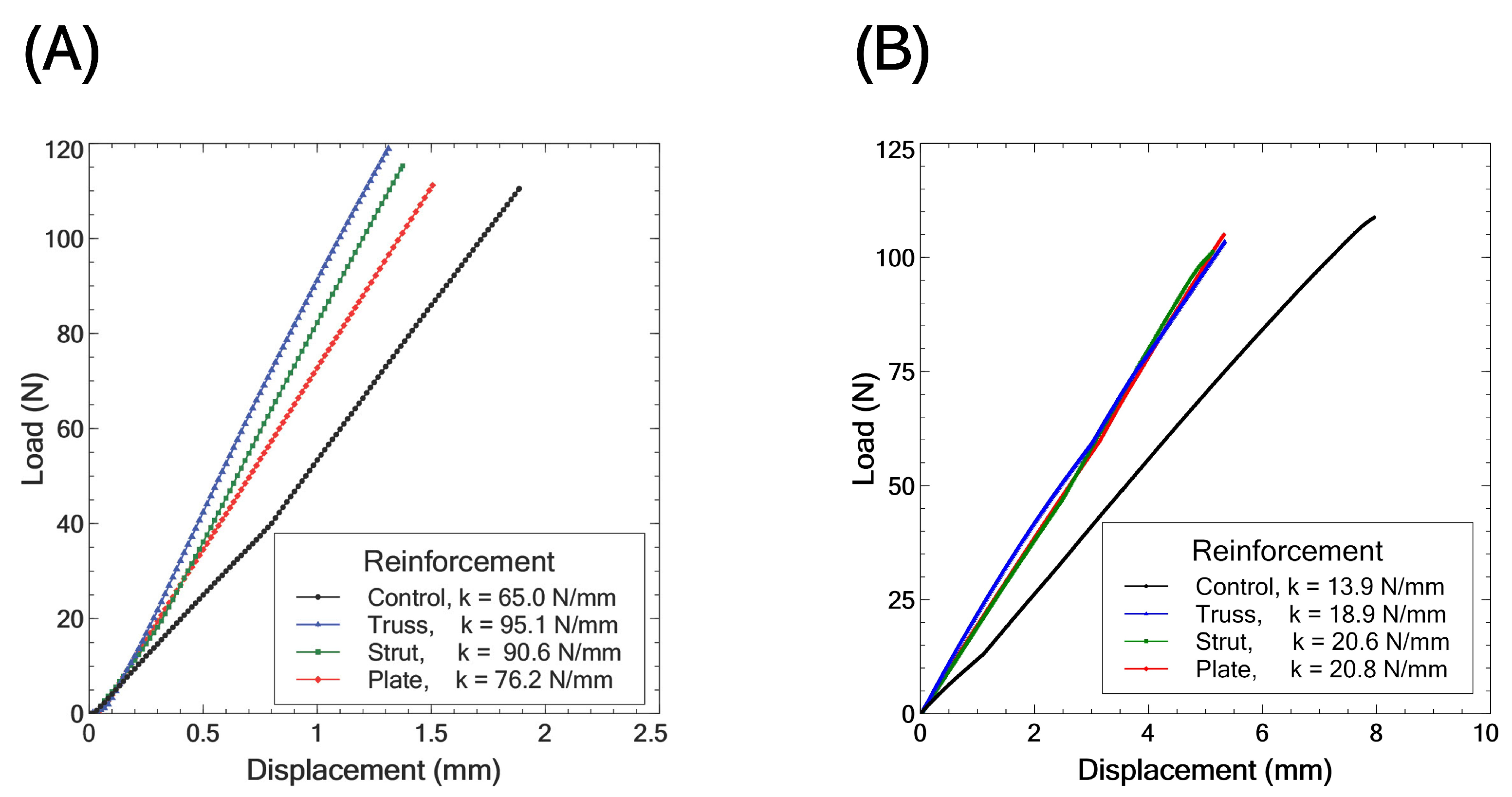
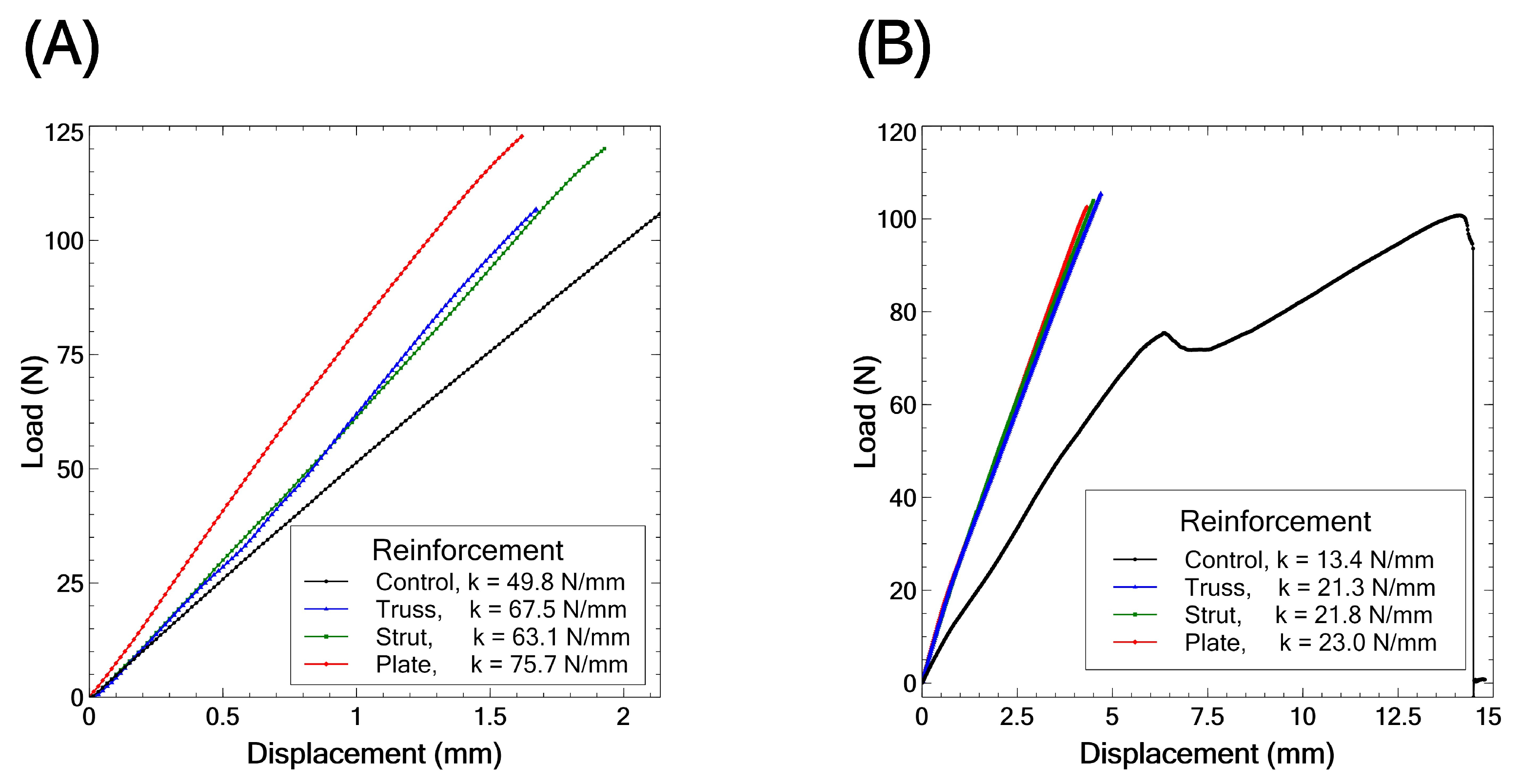
3.2. Testing Results
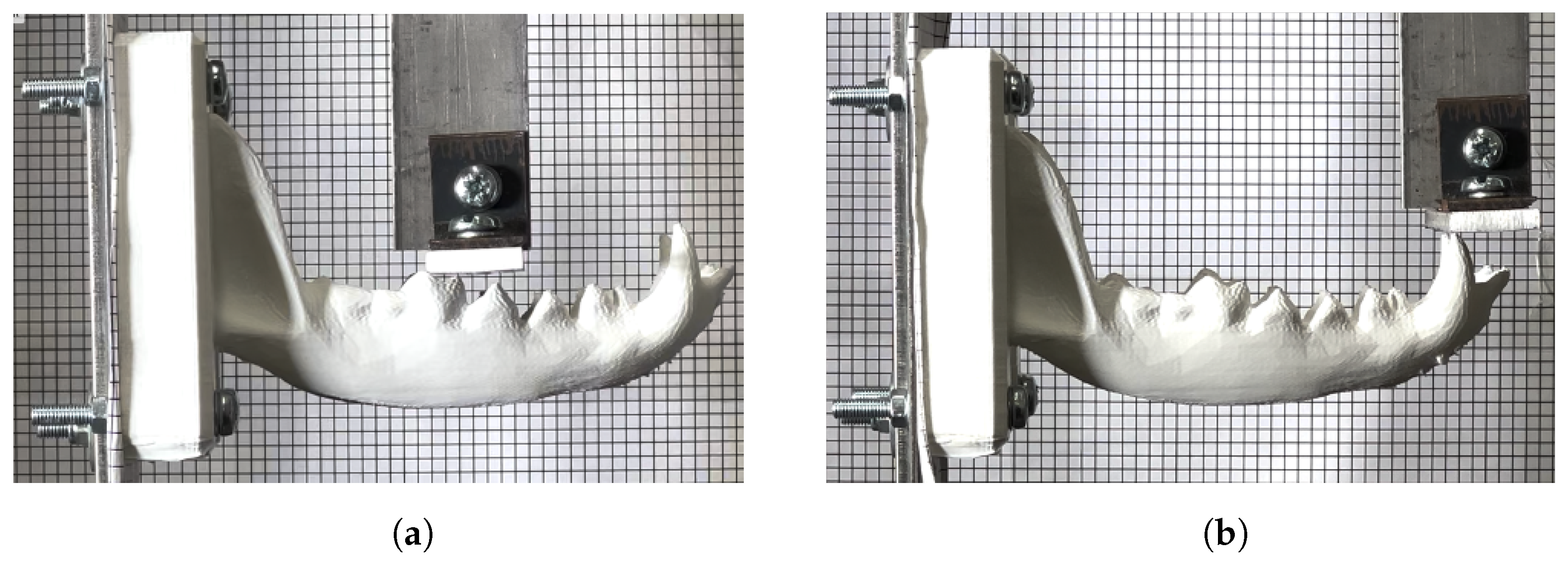
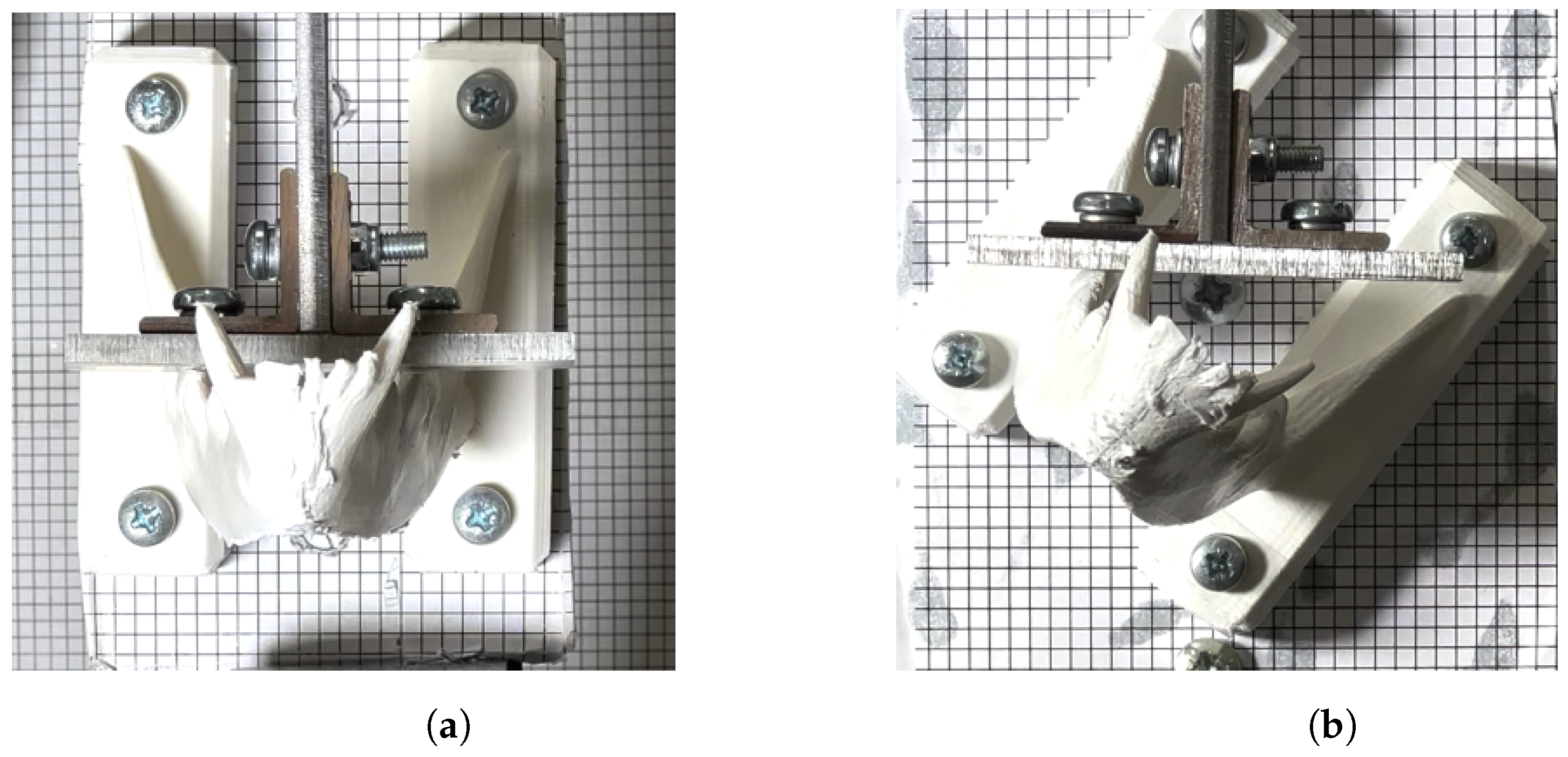
3.2.1. FFF Mandible Archetype Testing
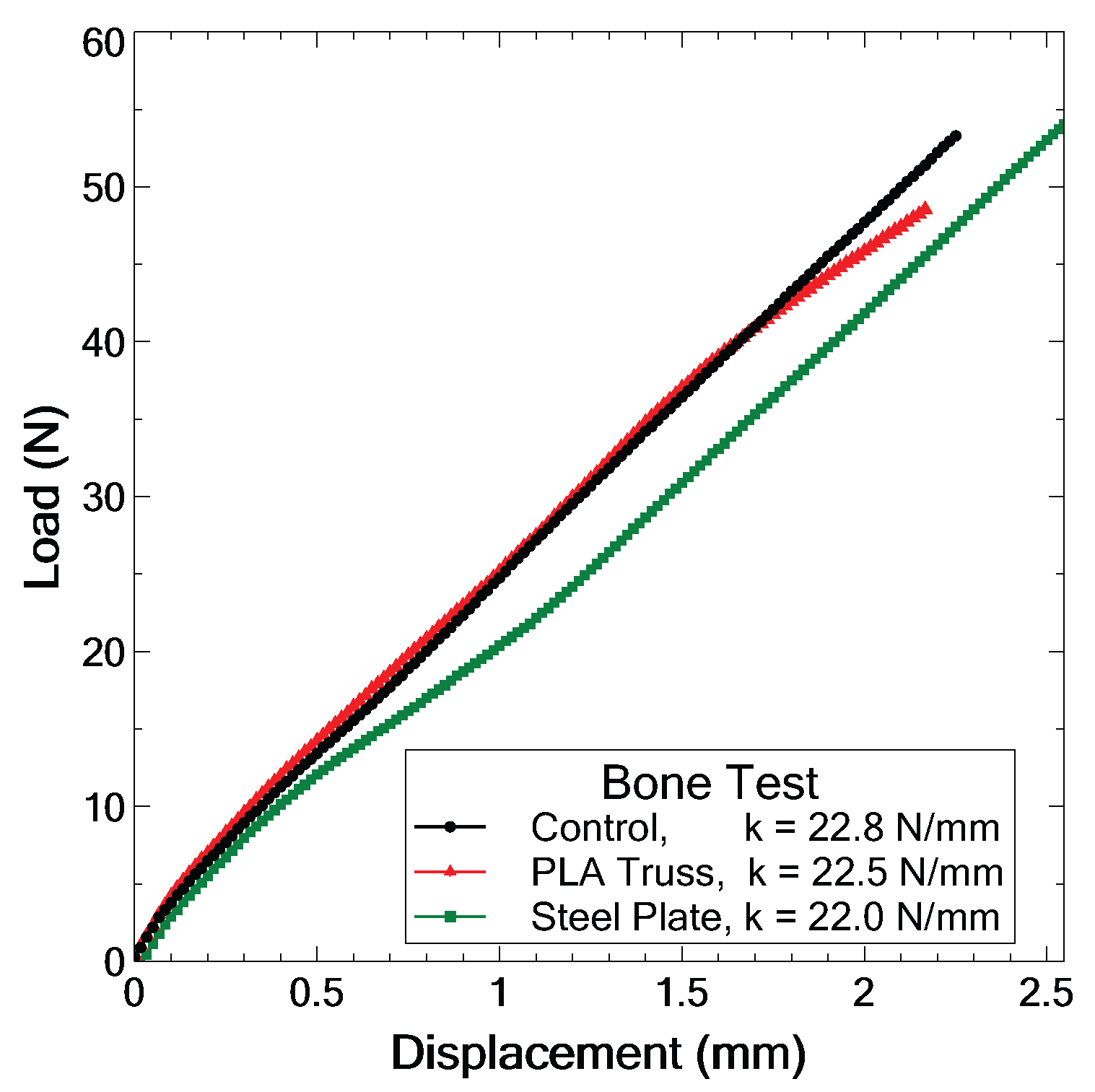
3.2.2. Bone Testing
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| FEA | Finite Element Analysis |
| FEM | Finite Element Modeling |
| FFF | Fused Filament Fabrication |
| CAD | Computer-Aided Design |
References
- Fankhauser, S.; Smith, S.; Allen, M.; Axelsson, K.; Hale, T.; Hepburn, C.; Kendall, J.; Khosla, R.; Lezaun, J.; Mitchell-Larson, E.; et al. The meaning of net zero and how to get it right. Nat. Clim. Chang. 2022, 12, 15–21. [Google Scholar] [CrossRef]
- Wiesemüller, F.; Miriyev, A.; Kovac, M. Zero-footprint eco-robotics: A new perspective on biodegradable robots. In Proceedings of the 