
Indirect Measurement of Tensile Strength of Materials by Grey Prediction Models GMC(1,n) and GM(1,n) †

Abstract
1. Introduction
2. Grey Prediction Model
2.1. Traditional Grey Prediction Model GM(1,n)
2.2. Grey Convolution Prediction Model GMC(1,n)
3. Application Example
3.1. Indirect Measurement Using the Traditional Grey Prediction Model GM(1,2)
3.2. Indirect Measurement Using the Grey Prediction Model GMC(1,2)
4. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Deng, J.L. The Elementary Method of Grey System; Huazhong University of Science and Technology Press: Wuhan, China, 1987. (In Chinese) [Google Scholar]
- Hu, L. Grey System Theory and Its Application; Science and Technological Reference Press: Beijing, China, 1992. (In Chinese) [Google Scholar]
- Deng, J.L. Control problems of grey systems. Syst. Control Lett. 1982, 1, 288–294. [Google Scholar]
- Wang, Y.; Zhang, G.; Moon, K.S.; Sutherland, J.W. Compensation for the thermal error of a multi-axis machining center. J. Mater. Process. Technol. 1998, 75, 45–53. [Google Scholar] [CrossRef]
- Tien, T.L. The indirect measurement of tensile strength of material by the grey prediction model GMC(1,n). Meas. Sci. Technol. 2005, 16, 1322–1328. [Google Scholar] [CrossRef]
- Erwin, K. Advanced Engineering Mathematics; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1999. [Google Scholar]
- Samuel, L.H. Metal Data; Reinhold Publishing Corporation: New York, NY, USA, 1952. [Google Scholar]

{kind=link}
{kind=link}
| i (Temperature) | ||
|---|---|---|
| 1 (400 °F) | 897 | 514 |