2021 Aerial Robotic Systems Physically Interacting with the Environment (AIRPHARO), Biograd na Moru, Croatia, 4–5 October 2021; pp. 1–6. [Google Scholar]
- Rehamn, A.; Mack, J.; Alam, P. From e-waste to robots: A case study on e-waste upcycling in low-to-middle income countries. In Proceedings of the 2021 IEEE International Humanitarian Technology Conference (IHTC), Virtual, 2–4 December 2021; pp. 1–4. [Google Scholar]
- Liu, Z.; Gu, Y.; Yu, L.; Yang, X.; Ma, Z.; Zhao, J.; Gu, Y. Locomotion Control of Cyborg Insects by Charge-Balanced Biphasic Electrical Stimulation. Cyborg Bionic Syst. 2024, 5, 0134. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, H.D.; Tan, P.; Sato, H.; Doan, T.T.V. Ultra-Lightweight Cyborg Insect: Sideways walking of remote-controlled living beetle with a miniature backpack. In Proceedings of the 2019 IEEE International Conference on Cyborg and Bionic Systems (CBS), Munich, Germany, 18–20 September 2019; pp. 11–16. [Google Scholar] [CrossRef]
- Cao, F.; Zhang, C.; Vo Doan, T.T.; Li, Y.; Sangi, D.H.; Koh, J.S.; Huynh, N.A.; Aziz, M.F.B.; Choo, H.Y.; Ikeda, K.; et al. A Biological Micro Actuator: Graded and Closed-Loop Control of Insect Leg Motion by Electrical Stimulation of Muscles. PLoS ONE 2014, 9, e105389. [Google Scholar] [CrossRef] [PubMed]
- Shoji, K.; Morishima, K.; Akiyama, Y.; Nakamura, N.; Ohno, H. Autonomous environmental monitoring by self-powered biohybrid robot. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 629–634. [Google Scholar] [CrossRef]
- Vo-Doan, T.T.; Dung, V.T.; Sato, H. A Cyborg Insect Reveals a Function of a Muscle in Free Flight. Cyborg Bionic Syst. 2022, 2022, 9780504. [Google Scholar] [CrossRef] [PubMed]
- Yap, T.; Liu, Z.; Rajappan, A.; Shimokusu, T.; Preston, D. Necrobotics: Biotic Materials as Ready-to-Use Actuators. Adv. Sci. 2022, 9, 2201174. [Google Scholar] [CrossRef] [PubMed]
- Nyakatura, J.; Melo, K.; Horvat, T.; Karakasiliotis, K.; Allen, V.; Andikfar, A.; Andrada, E.; Arnold, P.; Lauströer, J.; Hutchinson, J.; et al. Reverse-engineering the locomotion of a stem amniote. Nature 2019, 565, 351–355. [Google Scholar] [CrossRef] [PubMed]
- Tarafdar, A.; Gaur, V.; Rawat, N.; Wankhade, P.; Gaur, G.; Awasthi, M.; Sagar, N.; Sirohi, R. Advances in biomaterial production from animal derived waste. Bioengineered 2021, 12, 8247–8258. [Google Scholar] [CrossRef] [PubMed]
- Anal, A. Food processing by-products and their utilization: Introduction. In Food Processing By-Products and Their Utilization; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2017; pp. 1–10. [Google Scholar]
- Eriksen, A.; Nielsen, T.; Matthiesen, H.; Carøe, C.; Hansen, L.; Gregory, D.; Turner-Walker, G.; Collins, M.; Gilbert, M. Bone biodeterioration—The effect of marine and terrestrial depositional environments on early diagenesis and bone bacterial community. PLoS ONE 2020, 15, e0240512. [Google Scholar] [CrossRef]
- Reddy, P.; Suresh, V. A review on importance of universal gripper in industrial robot applications. Int. J. Mech. Eng. Robot. Res. 2013, 2, 255–264. [Google Scholar]
- Umphlet, R.; Johnson, A. Mandibular fractures in the dog a retrospective study of 157 cases. Vet. Surg. 1990, 19, 272–275. [Google Scholar] [CrossRef] [PubMed]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jørgensen, B.; Powell, O.; Coen, F.; Lord, J.; Ng, Y.H.; Brennan, J.; Bergkvist, G.T.; Alam, P. Caninoid Necro-Robots: Geometrically Selected Rearticulation of Canine Mandibles. Mater. Proc. 2025, 20, 5. https://doi.org/10.3390/materproc2025020005
Jørgensen B, Powell O, Coen F, Lord J, Ng YH, Brennan J, Bergkvist GT, Alam P. Caninoid Necro-Robots: Geometrically Selected Rearticulation of Canine Mandibles. Materials Proceedings. 2025; 20(1):5. https://doi.org/10.3390/materproc2025020005
Chicago/Turabian StyleJørgensen, Ben, Oscar Powell, Freddie Coen, Jack Lord, Yang Han Ng, Jeremiah Brennan, Gurå Therese Bergkvist, and Parvez Alam. 2025. "Caninoid Necro-Robots: Geometrically Selected Rearticulation of Canine Mandibles" Materials Proceedings 20, no. 1: 5. https://doi.org/10.3390/materproc2025020005
APA StyleJørgensen, B., Powell, O., Coen, F., Lord, J., Ng, Y. H., Brennan, J., Bergkvist, G. T., & Alam, P. (2025). Caninoid Necro-Robots: Geometrically Selected Rearticulation of Canine Mandibles. Materials Proceedings, 20(1), 5. https://doi.org/10.3390/materproc2025020005