| 2 (500 °F) | 897 | 495 |
| 3 (600 °F) | 890 | 444 |
| 4 (700 °F) | 876 | 401 |
| 5 (800 °F) | 848 | 352 |
| 6 (900 °F) | 814 | 293 |
| 7 (1000 °F) | 779 | 269 |
| 8 (1100 °F) | 738 | 235 |
| 9 (1200 °F) | 669 | 201 |
| 10 (1300 °F) | 600 | 187 |
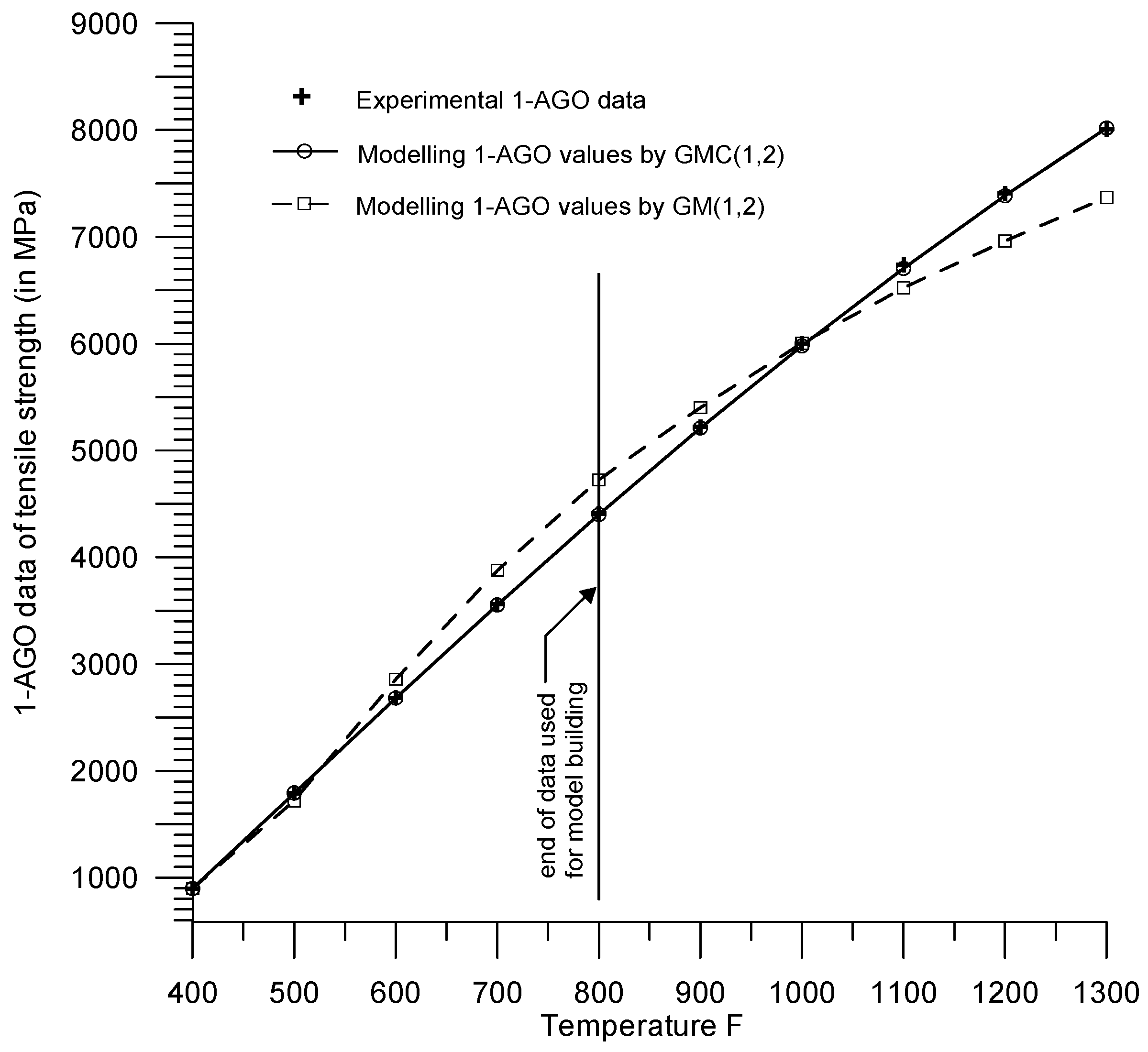
| i (Temperature) | (Mpa) | (Mpa) by GM(1,2) | Error Percentage |
|---|---|---|---|
| 1 (400 °F) | 897 | 897 | 0.00% |
| 2 (500 °F) | 1794 | 1718.818 | −4.19% |
| 3 (600 °F) | 2684 | 2855.437 | 6.39% |
| 4 (700 °F) | 3560 | 3876.406 | 8.89% |
| 5 (800 °F) | 4408 | 4725.202 | 7.20% |
| 6 (900 °F) | 5222 | 5402.259 | 3.45% |
| 7 (1000 °F) | 6001 | 6004.459 | 0.06% |
| 8 (1100 °F) | 6739 | 6522.629 | −3.21% |
| 9 (1200 °F) | 7408 | 6962.540 | −6.01% |
| 10 (1300 °F) | 8008 | 7370.211 | −7.96% |
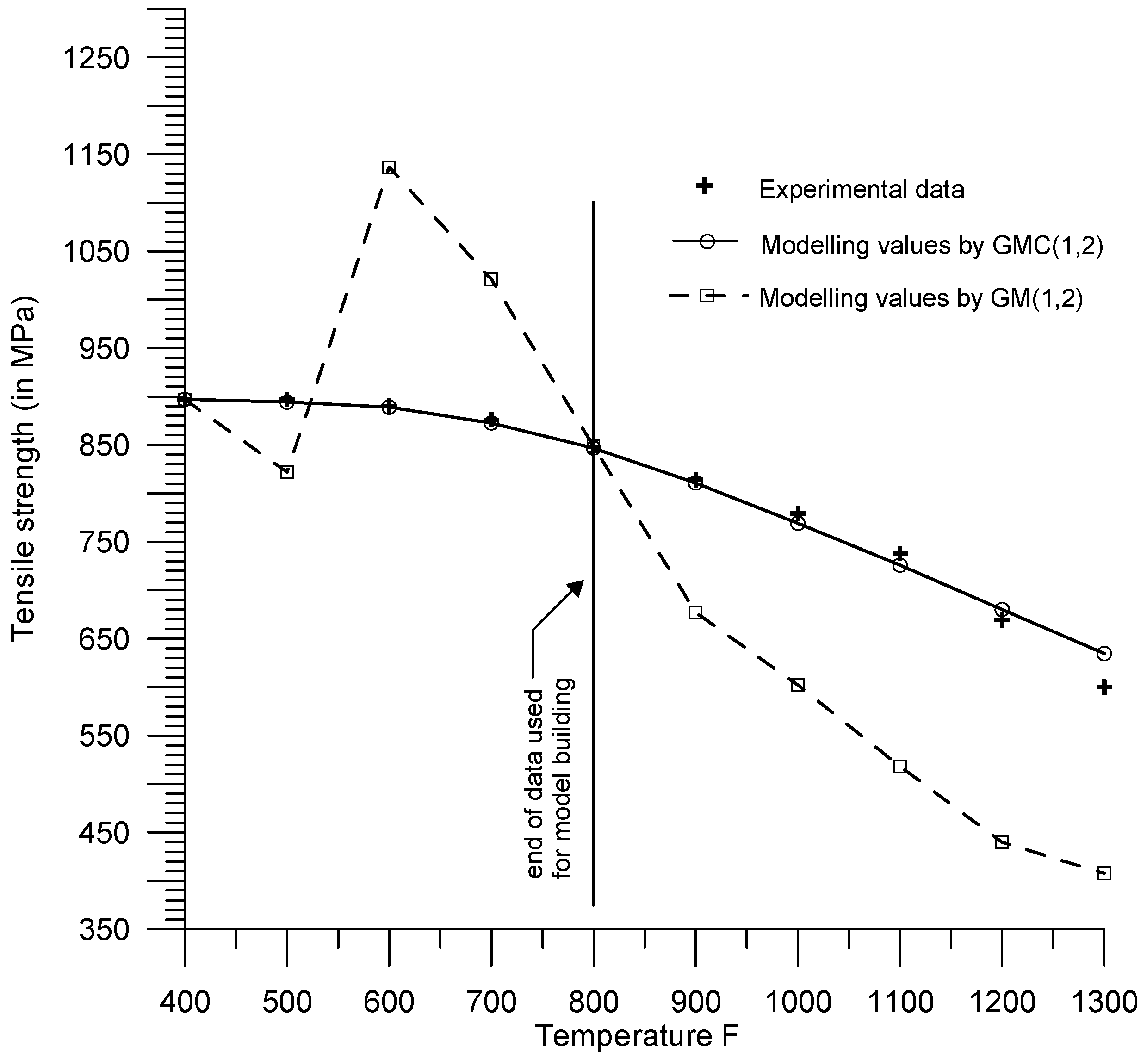
| i (Temperature) | (MPa) | (MPa) | Error Percentage |
|---|---|---|---|
| 1 (400 °F) | 897 | 897 | 0.00% |
| 2 (500 °F) | 897 | 821.817 | −8.38% |
| 3 (600 °F) | 890 | 1136.620 | 27.71% |
| 4 (700 °F) | 876 | 1020.969 | 16.55% |
| 5 (800 °F) | 848 | 848.796 | 0.09% |
| 6 (900 °F) | 814 | 677.057 | −16.82% |
| 7 (1000 °F) | 779 | 602.201 | −22.70% |
| 8 (1100 °F) | 738 | 518.170 | −29.79% |
| 9 (1200 °F) | 669 | 439.911 | −34.24% |
| 10 (1300 °F) | 600 | 407.670 | −32.06% |
| i (Temperature) | (Mpa) | (Mpa) by GMC(1,2) | Error Percentage |
|---|---|---|---|
| 1 (400 °F) | 897 | 897 | 0.00% |
| 2 (500 °F) | 1794 | 1791.082 | −0.16% |
| 3 (600 °F) | 2684 | 2680.052 | −0.15% |
| 4 (700 °F) | 3560 | 3552.624 | −0.21% |
| 5 (800 °F) | 4408 | 4399.342 | −0.20% |
| 6 (900 °F) | 5222 | 5210.033 | −0.23% |
| 7 (1000 °F) | 6001 | 5979.135 | −0.36% |
| 8 (1100 °F) | 6739 | 6705.057 | −0.50% |
| 9 (1200 °F) | 7408 | 7385.154 | −0.31% |
| 10 (1300 °F) | 8008 | 8019.705 | 0.15% |
| i (Temperature) | (MPa) | (MPa) | Error Percentage |
|---|---|---|---|
| 1(400 °F) | 897 | 897 | 0.00% |
| 2(500 °F) | 897 | 894.082 | −0.33% |
| 3(600 °F) | 890 | 888.971 | −0.12% |
| 4(700 °F) | 876 | 872.572 | −0.39% |
| 5(800 °F) | 848 | 846.719 | −0.15% |
| 6(900 °F) | 814 | 810.690 | −0.41% |
| 7(1000 °F) | 779 | 769.102 | −1.27% |
| 8(1100 °F) | 738 | 752.922 | −1.64% |
| 9(1200 °F) | 669 | 680.097 | 1.66% |
| 10(1300 °F) | 600 | 634.551 | 5.76% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tien, T.-L. Indirect Measurement of Tensile Strength of Materials by Grey Prediction Models GMC(1,n) and GM(1,n). Eng. Proc. 2025, 92, 4. https://doi.org/10.3390/engproc2025092004
Tien T-L. Indirect Measurement of Tensile Strength of Materials by Grey Prediction Models GMC(1,n) and GM(1,n). Engineering Proceedings. 2025; 92(1):4. https://doi.org/10.3390/engproc2025092004
Chicago/Turabian StyleTien, Tzu-Li. 2025. "Indirect Measurement of Tensile Strength of Materials by Grey Prediction Models GMC(1,n) and GM(1,n)" Engineering Proceedings 92, no. 1: 4. https://doi.org/10.3390/engproc2025092004
APA StyleTien, T.-L. (2025). Indirect Measurement of Tensile Strength of Materials by Grey Prediction Models GMC(1,n) and GM(1,n). Engineering Proceedings, 92(1), 4. https://doi.org/10.3390/engproc2025092004